Downloaded 35 times
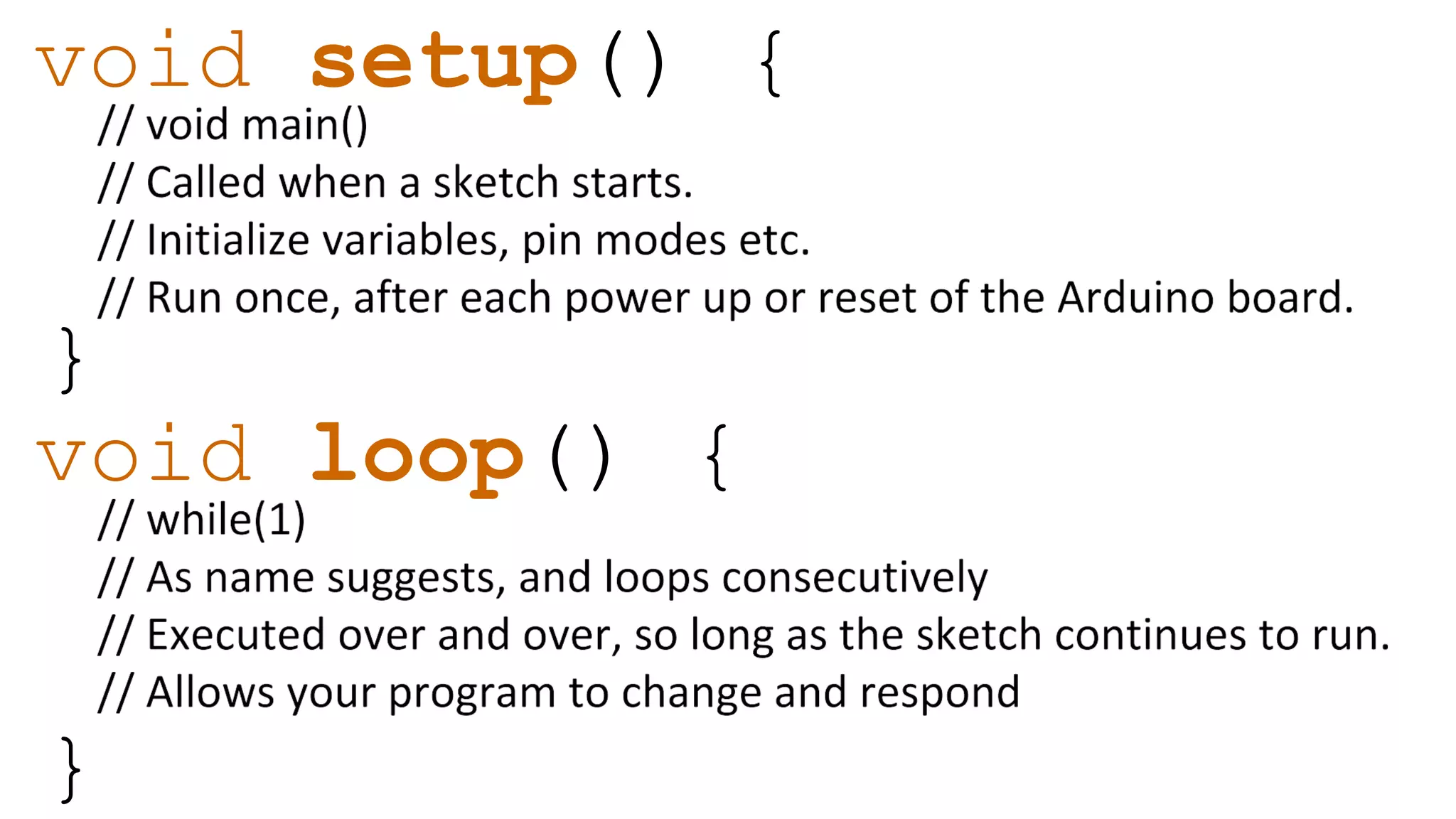
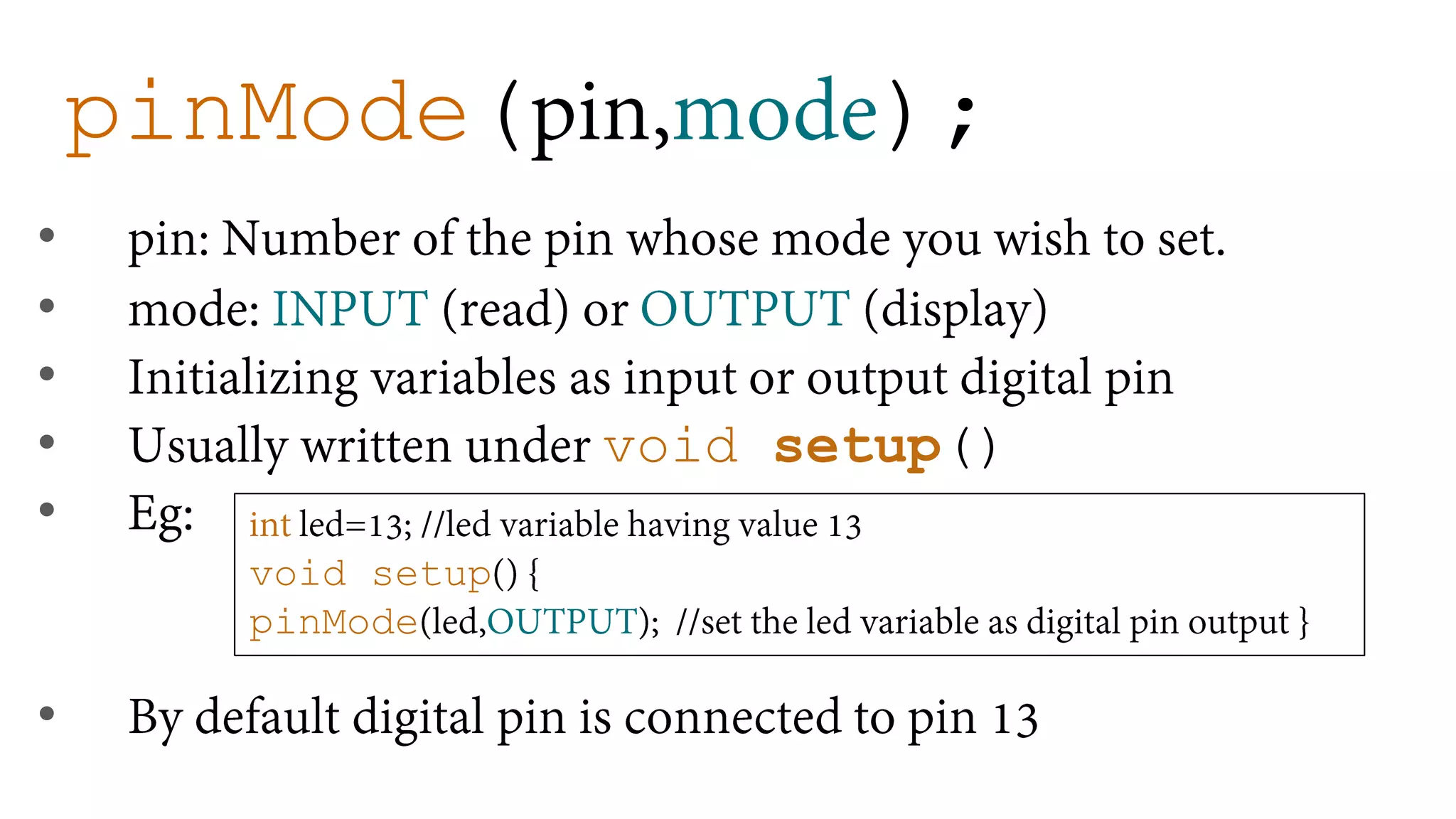
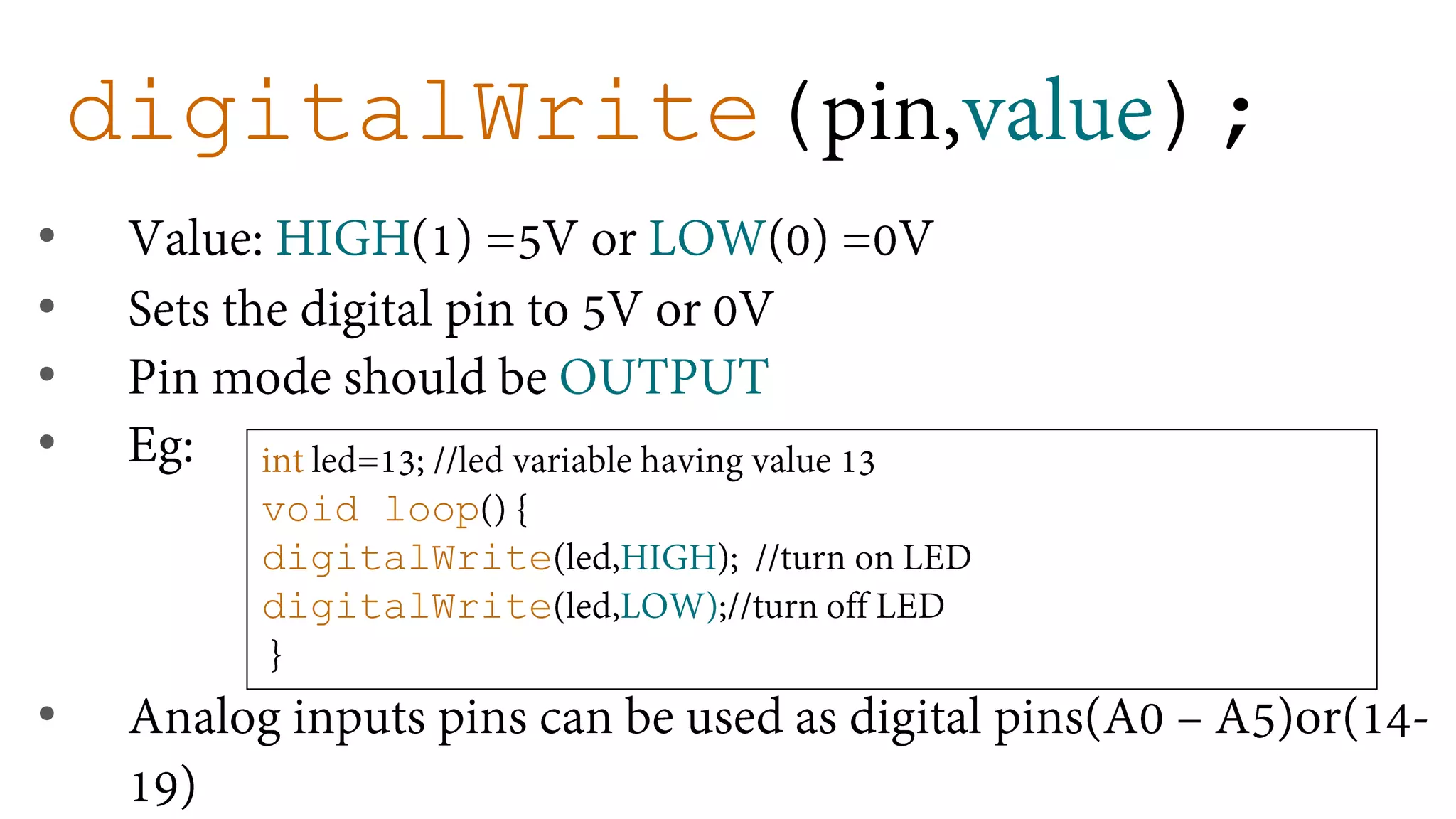
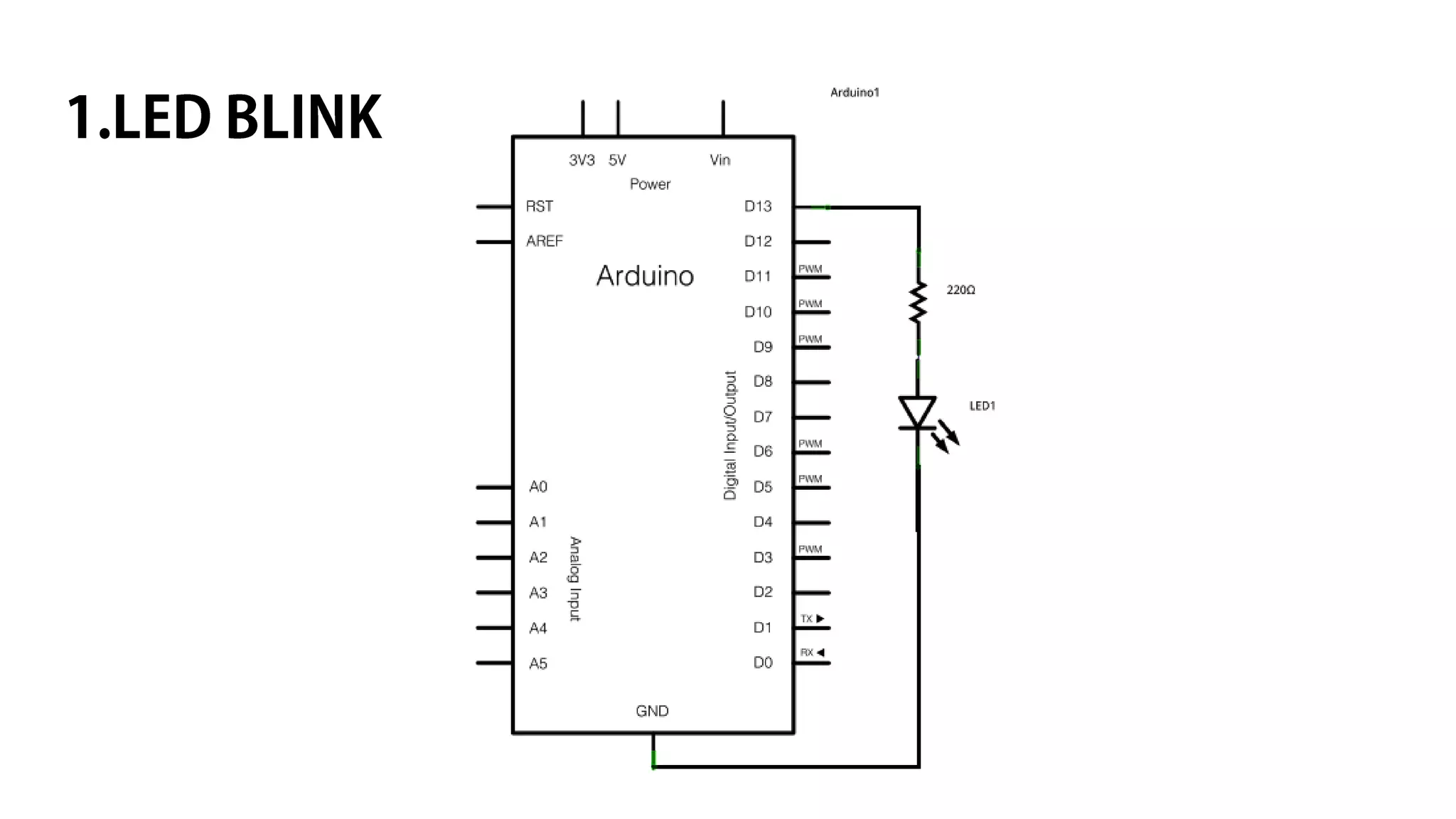
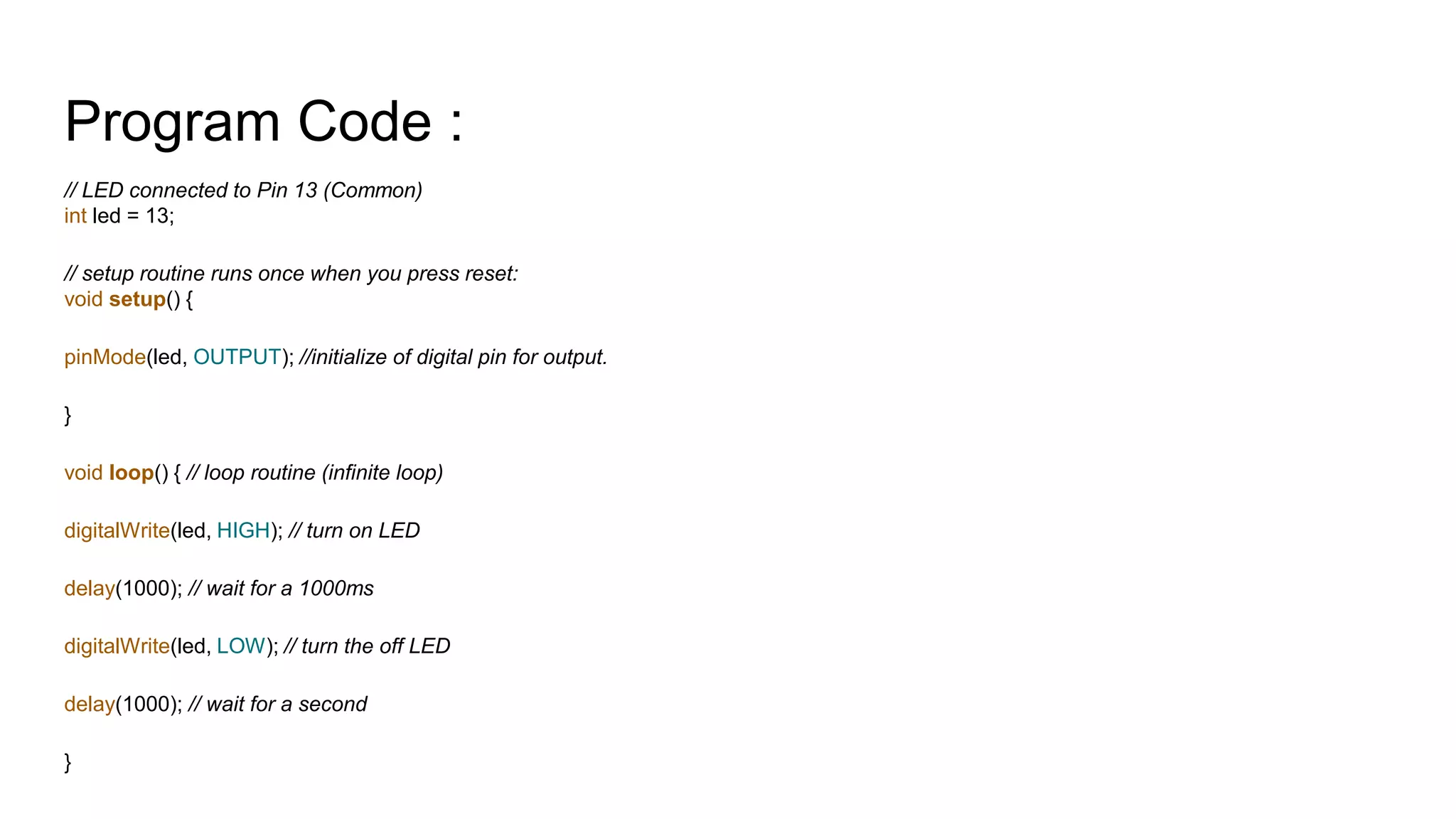
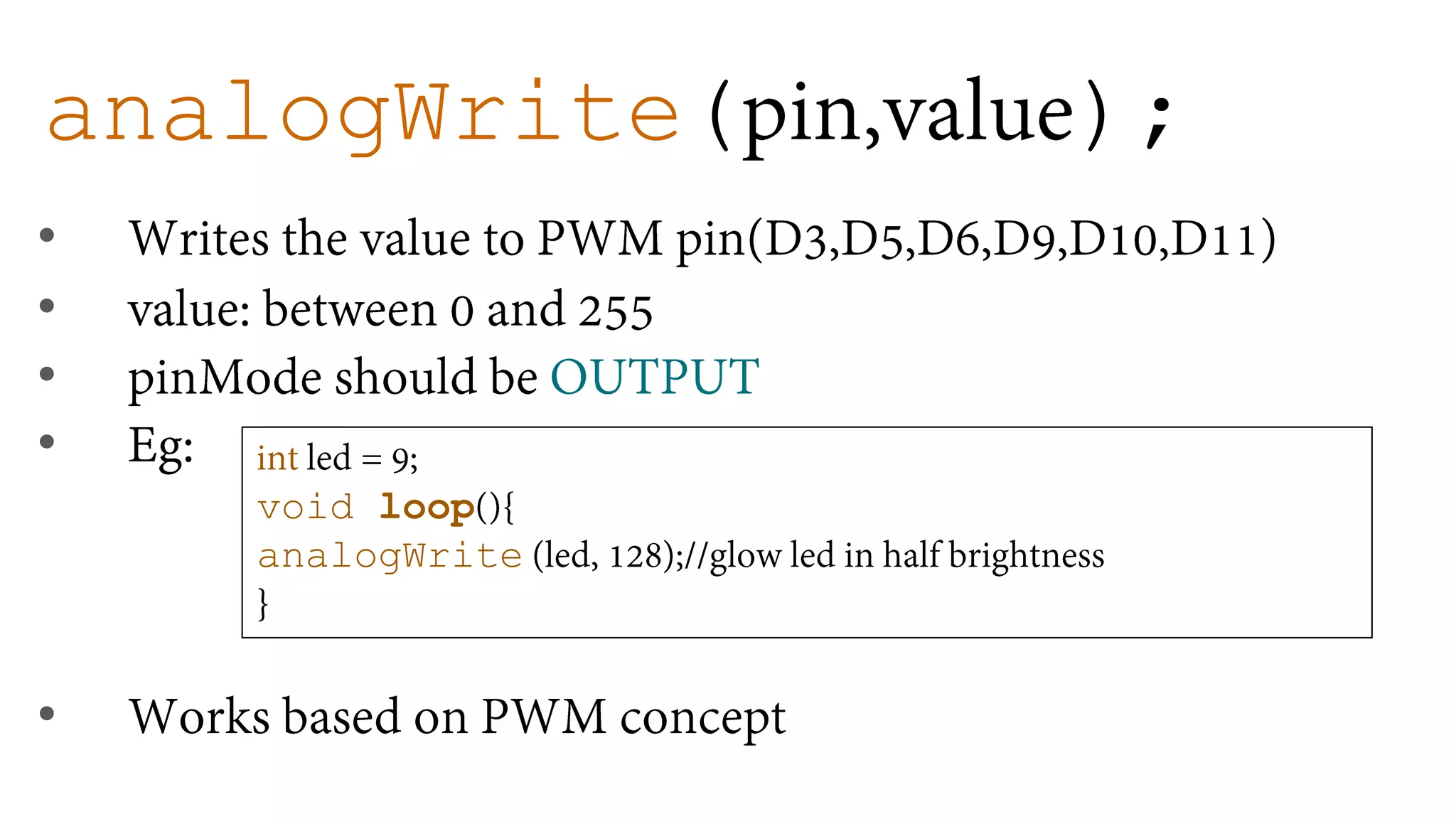
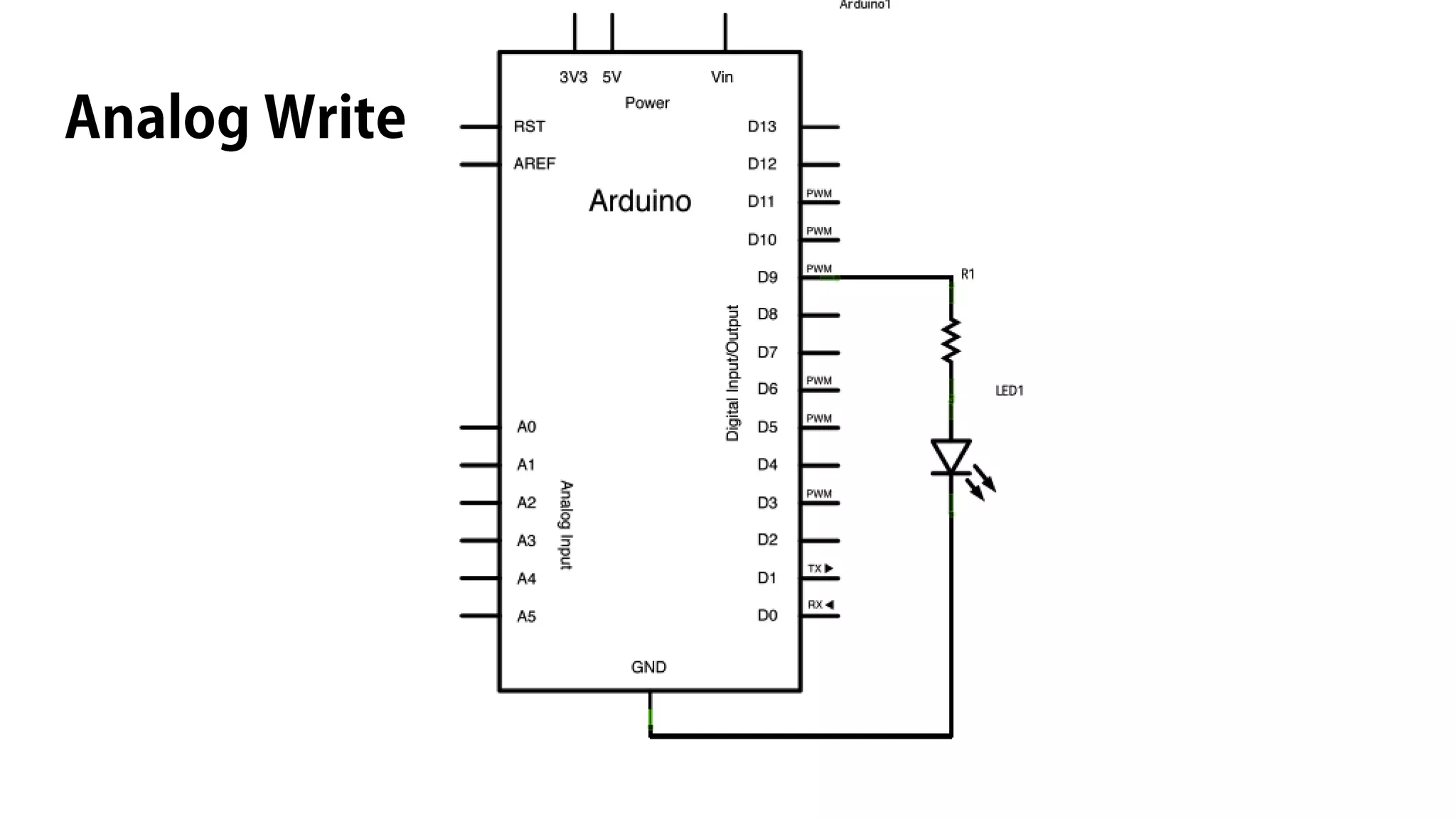
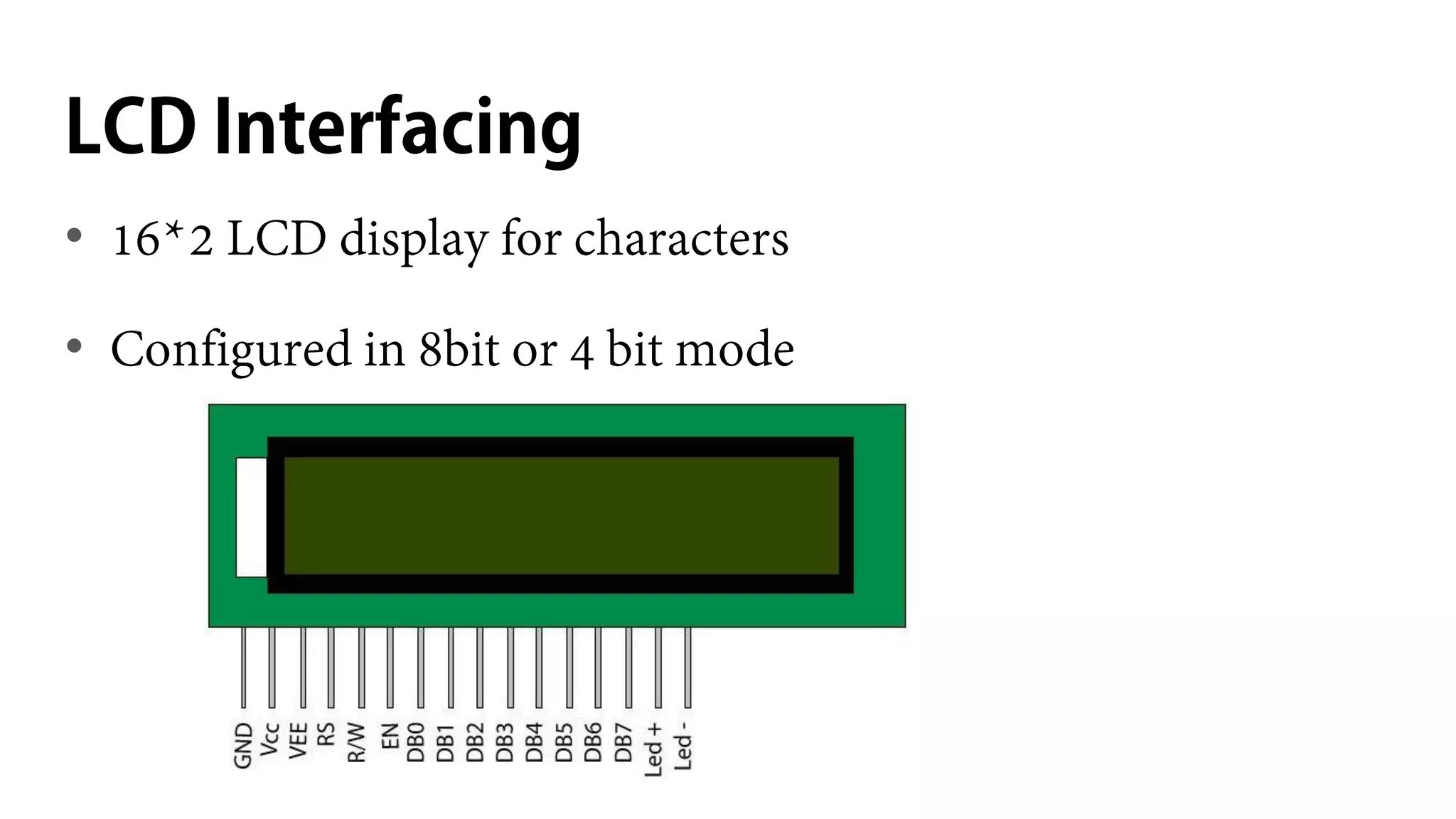
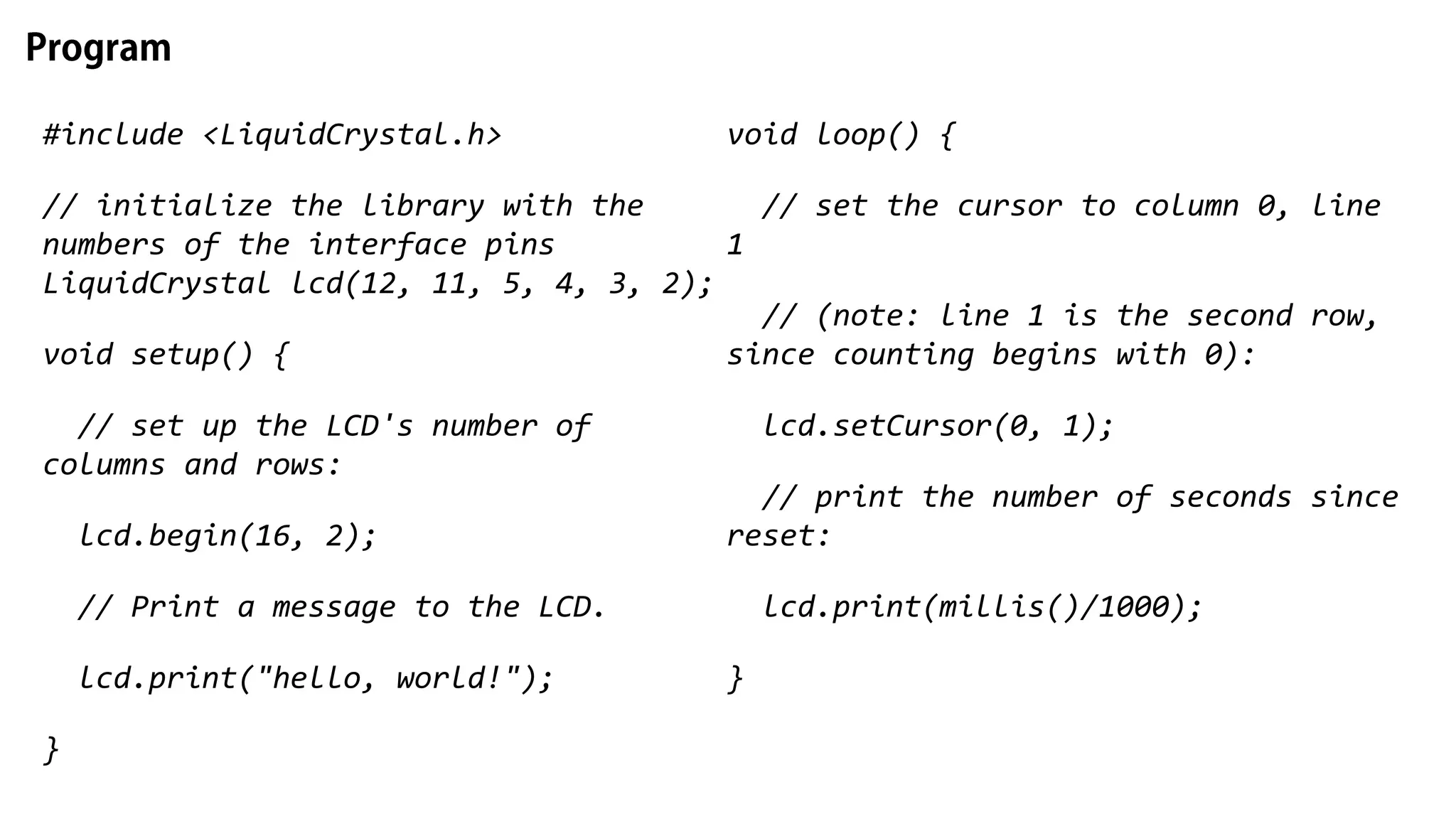
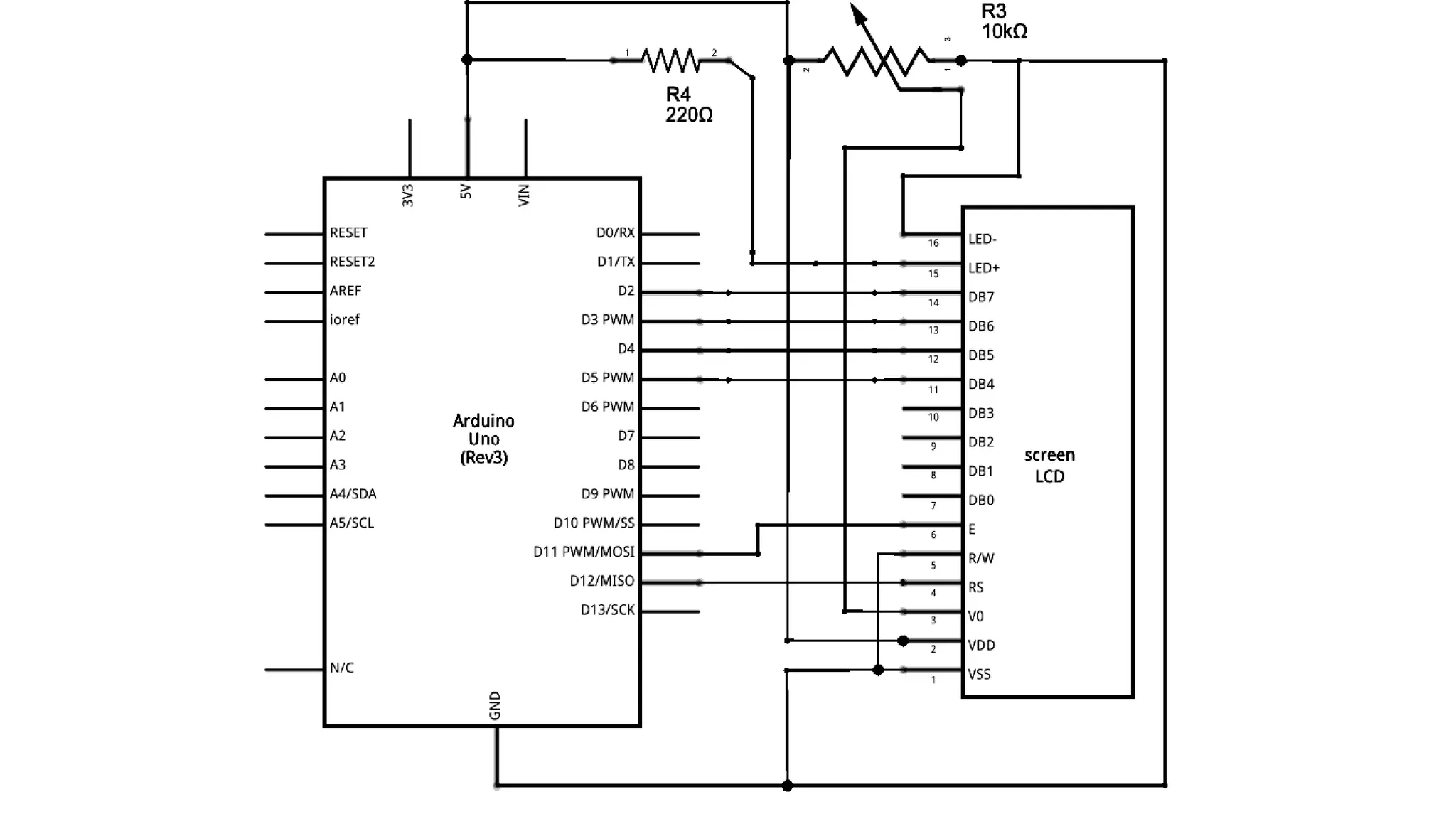

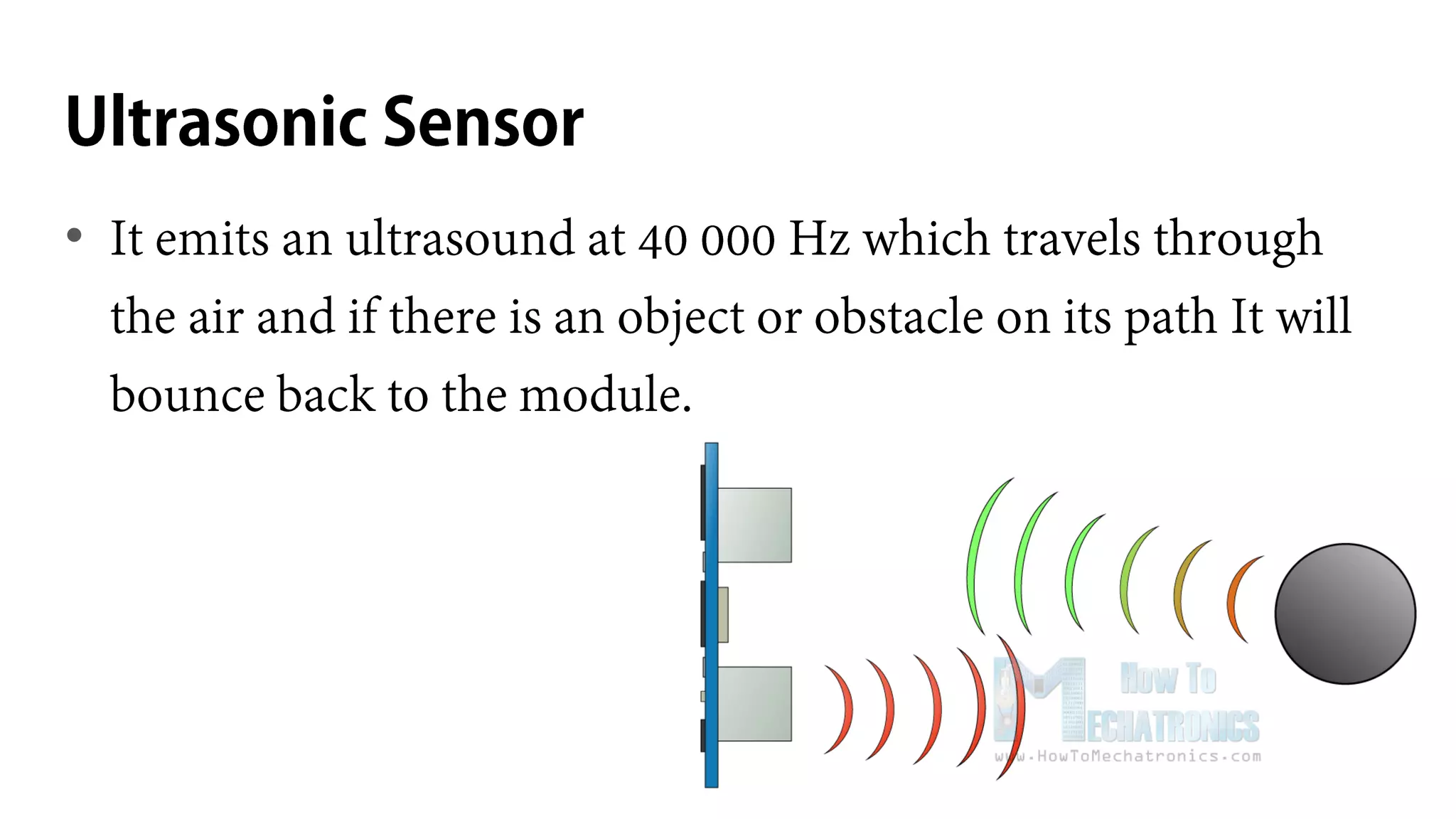
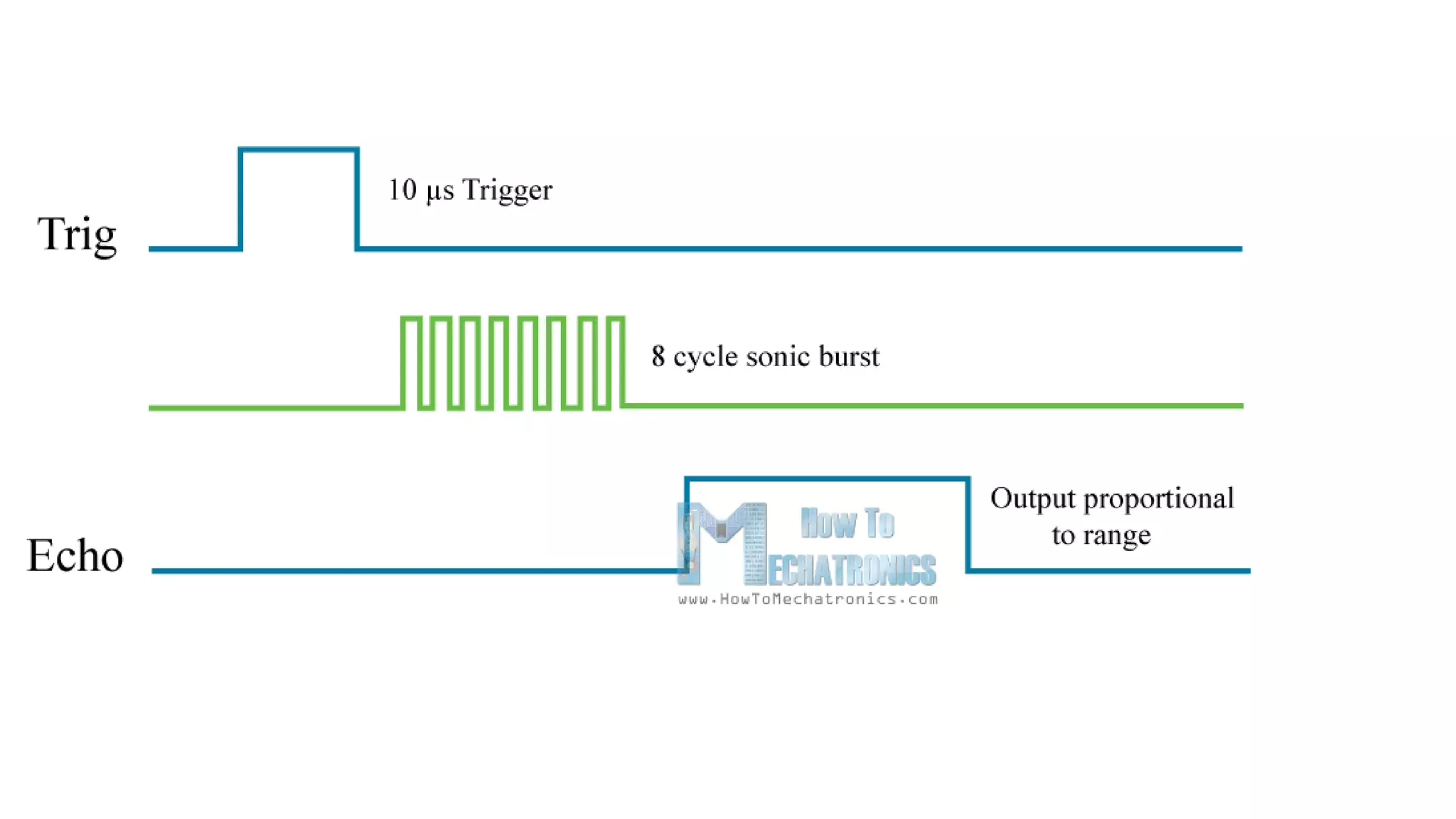
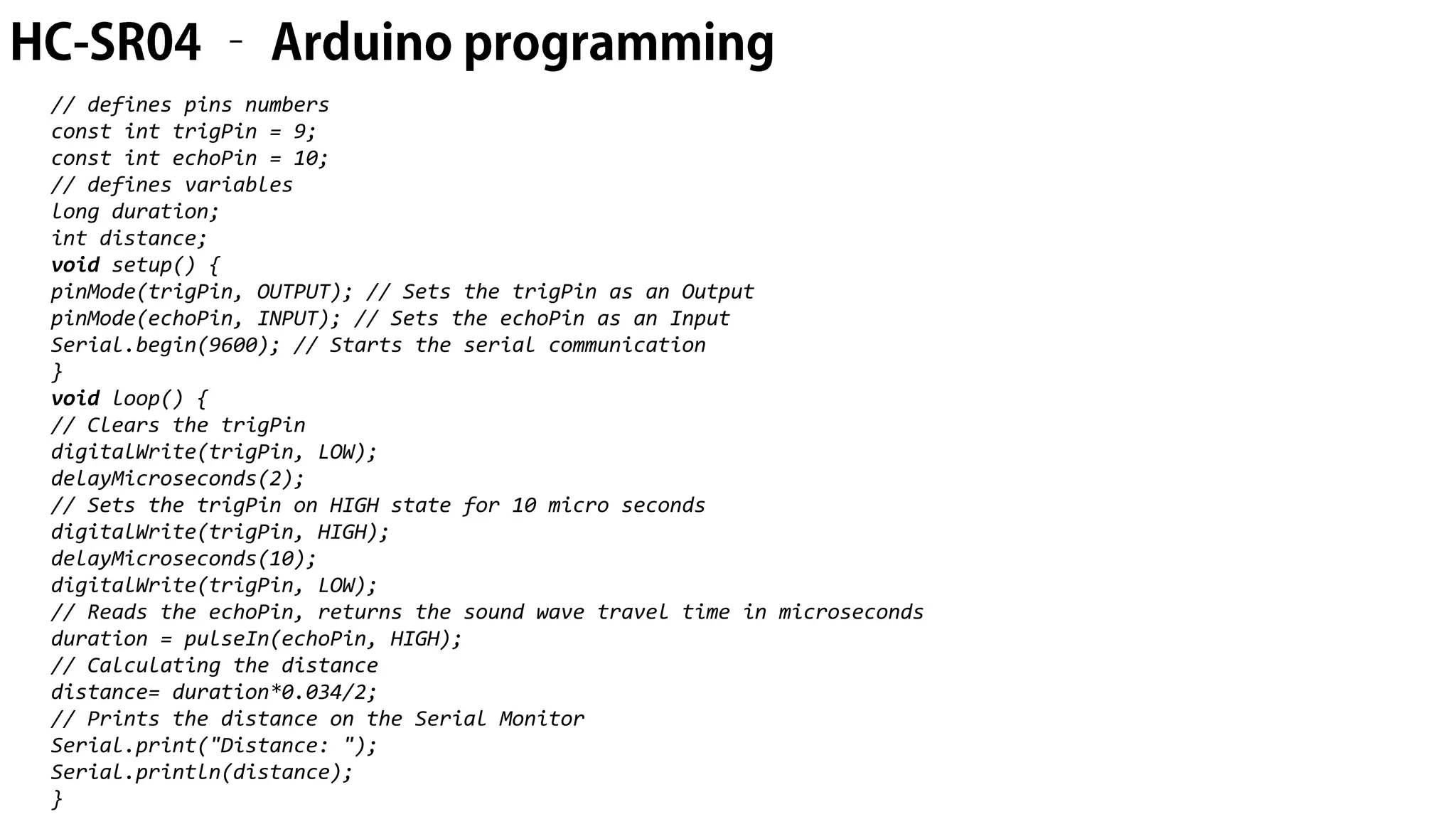
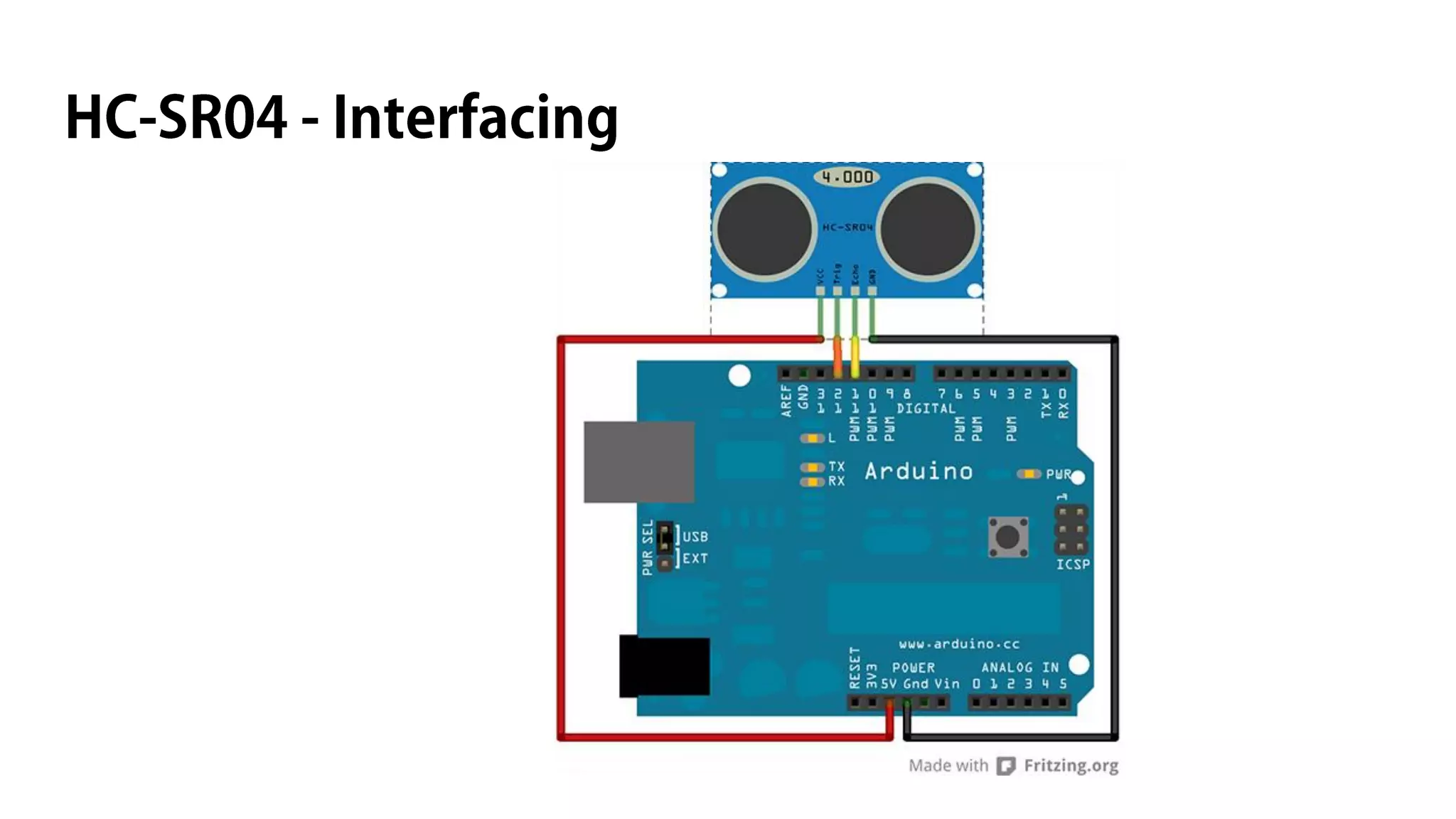
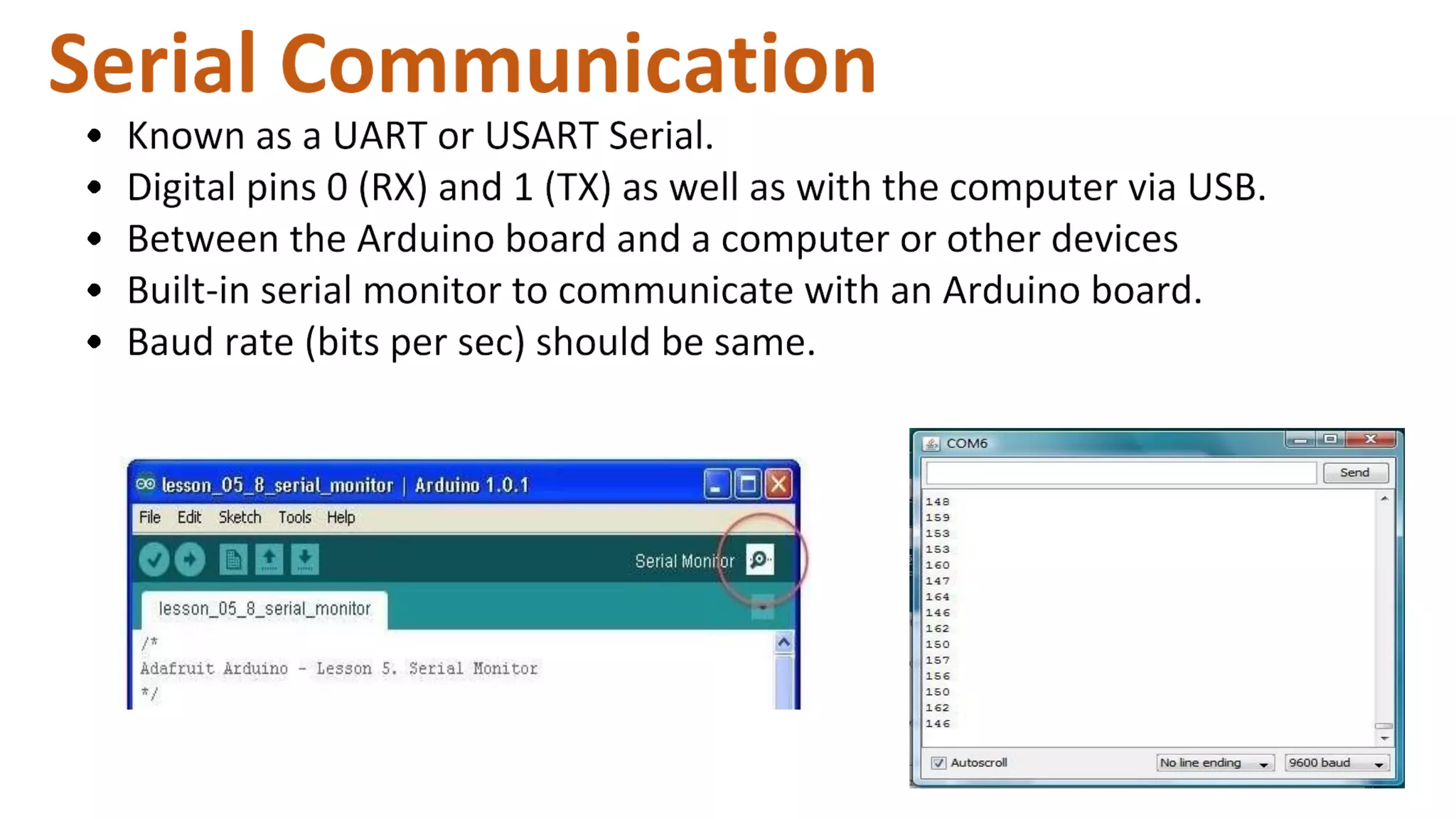
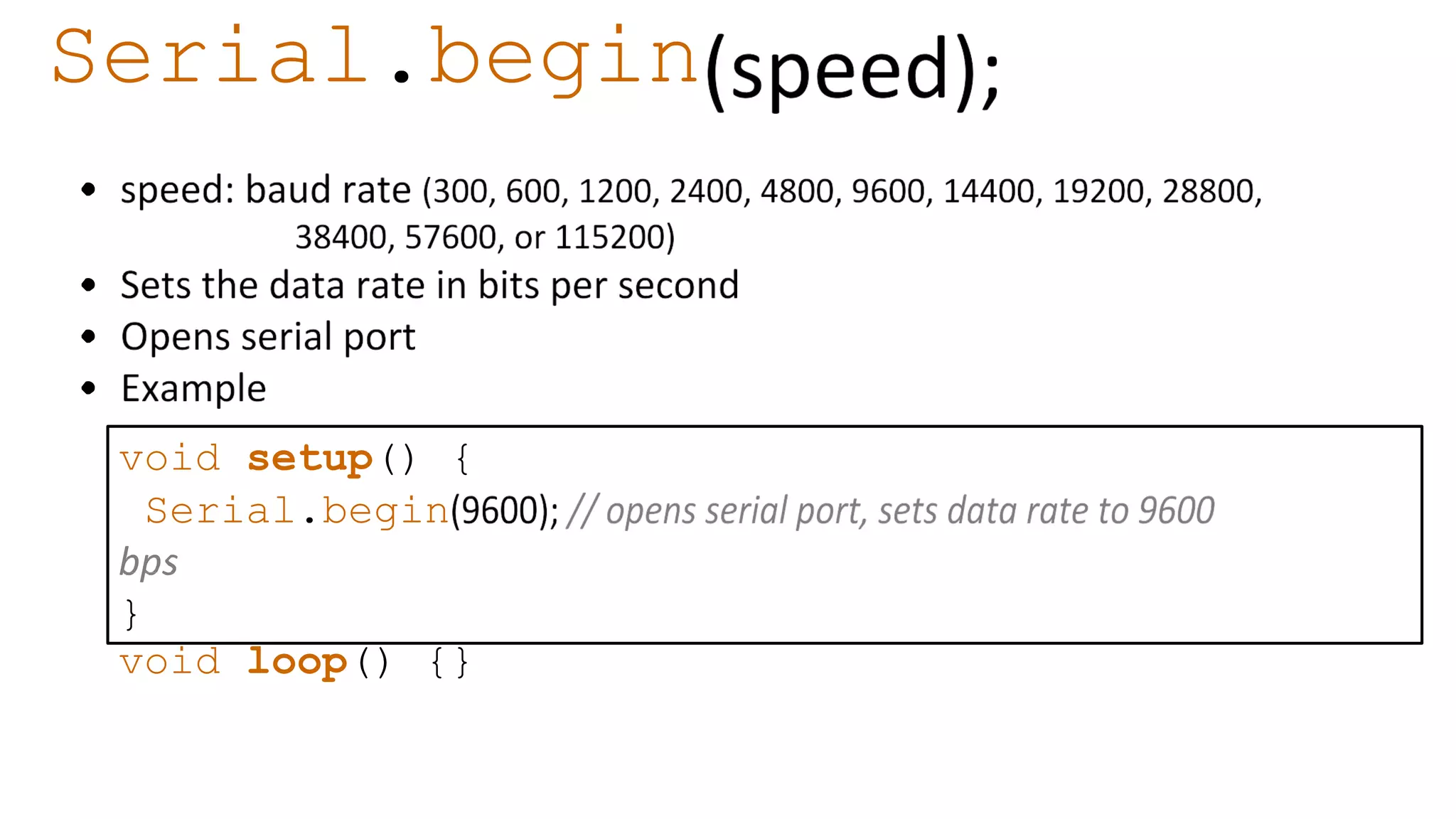
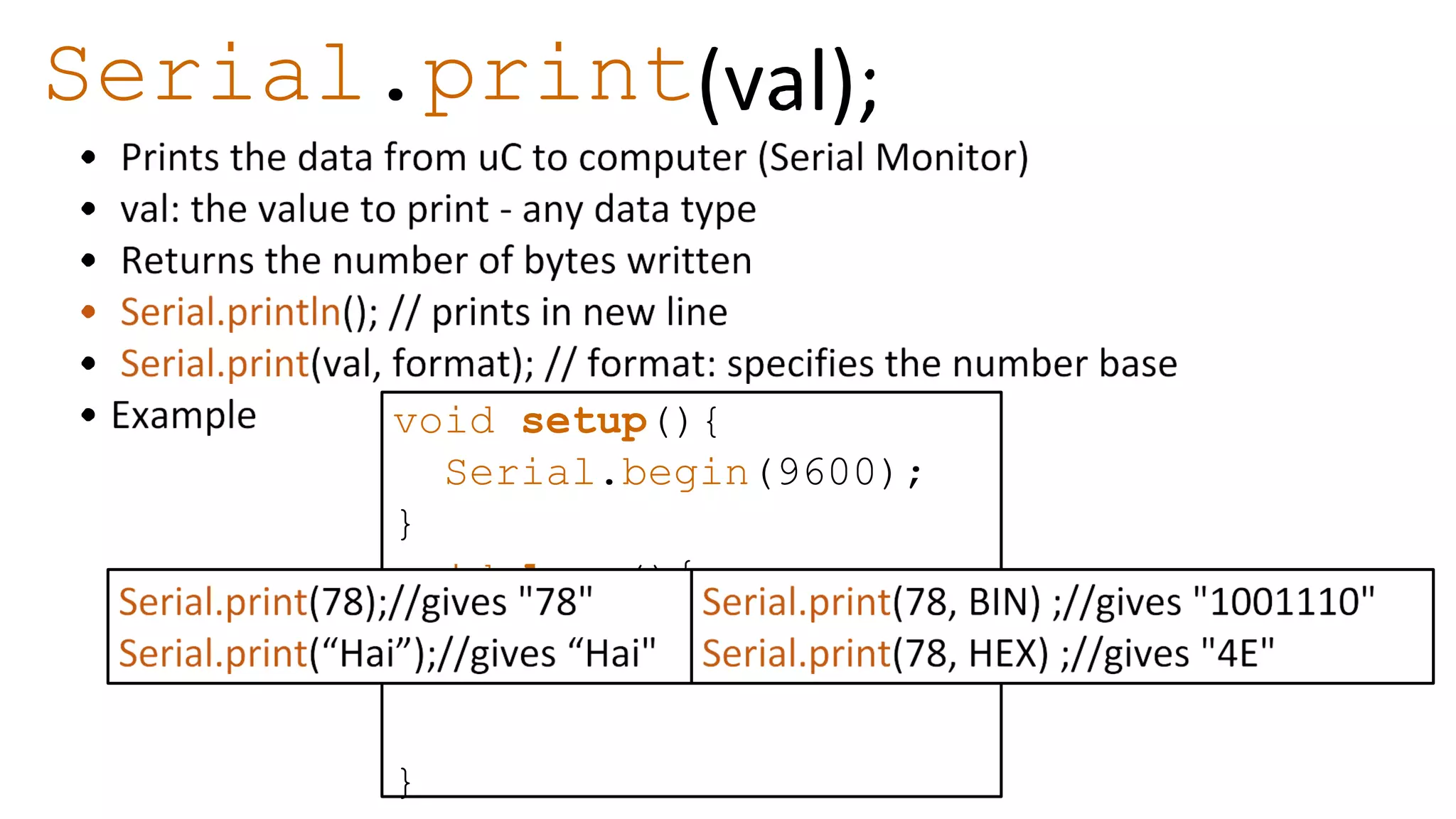
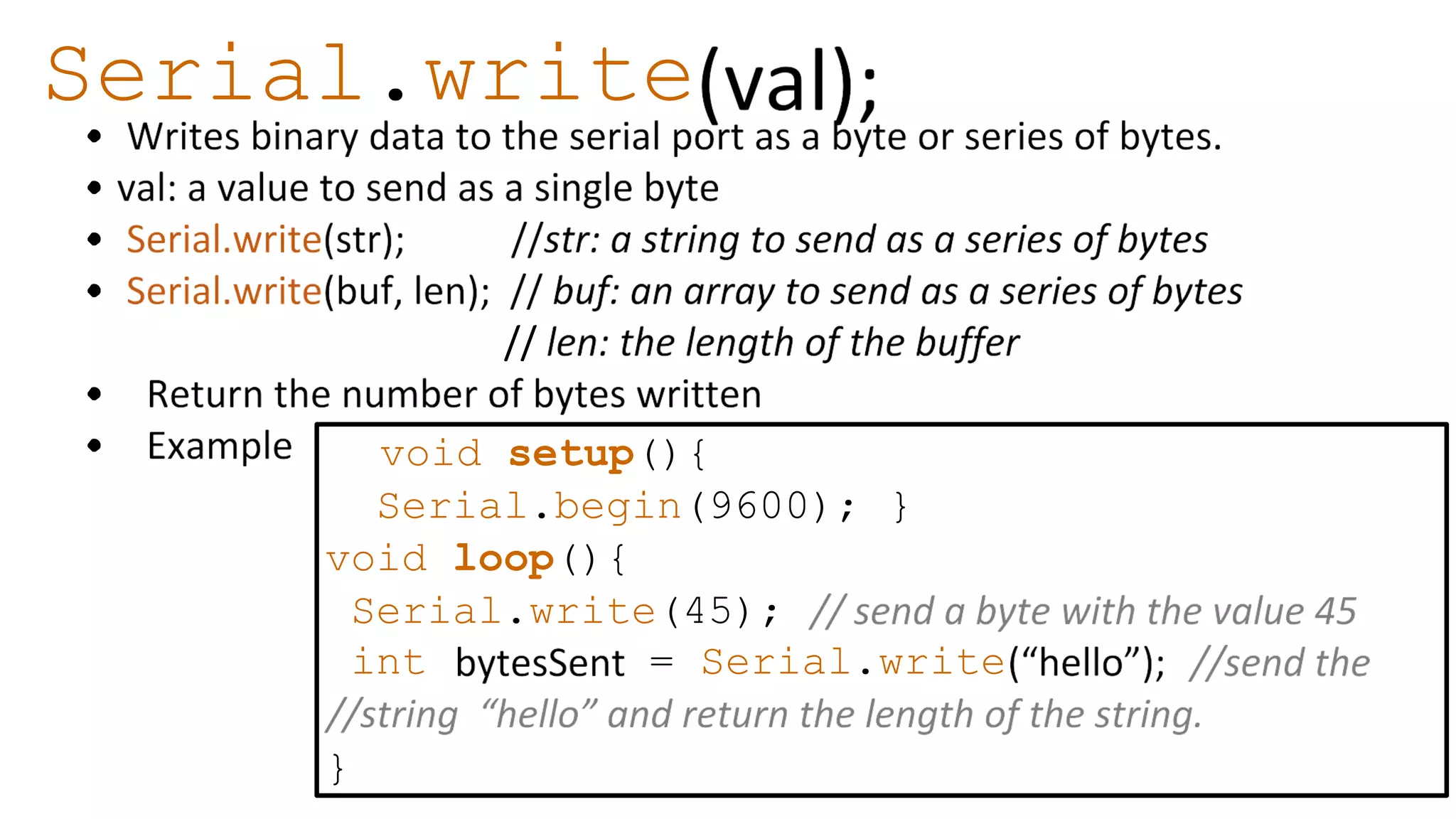
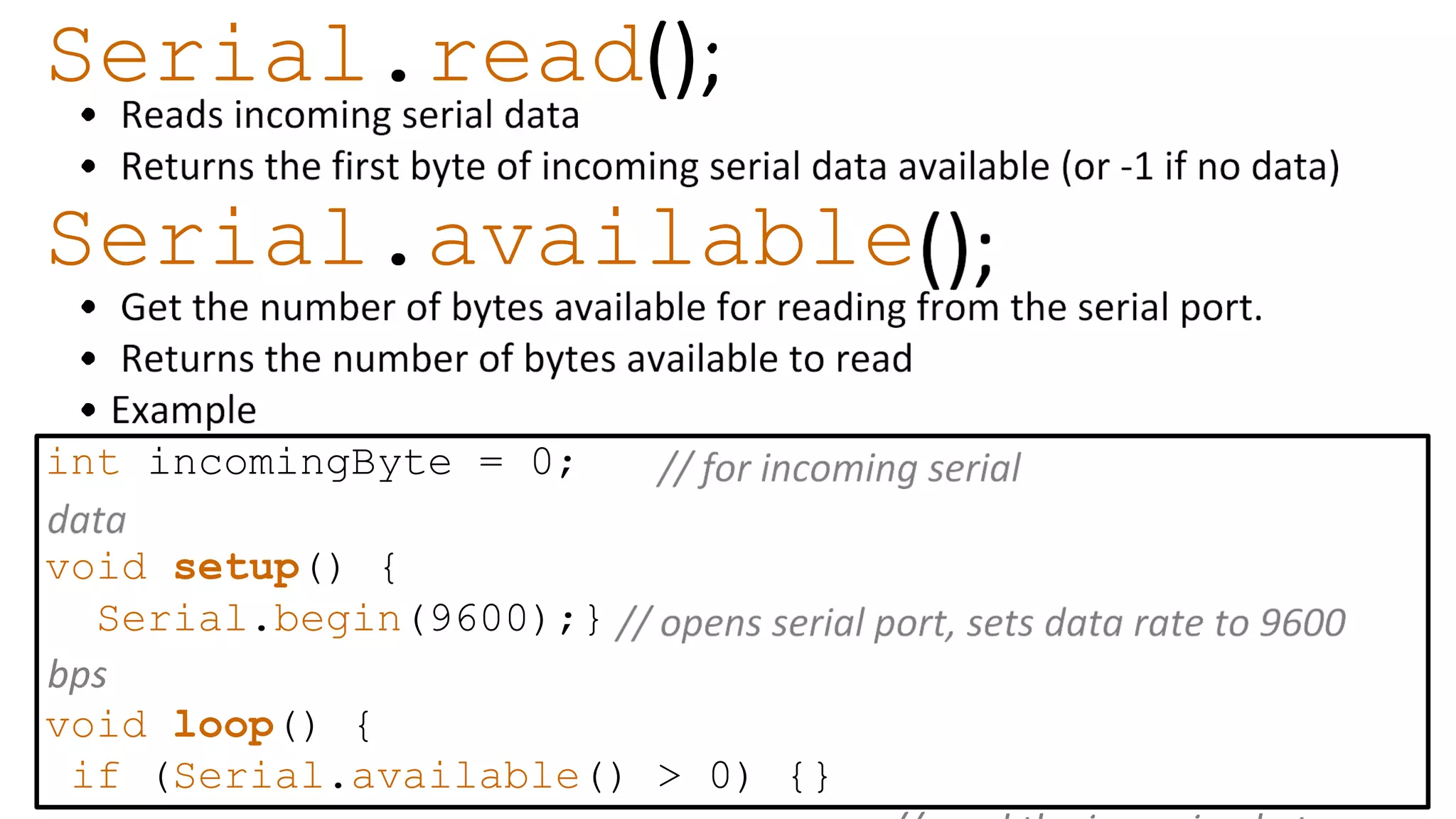

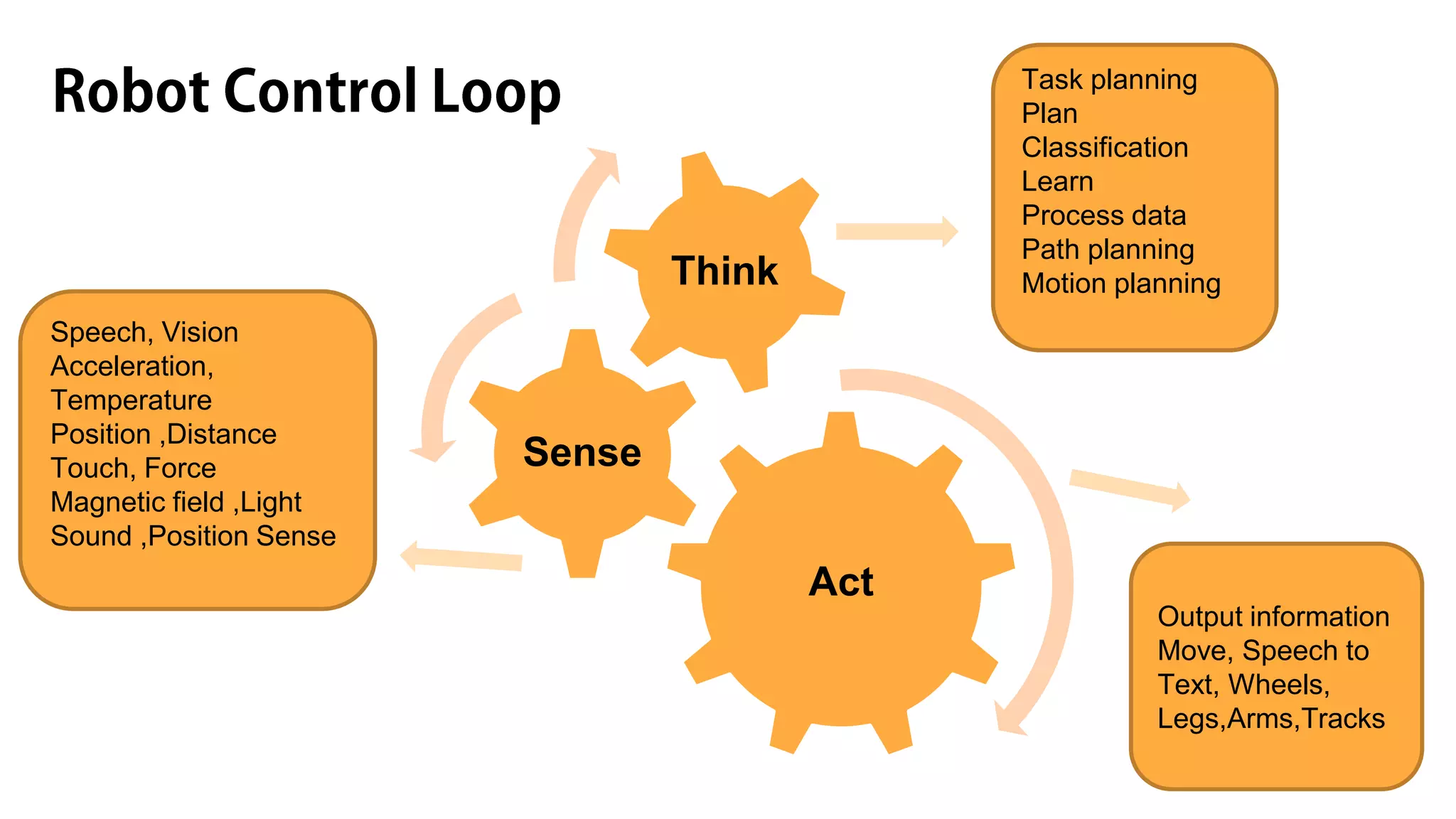





This document outlines the syllabus for an Arduino workshop that will cover basic concepts like inputs, outputs, and programming. It includes sections that explain how to use functions like pinMode(), digitalWrite(), analogRead(), and functions for using sensors like ultrasonic distance measurement. The document also covers using the Serial Monitor, LCD displays, and introduces concepts in robotics like sensing, thinking, planning and output. The overall workshop aims to teach participants how to get started with Arduino and touch on the concept of infinity through hands-on projects.