Downloaded 1,441 times
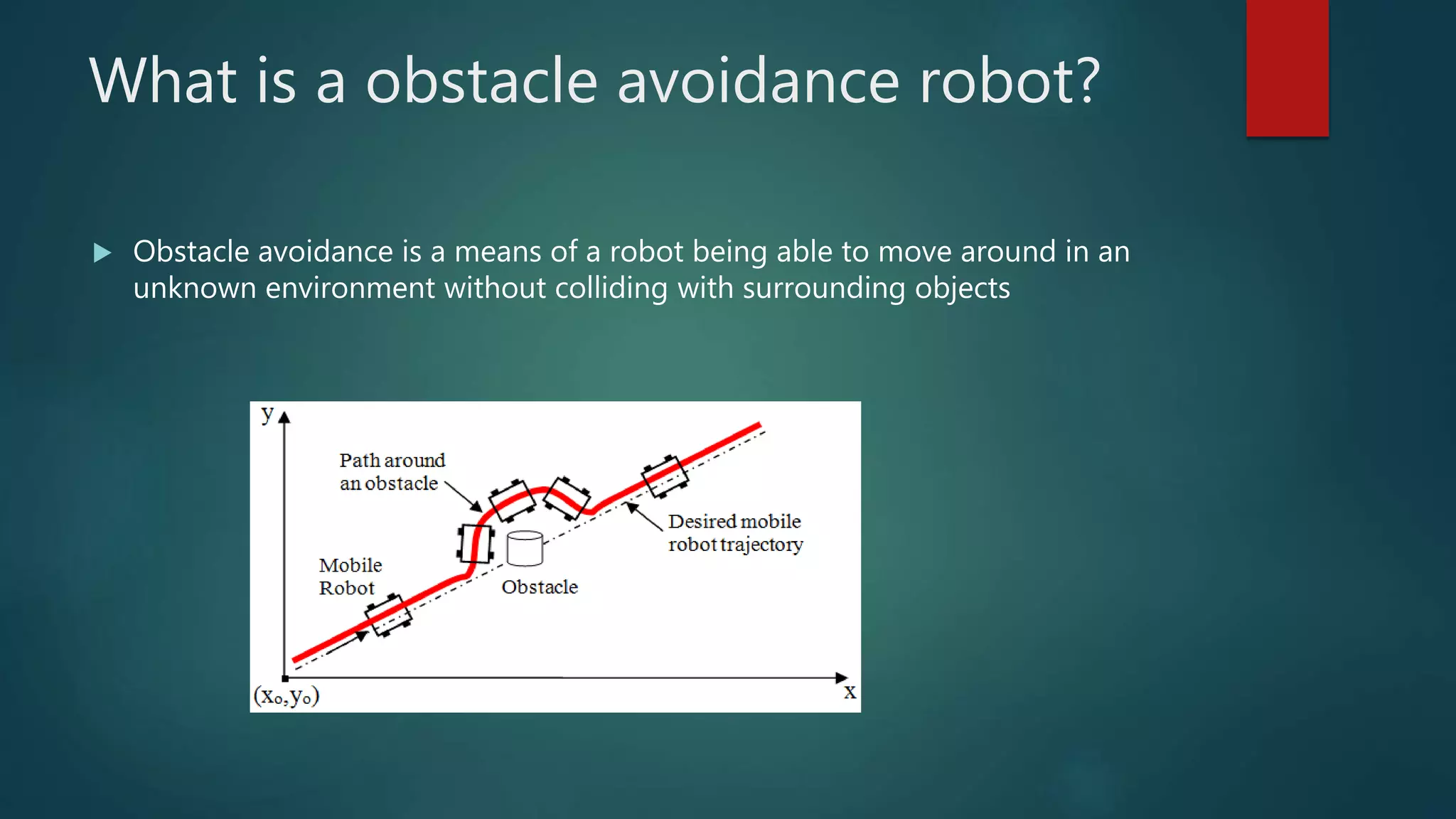
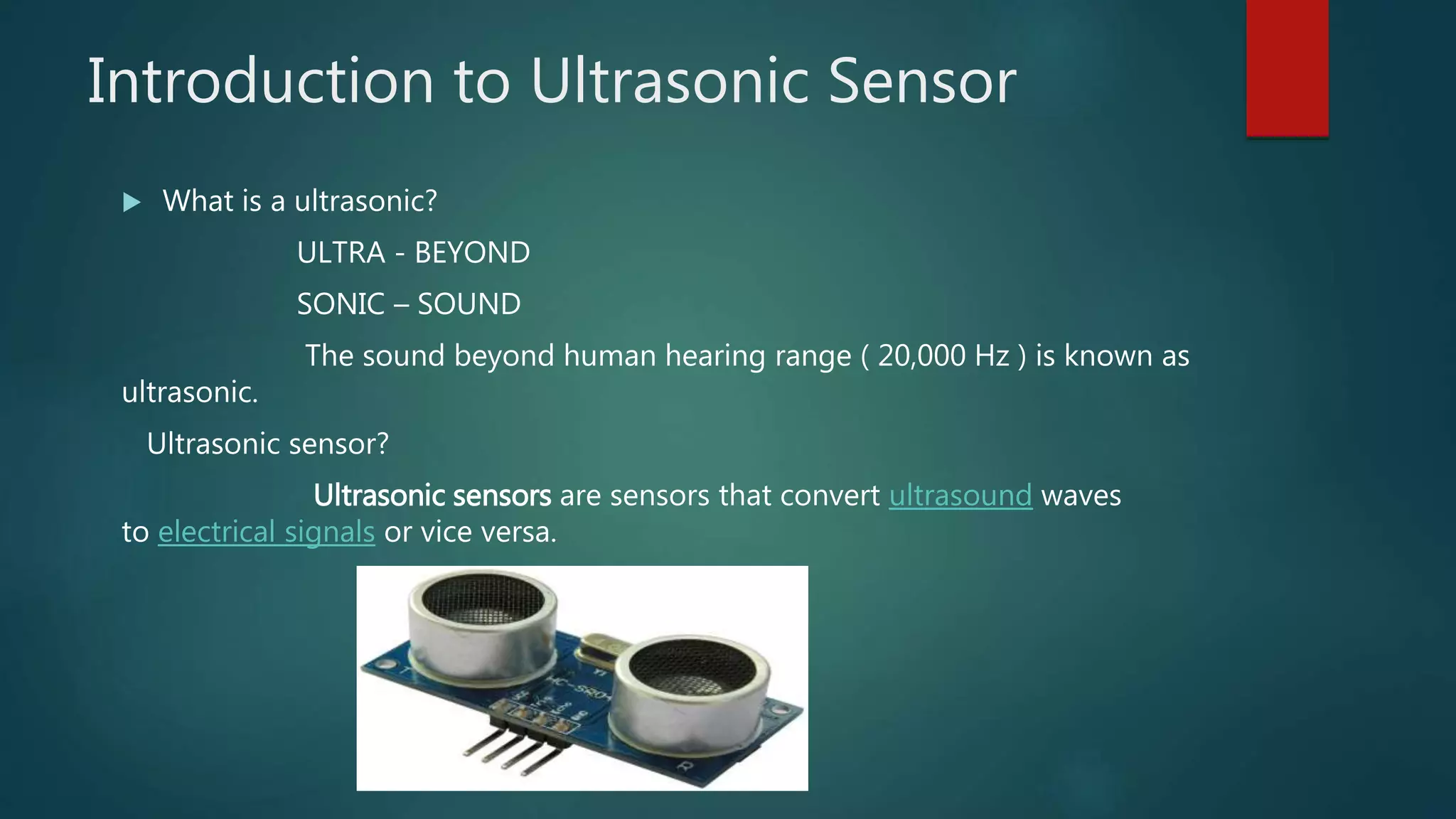

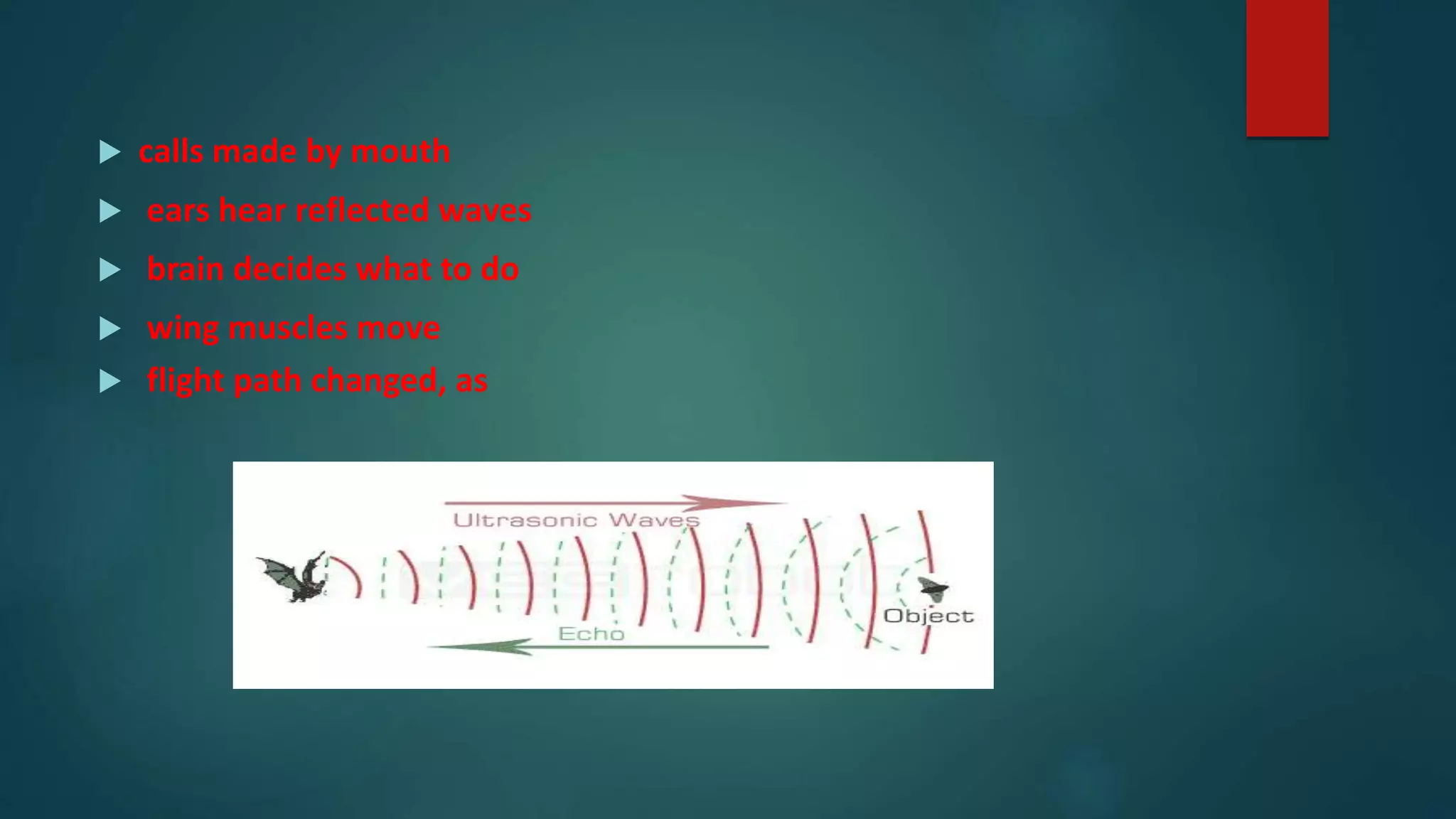
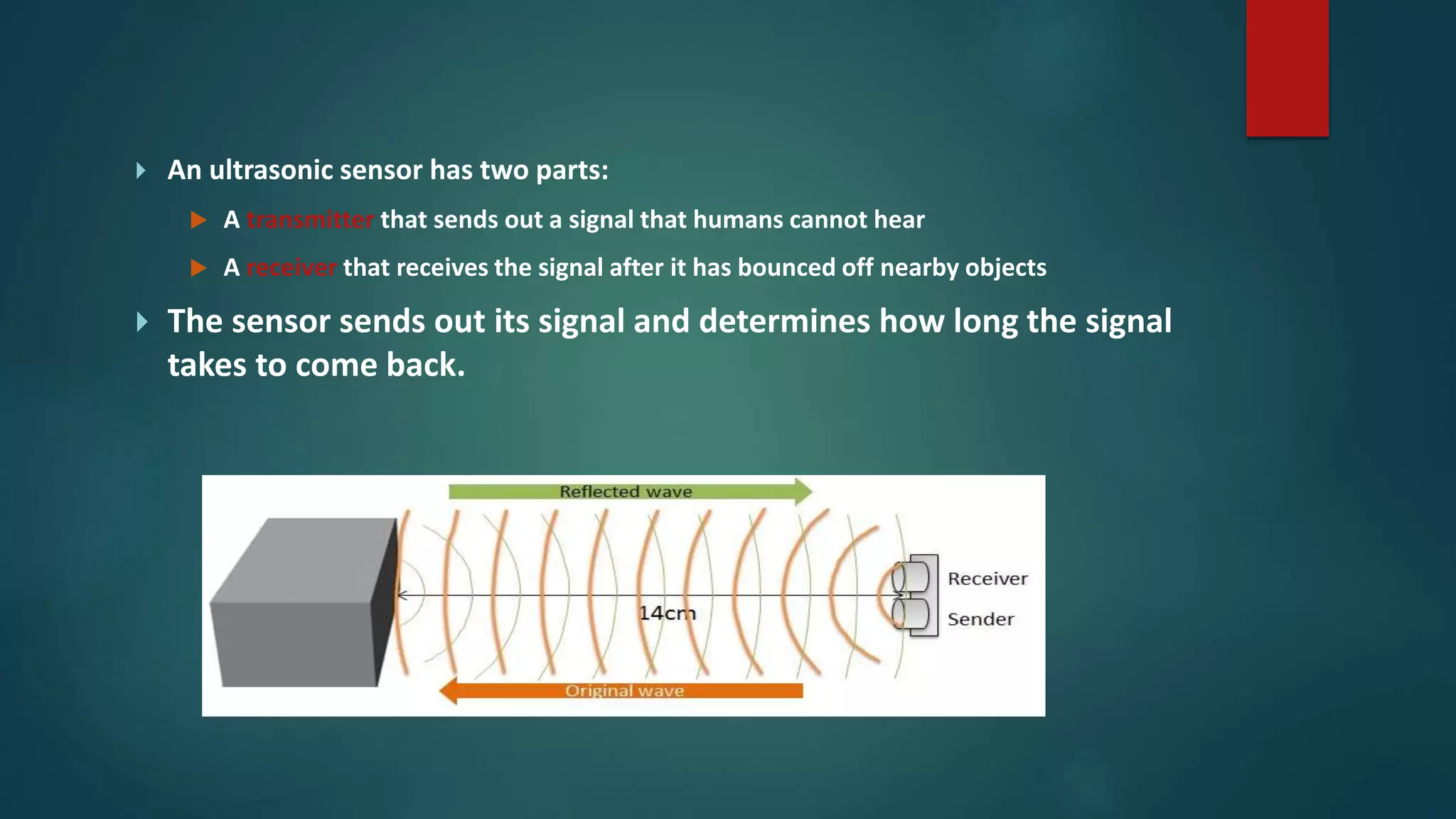
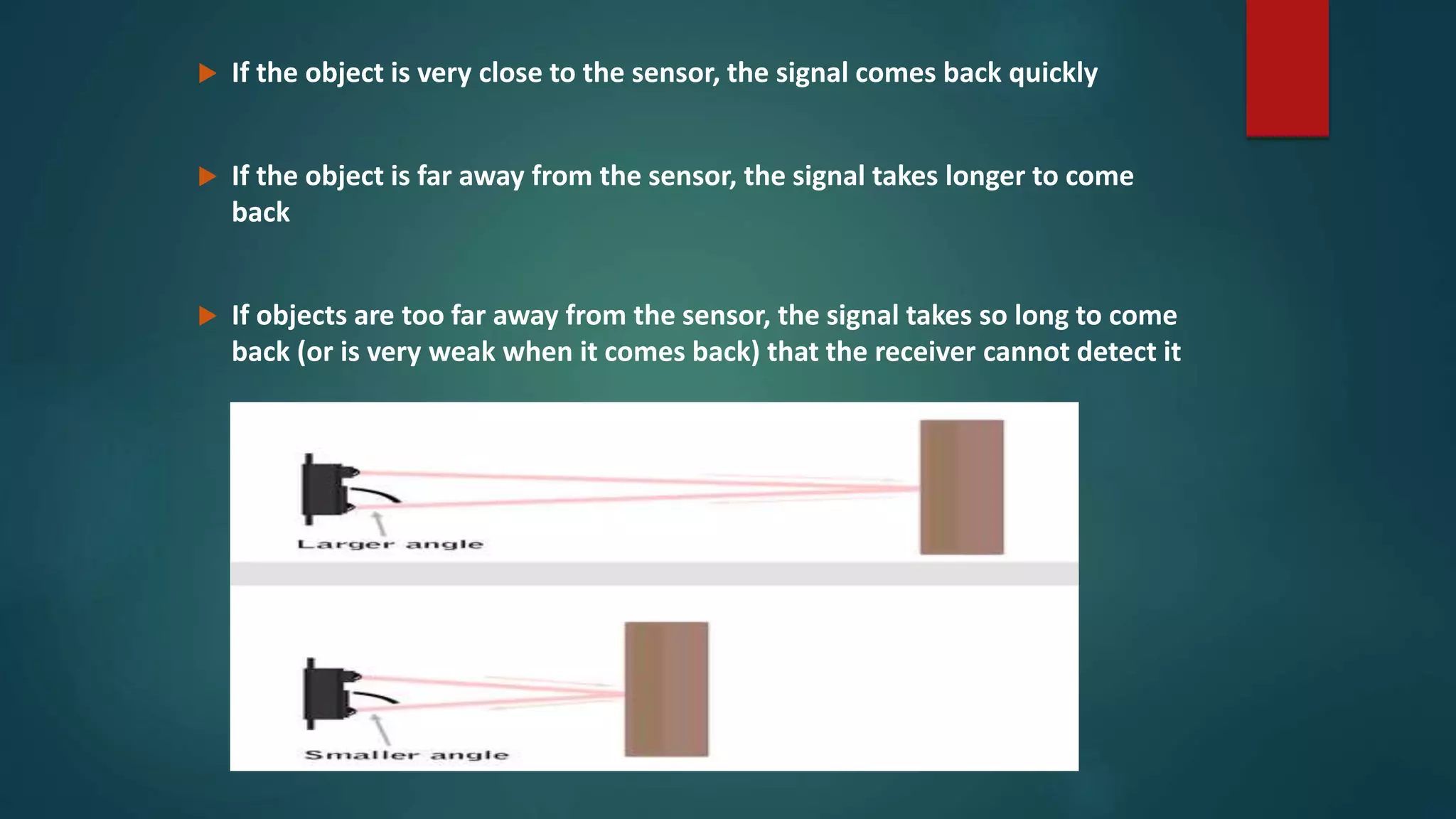
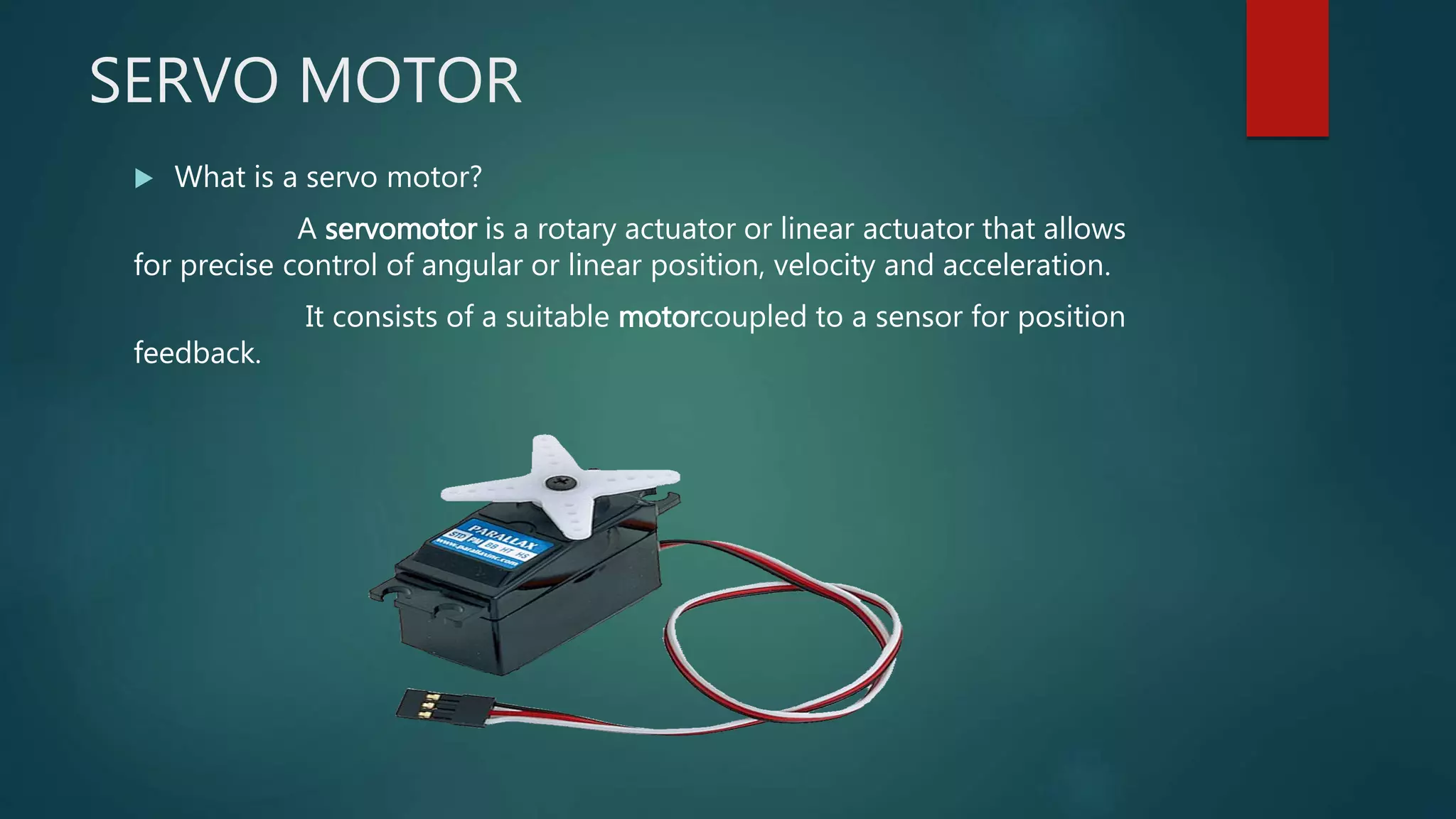
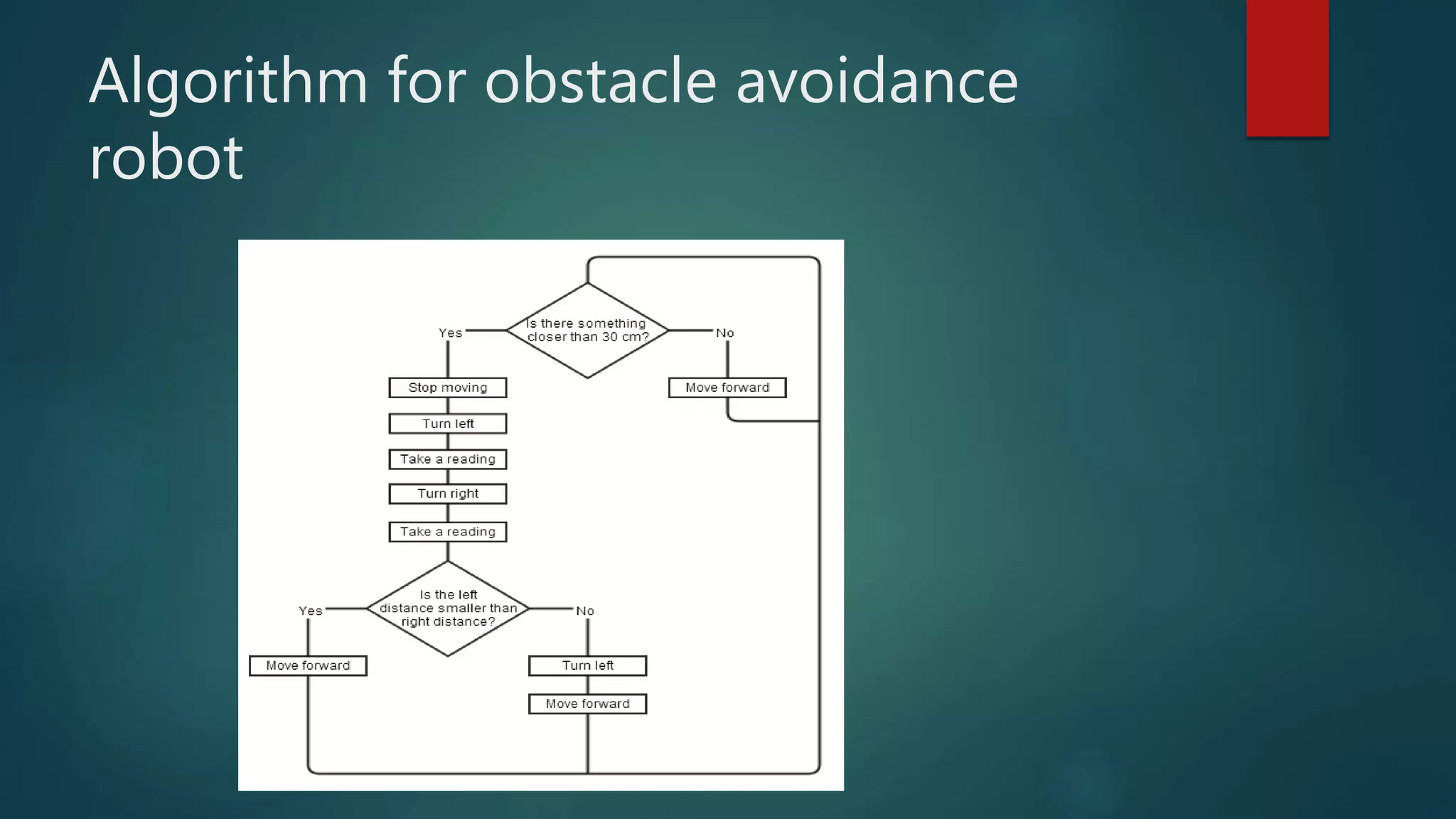
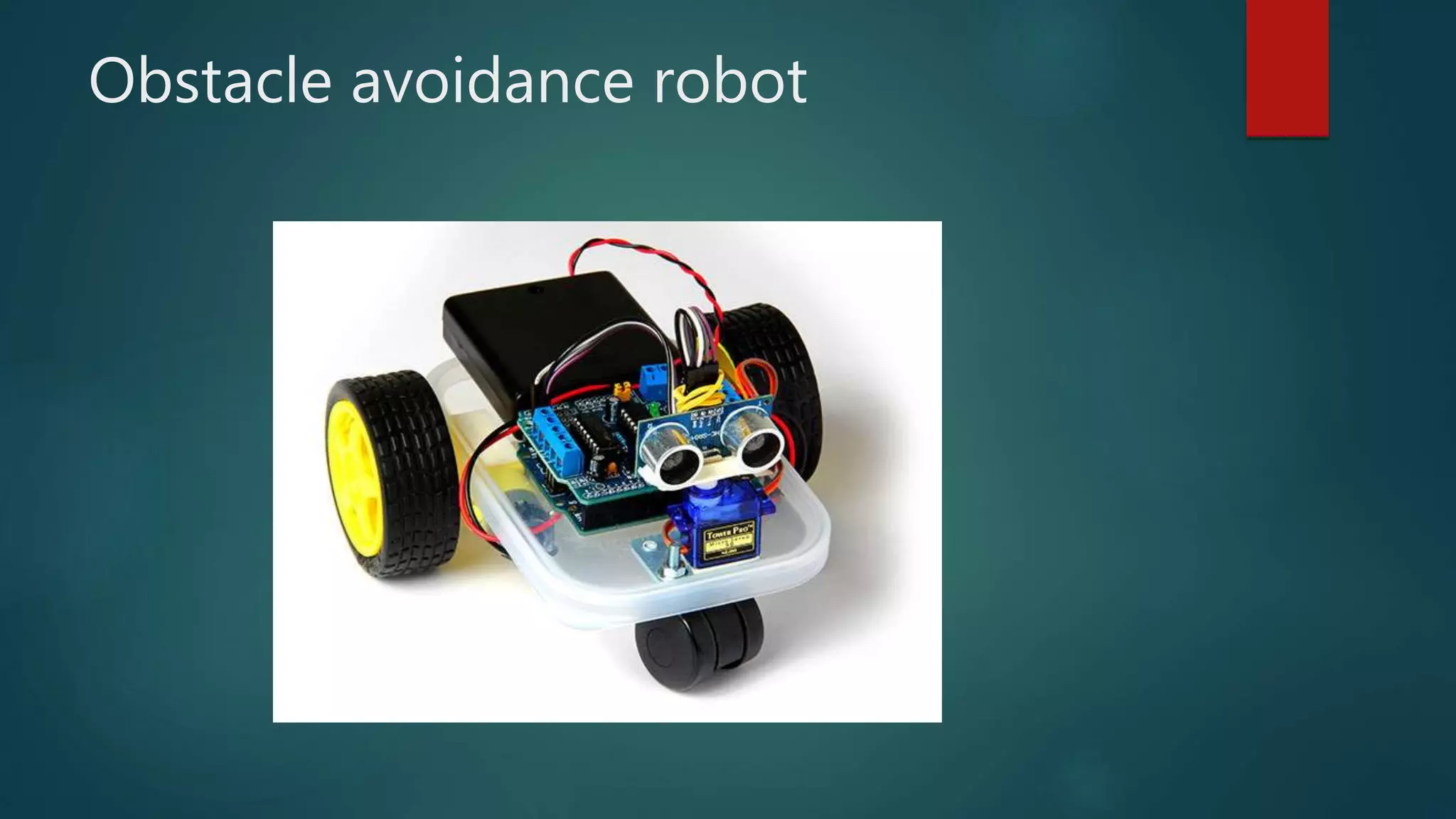


The document discusses obstacle avoidance robots that navigate unknown environments using ultrasonic sensors to detect nearby objects. Ultrasonic sensors work by emitting sound waves and measuring the time it takes for the waves to bounce back, allowing the robot to estimate distances. Additionally, servo motors are highlighted for their role in providing precise control in these robotic systems, with applications ranging from toys to military use.