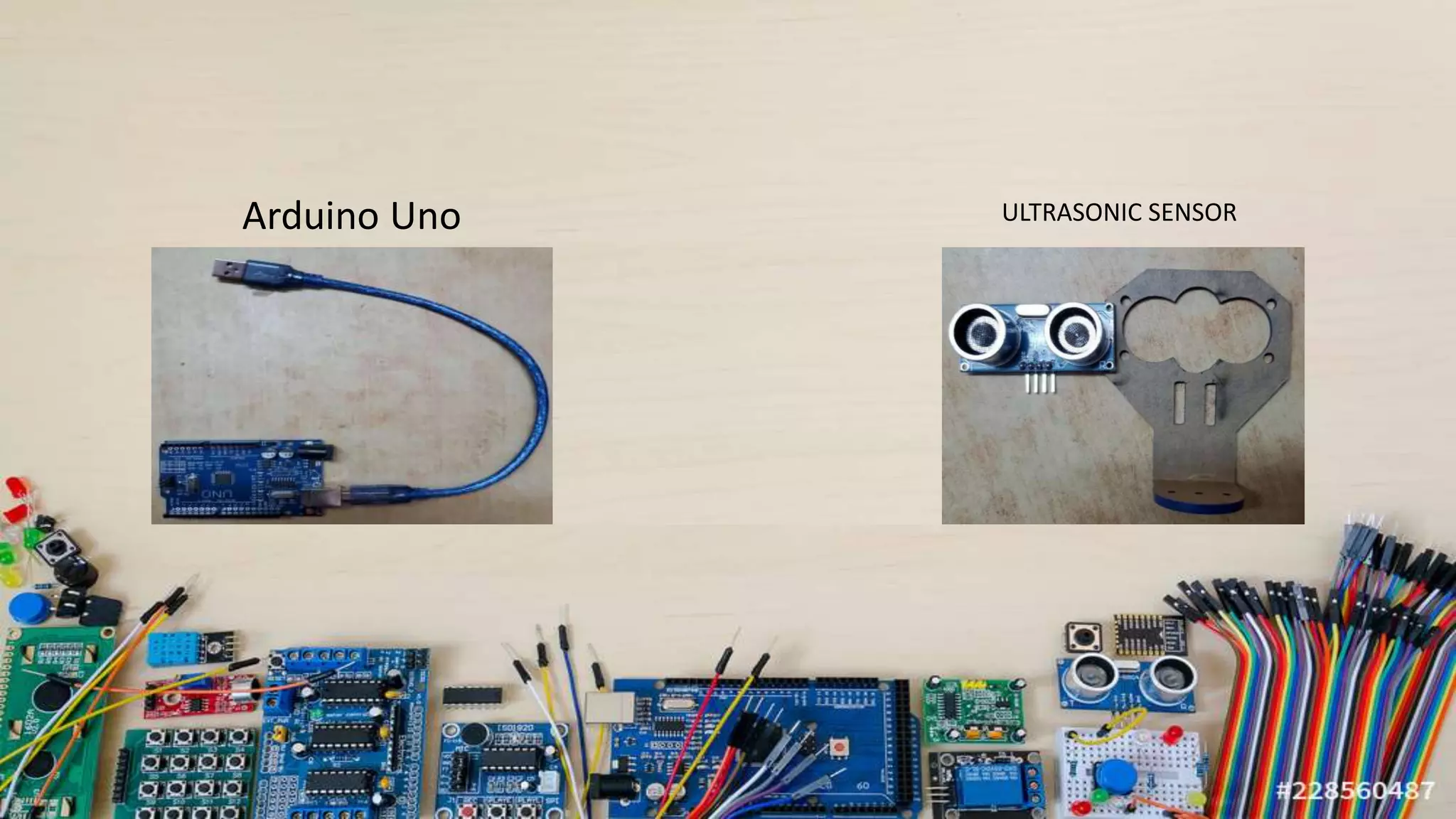
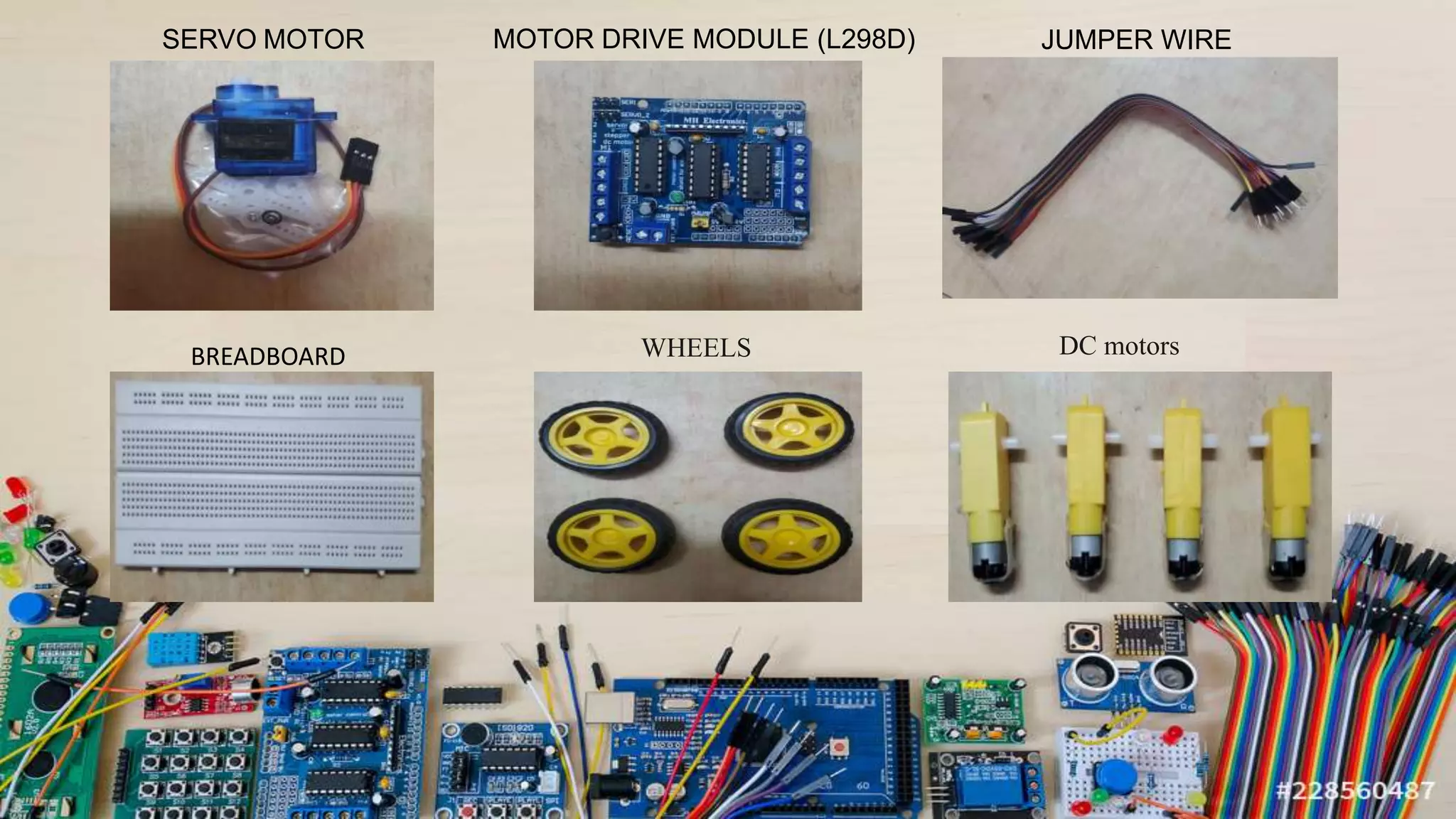
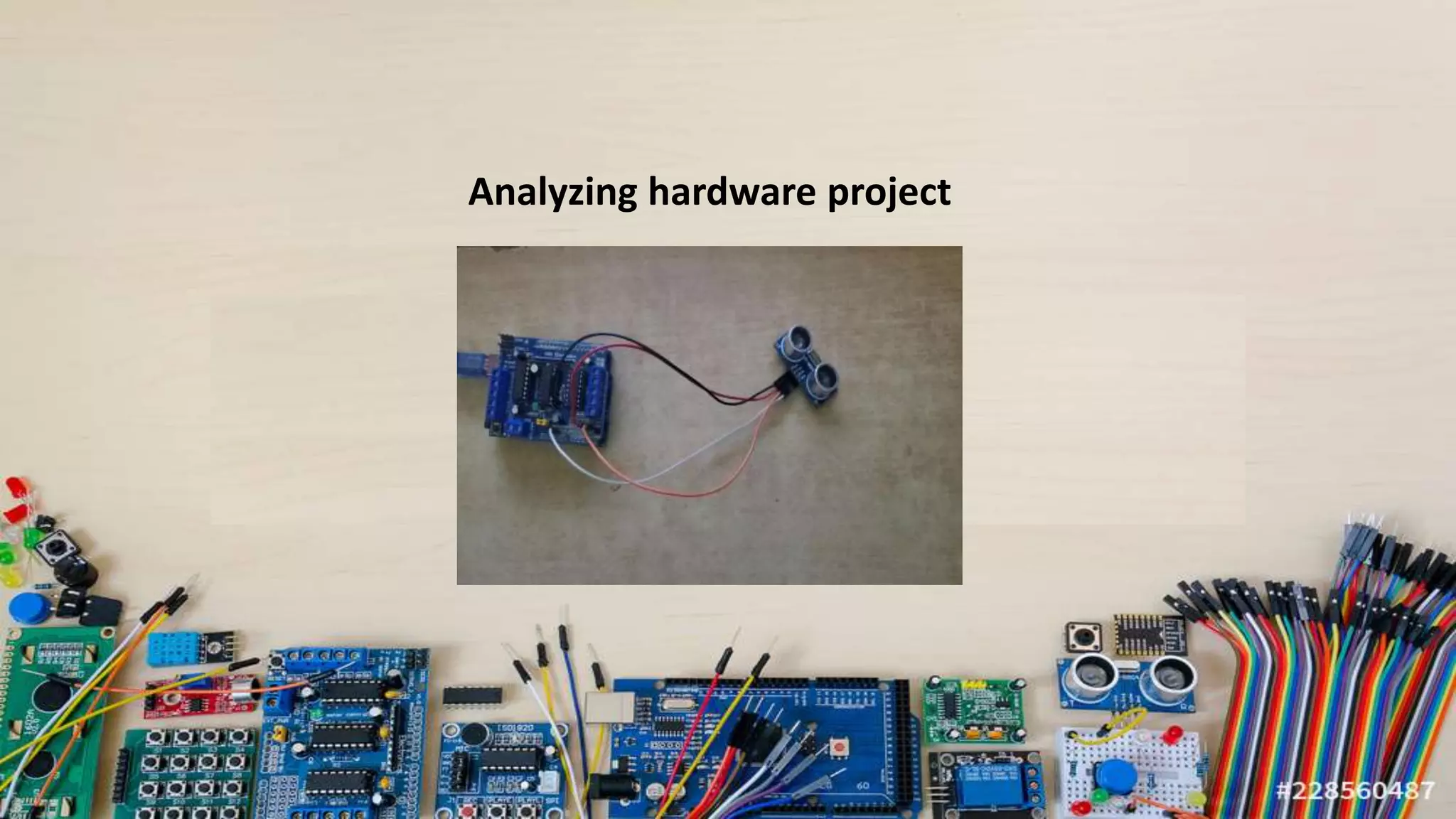
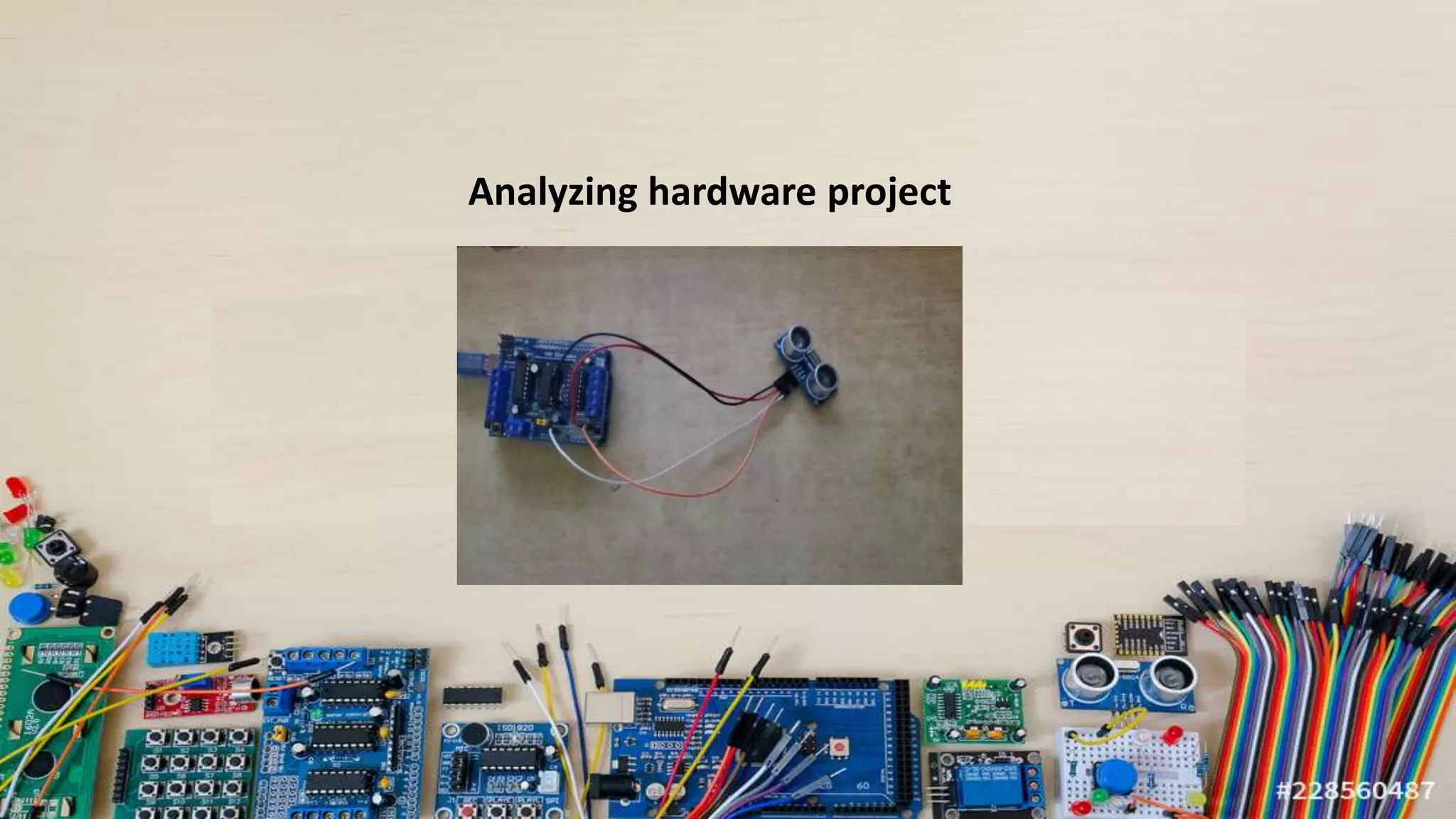
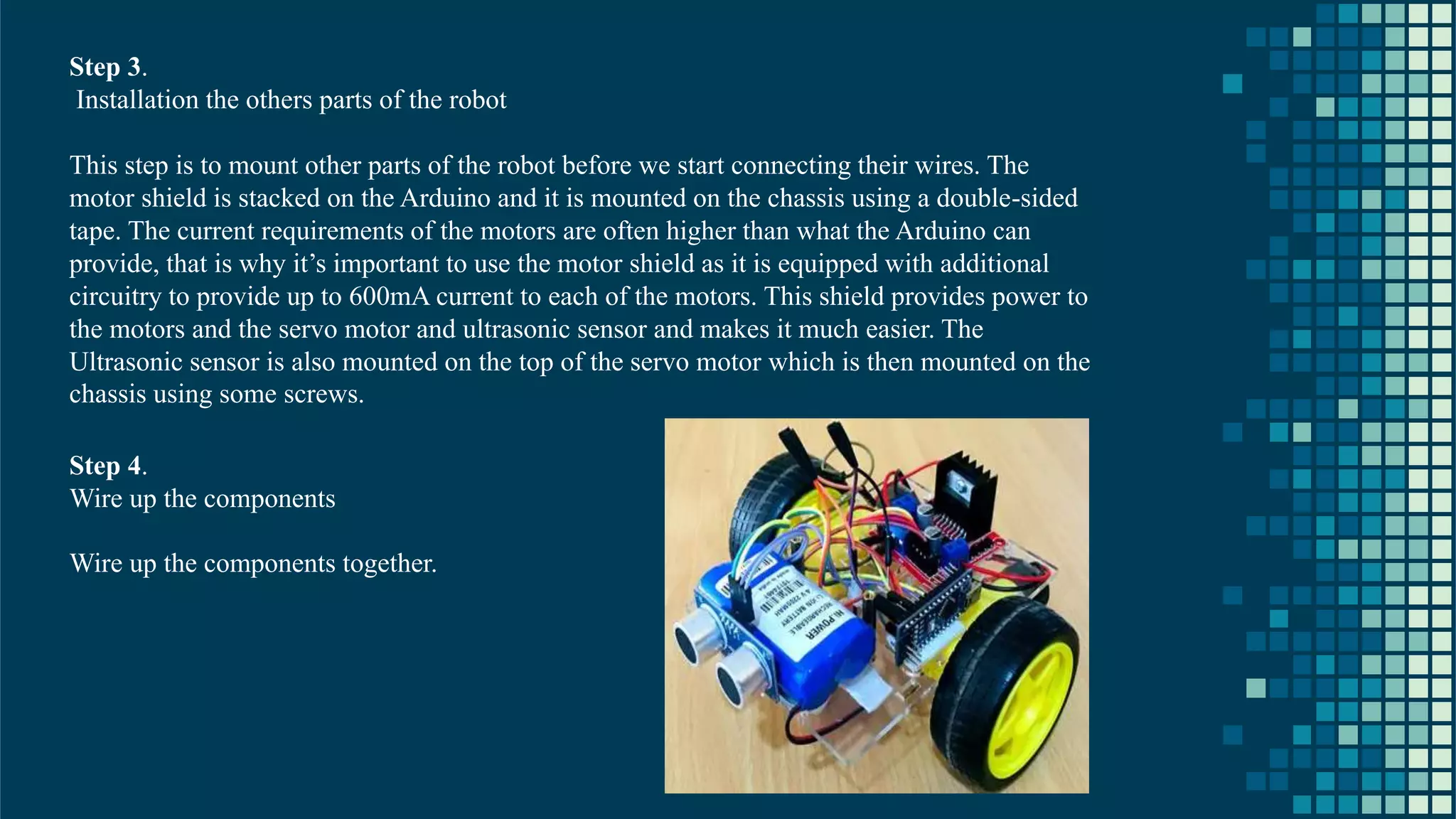
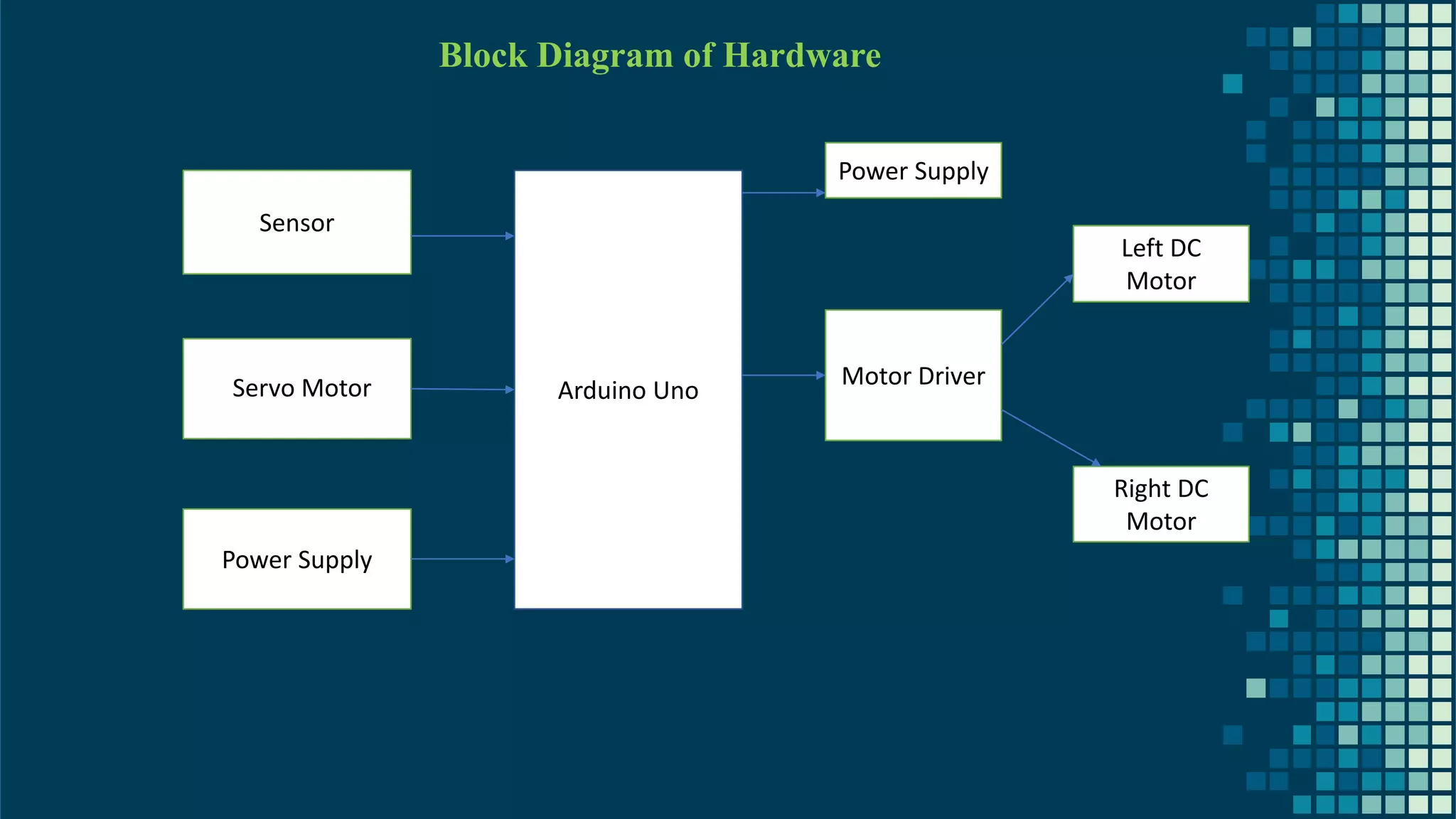
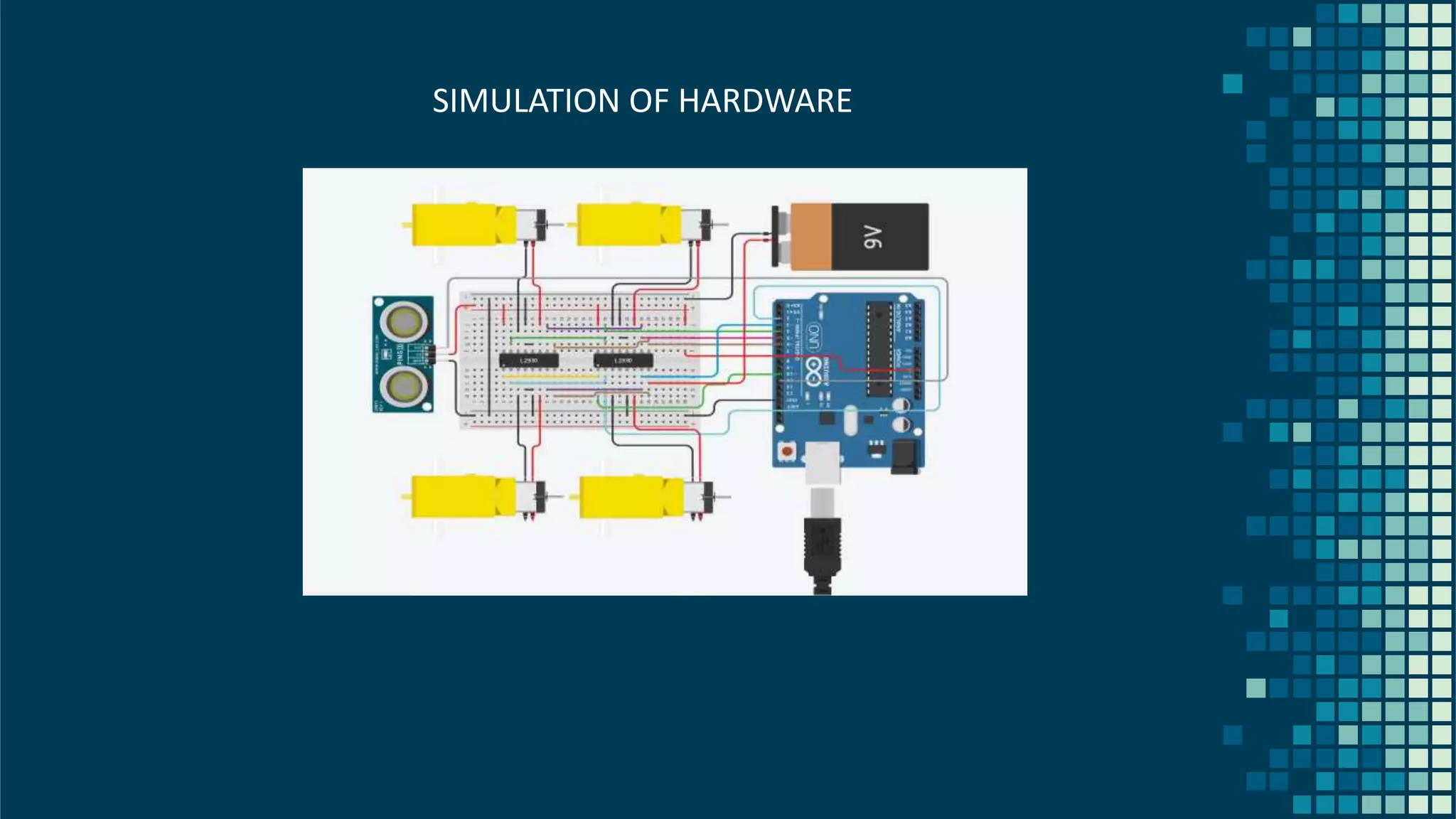
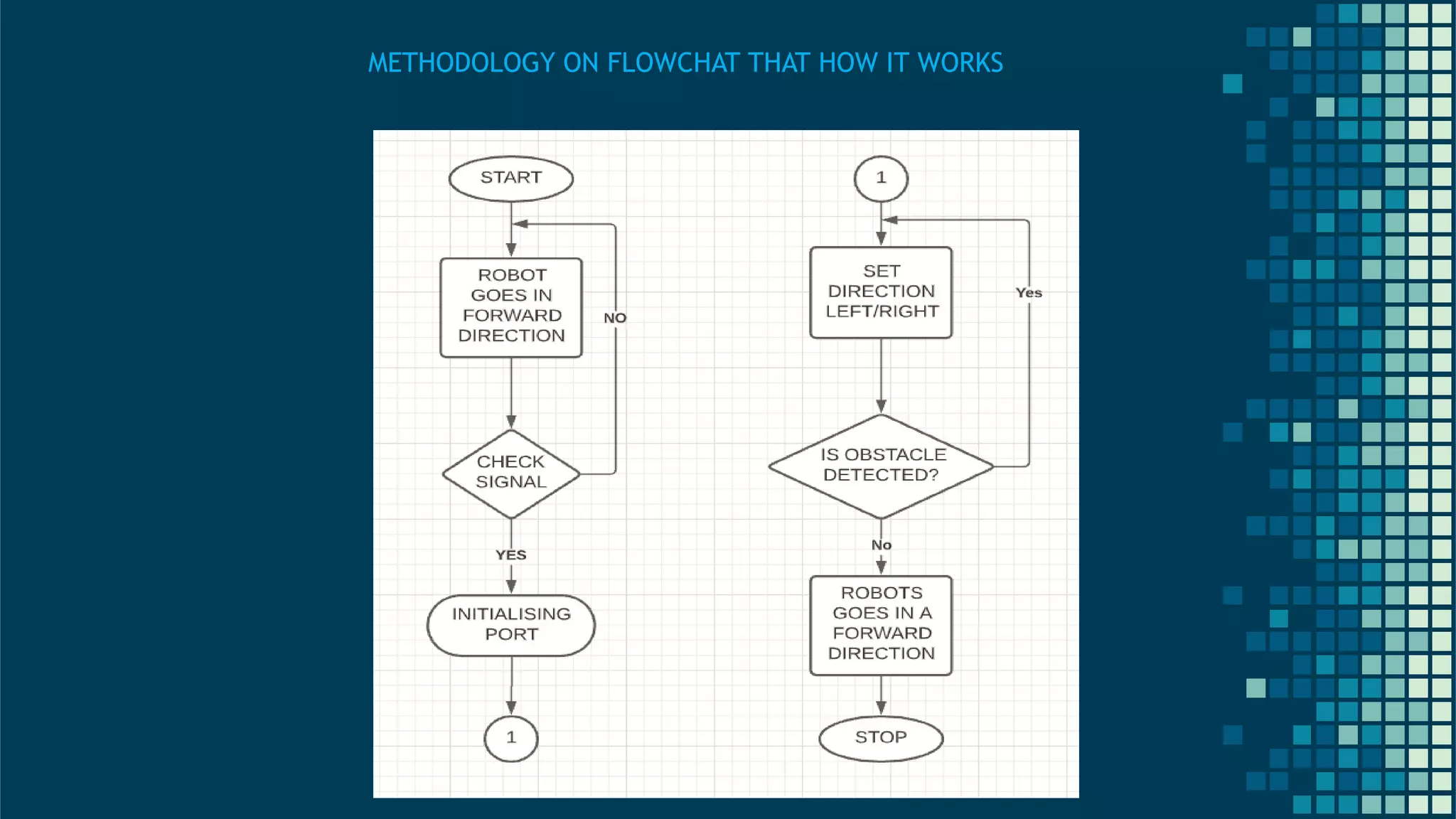
The document details a project report on an obstacle-avoiding robot developed as part of a nanoscience and nanotechnology course. The robot utilizes infrared and ultrasonic sensors for obstacle detection and is controlled via Arduino, with specific hardware components like servo motors and motor driver shields. The project aims to provide educational insights for beginners and promote understanding of embedded systems and robotics.