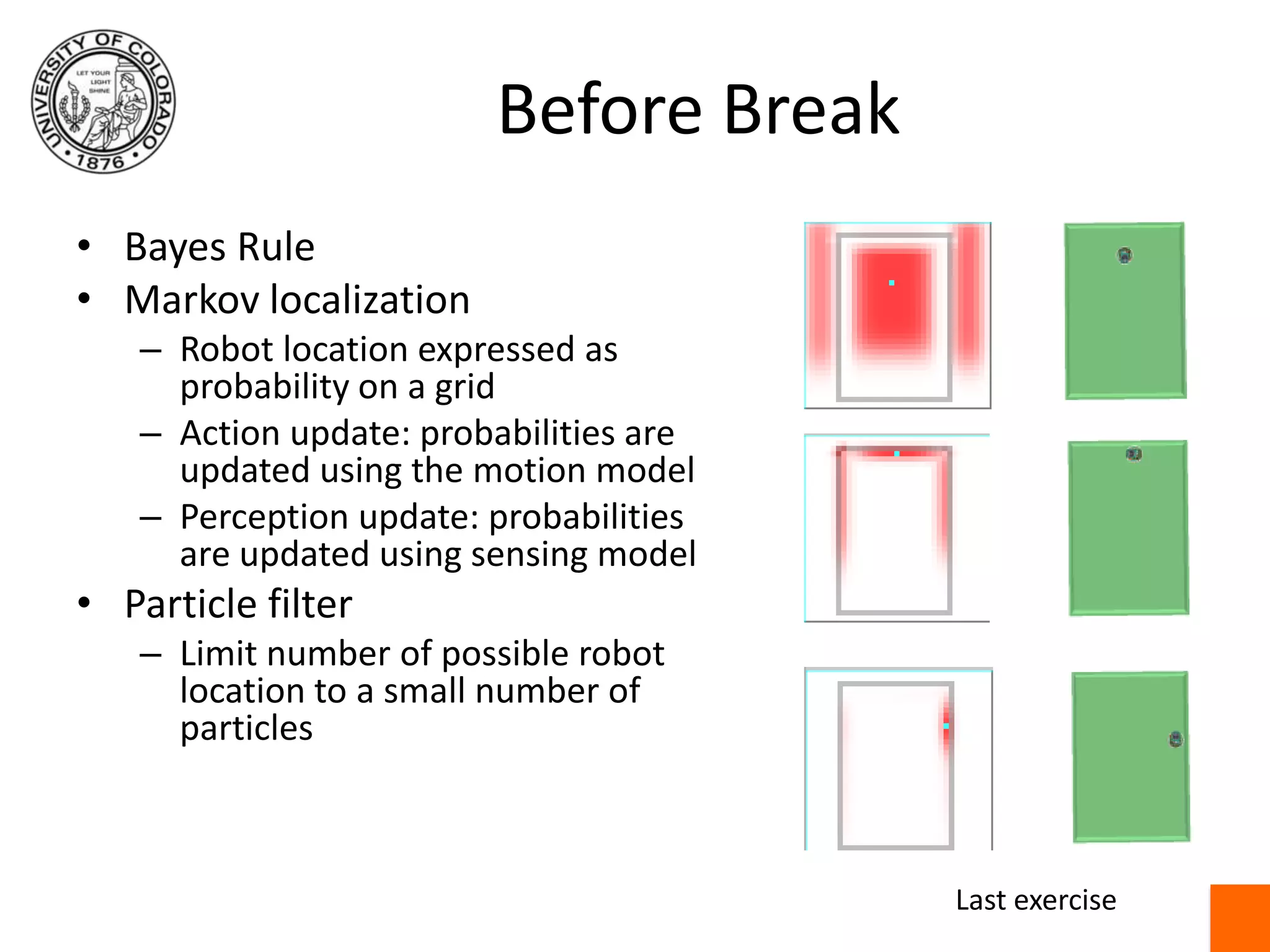
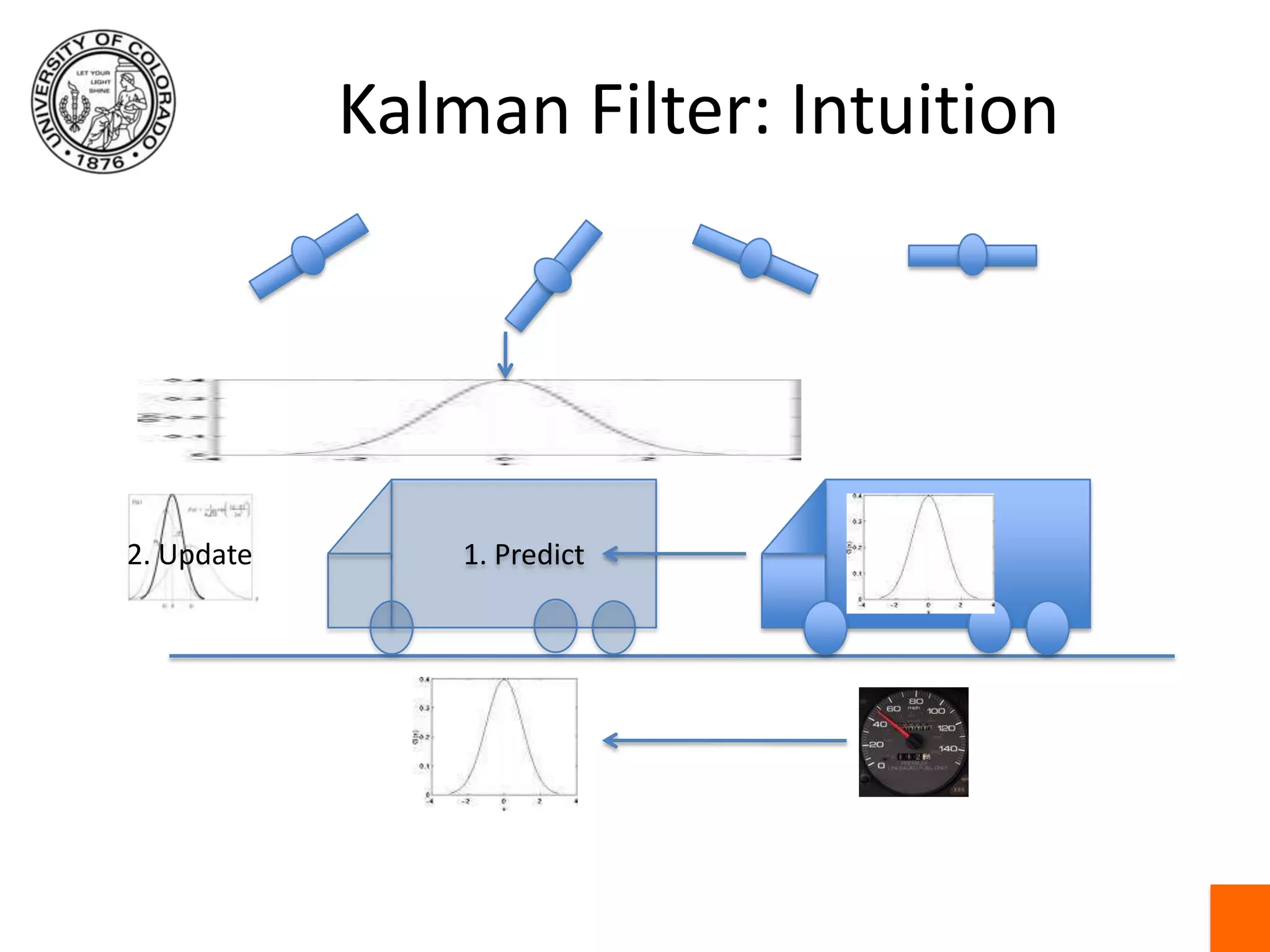
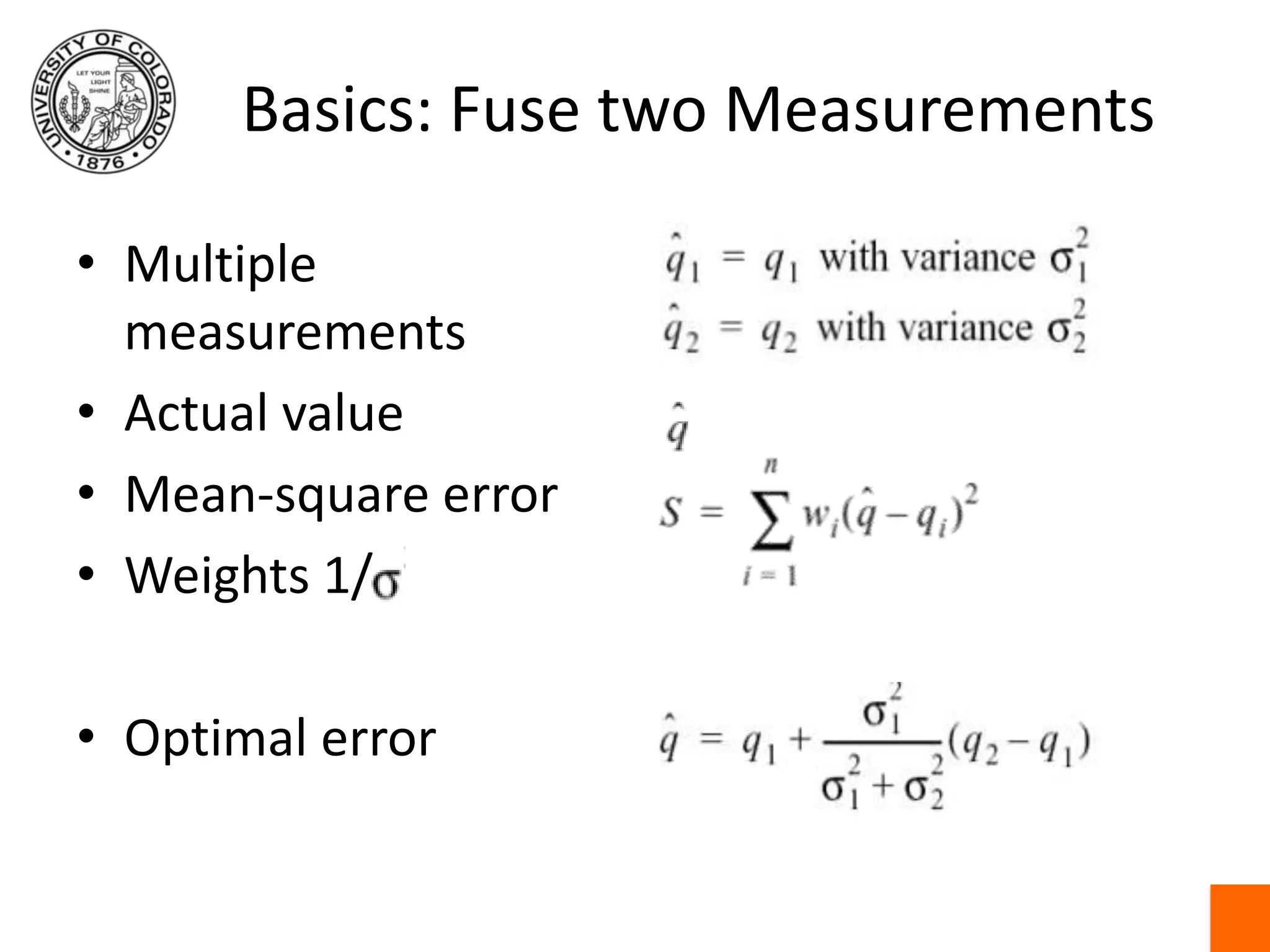
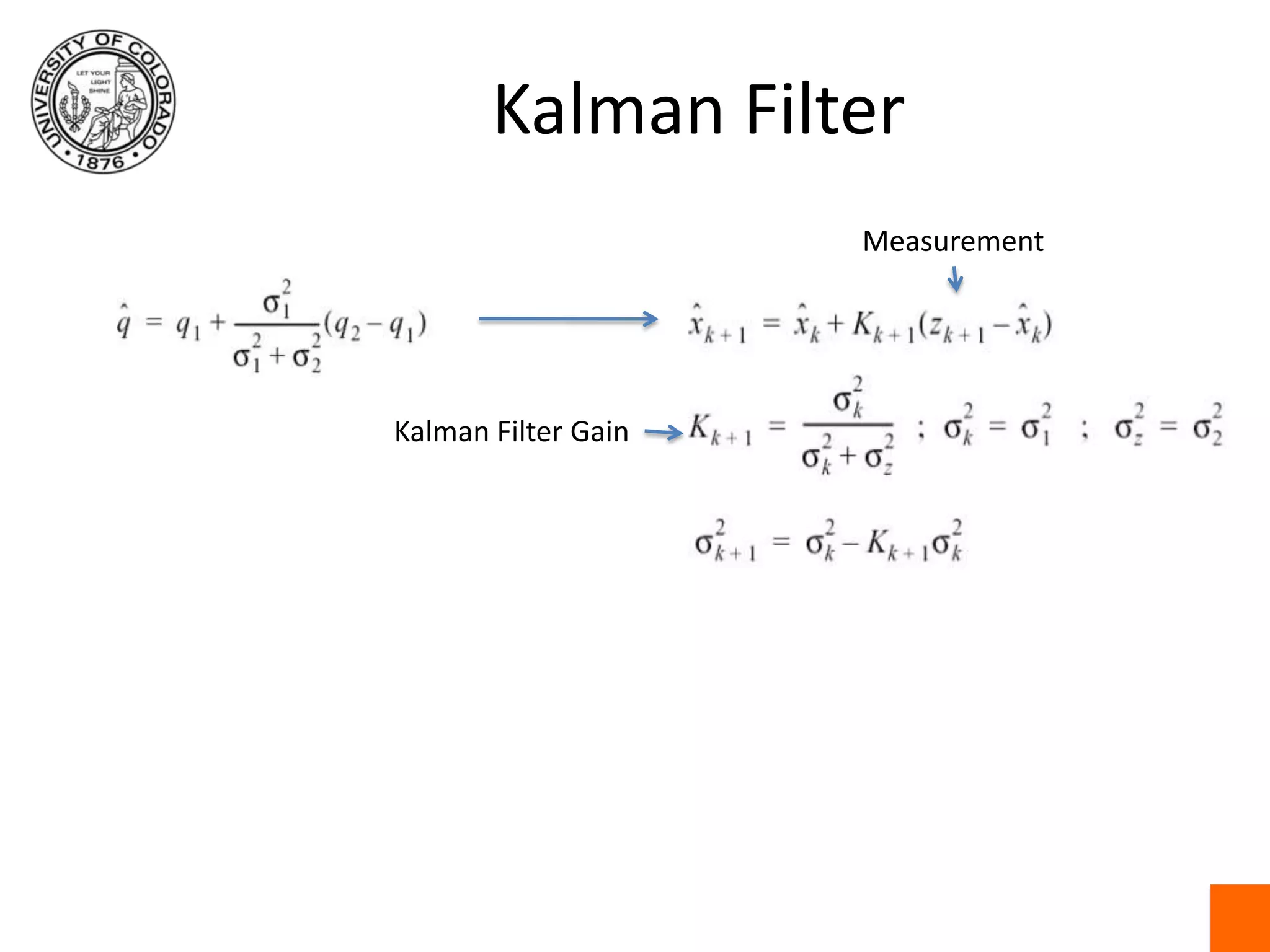
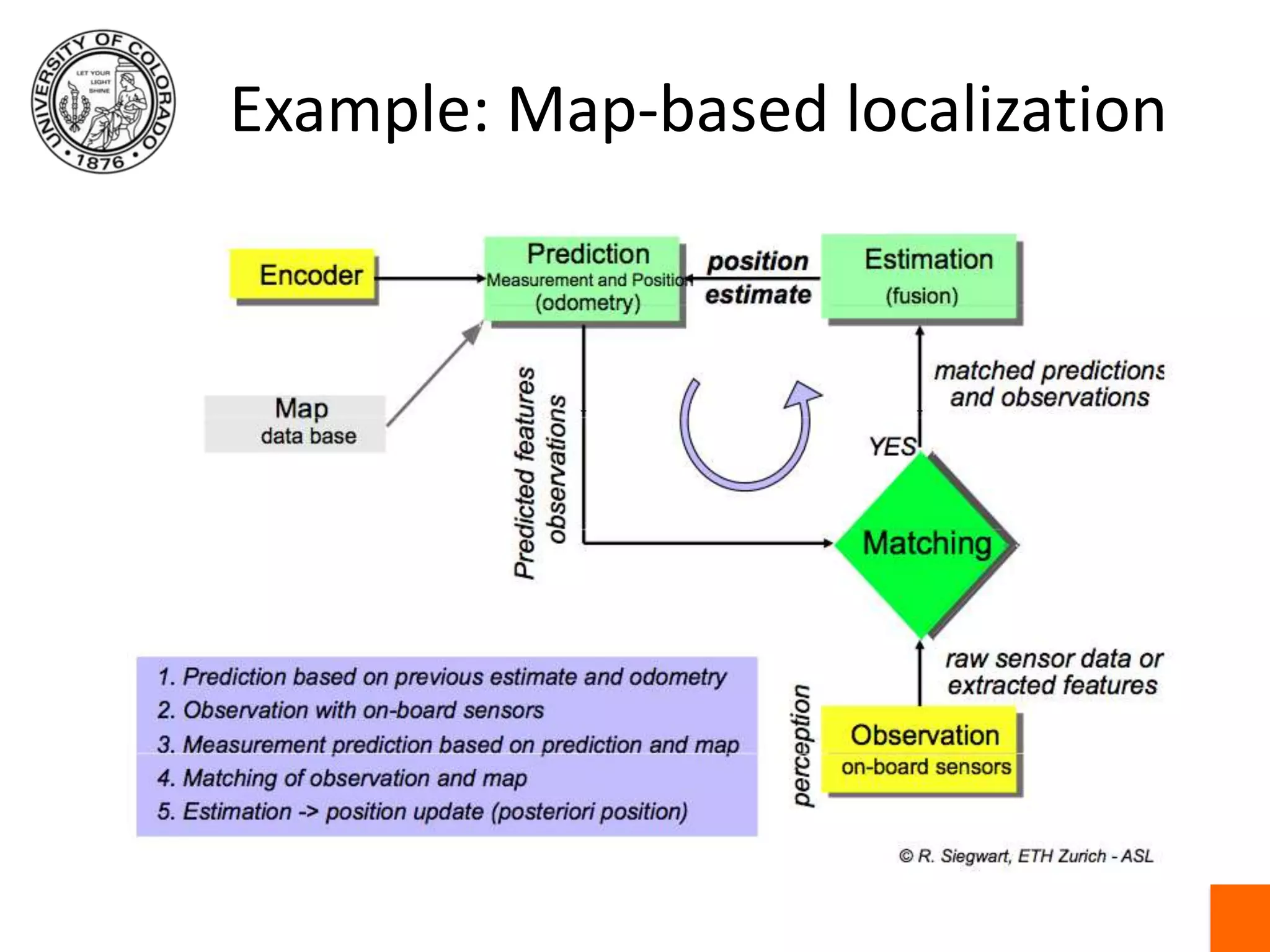
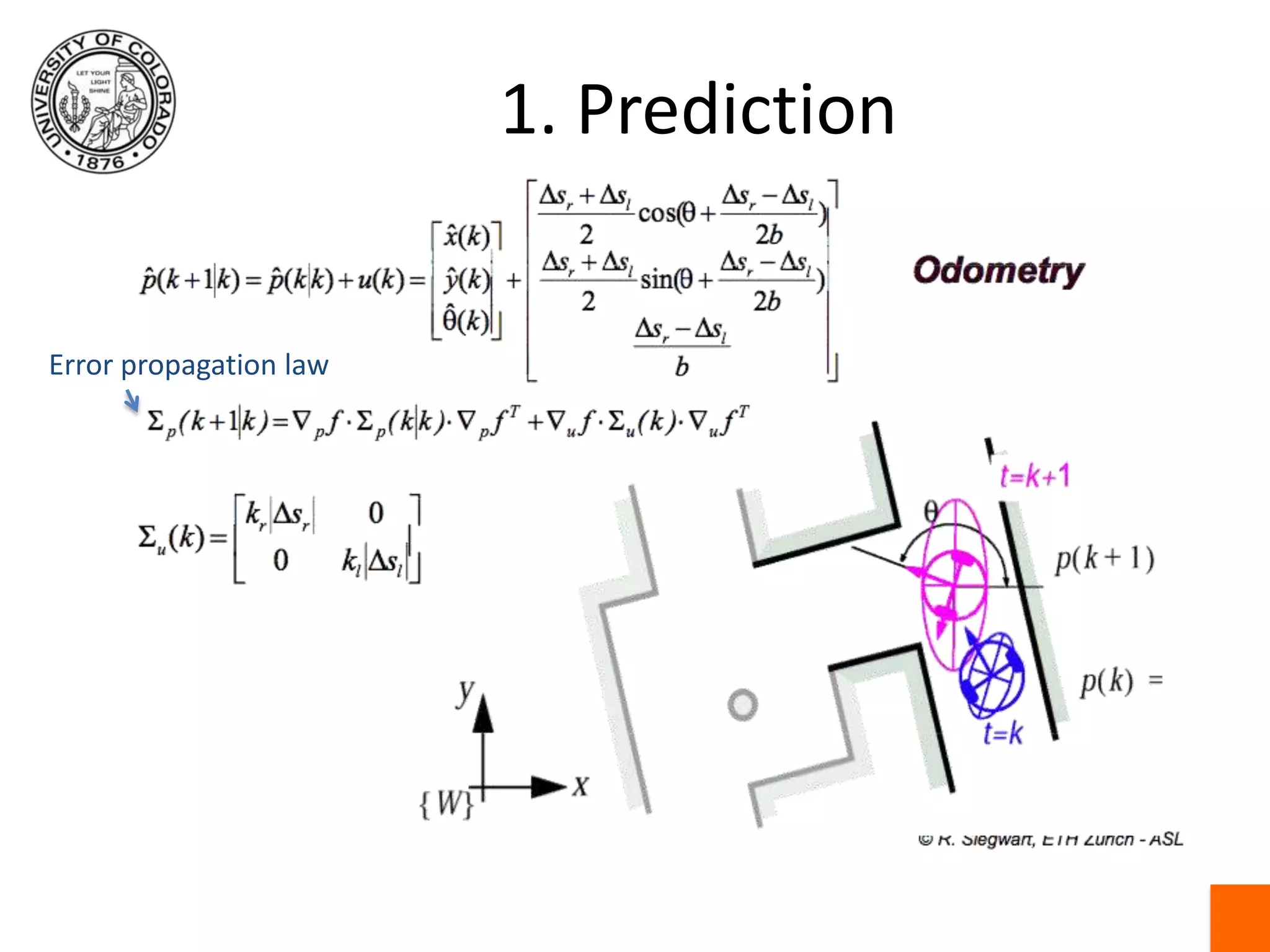
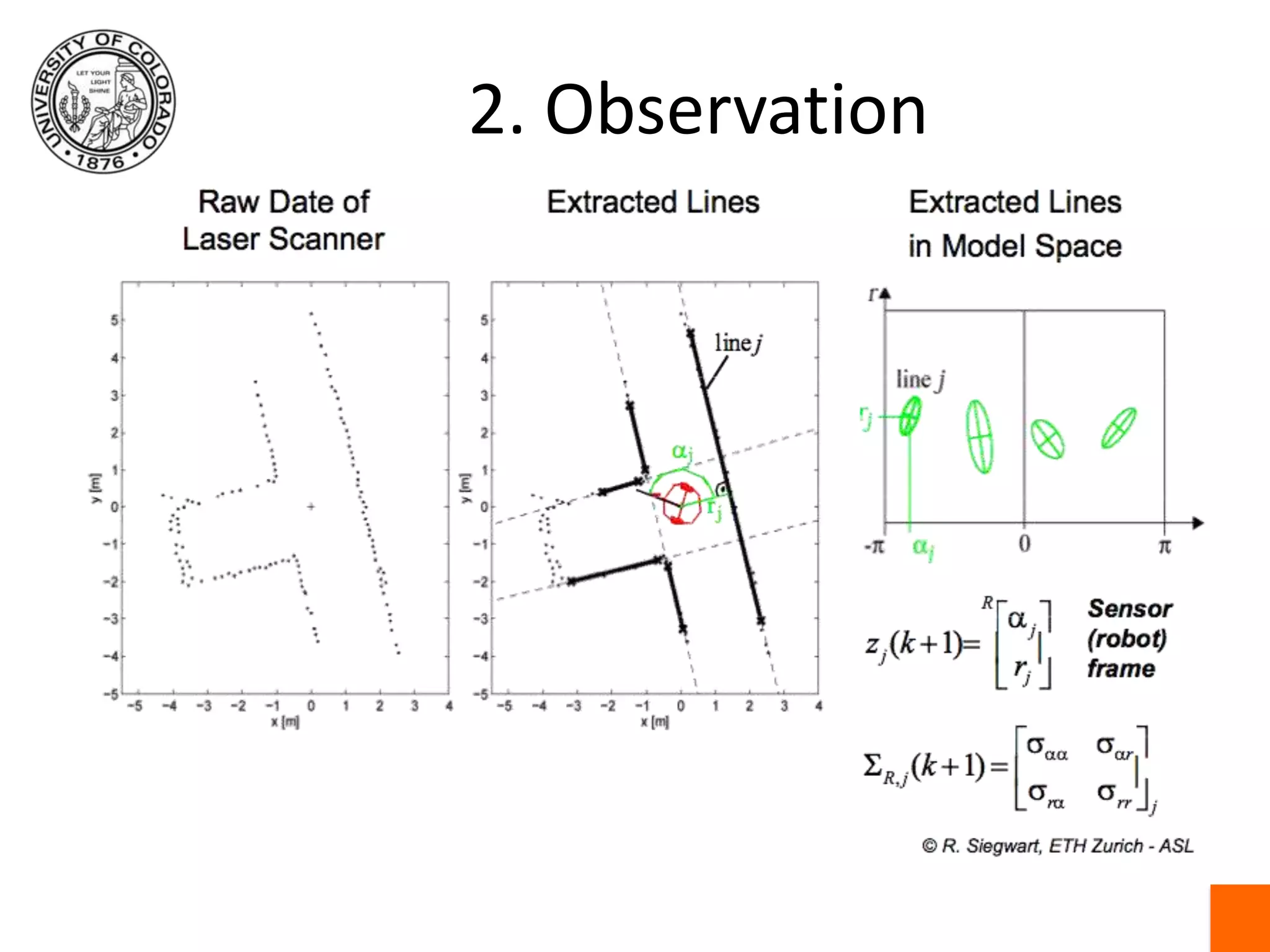
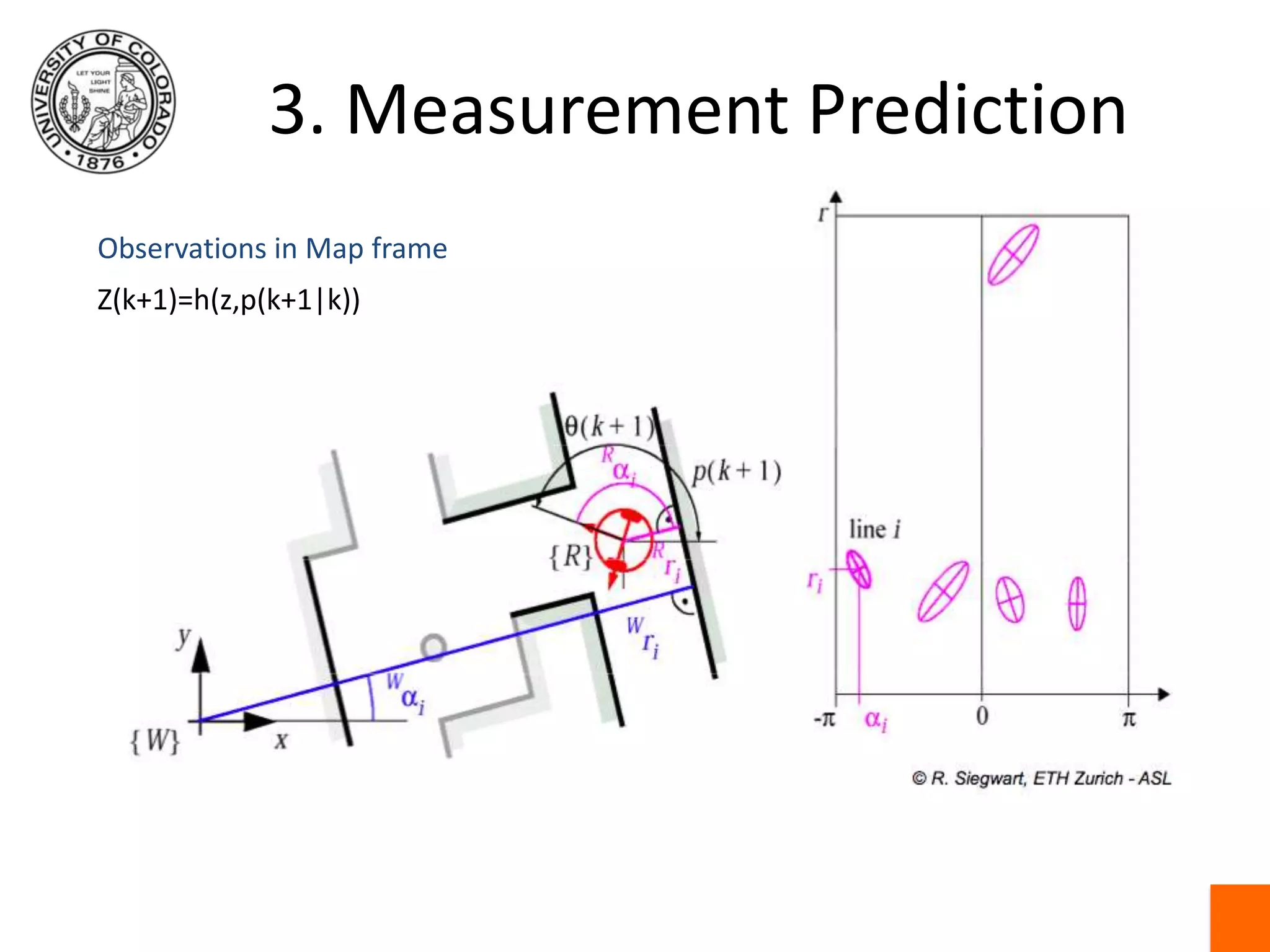
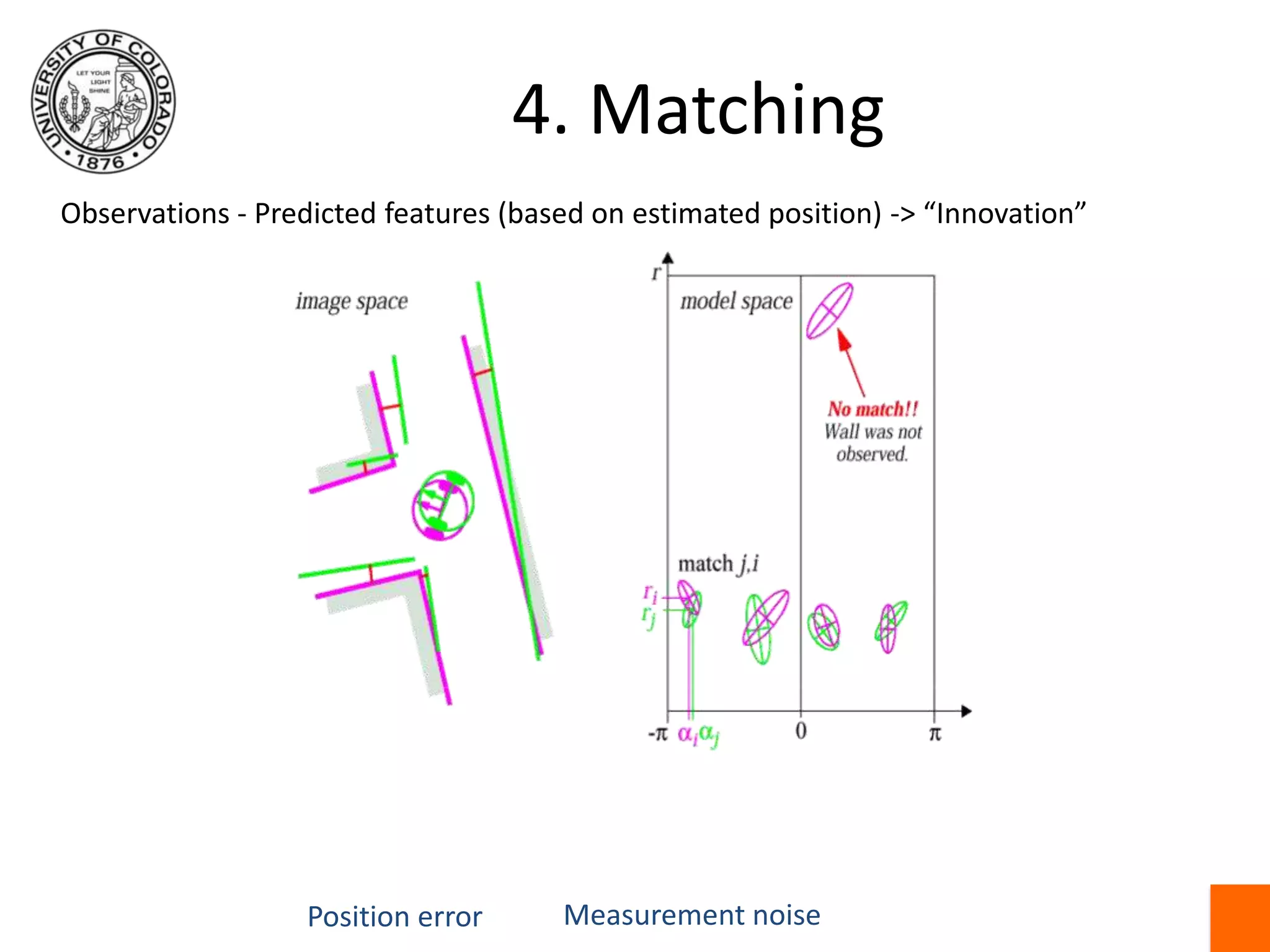
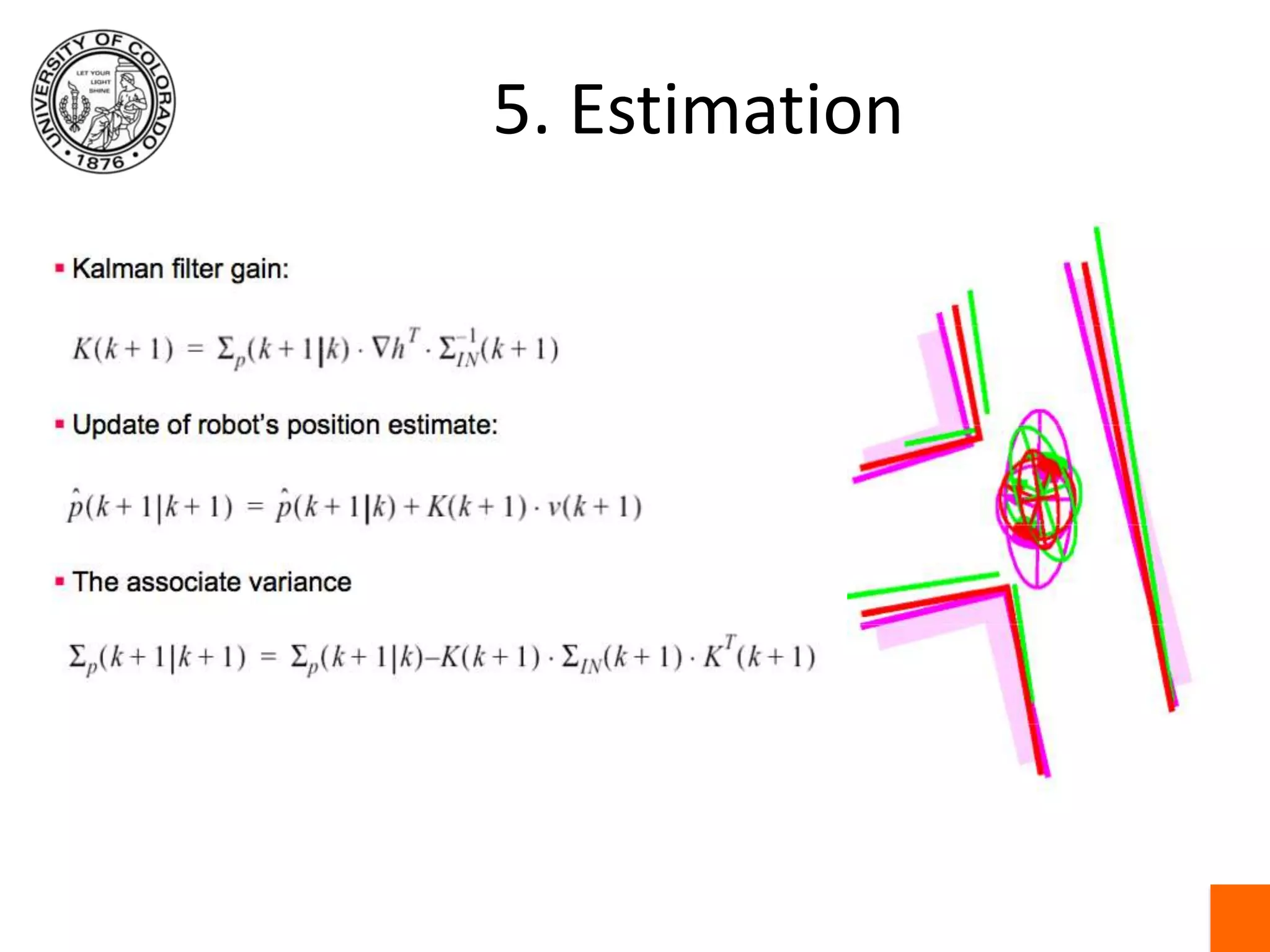
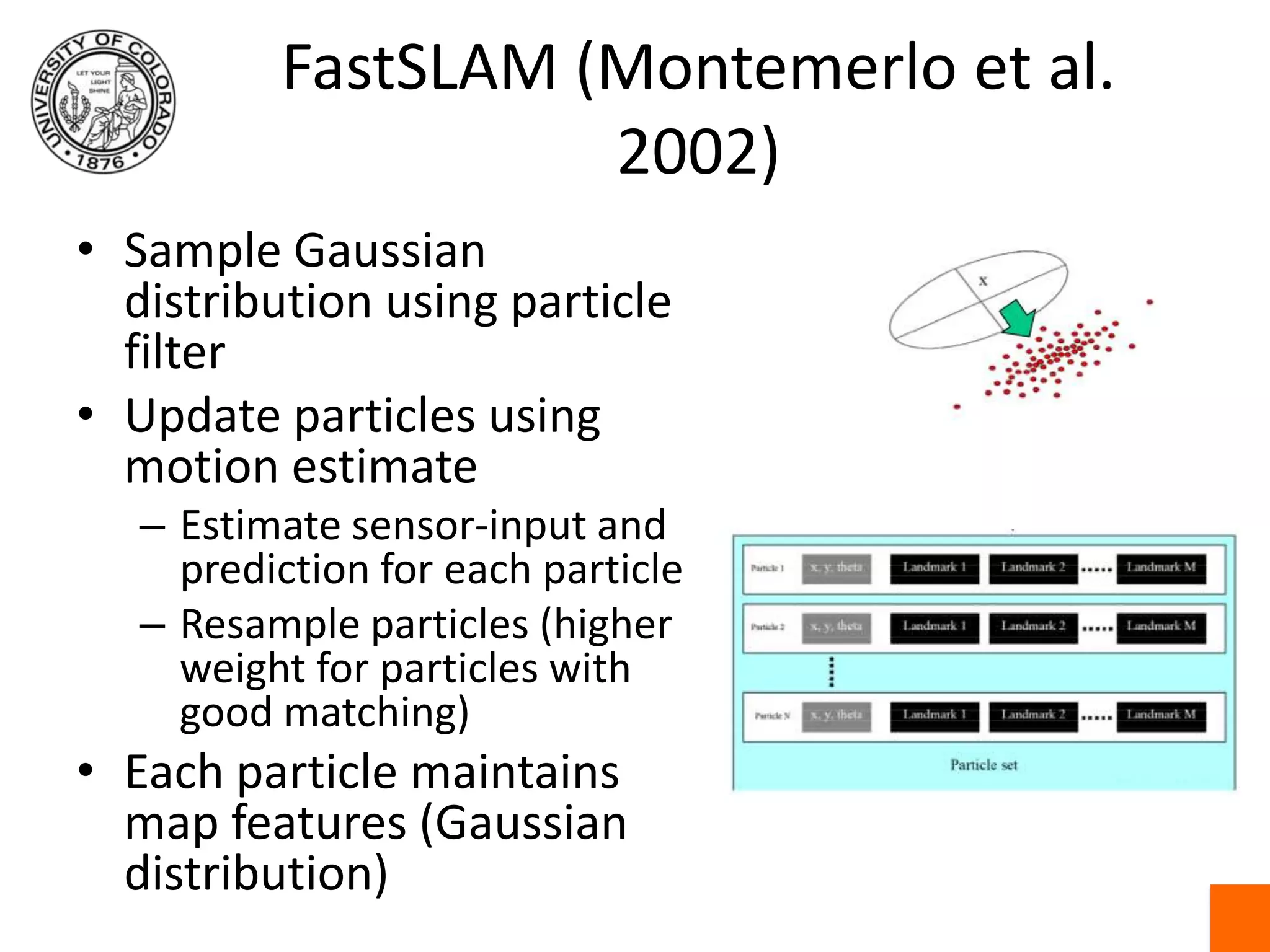
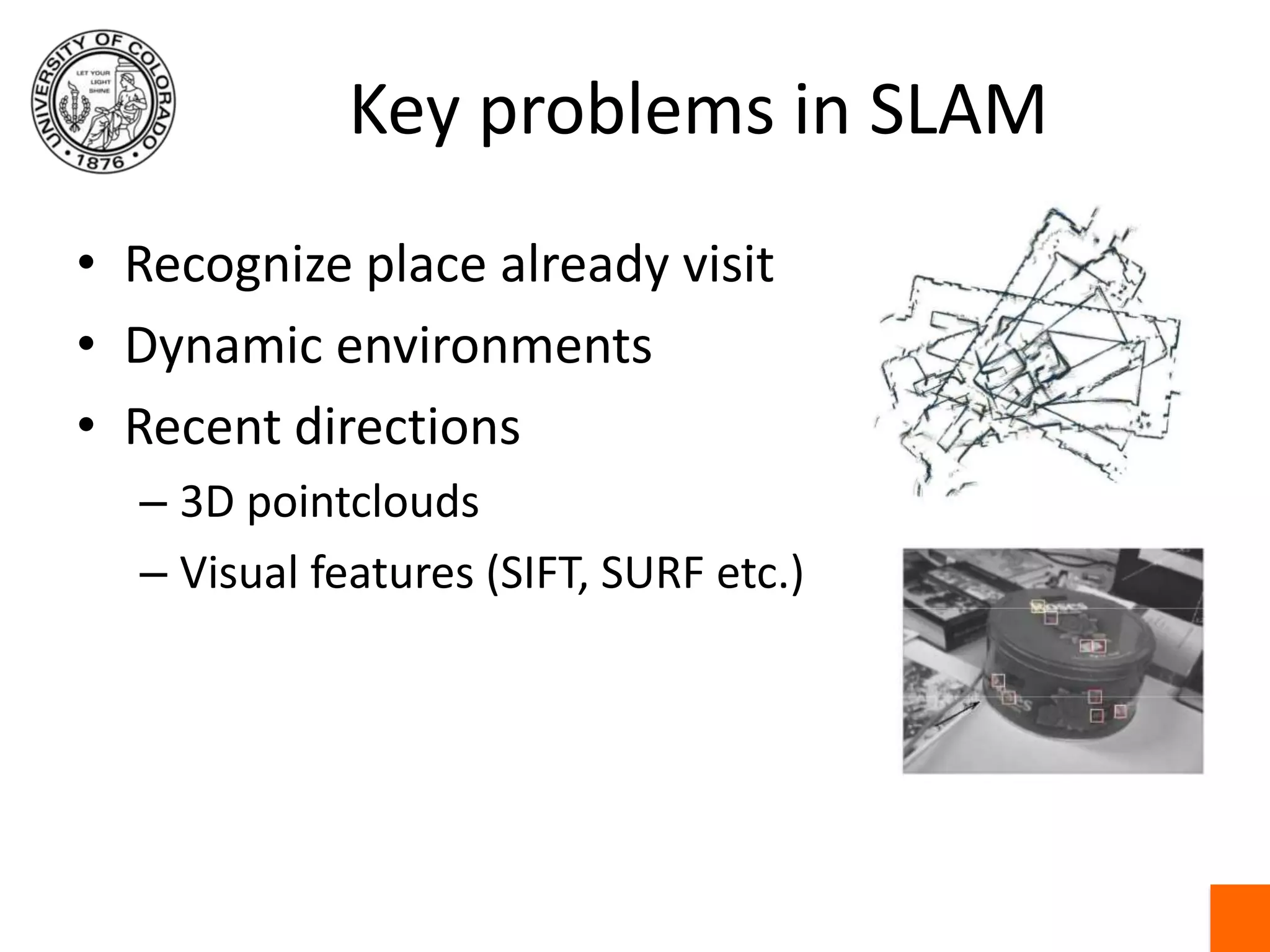
This document provides an overview of localization and mapping techniques for robotics, including: - Markov localization and particle filters for estimating robot location as a probability distribution. - The Kalman filter for optimally fusing uncertain sensor measurements and updating location estimates. - Simultaneous localization and mapping (SLAM) and the "hen-egg" problem of needing a map to localize and a location to build a map. - Feature-based SLAM approaches that build maps from distinct environmental features. - FastSLAM which uses a particle filter to estimate robot location and build maps from sensor measurements. - Key challenges in SLAM like recognizing previously visited places and handling dynamic environments.