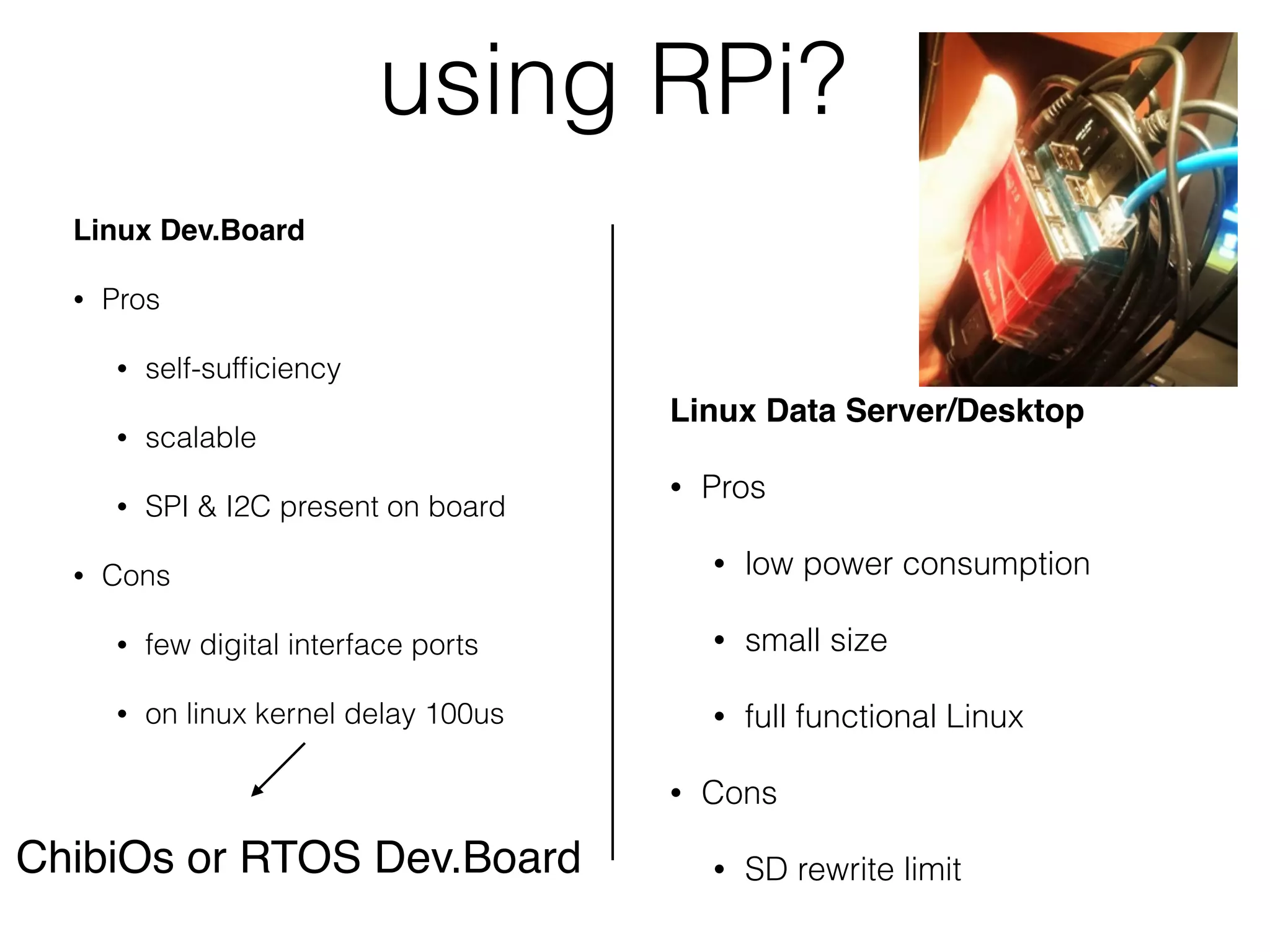
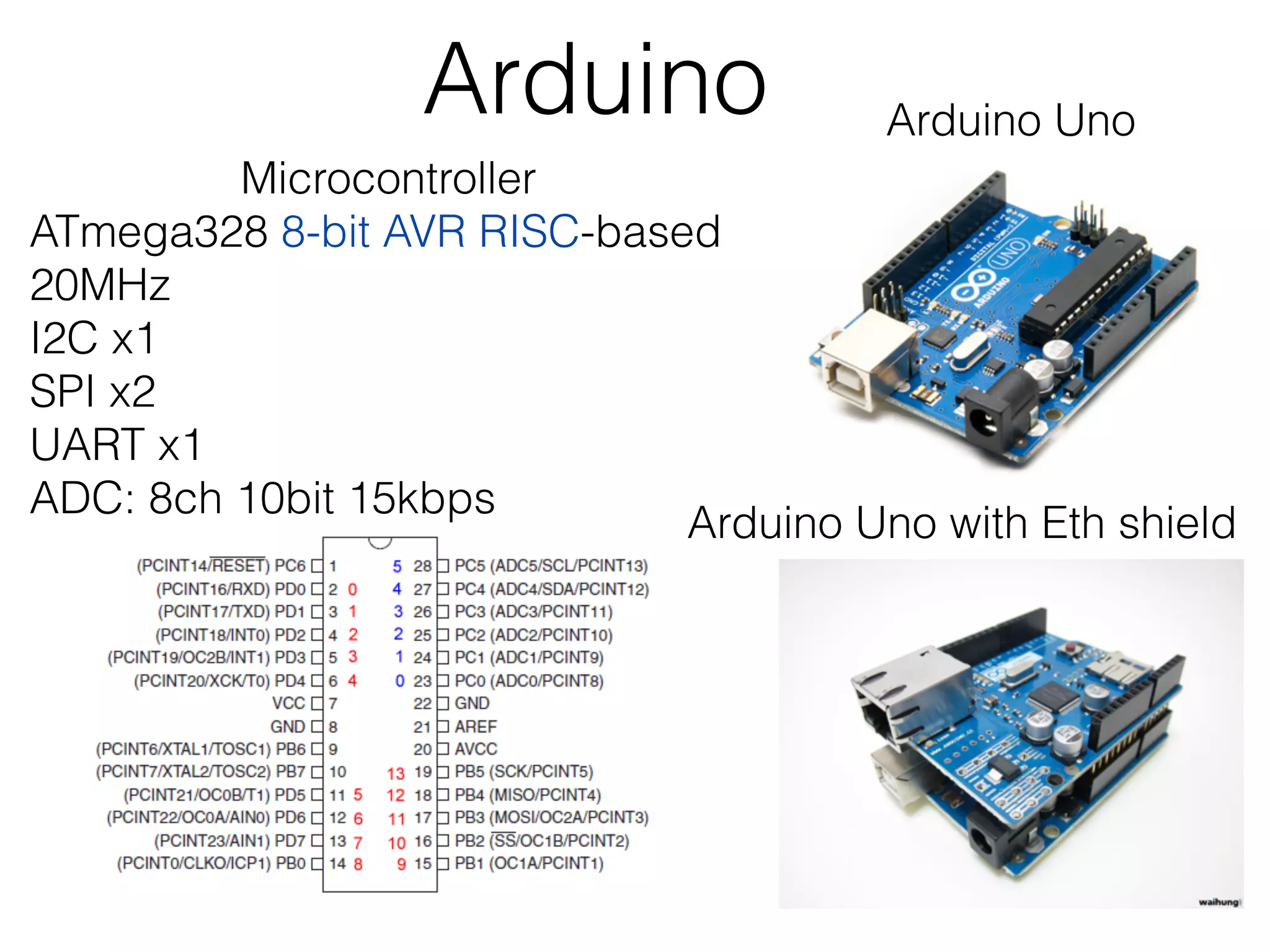
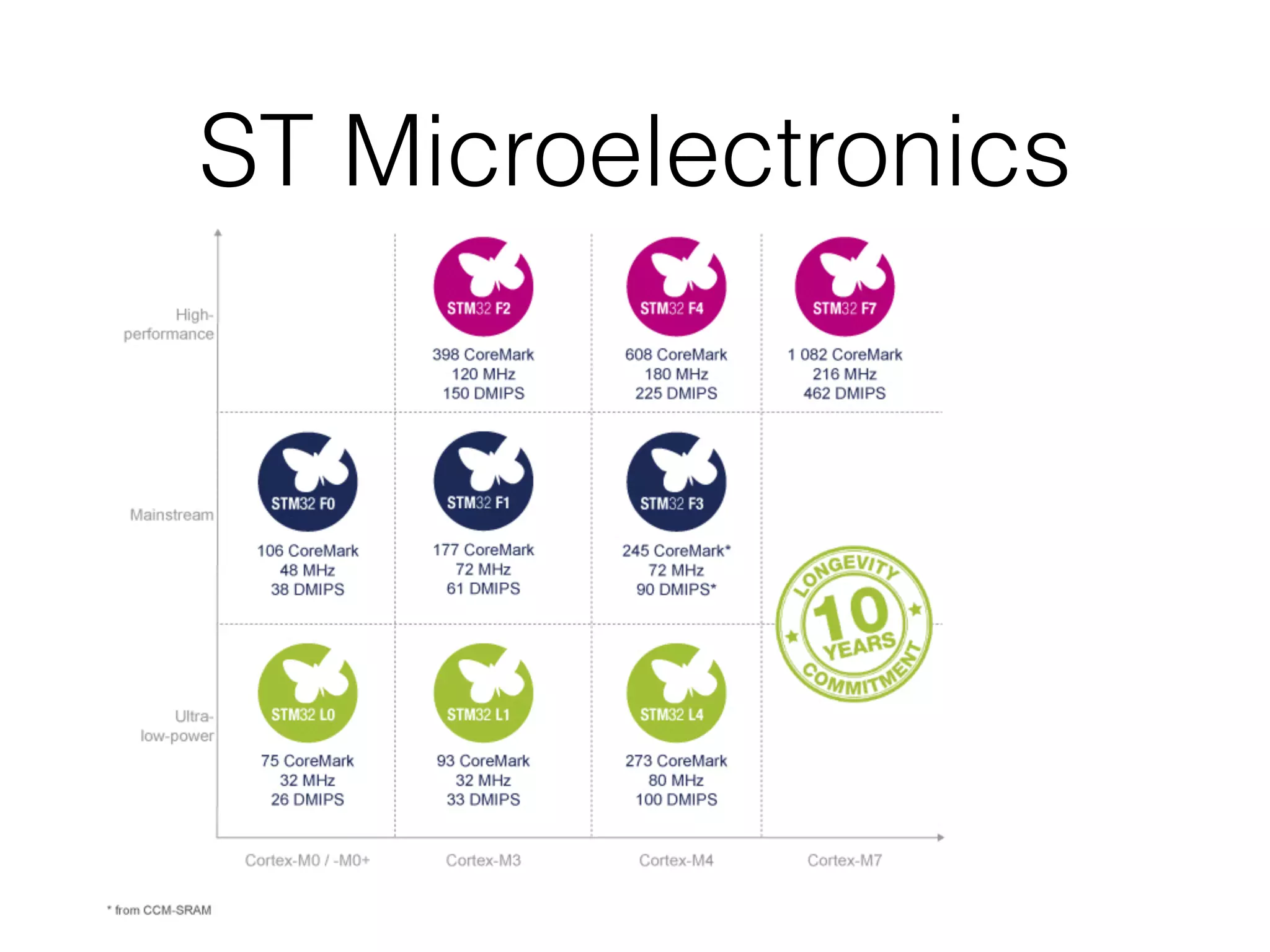
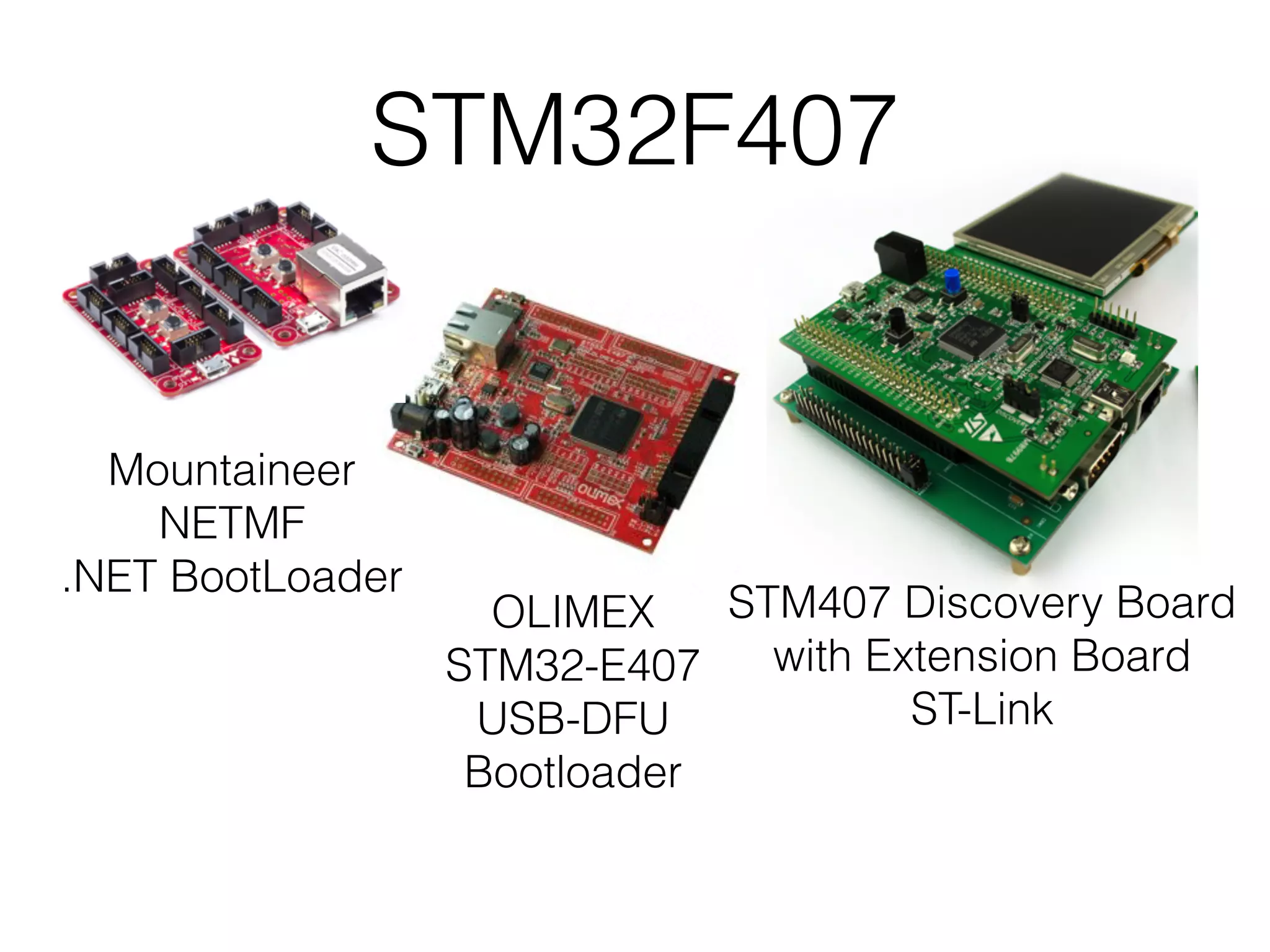
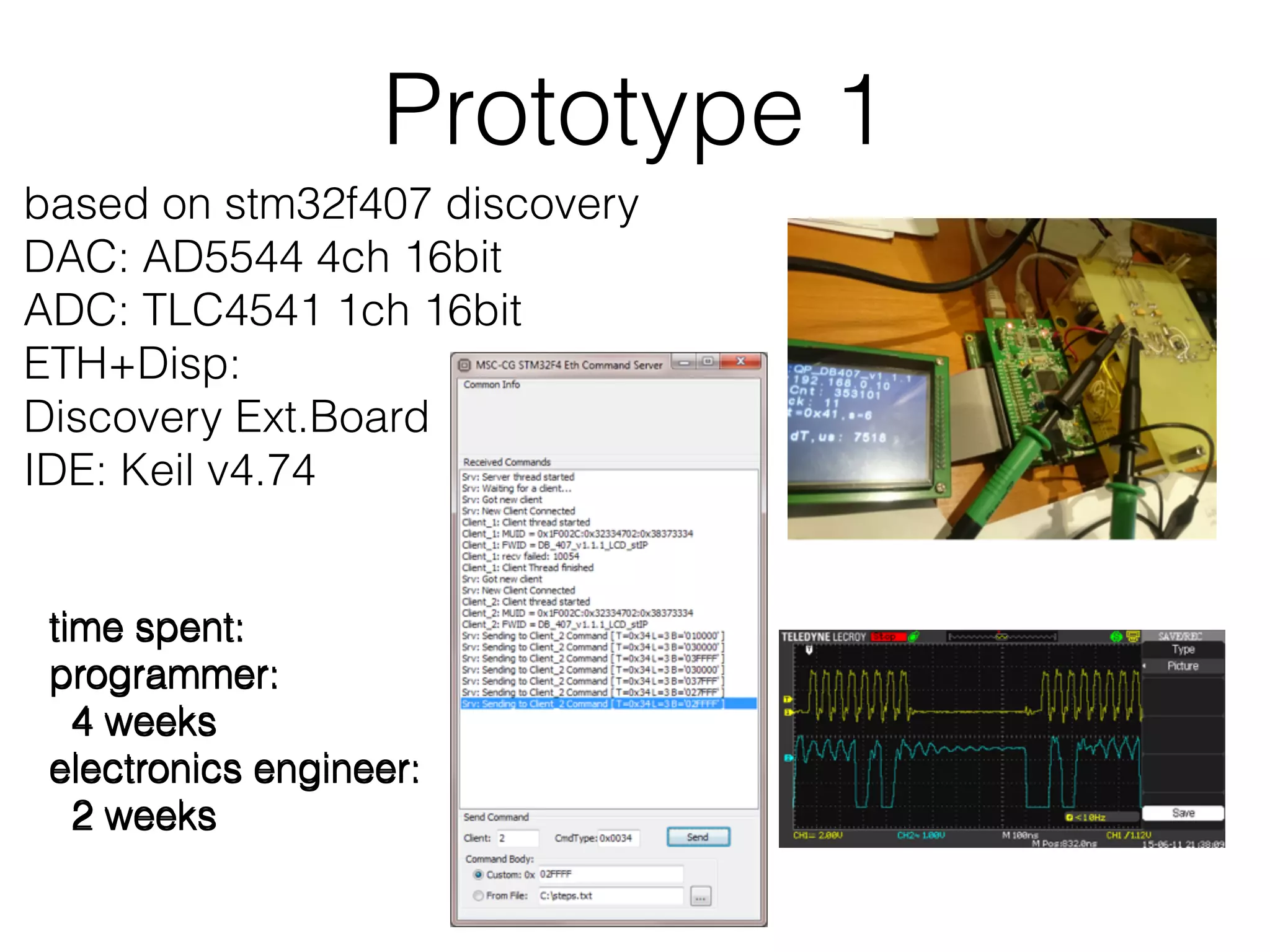
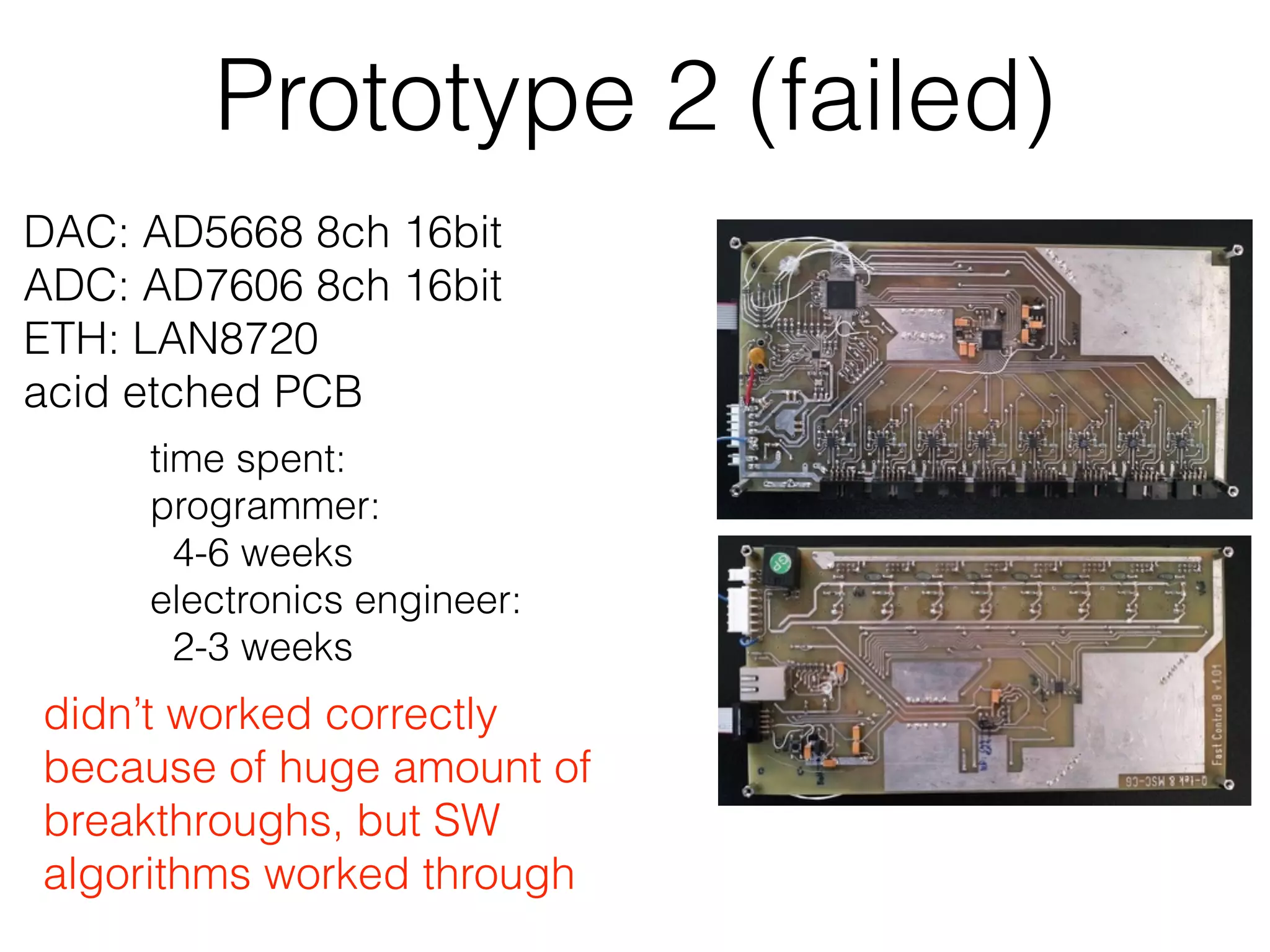
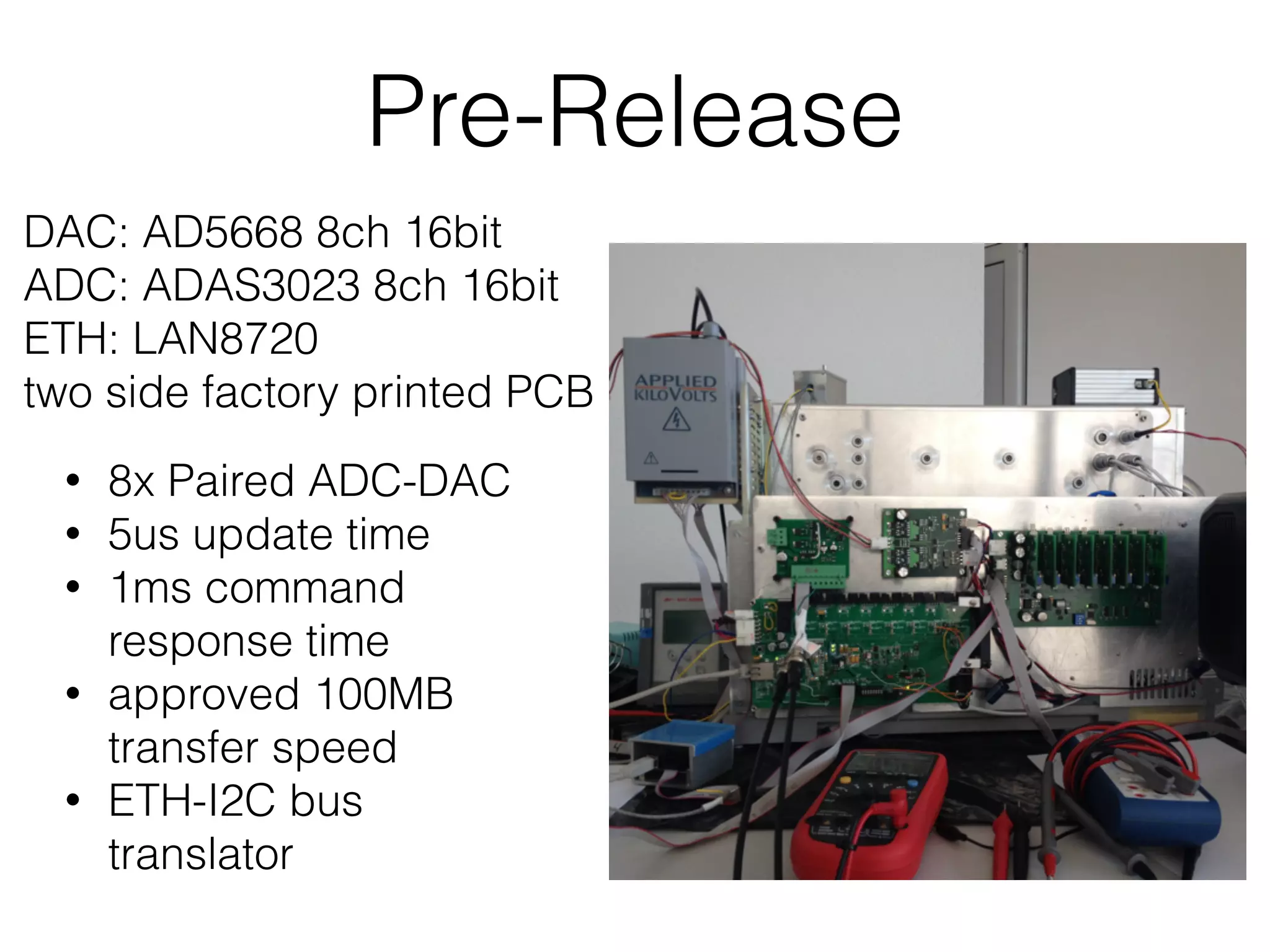
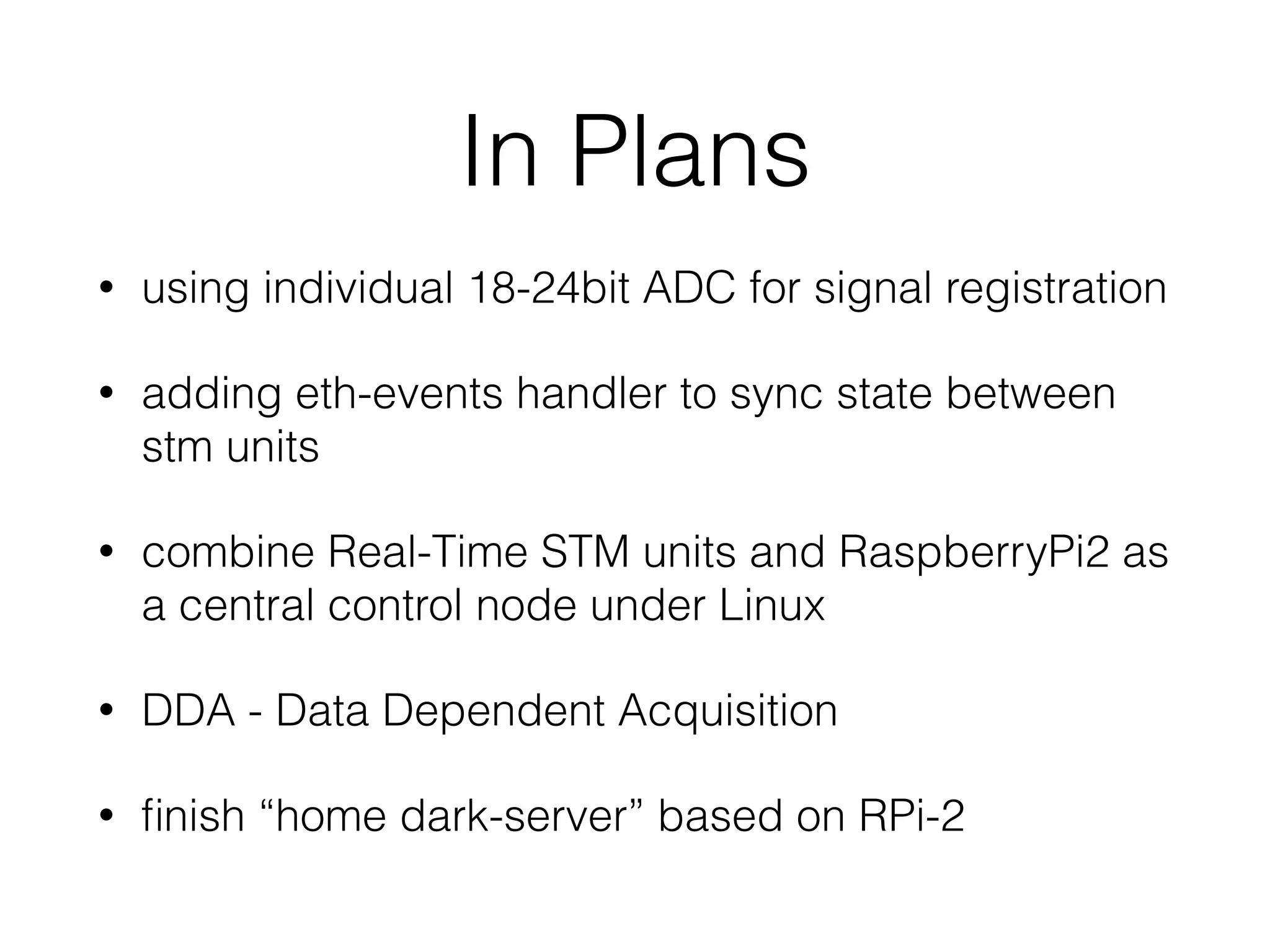
This document discusses using ARM development boards for physical experimental instruments. It provides examples of the Raspberry Pi and STM32 microcontrollers, comparing their interfaces, development environments, and use in prototypes that require high-speed digital-to-analog and analog-to-digital conversion with Ethernet connectivity. Prototypes achieved update times of 5us or less while maintaining real-time data transfer capabilities. Future plans include higher resolution converters and combining STM and Raspberry Pi units for scalable real-time control.


![Raspberry Pi code example #Python import RPi.GPIO as GPIO import time def main(): # Main program block GPIO.setmode(GPIO.BCM) # GPIO.setup(LCD_E, GPIO.OUT) # E GPIO.setup(LCD_RS, GPIO.OUT) # RS GPIO.setup(LCD_D4, GPIO.OUT) # DB4 GPIO.setup(LCD_D5, GPIO.OUT) # DB5 GPIO.setup(LCD_D6, GPIO.OUT) # DB6 GPIO.setup(LCD_D7, GPIO.OUT) # DB7 #etc… def lcd_byte(bits, mode): # Send byte to data pins # bits = data # mode = True for character # False for command GPIO.output(LCD_RS, mode) # RS # High bits GPIO.output(LCD_D4, False) GPIO.output(LCD_D5, False) GPIO.output(LCD_D6, False) GPIO.output(LCD_D7, False) #etc… //C int mcp3008Spi::spiOpen(std::string devspi){ int statusVal = -1; this->spifd = open(devspi.c_str(), O_RDWR); if(this->spifd < 0){ perror("could not open SPI device"); exit(1); } statusVal = ioctl (this->spifd, SPI_IOC_WR_MODE, &(this->mode)); if(statusVal < 0){ perror("Could not set SPIMode (WR)...ioctl fail"); exit(1); } //etc… // Transfer data with SPI: one spi transfer for each byte for (i = 0 ; i < length ; i++){ spi[i].tx_buf = (unsigned long)(data + i); // transmit from "data" spi[i].rx_buf = (unsigned long)(data + i) ; // receive into "data" spi[i].len = sizeof(*(data + i)) ; spi[i].delay_usecs = 0 ; spi[i].speed_hz = this->speed ; spi[i].bits_per_word = this->bitsPerWord ; spi[i].cs_change = 0; } retVal = ioctl (this->spifd, SPI_IOC_MESSAGE(length), &spi) ;](https://image.slidesharecdn.com/armdevboardspdf-150712083313-lva1-app6892/75/Using-ARM-Dev-Board-in-physical-experimental-instruments-11-2048.jpg)