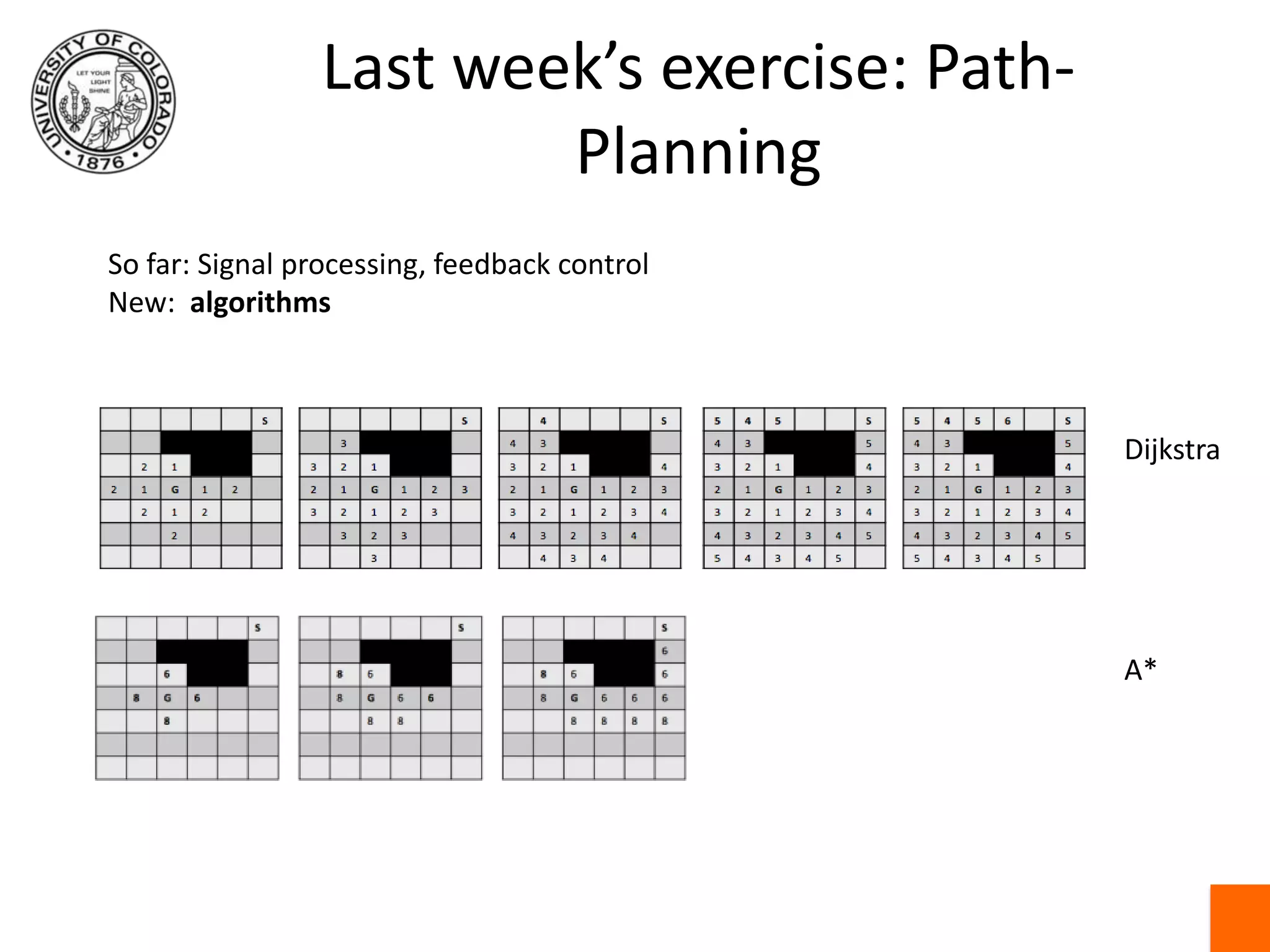
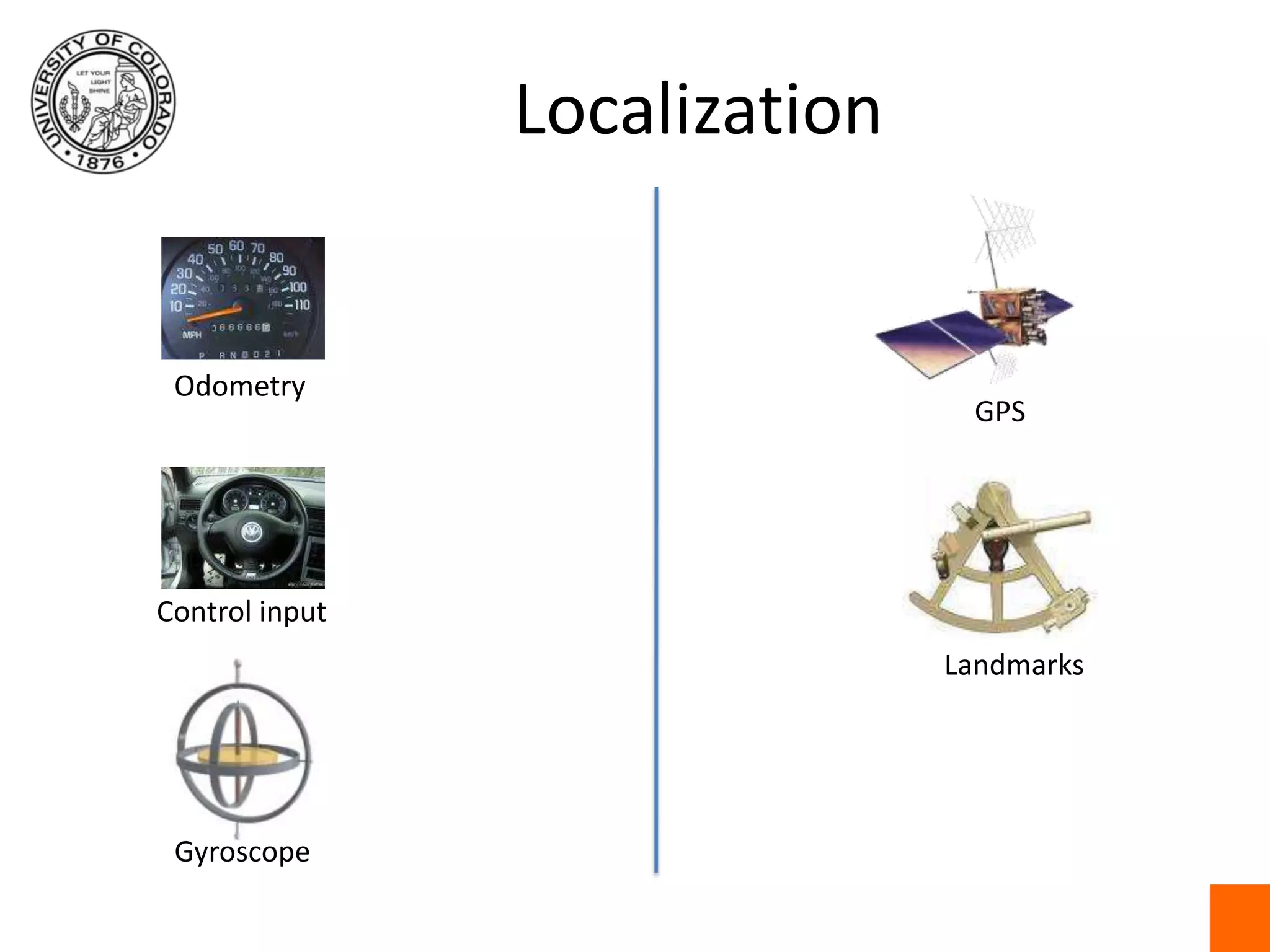
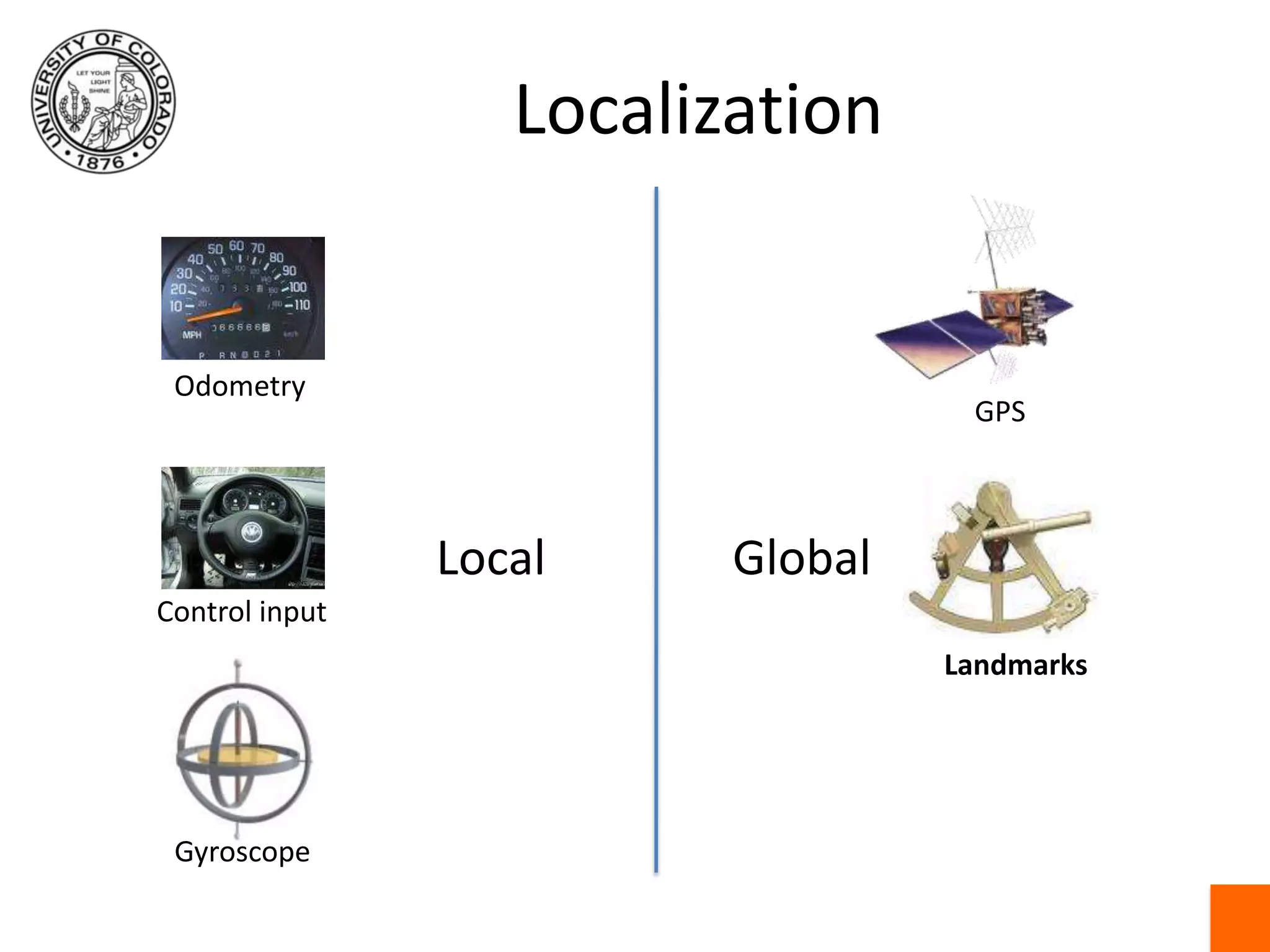
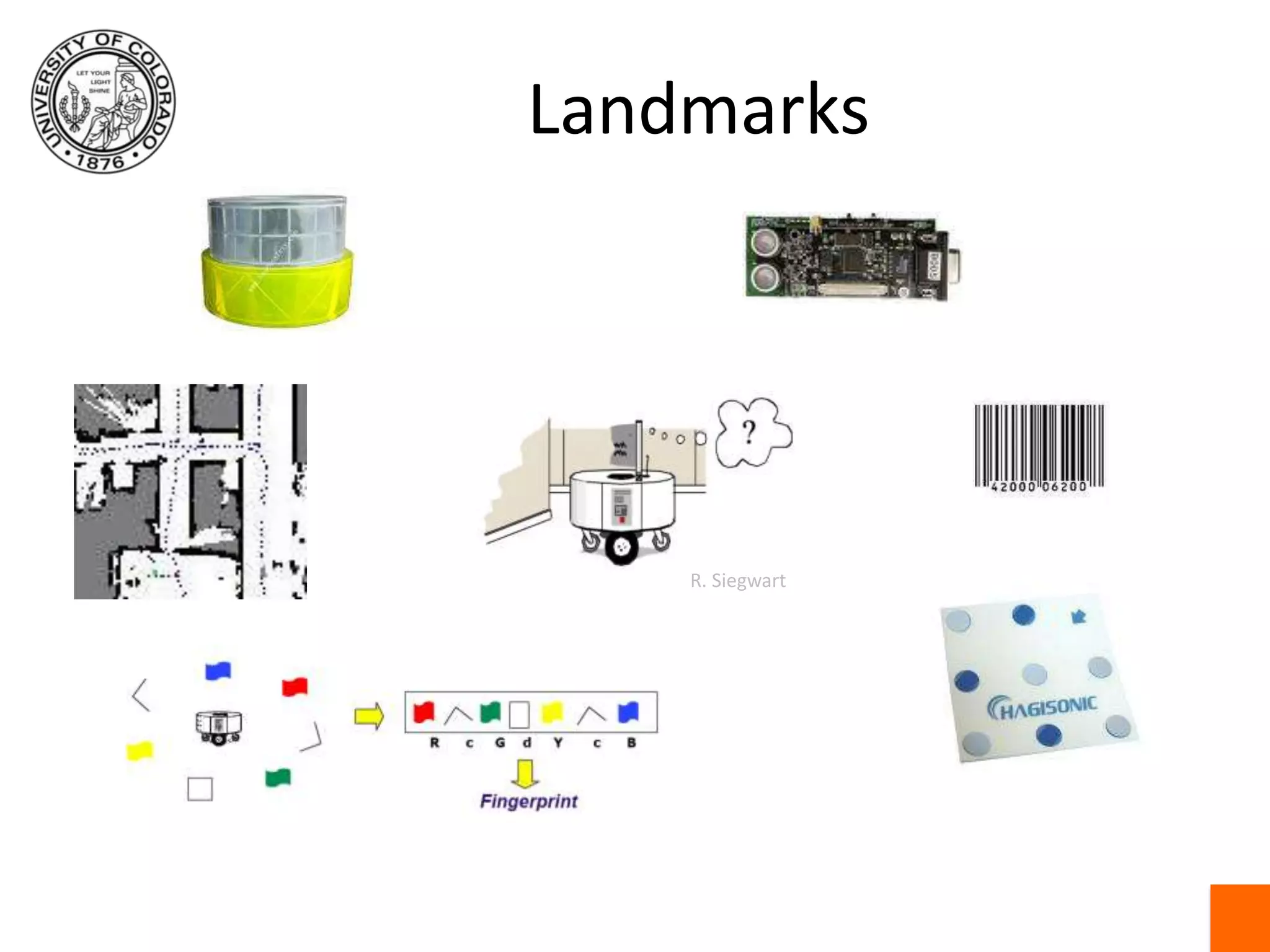
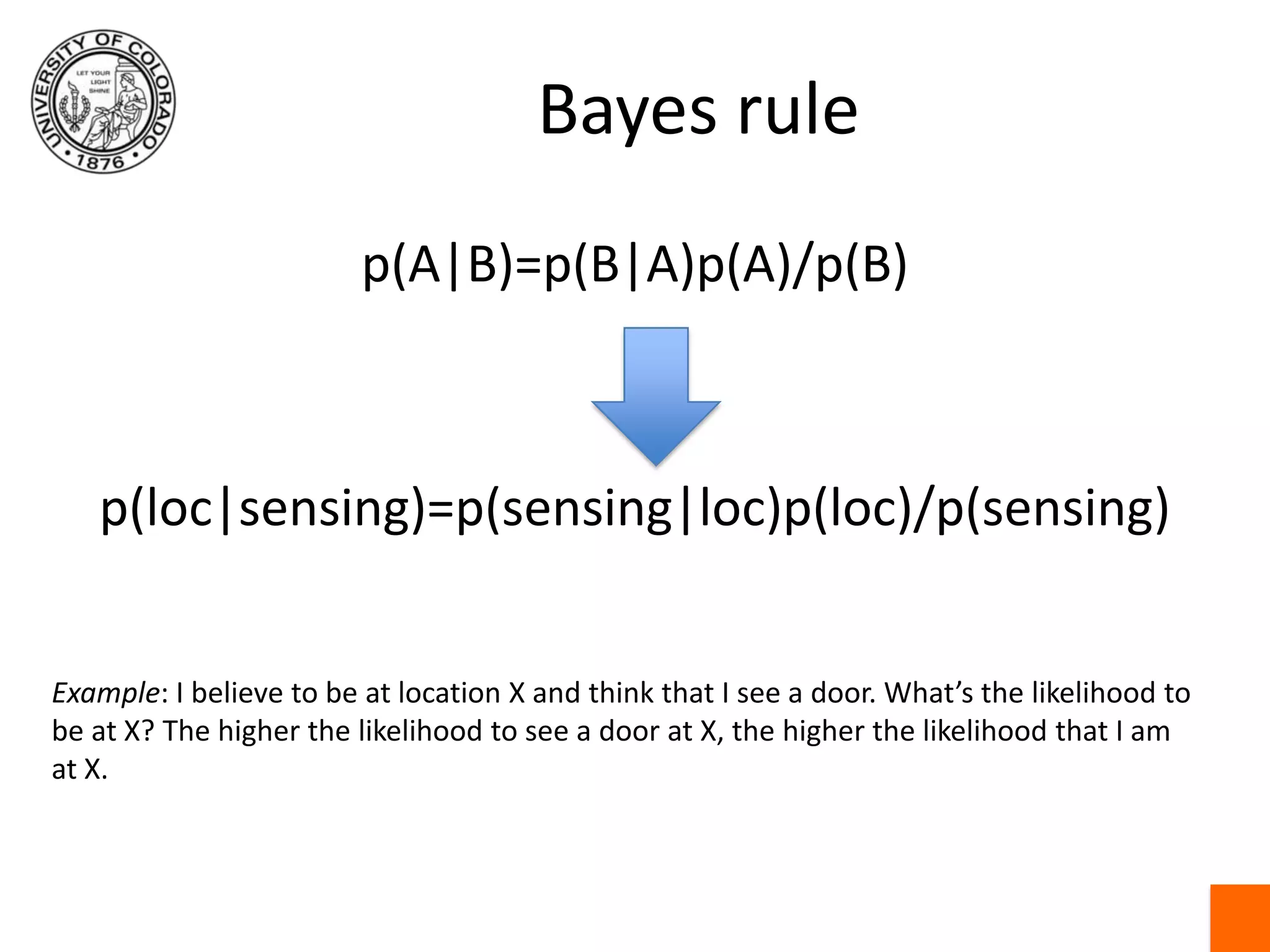
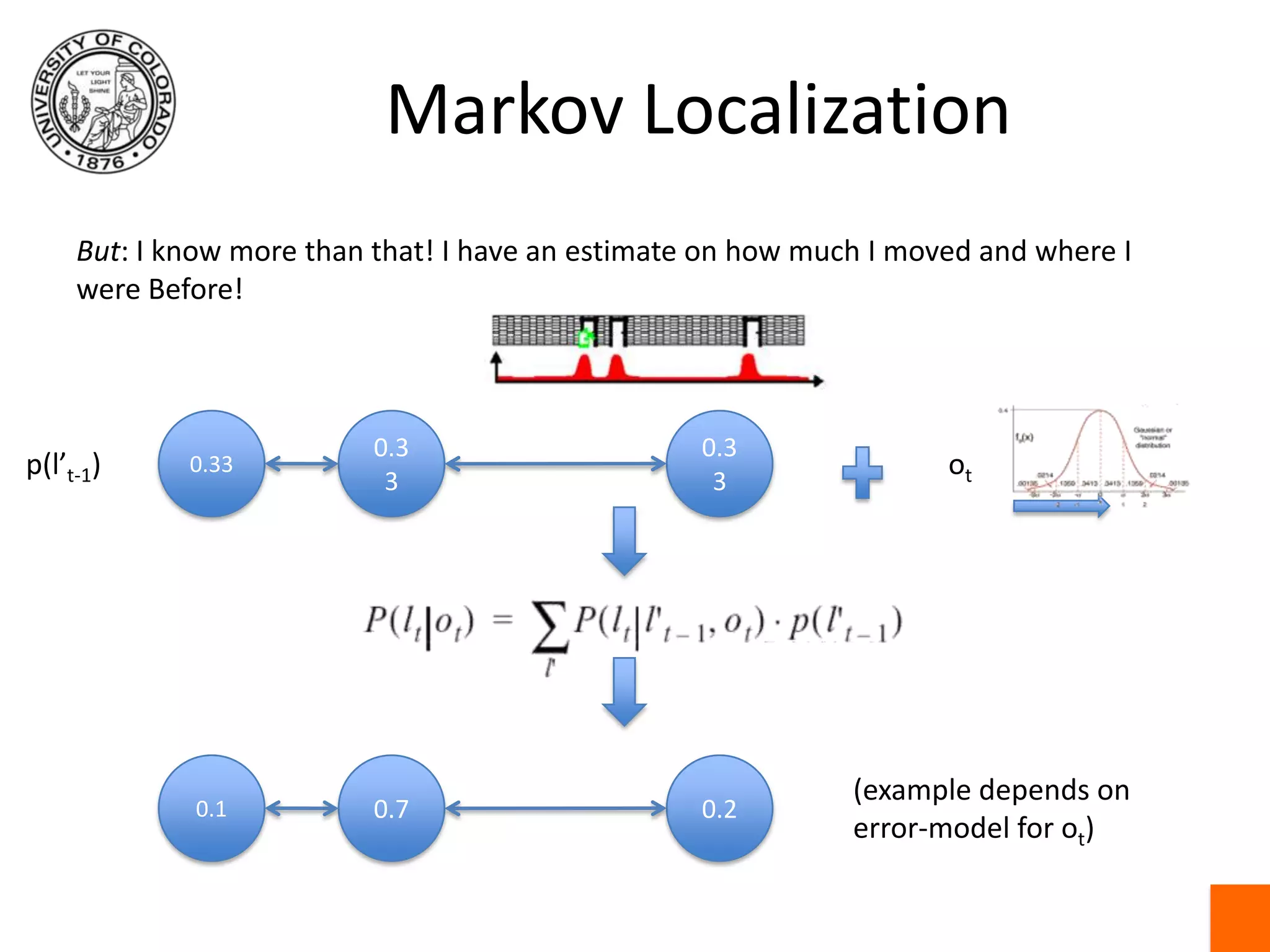
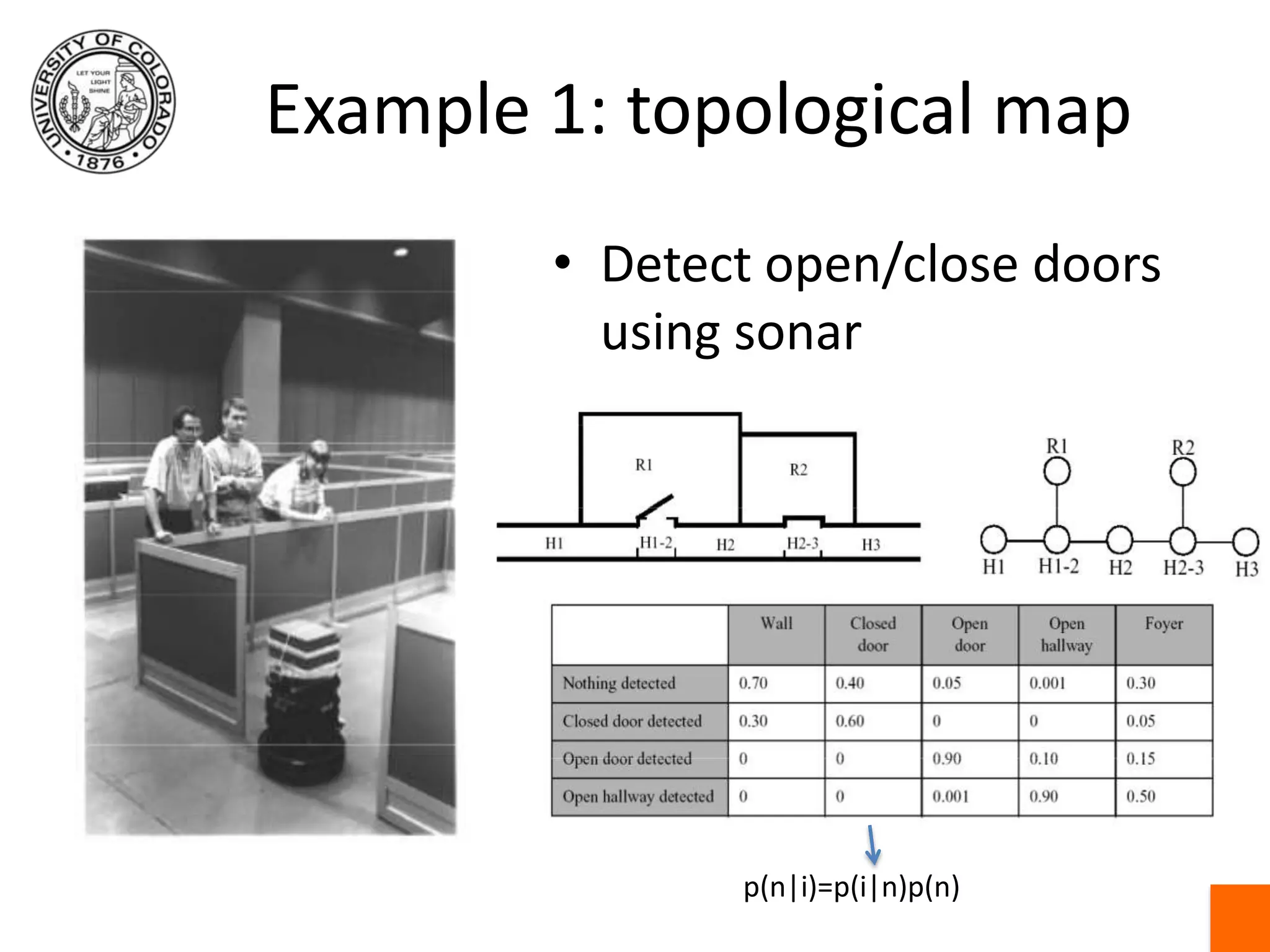
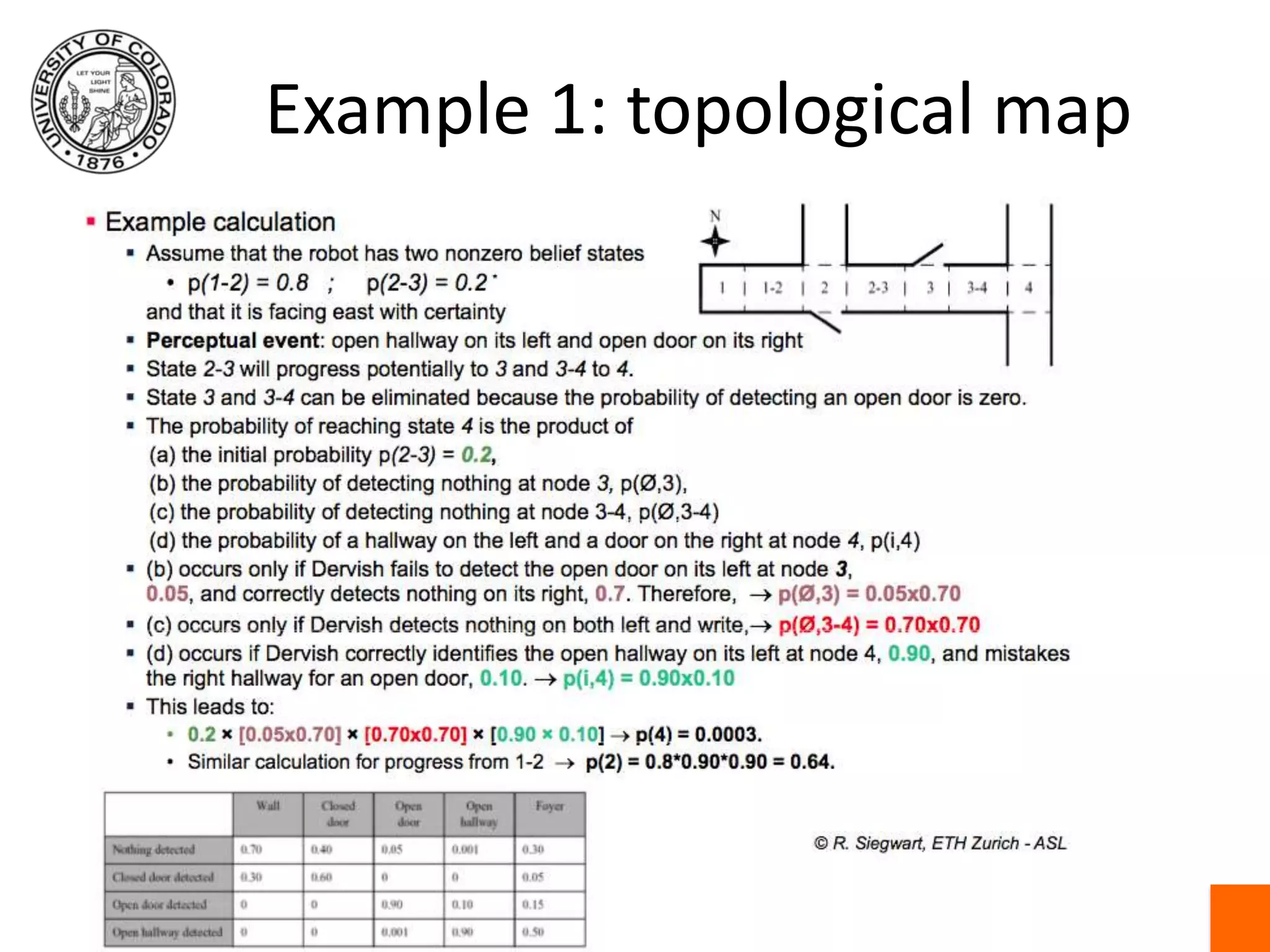
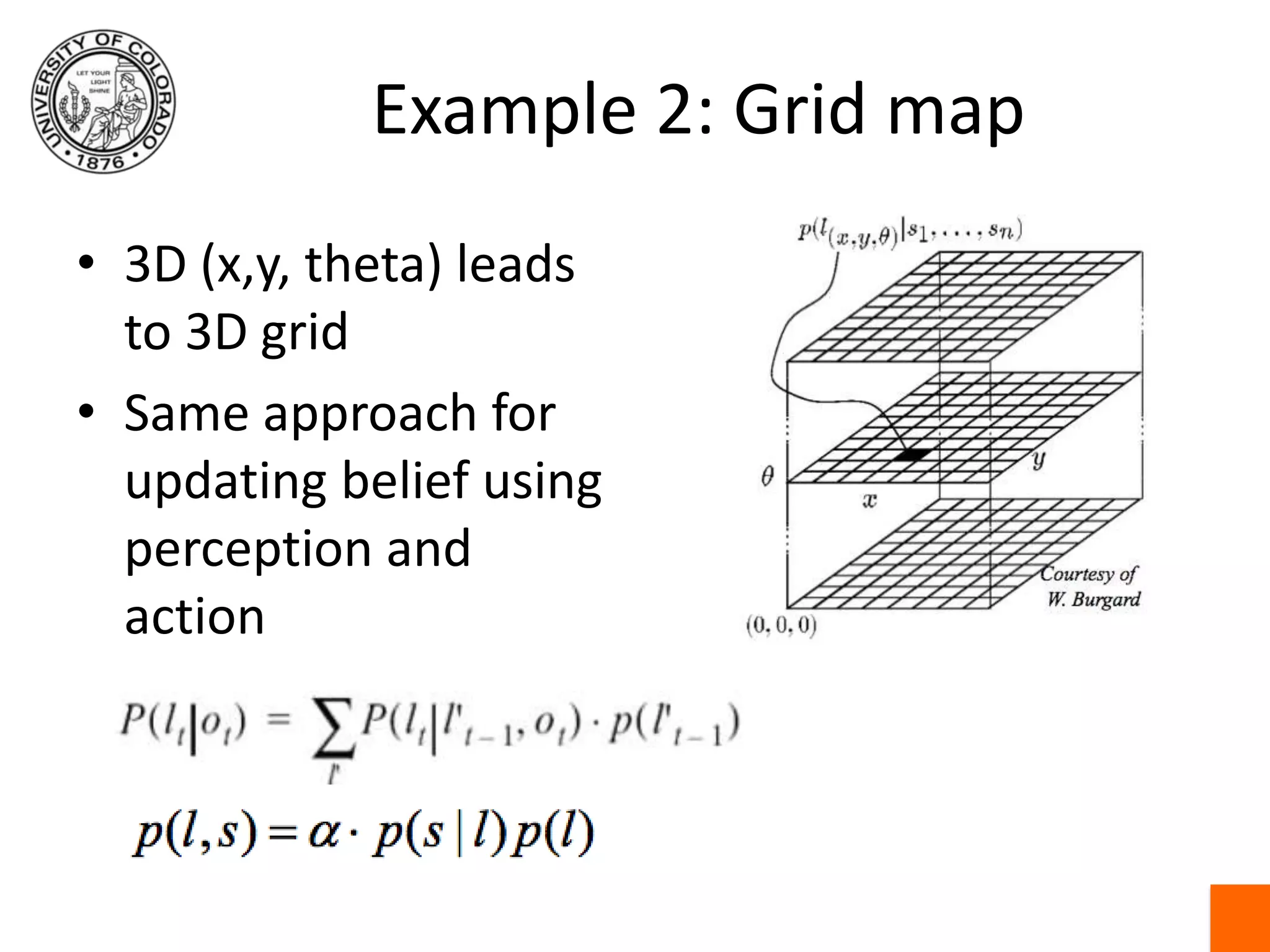
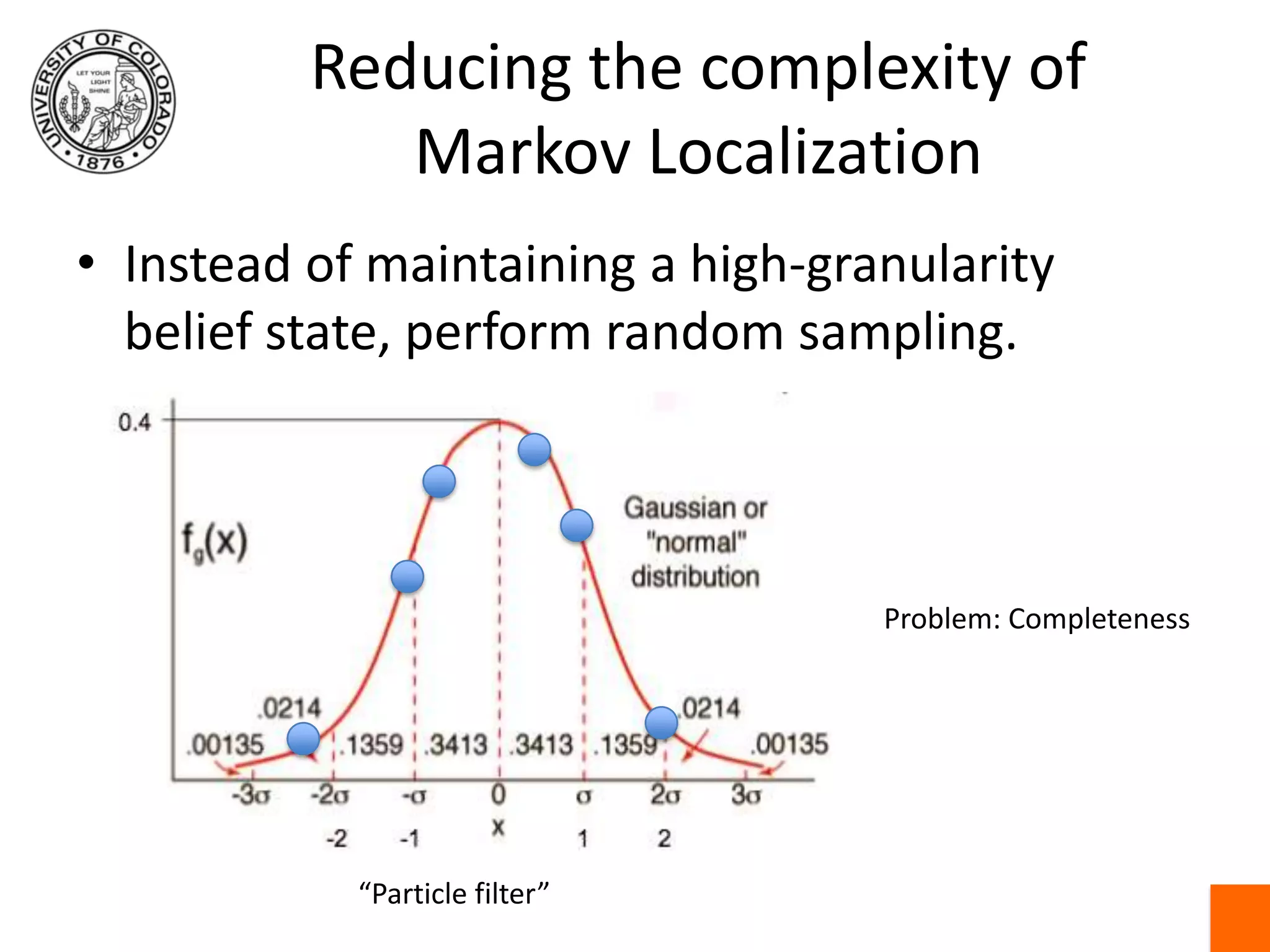
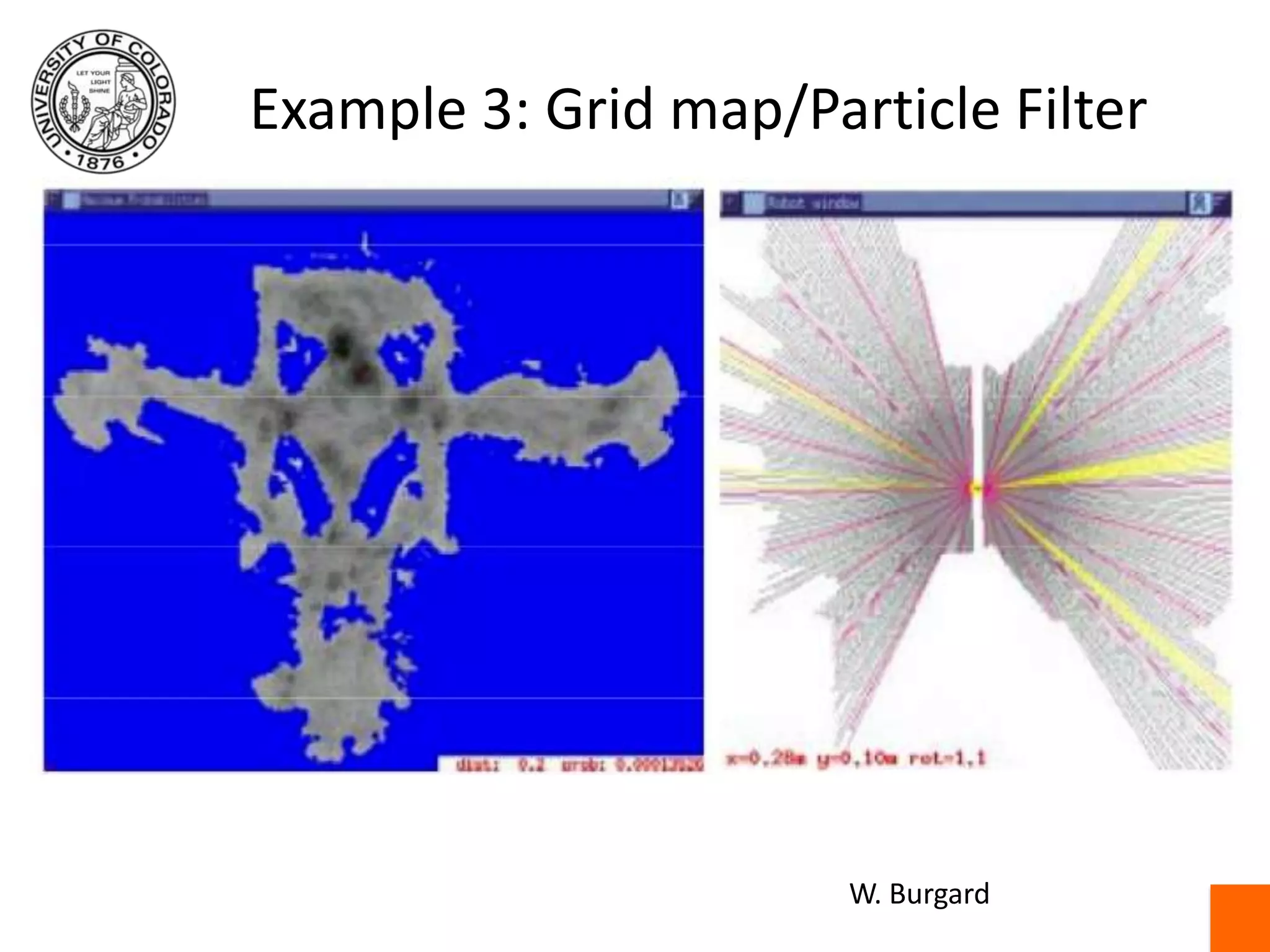
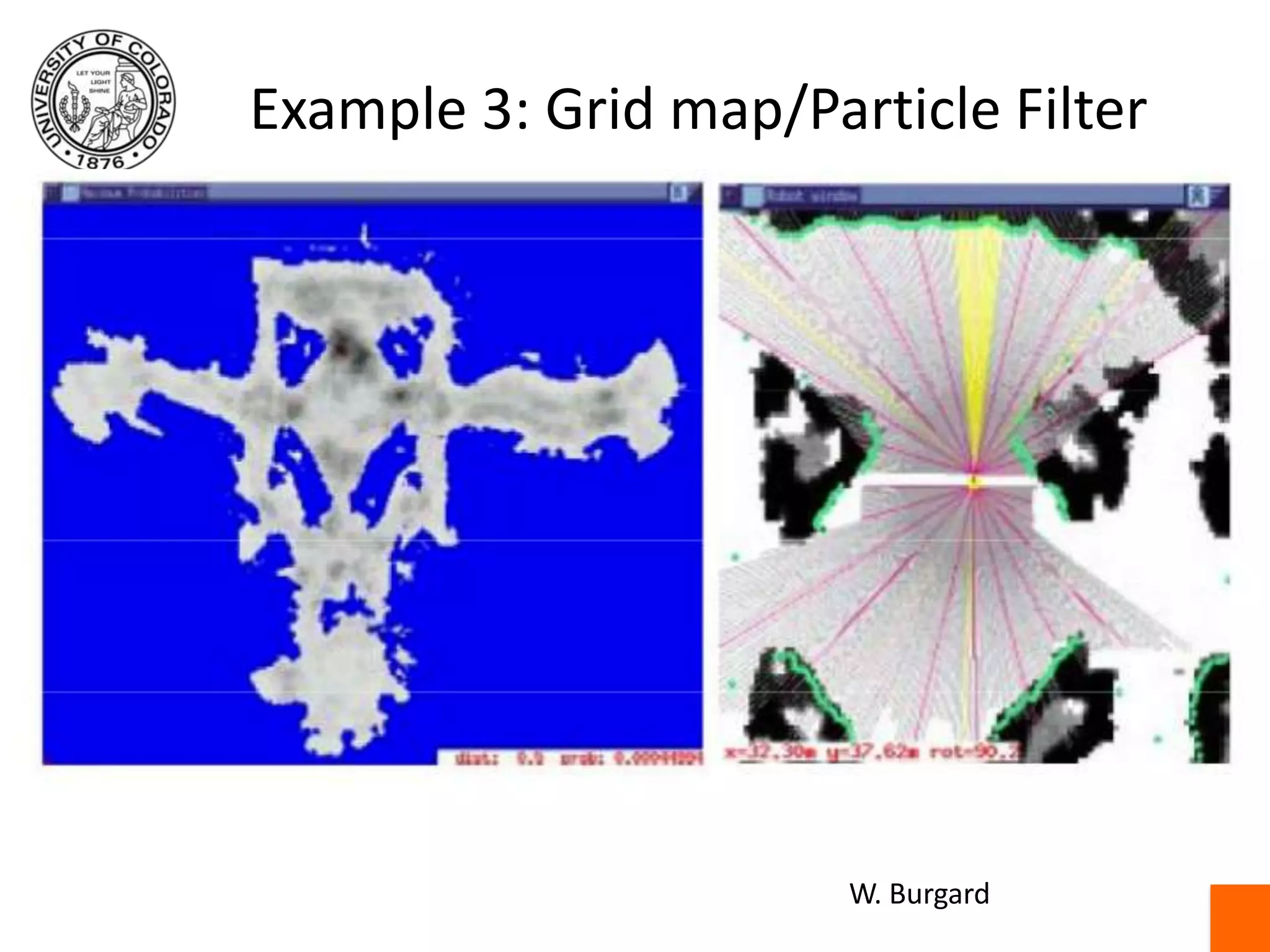
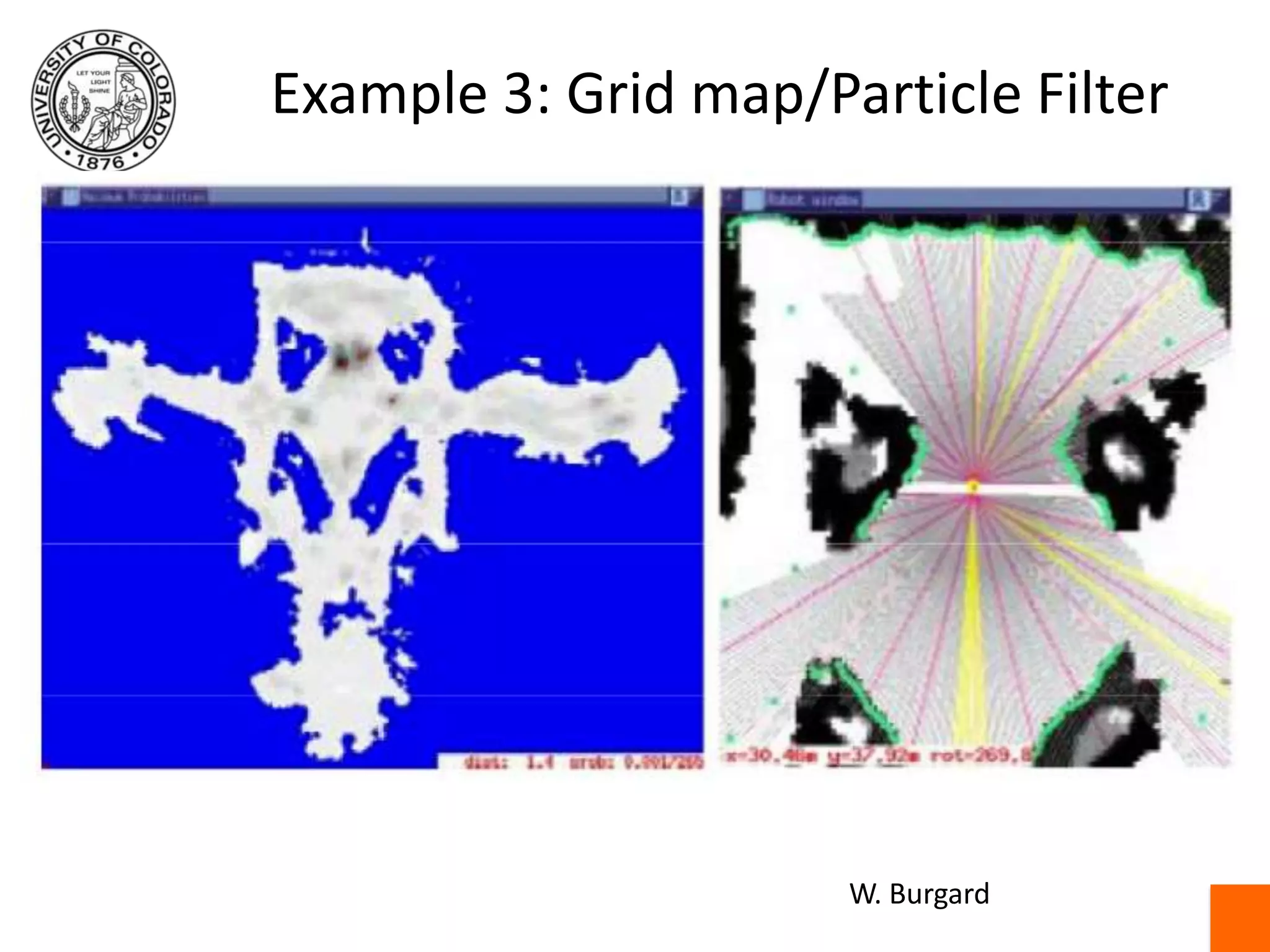
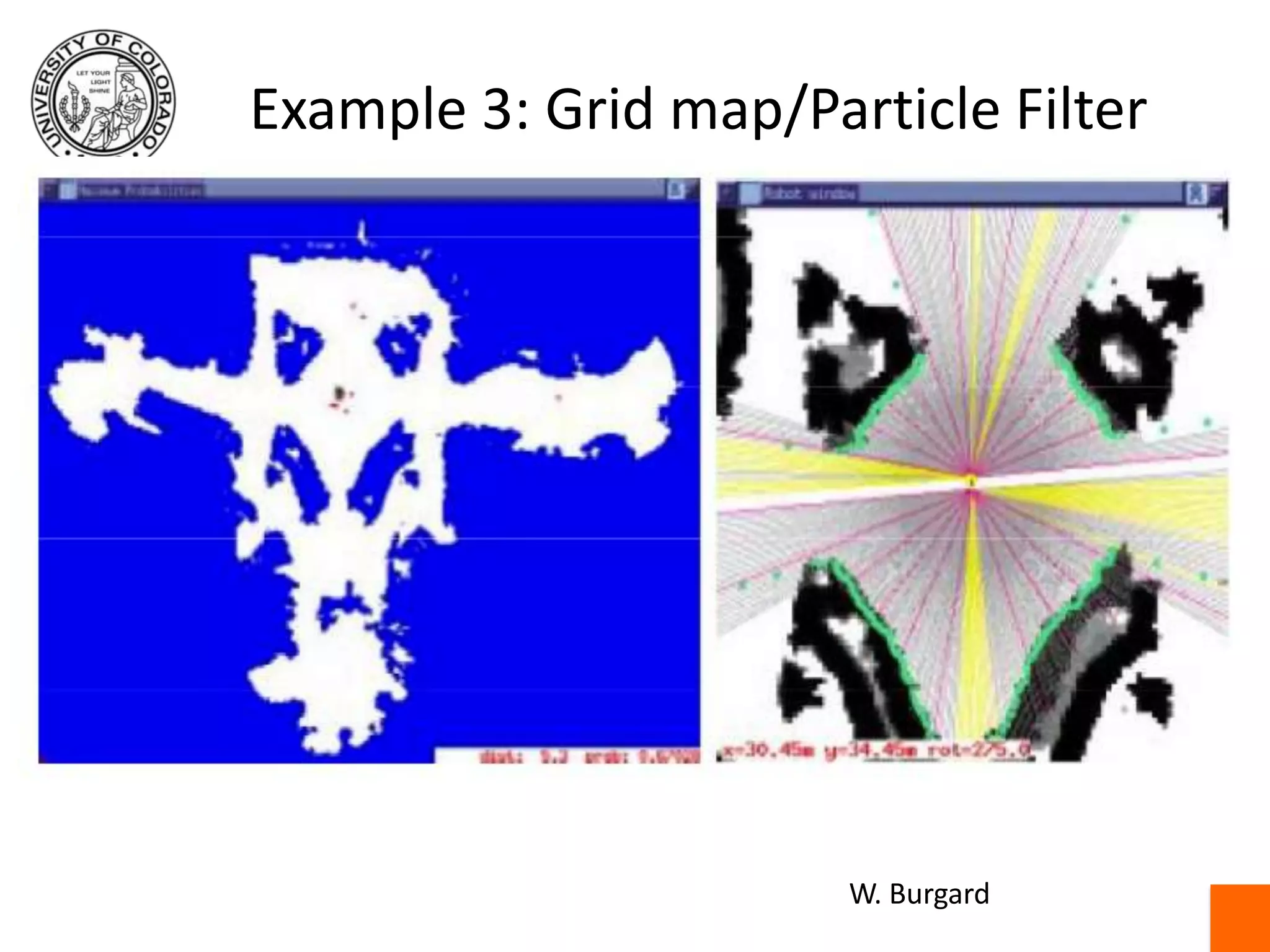
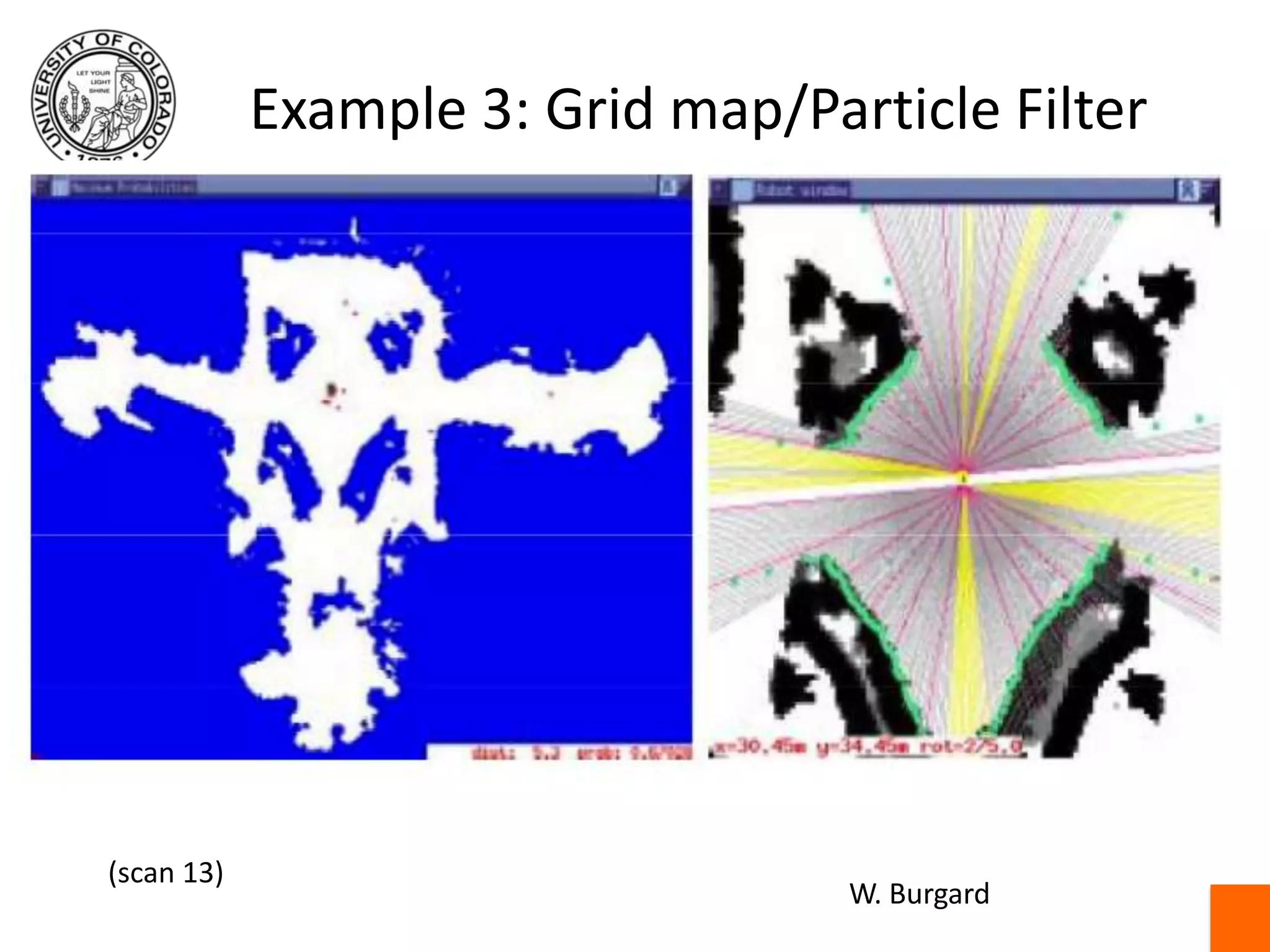
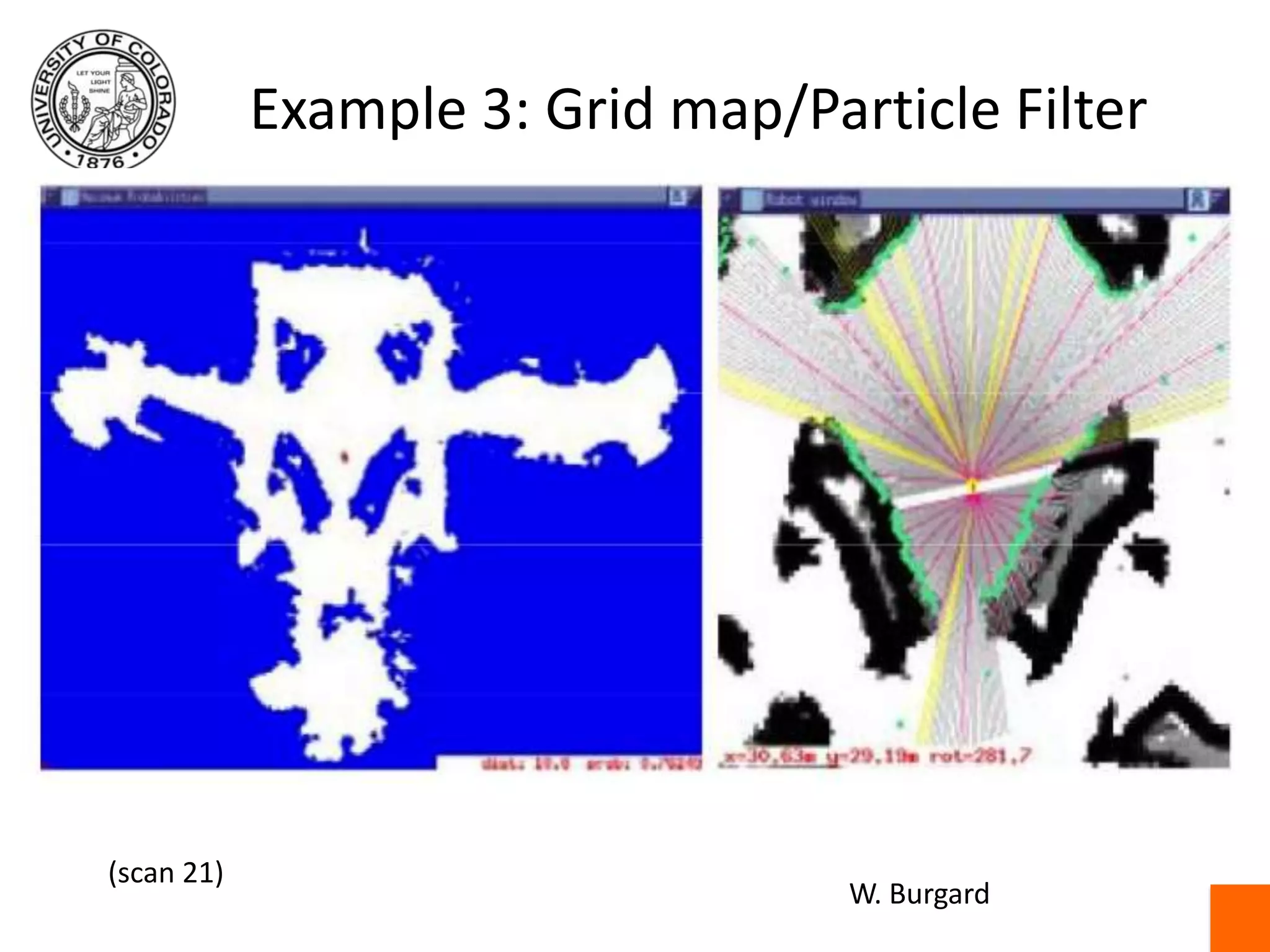
This document discusses algorithms for localization and mapping in robotics, including Dijkstra's algorithm, A* search, odometry, GPS, landmarks, and gyroscopes. It introduces probabilistic localization using Markov localization on discrete state spaces like grids or topological maps. Bayes' rule is used to update the probability of a robot's location based on sensor readings and motion. Particle filters are presented as a way to reduce complexity by random sampling rather than maintaining a full probability distribution over all locations. Examples show mapping and localization in a grid world using a particle filter approach. The homework assignment is to read about Markov localization and particle filters, and next week will include design reviews from student groups.