Download to read offline
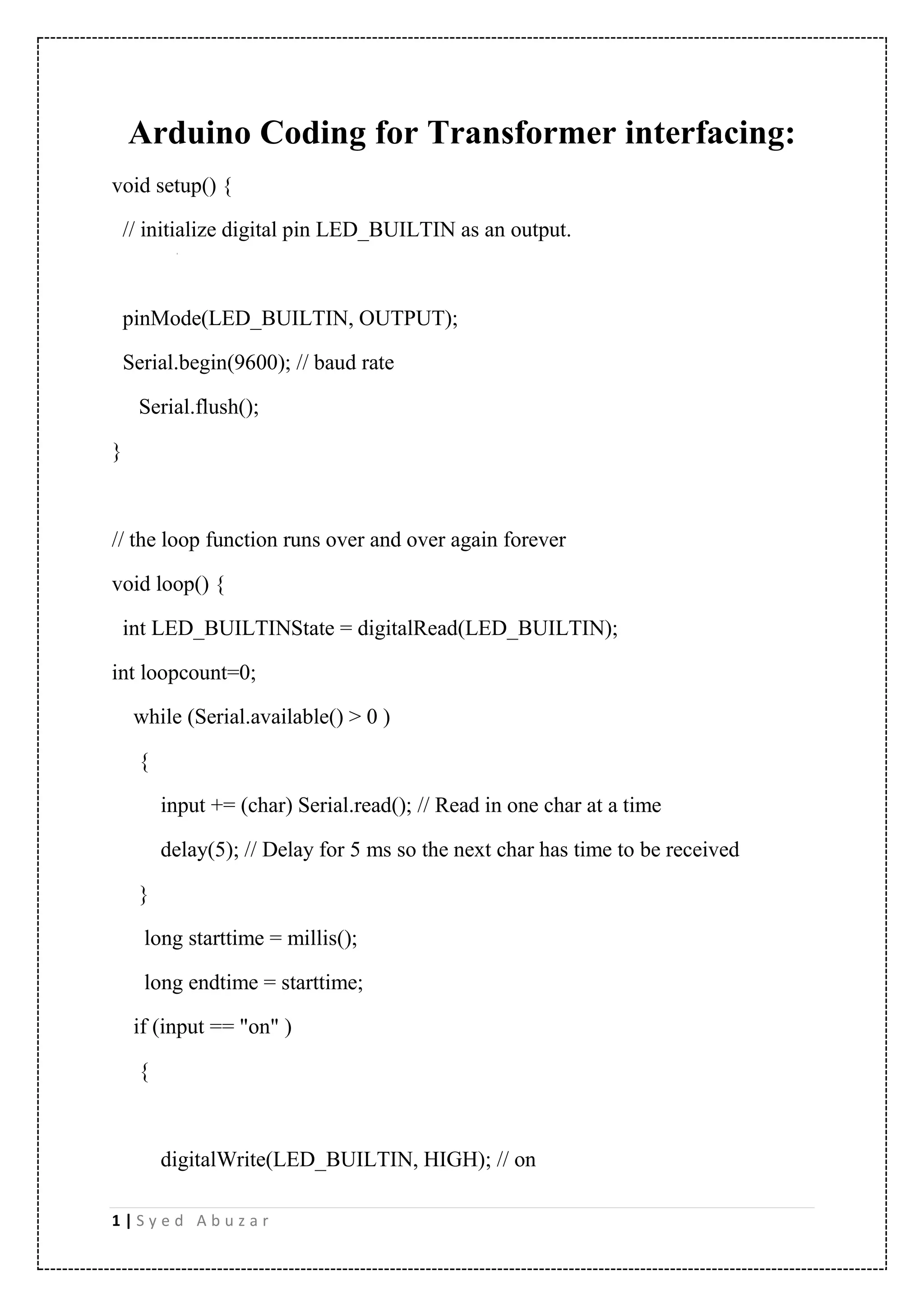
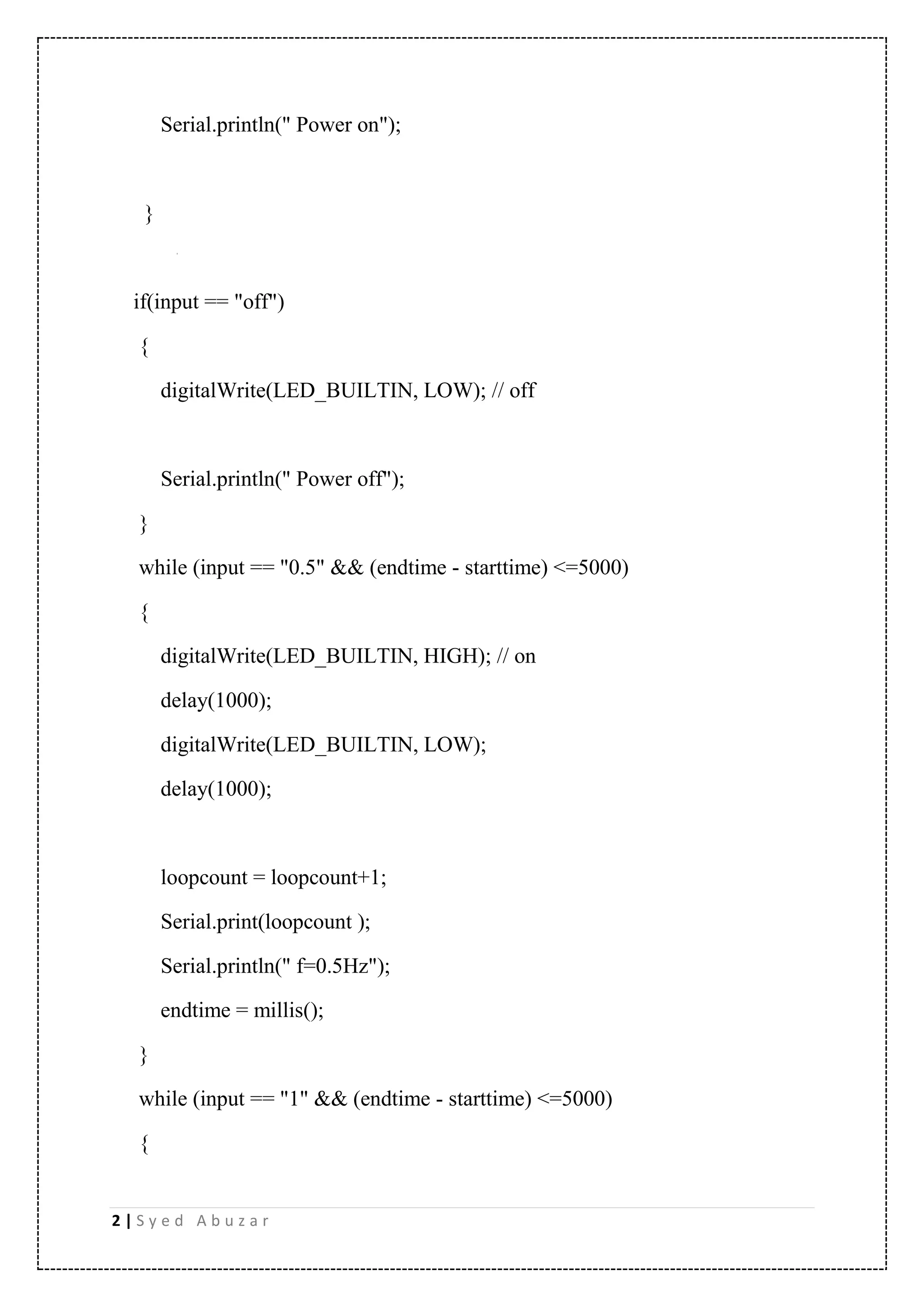
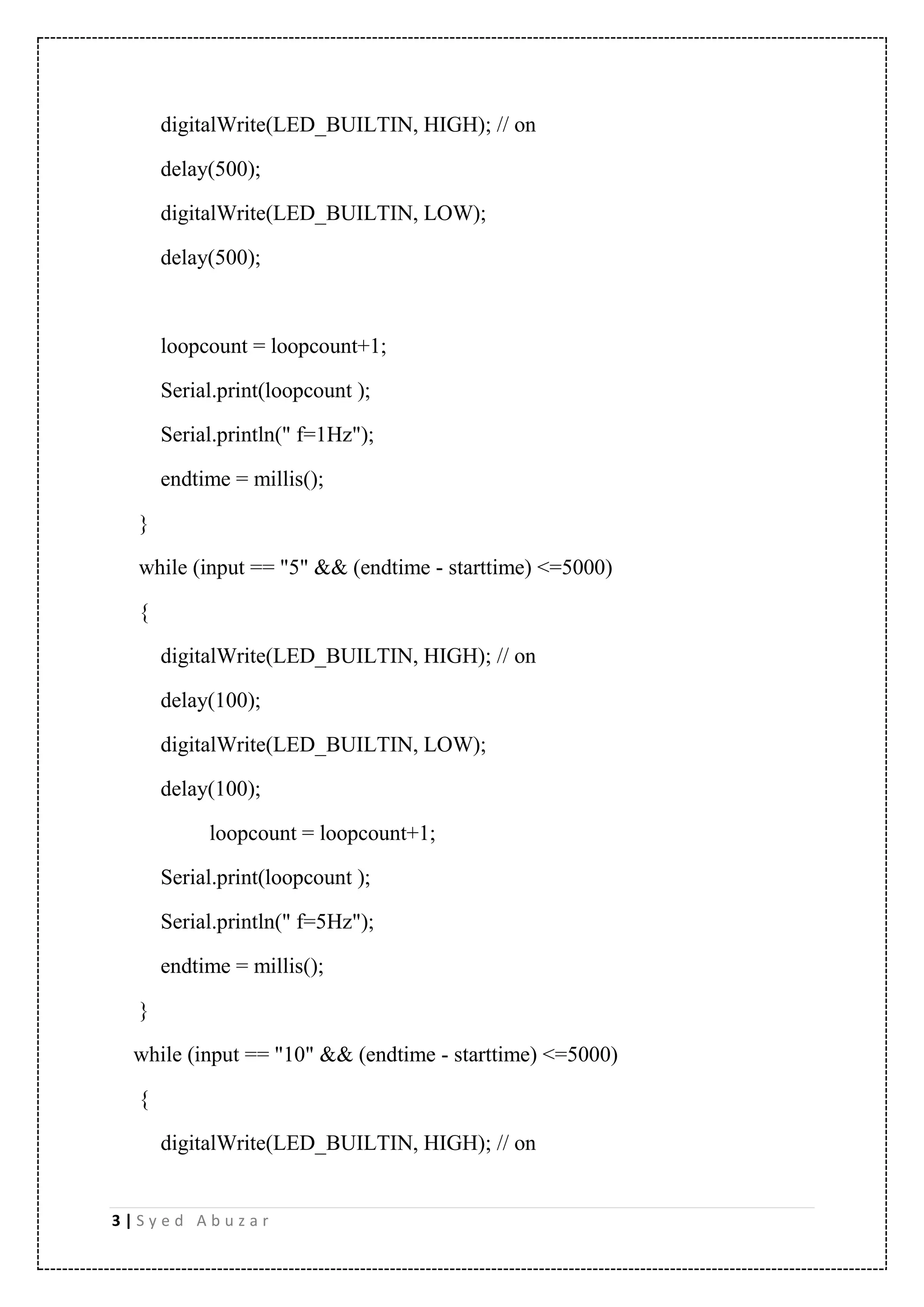
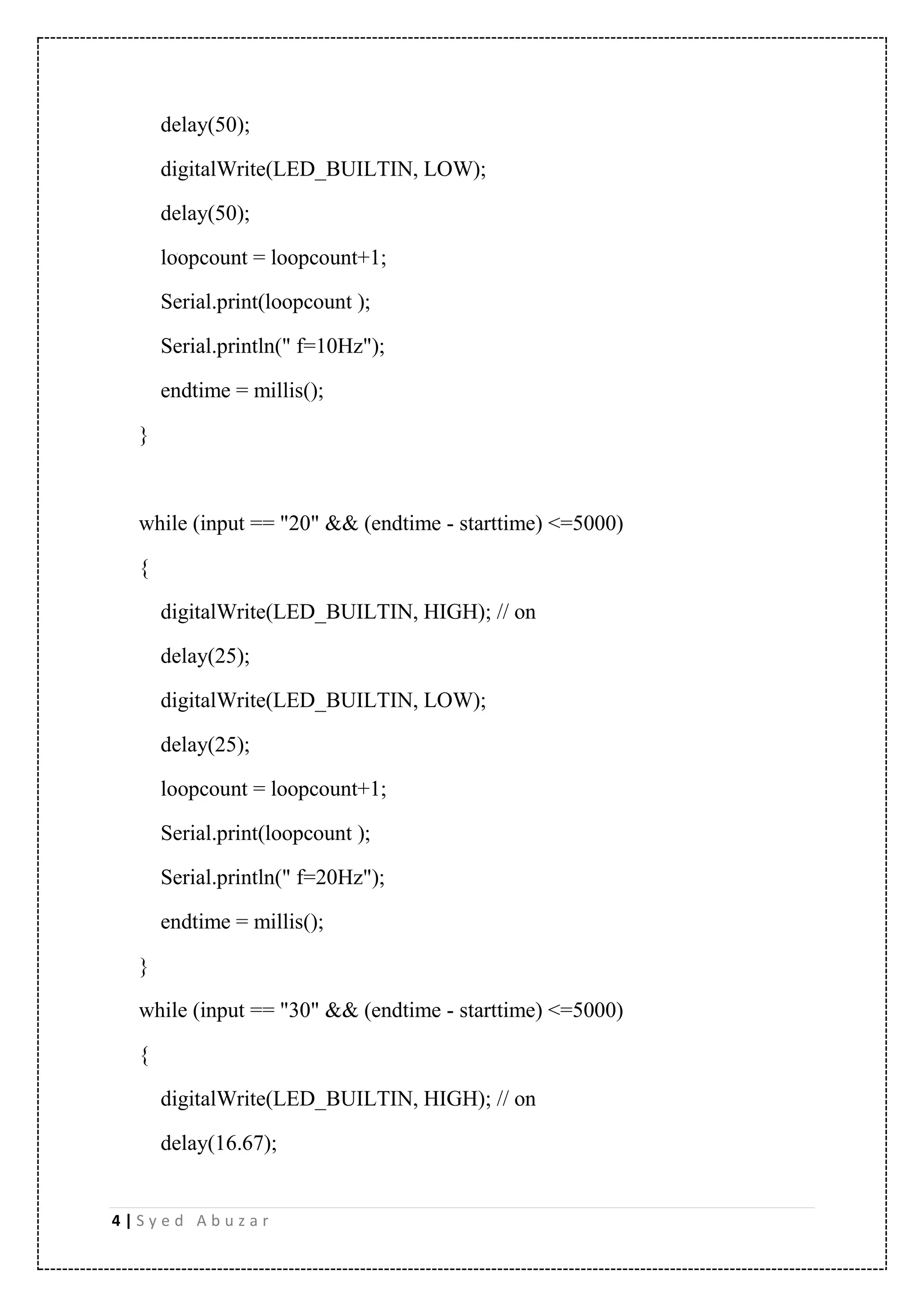
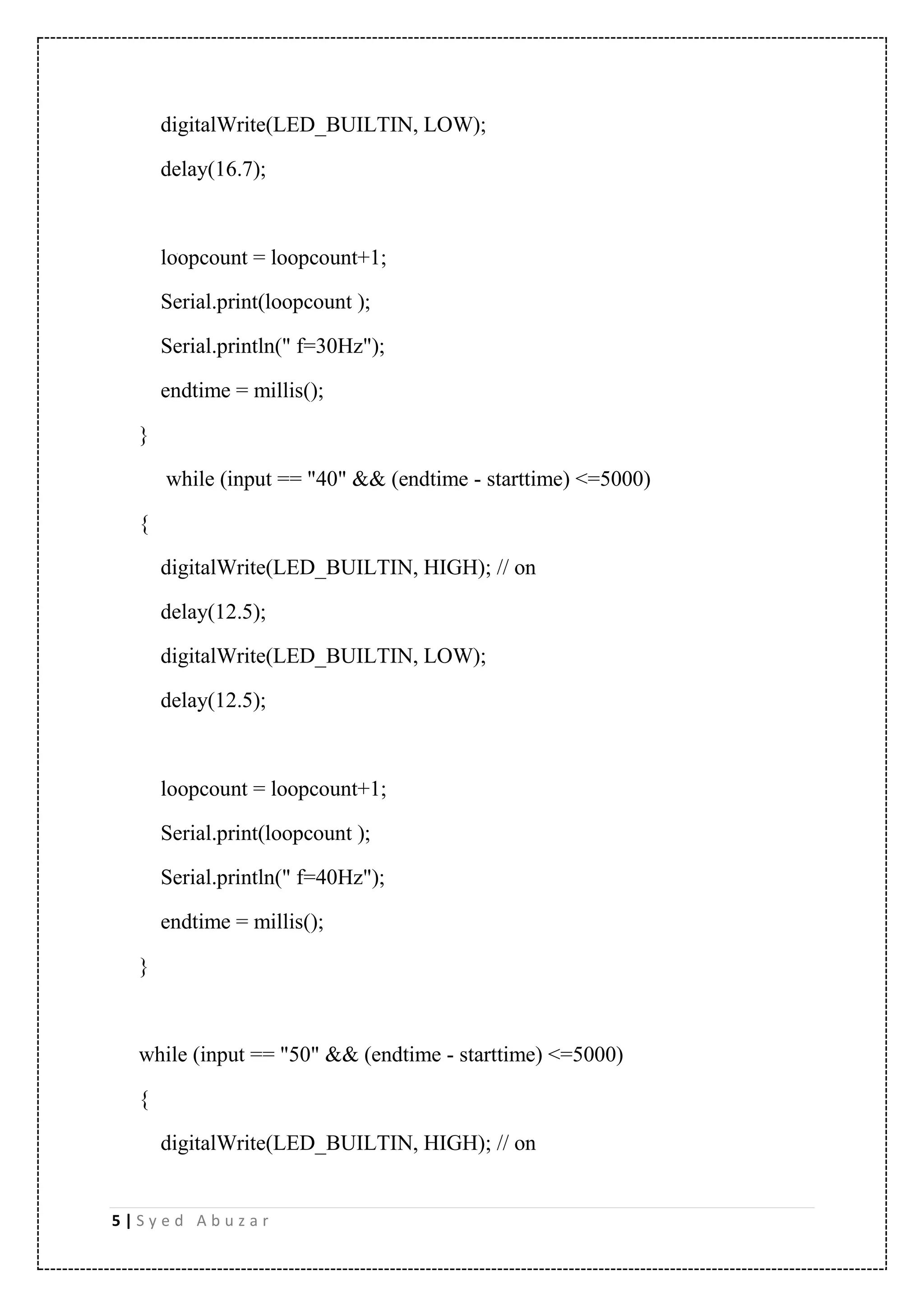
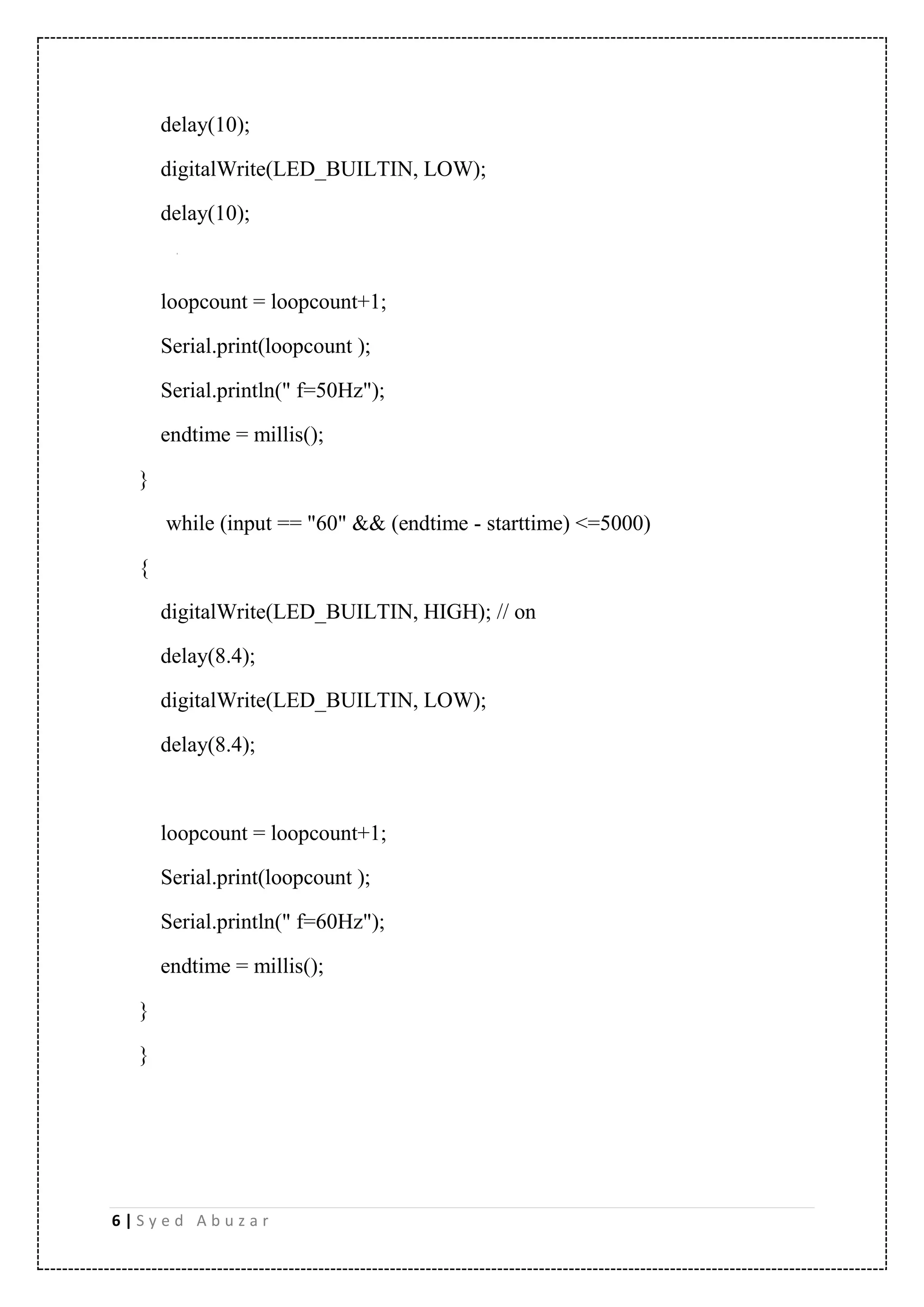

This Arduino code controls an LED by interfacing with a transformer. It defines setup and loop functions to initialize the LED pin as output and read serial input. Based on the serial input of "on", "off", or a number between 0.5-60, it will turn the LED on/off or blink it at the corresponding frequency for 5 seconds, printing the loop count and frequency to the serial monitor.