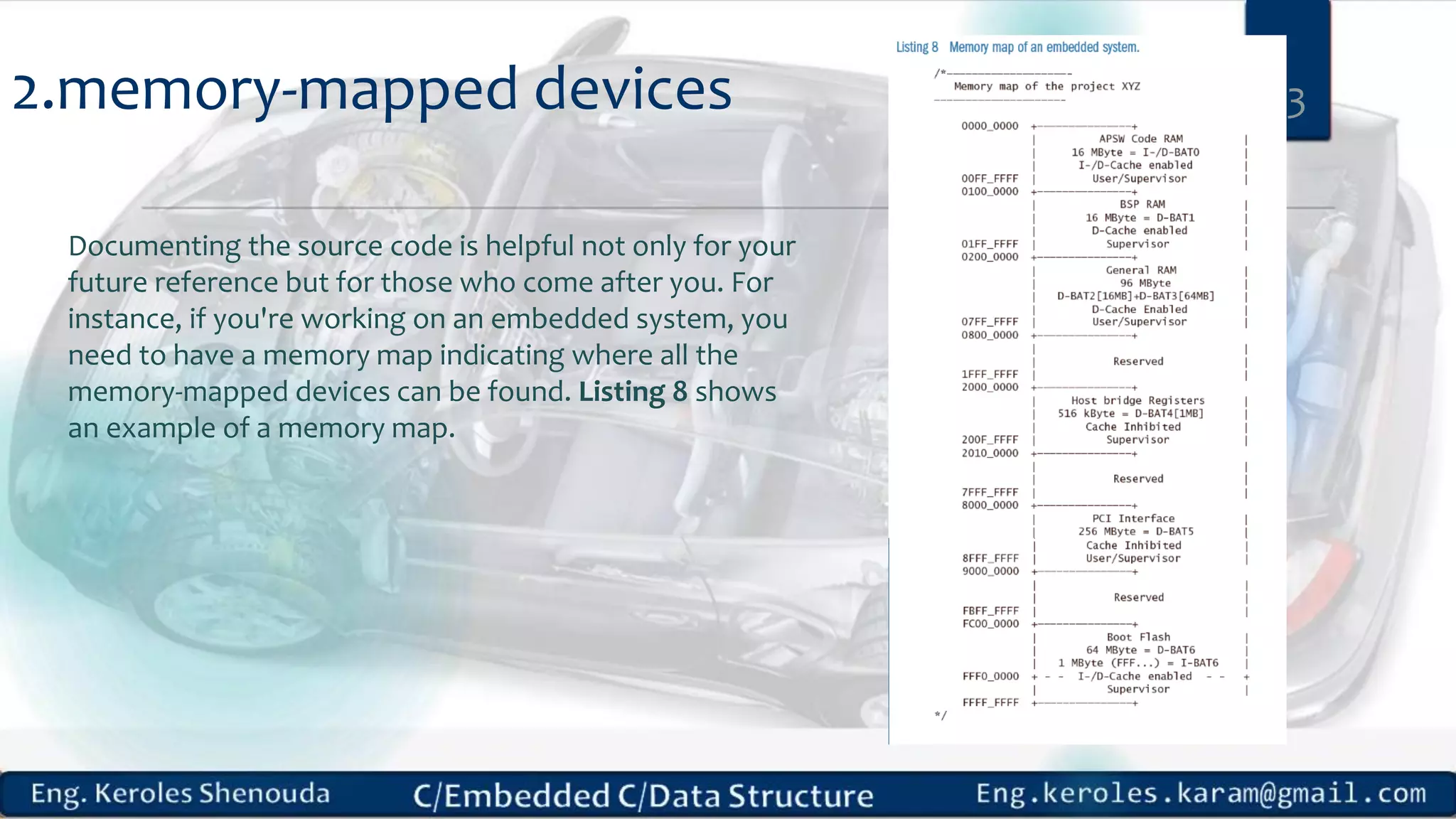
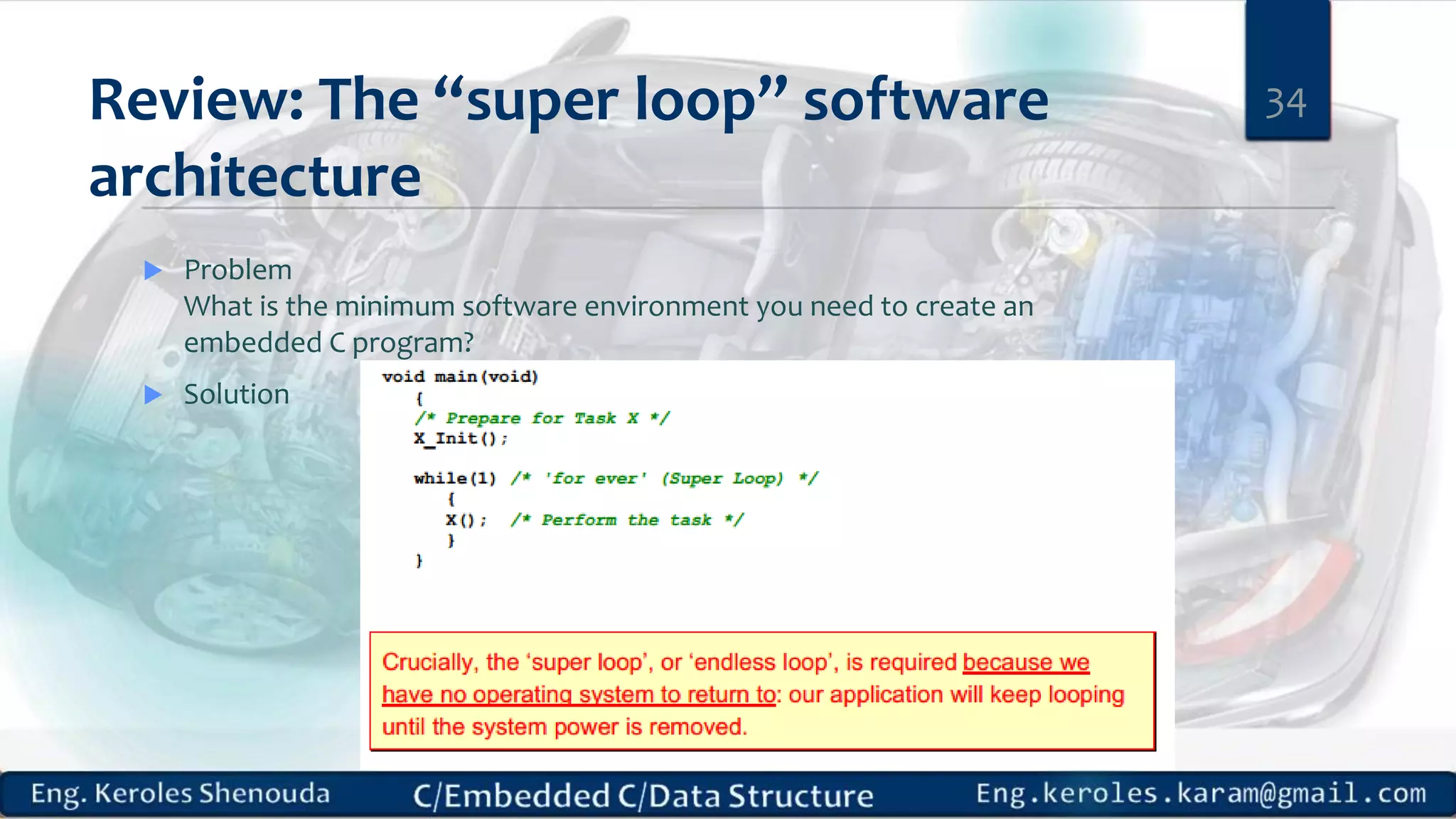
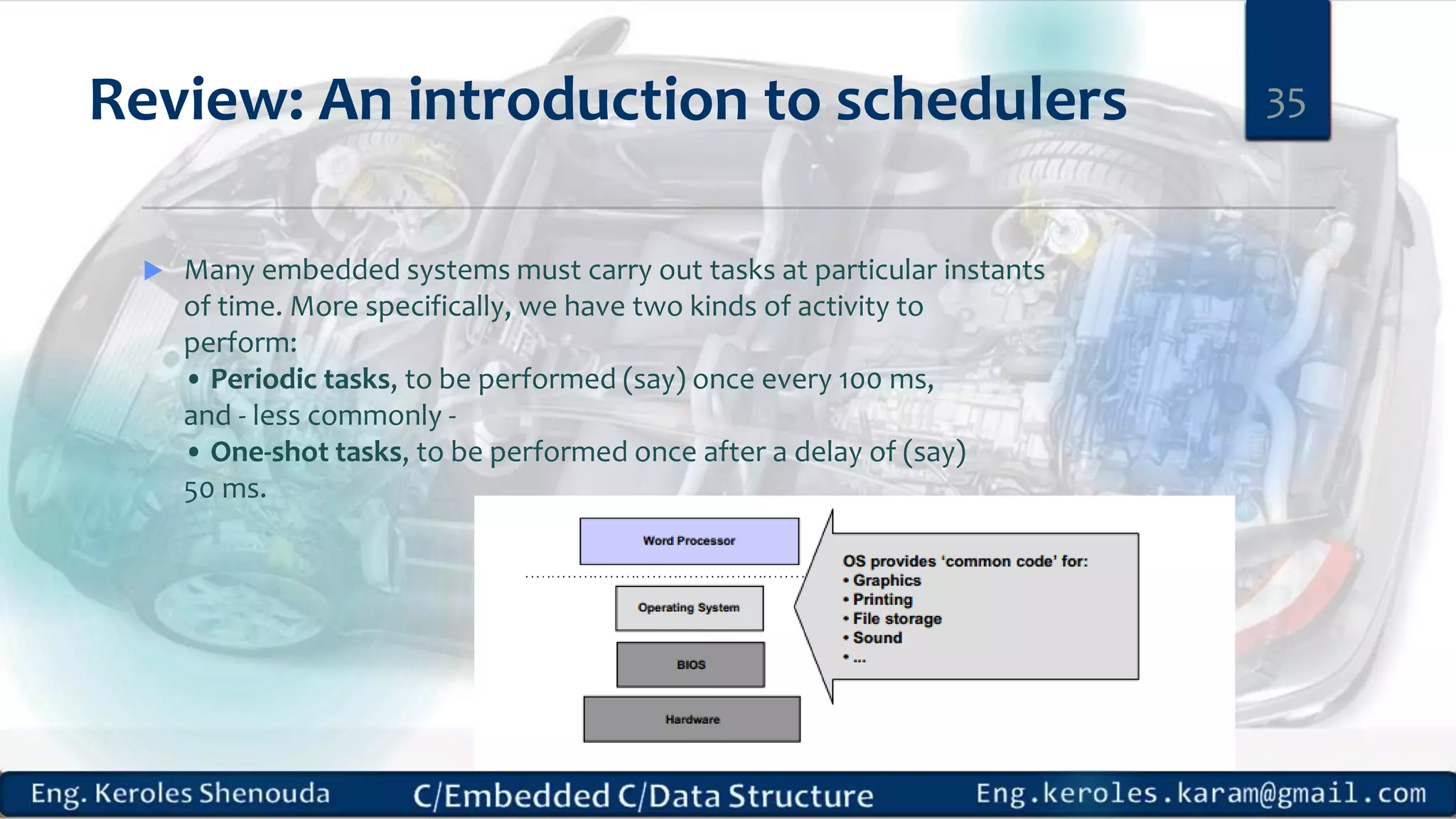
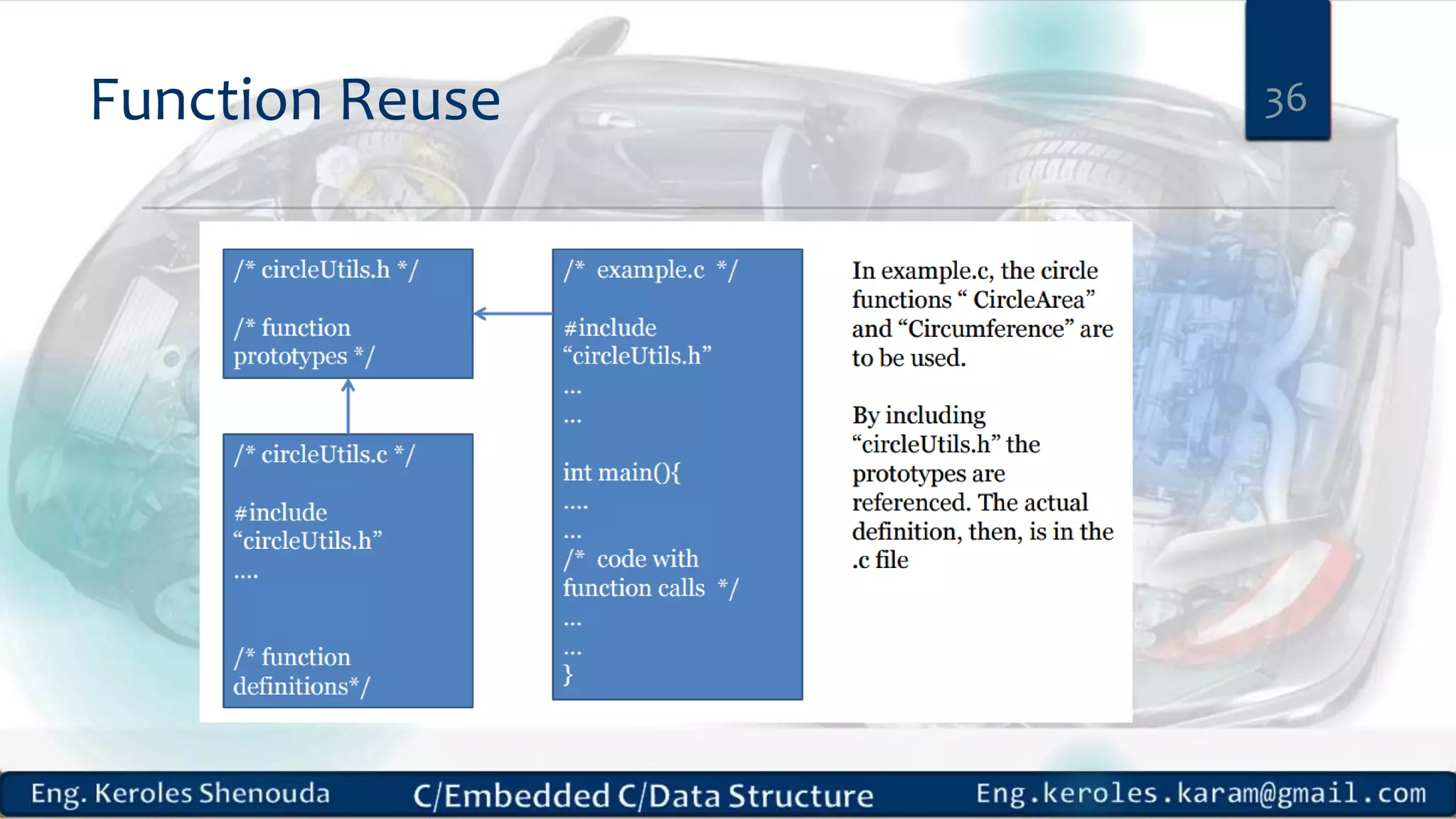
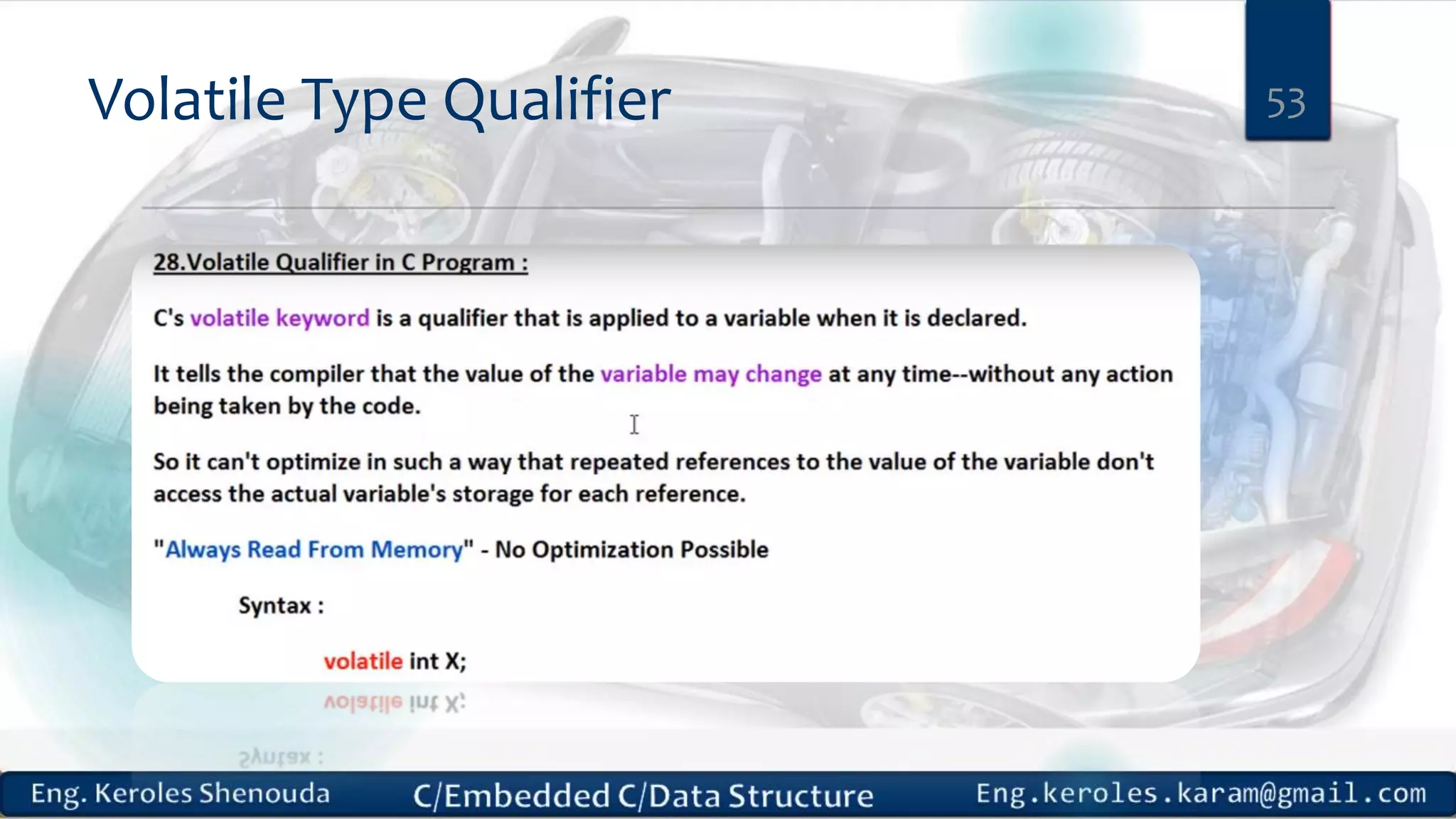
The document discusses C programming and embedded C programming concepts. It covers the differences between C and embedded C, embedded C constraints, how to make code more readable through commenting and documenting memory mapped devices. It also discusses data structures, stacks, queues, and provides code examples for stack implementation and operations using arrays.

![Basic Operations 88 int peek() { return stack[top]; } isfull() peek() bool isfull() { if(top == MAXSIZE) return true; else return false; } isempty() bool isempty() { if(top == -1) return true; else return false; }](https://image.slidesharecdn.com/cprogramming-session9-171018115953/75/C-programming-session9-88-2048.jpg)
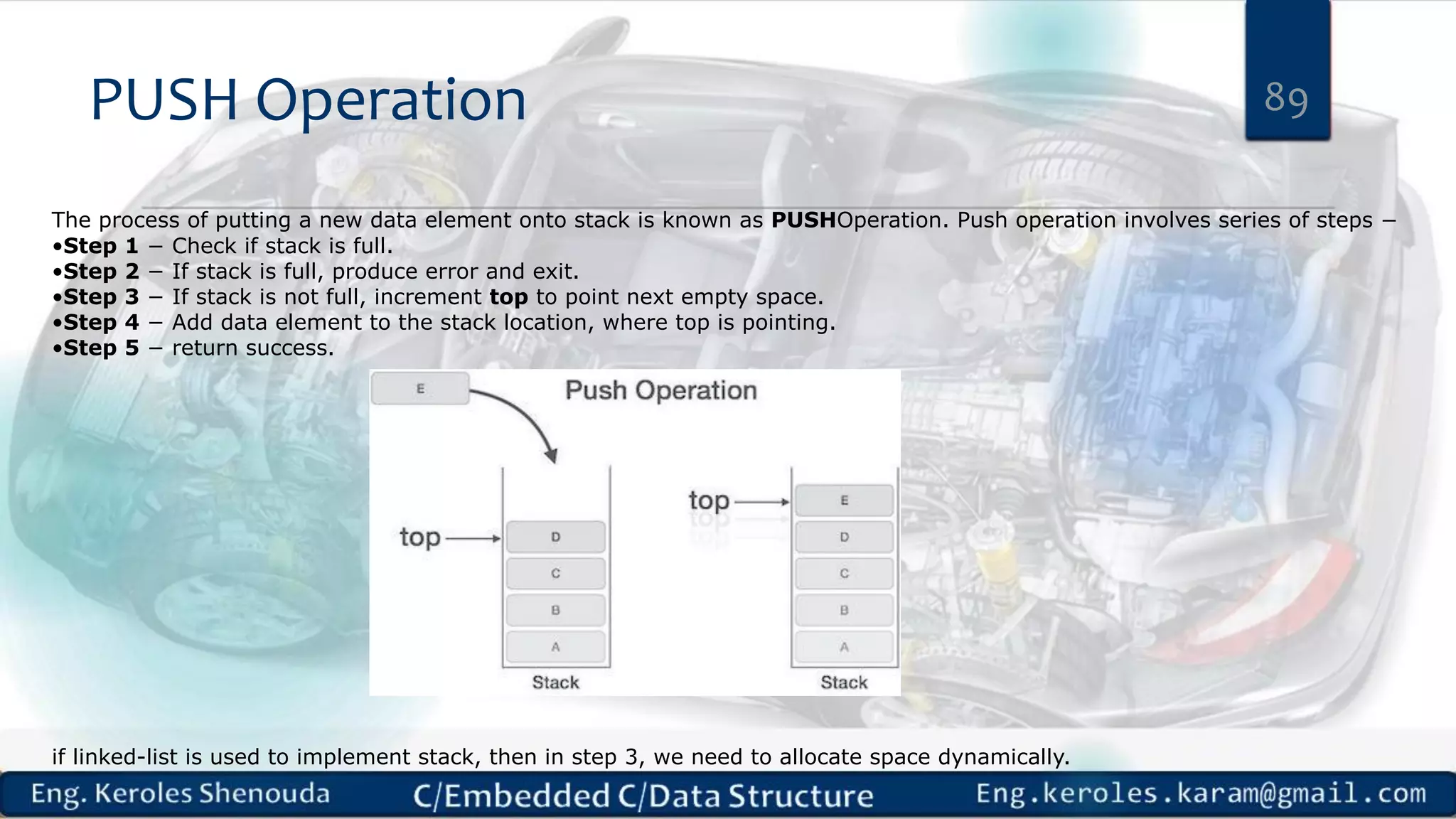
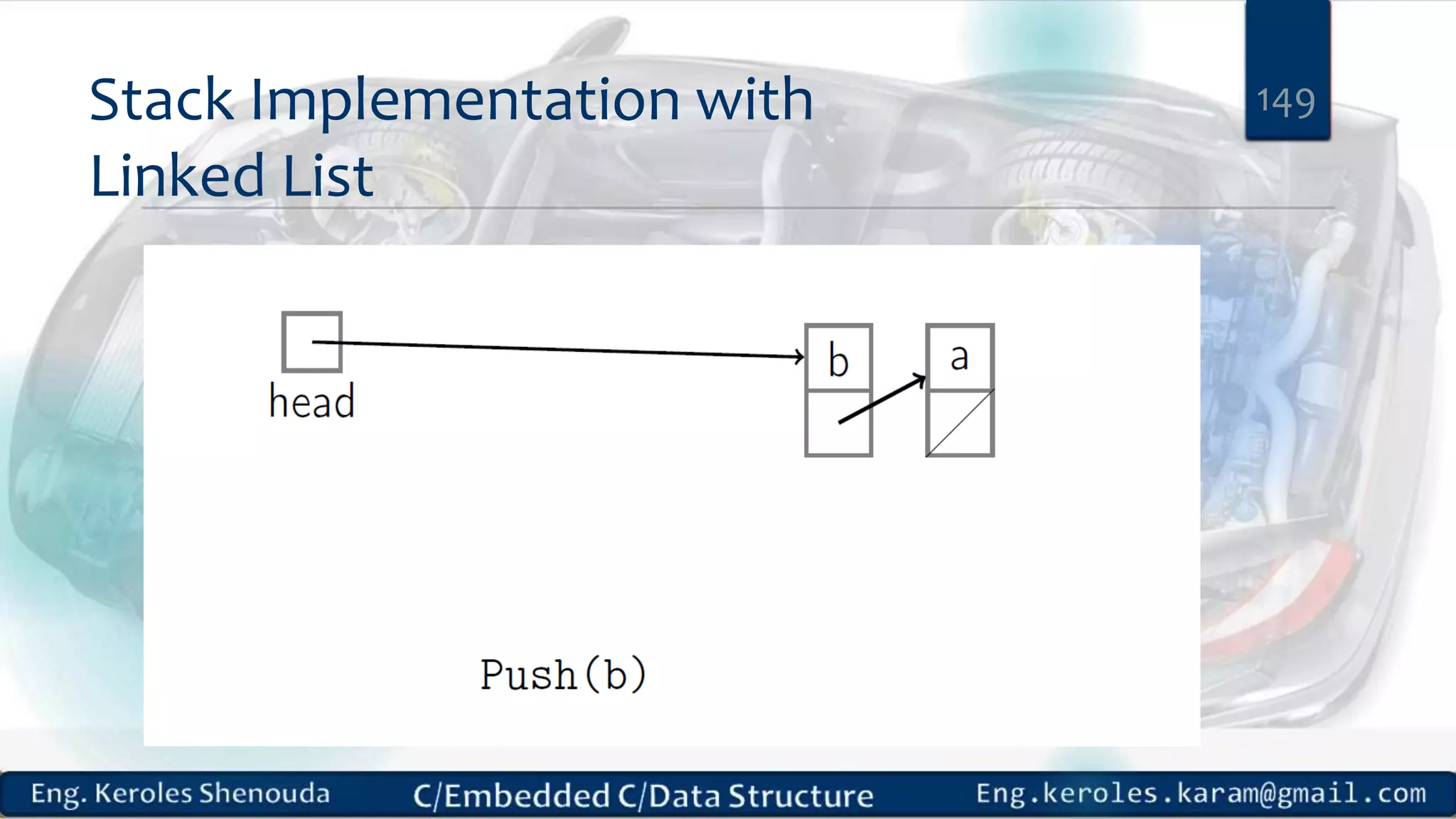
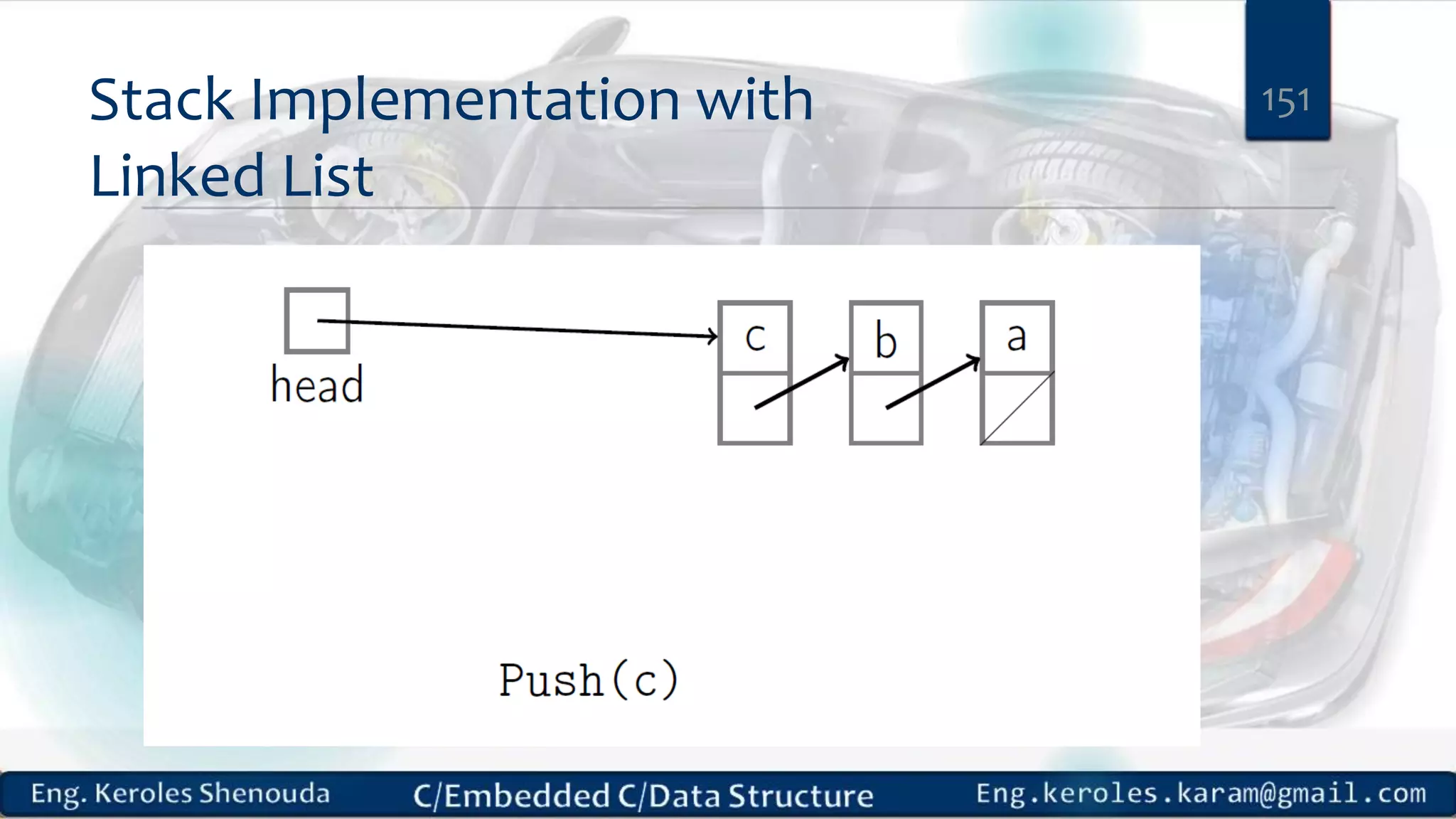
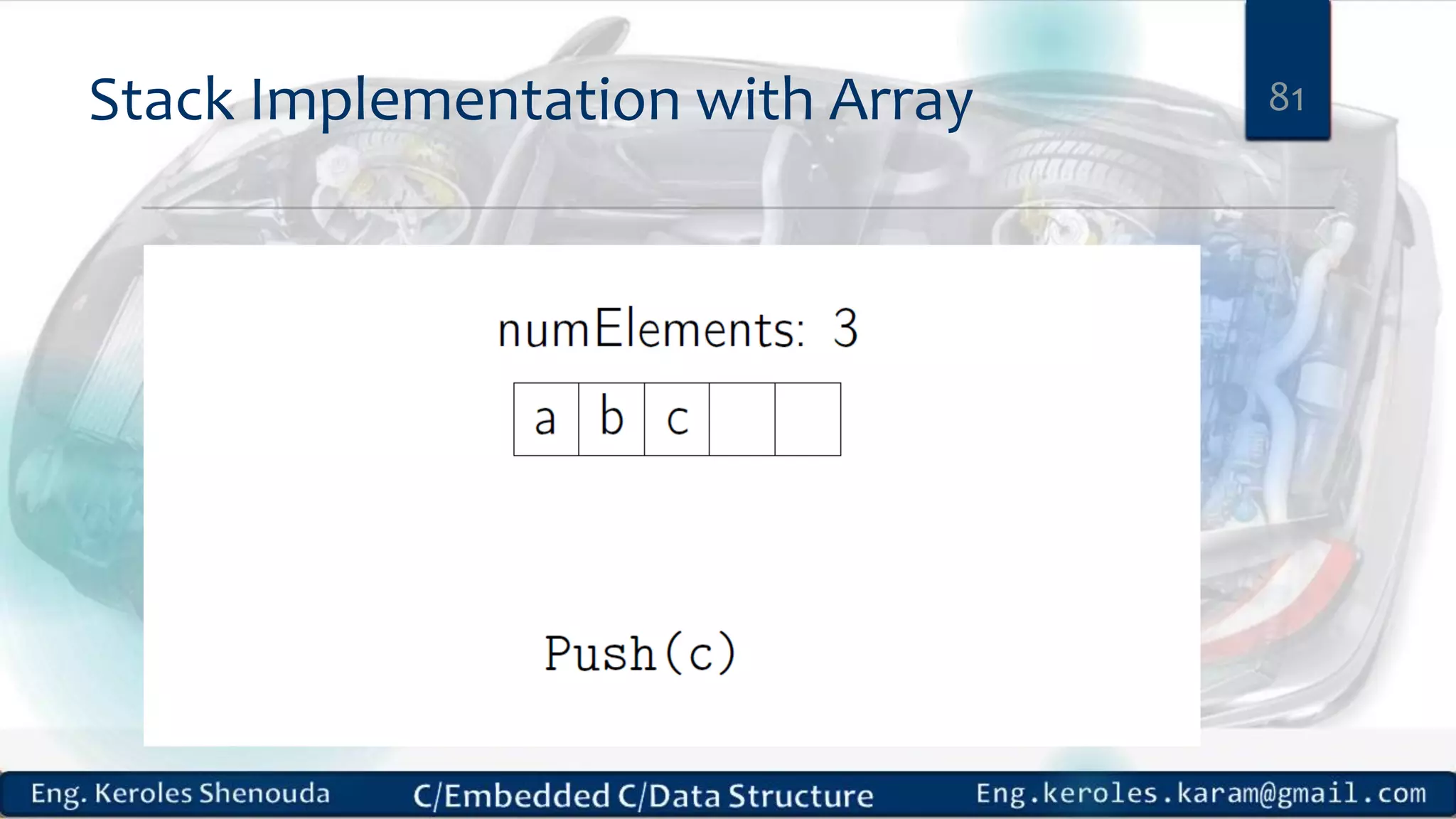
![PUSH Operation 90 void push(int data) { if(!isFull()) { top = top + 1; stack[top] = data; }else { printf("Could not insert data, Stack is full.n"); } }](https://image.slidesharecdn.com/cprogramming-session9-171018115953/75/C-programming-session9-90-2048.jpg)