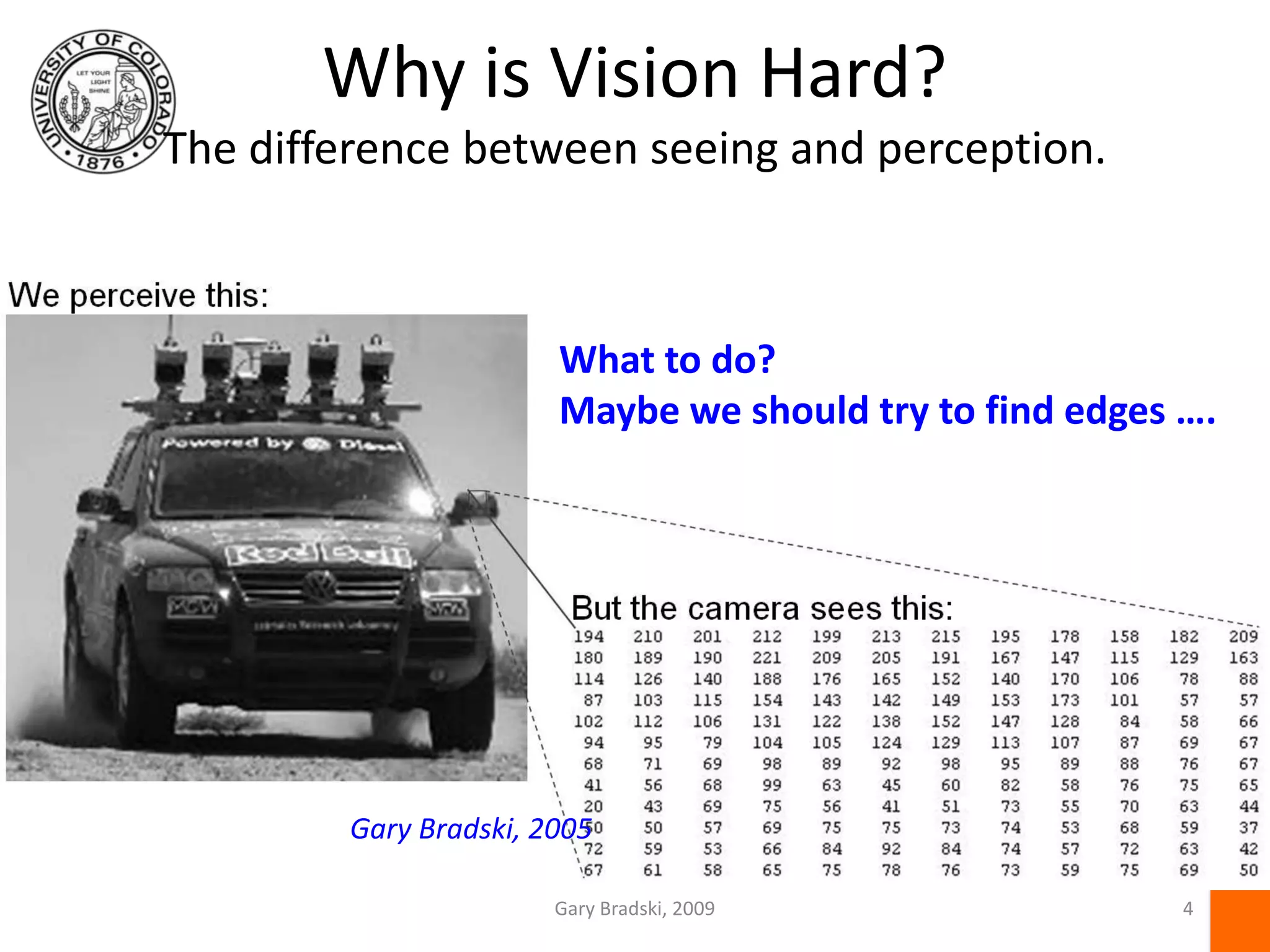
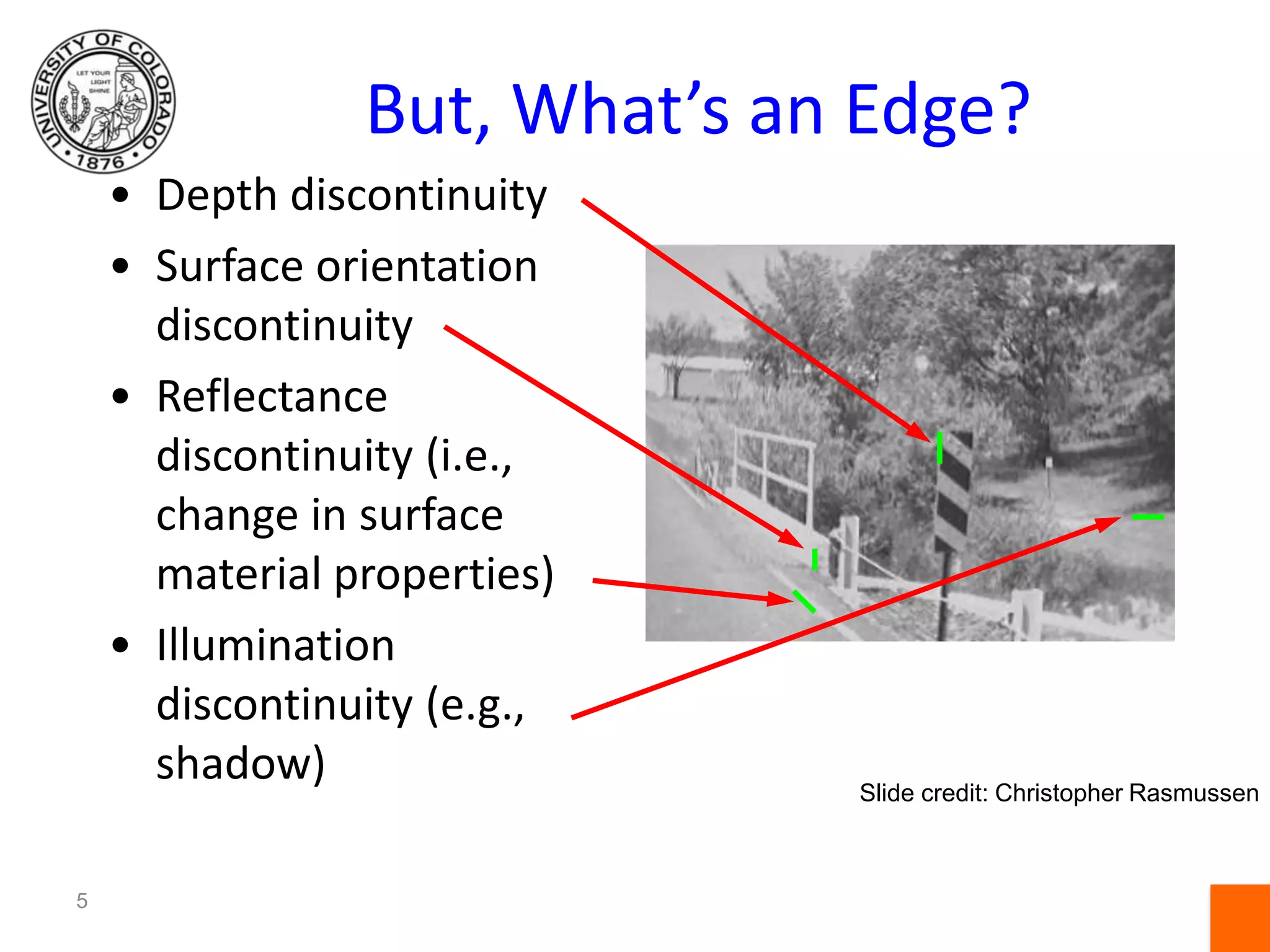
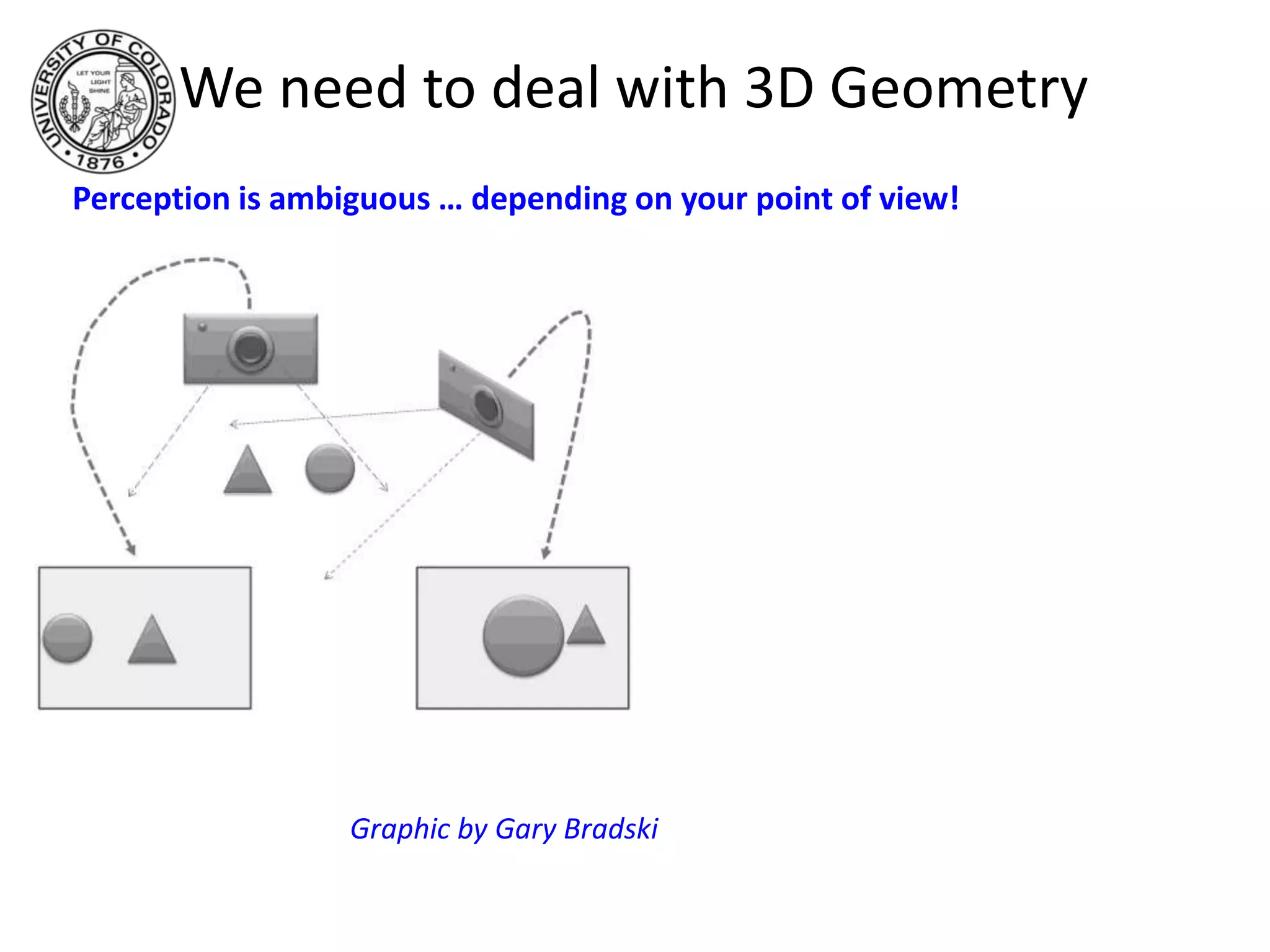
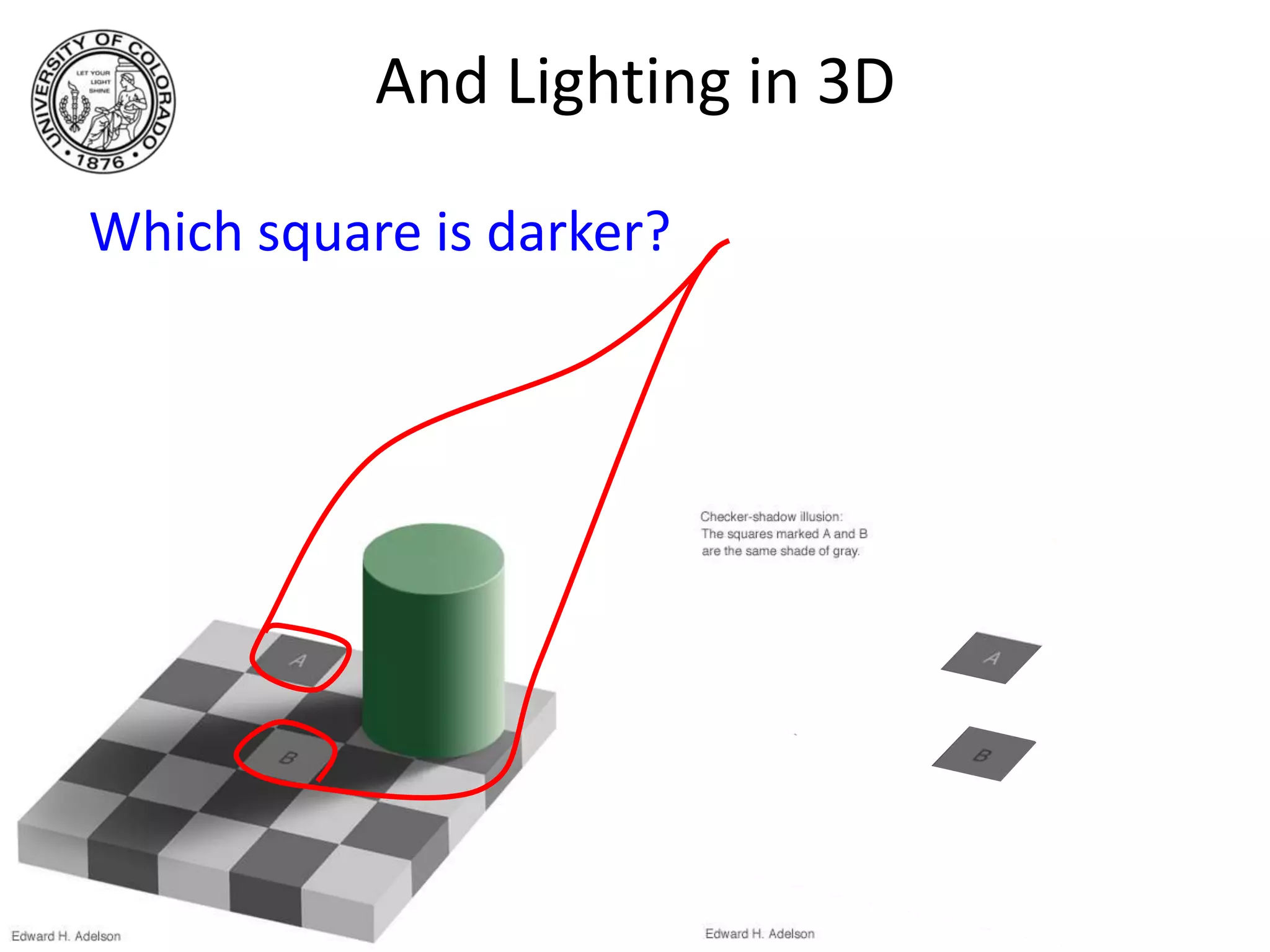
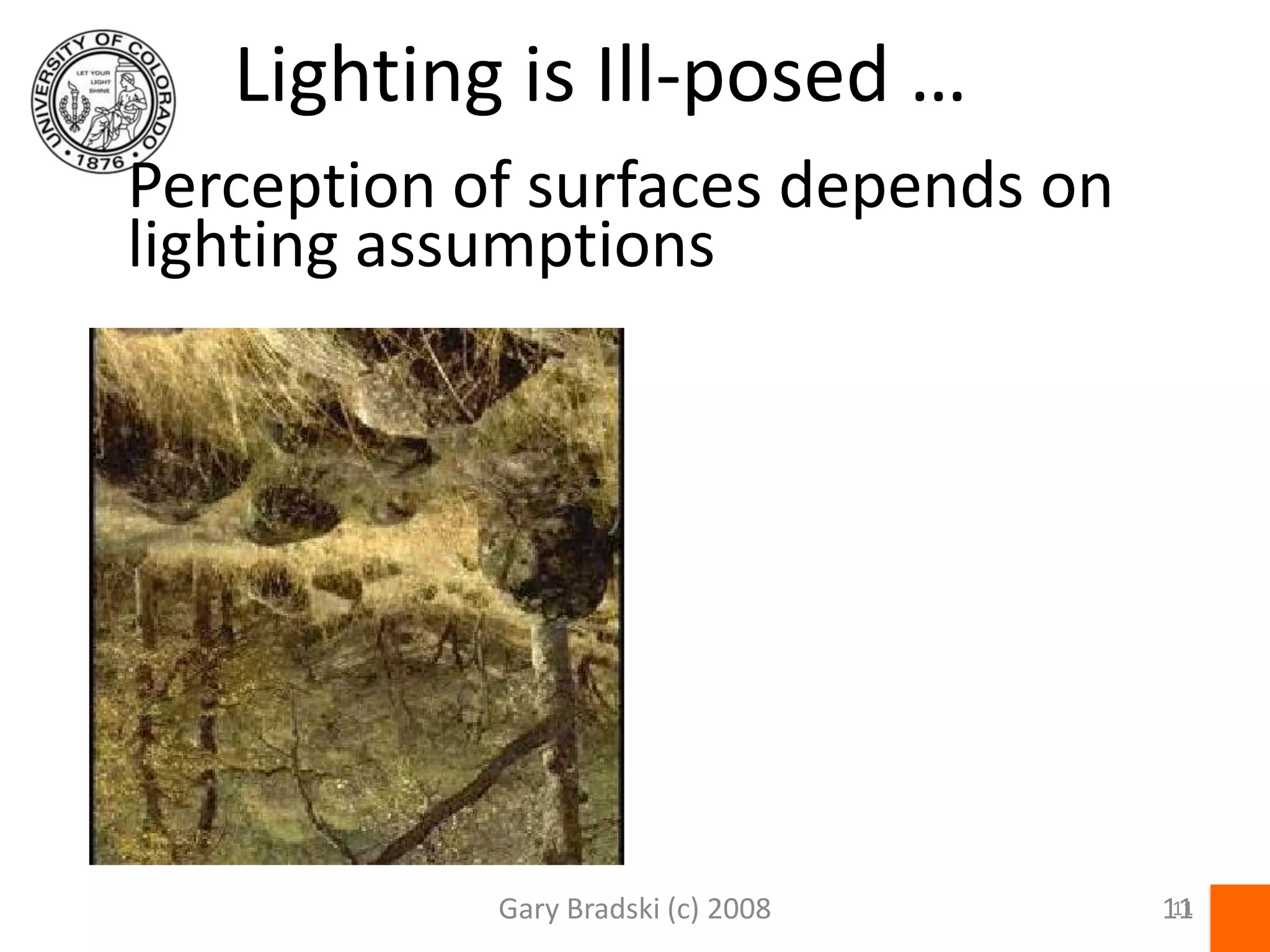
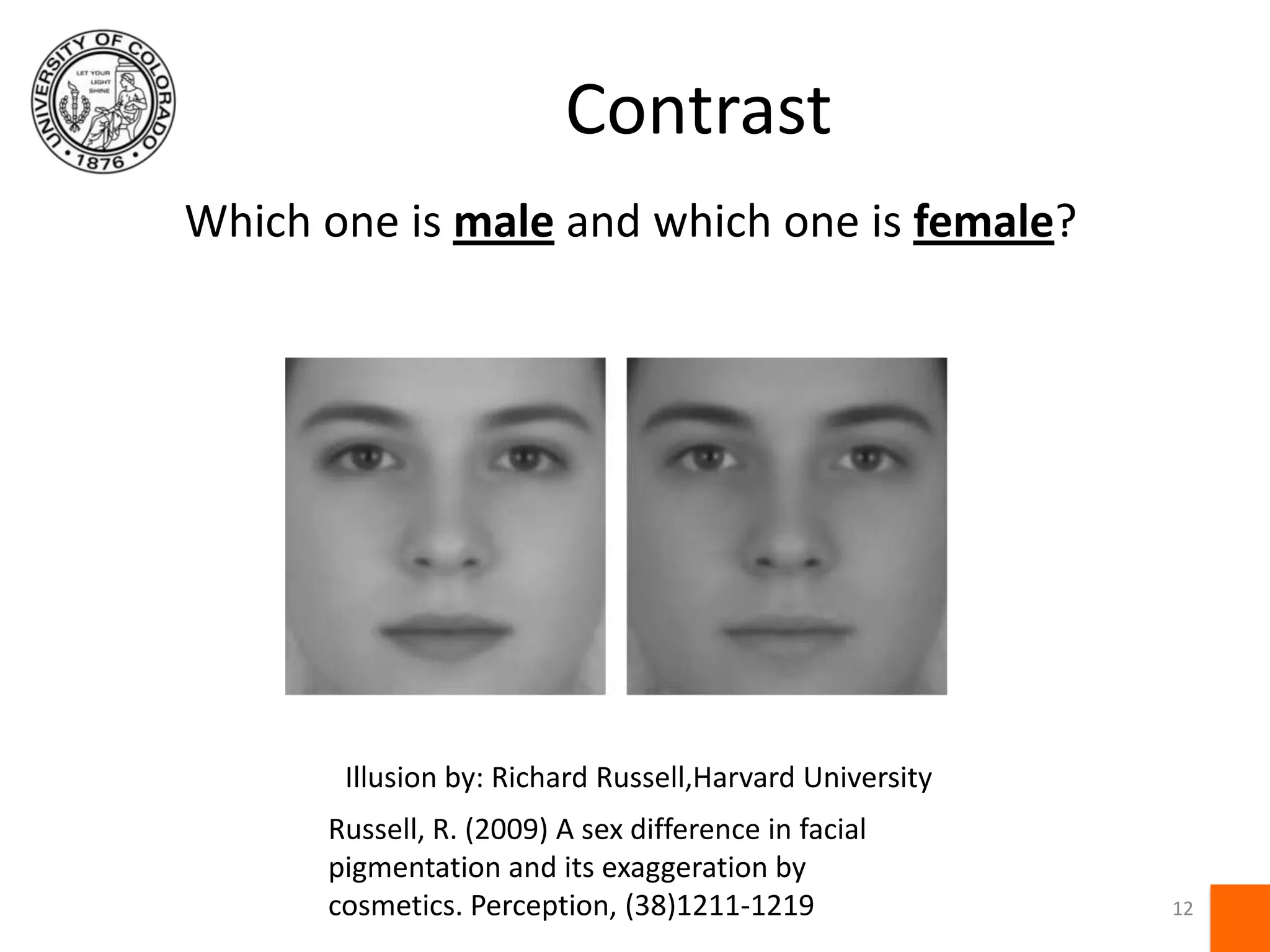
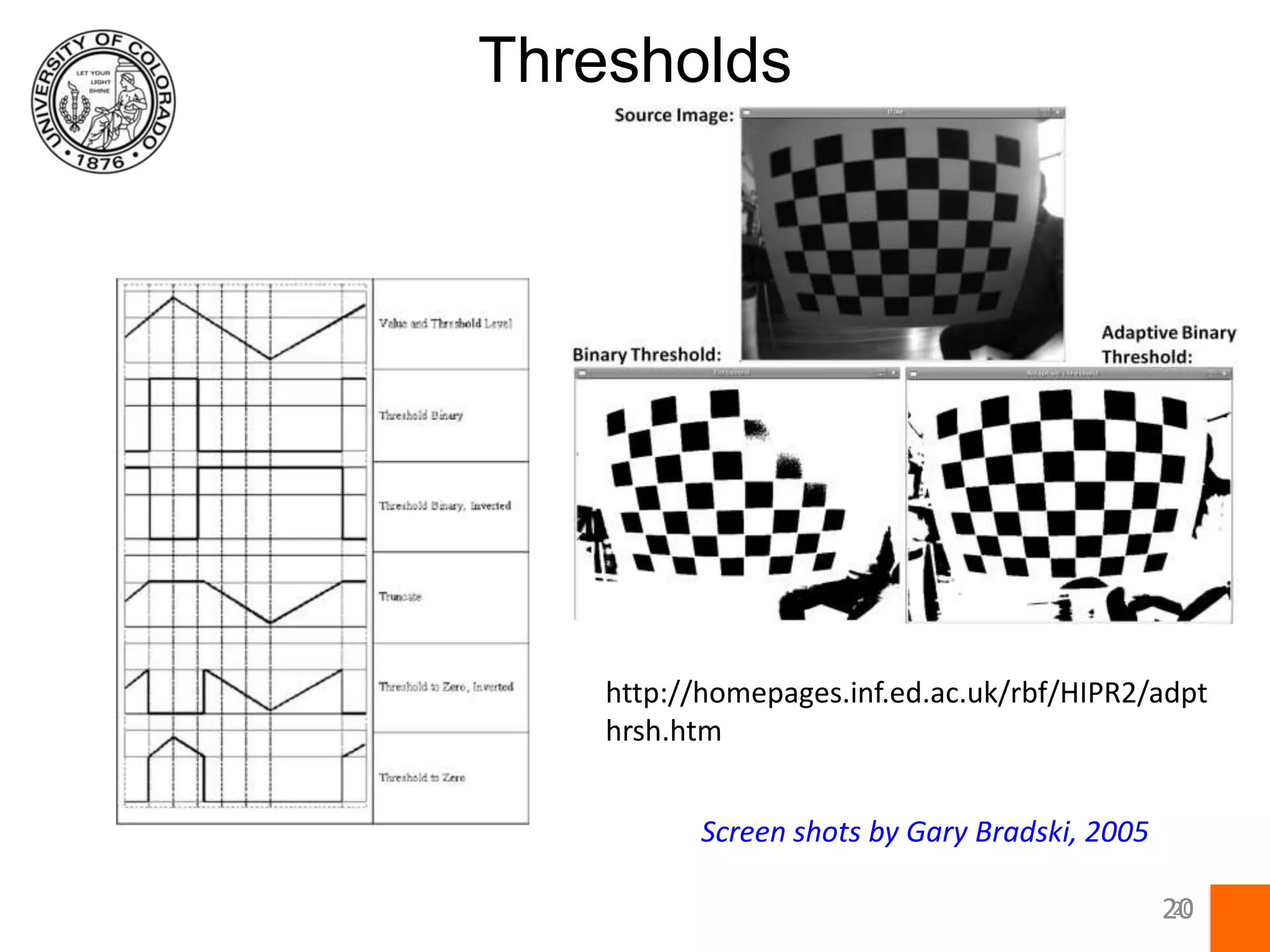
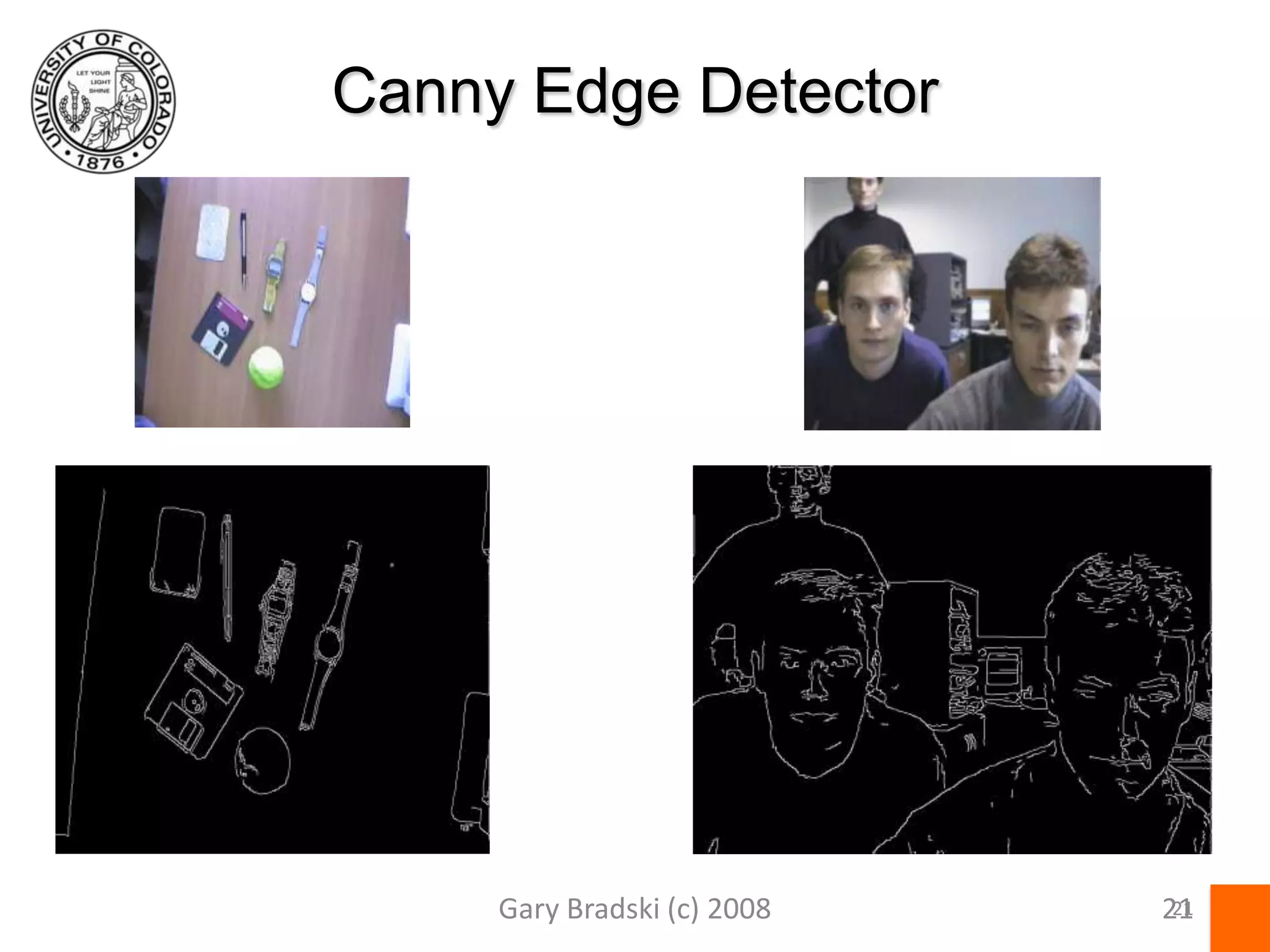
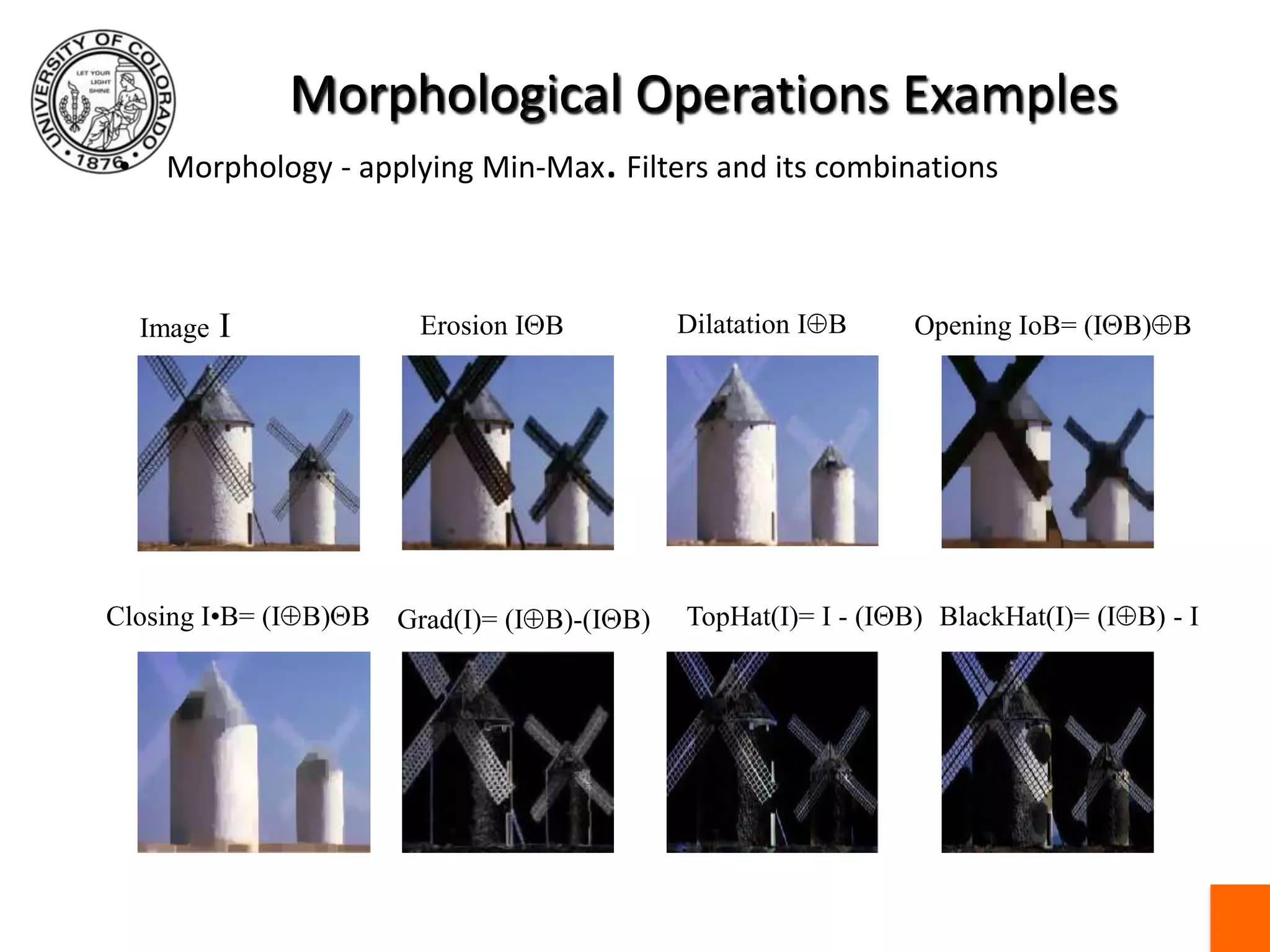
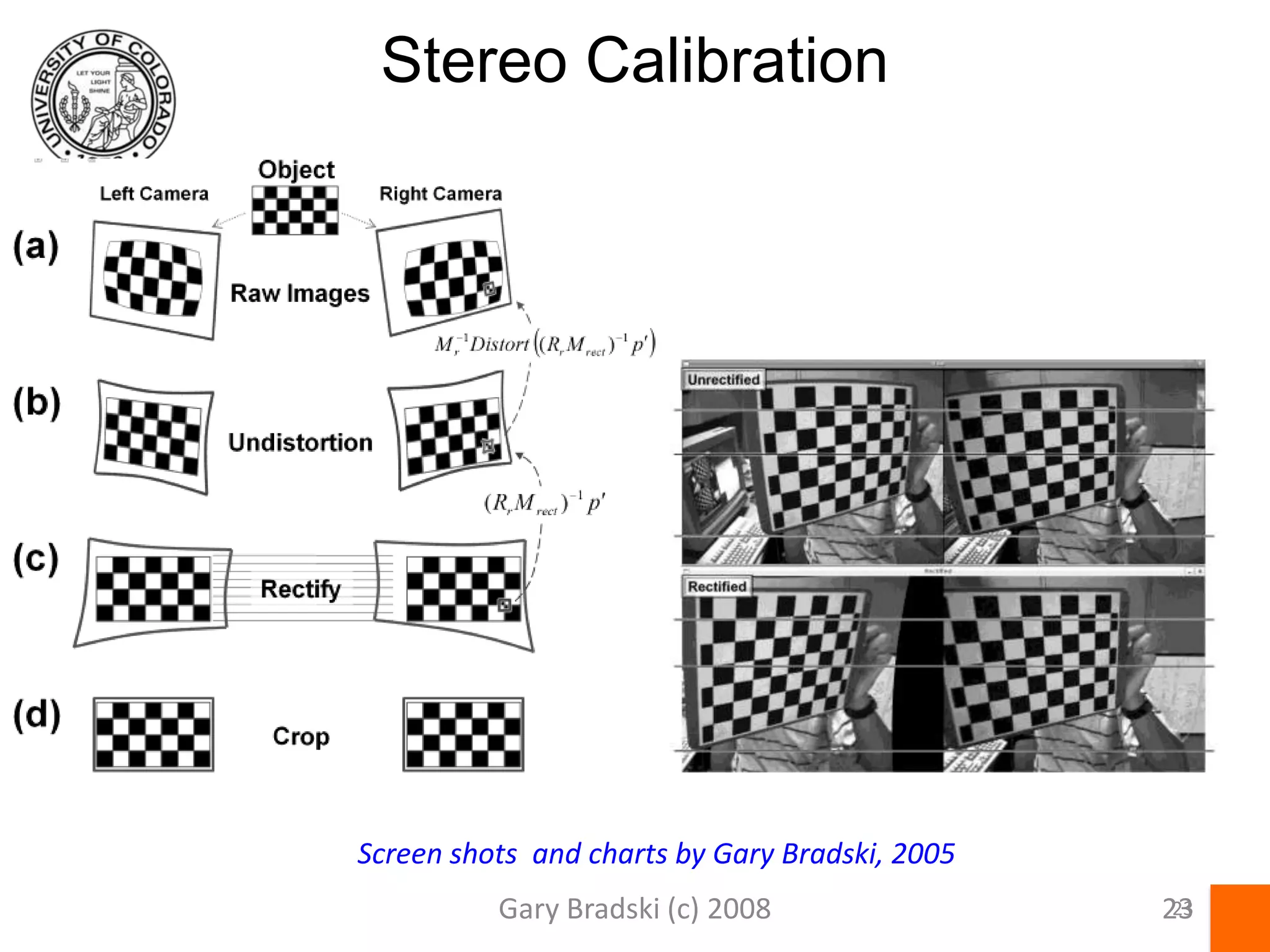
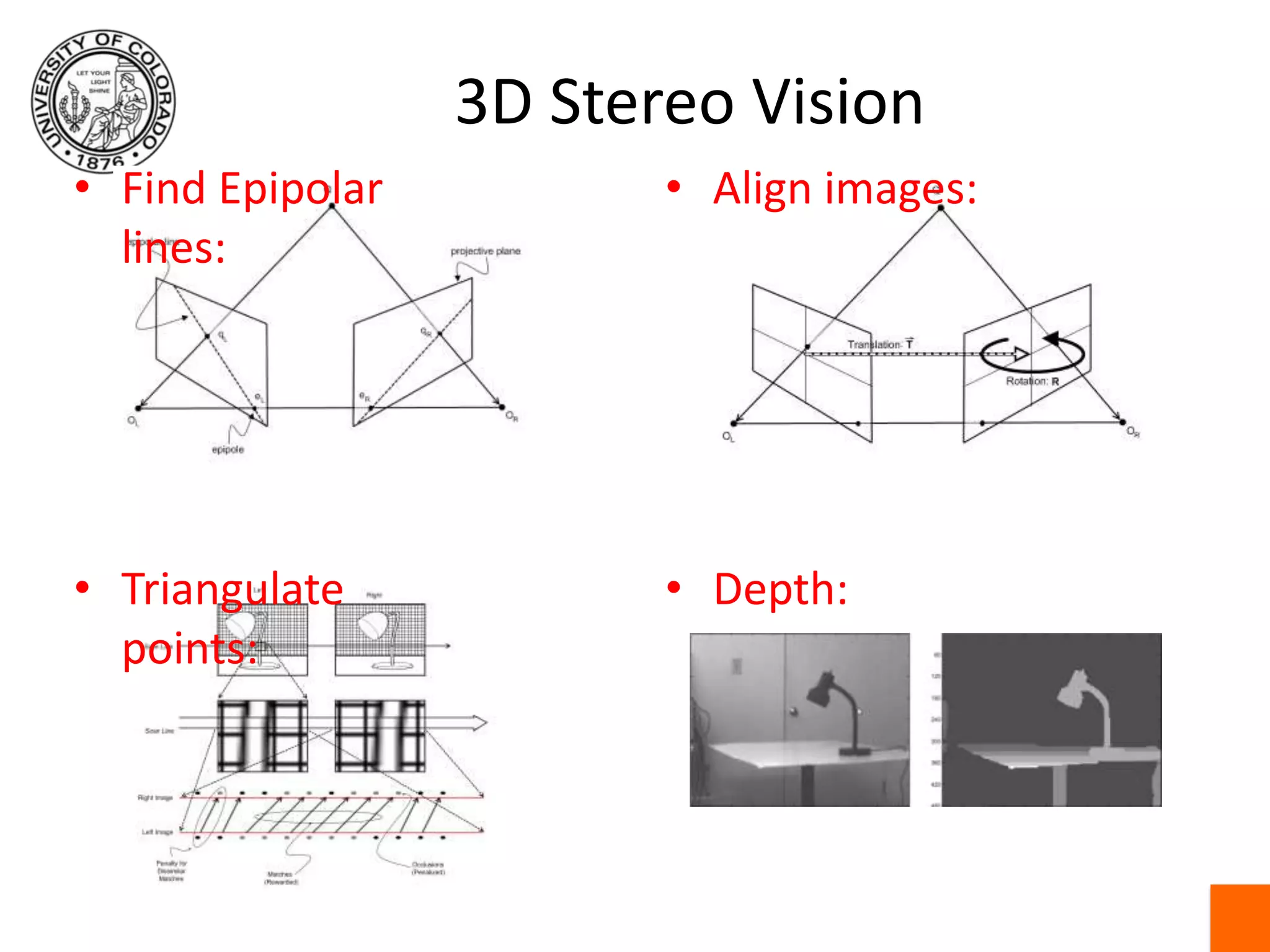
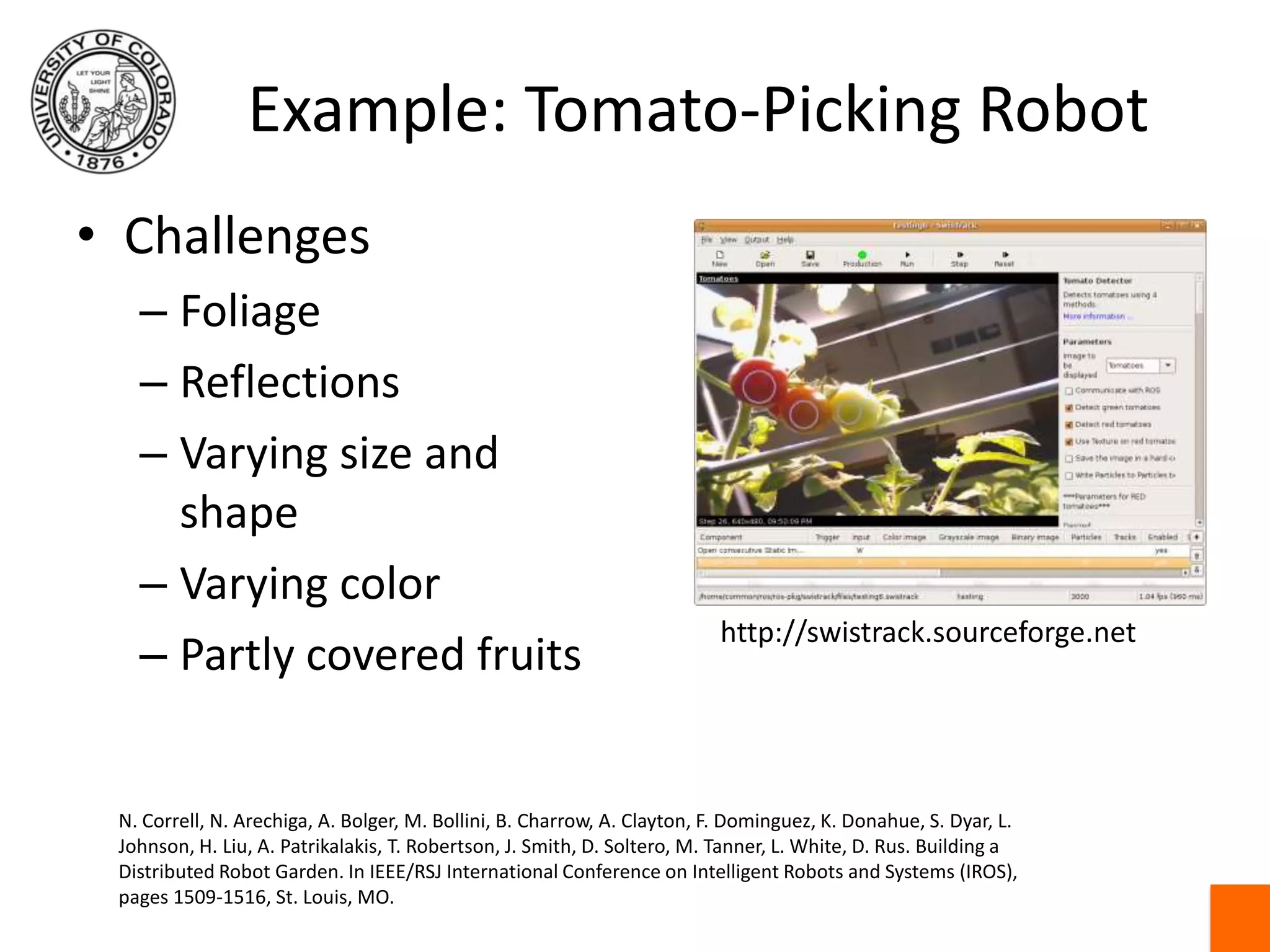
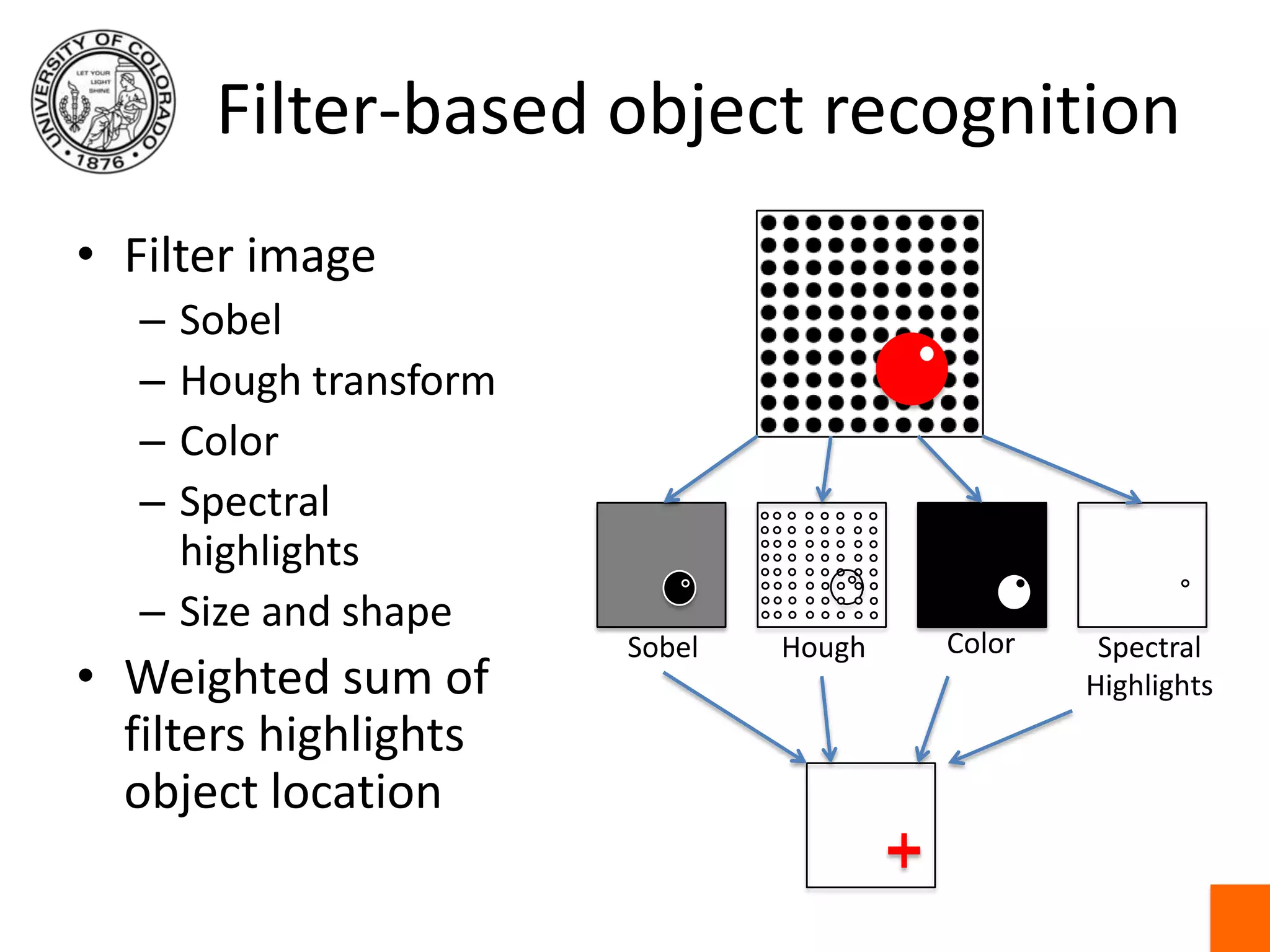
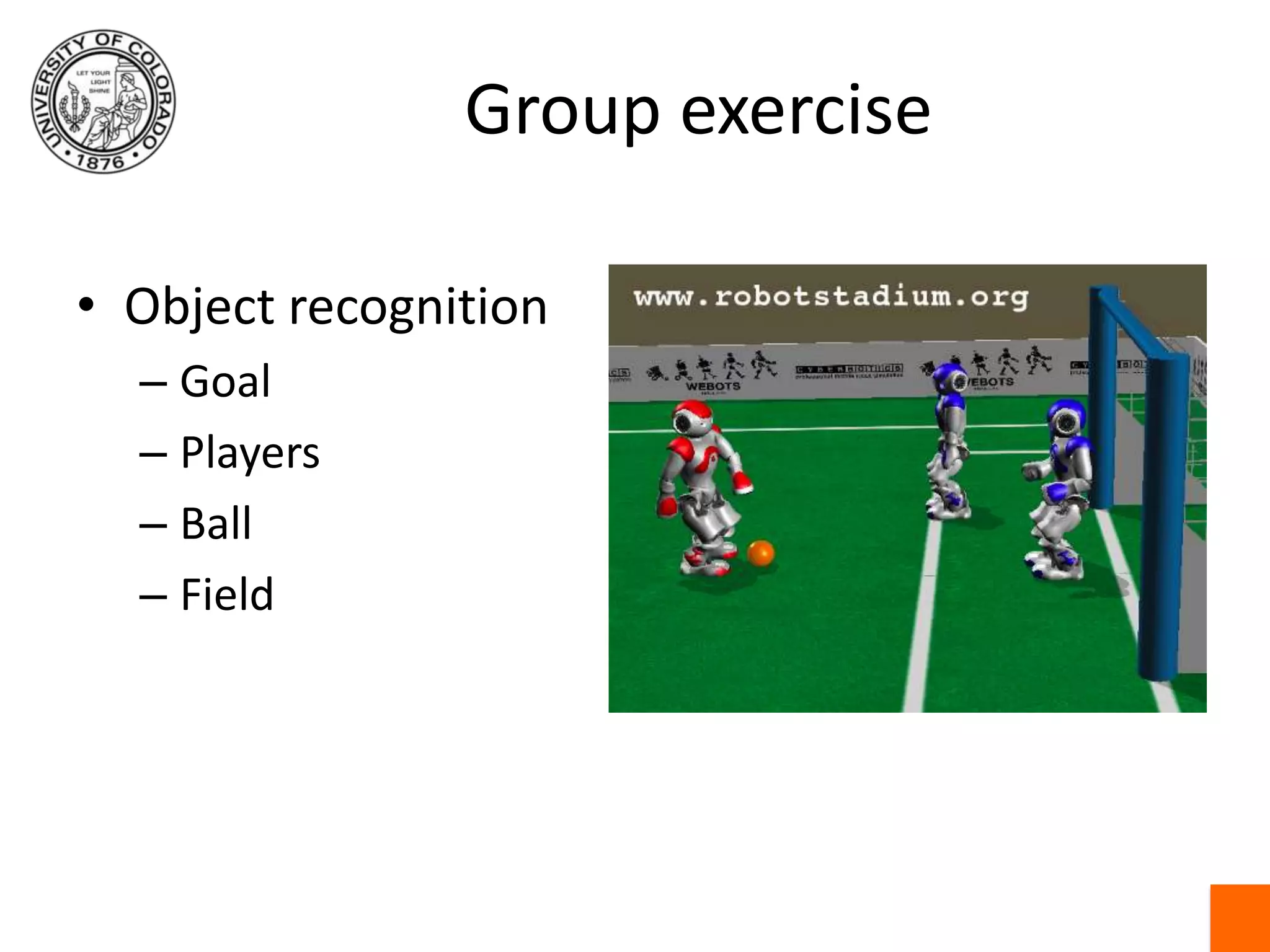
Vision is a challenging task for robots due to various ambiguities, including: depth discontinuities, surface orientation changes, reflectance changes, illumination changes, and different perspectives. Basic image processing techniques can help with tasks like edge detection, thresholding, morphological operations, and stereo vision calculations, but object recognition still requires combining these techniques with filters tuned to the specific objects. For homework, students should read about these topics and complete a questionnaire.