


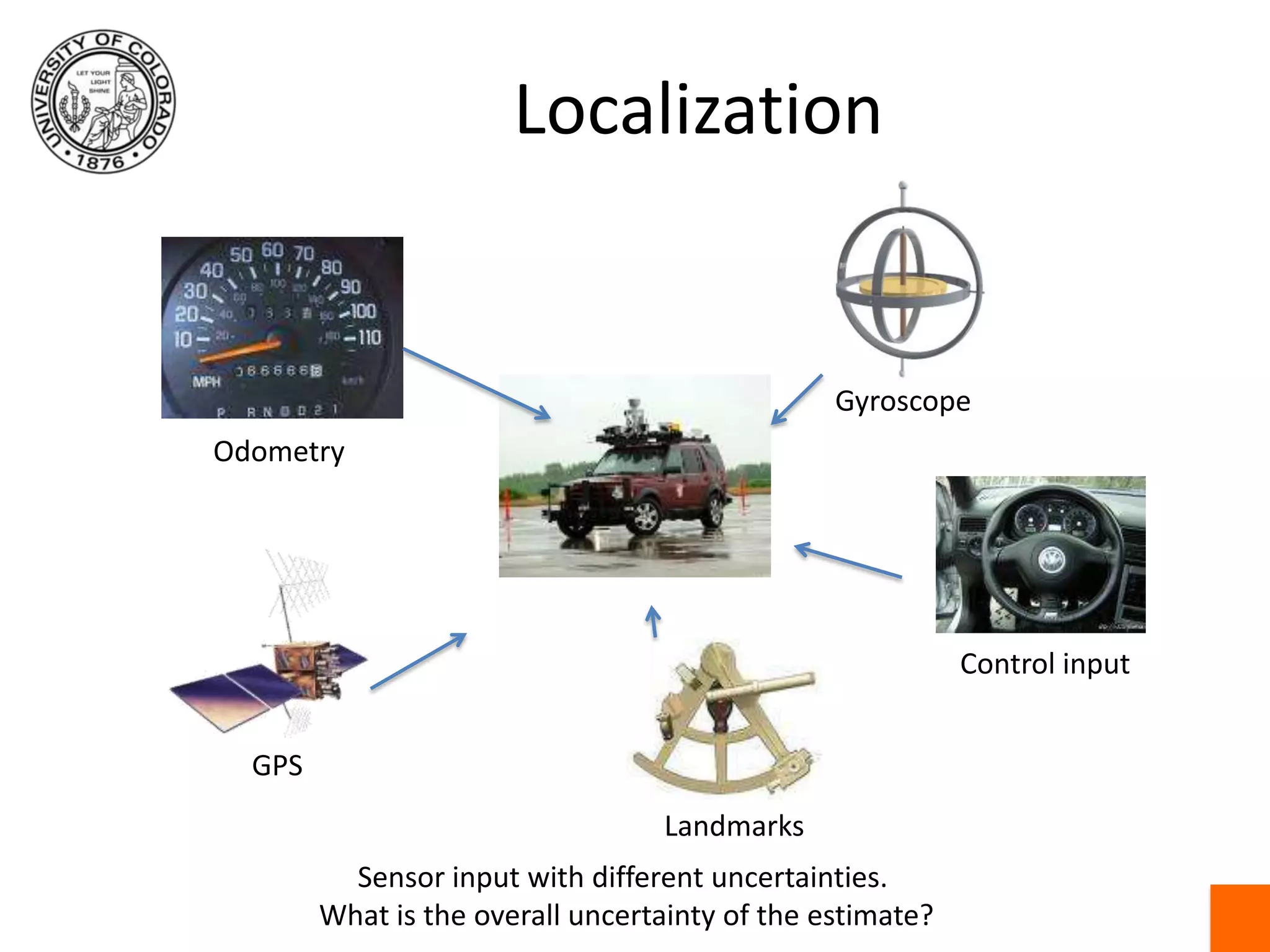
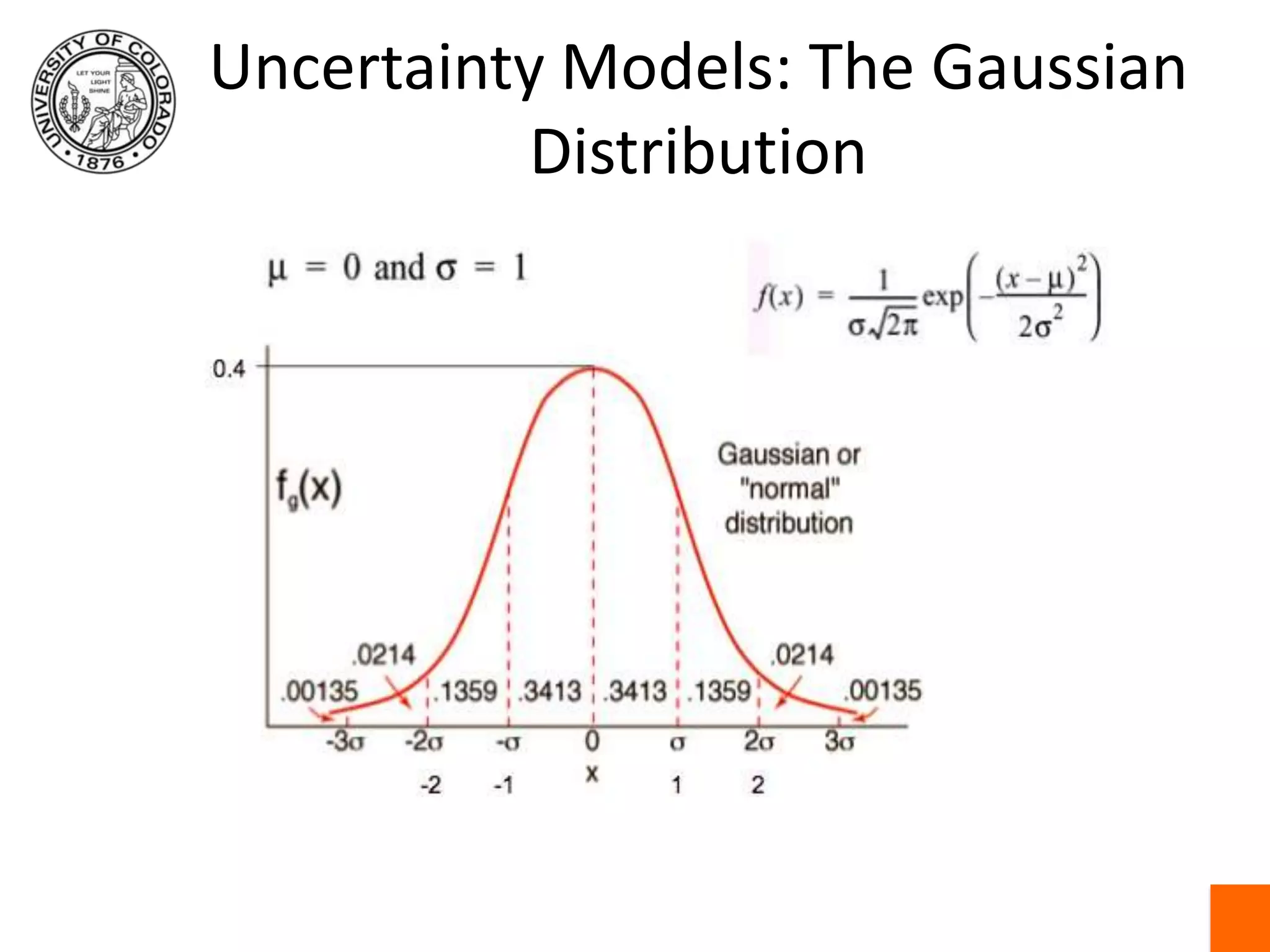
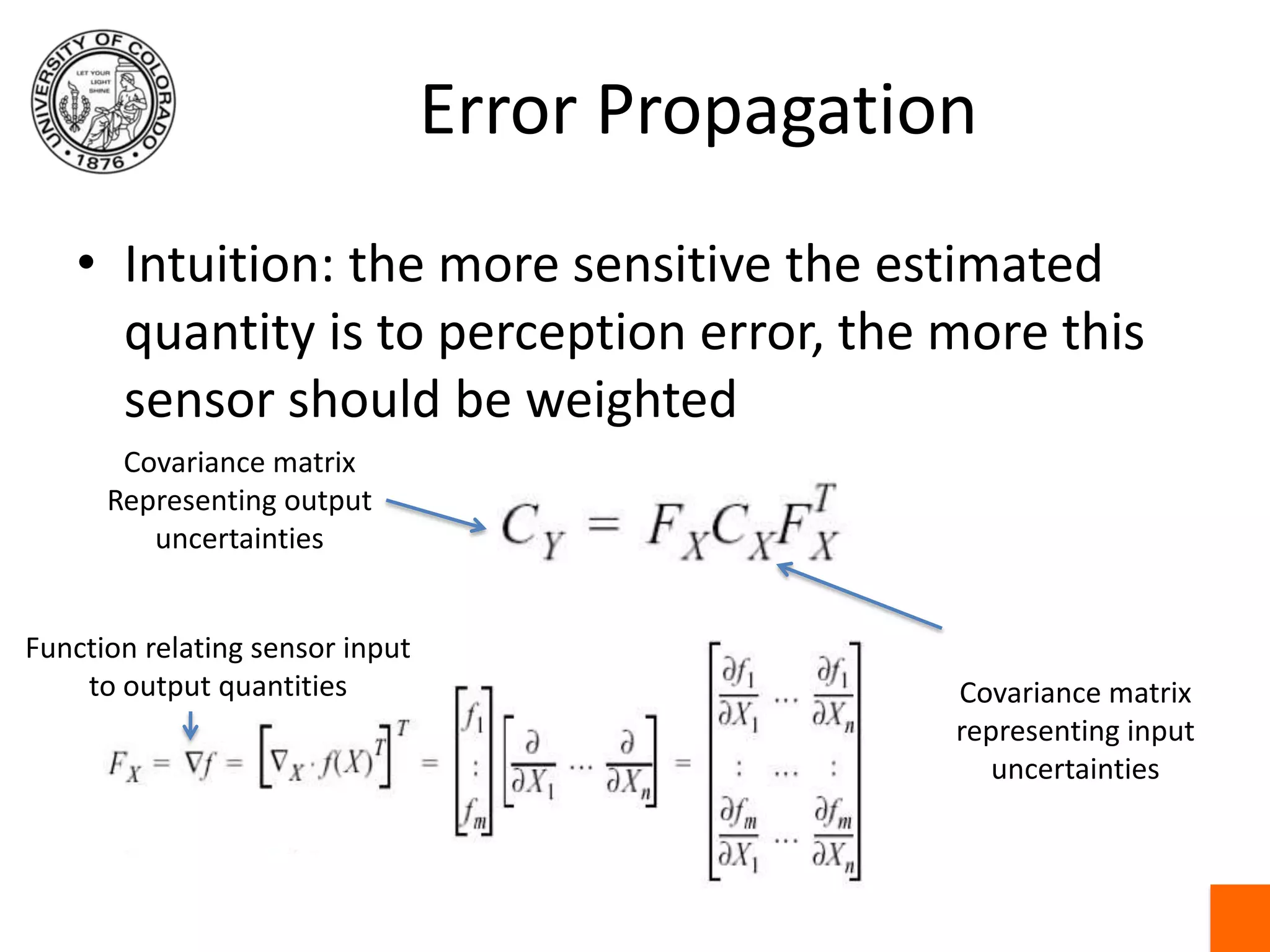
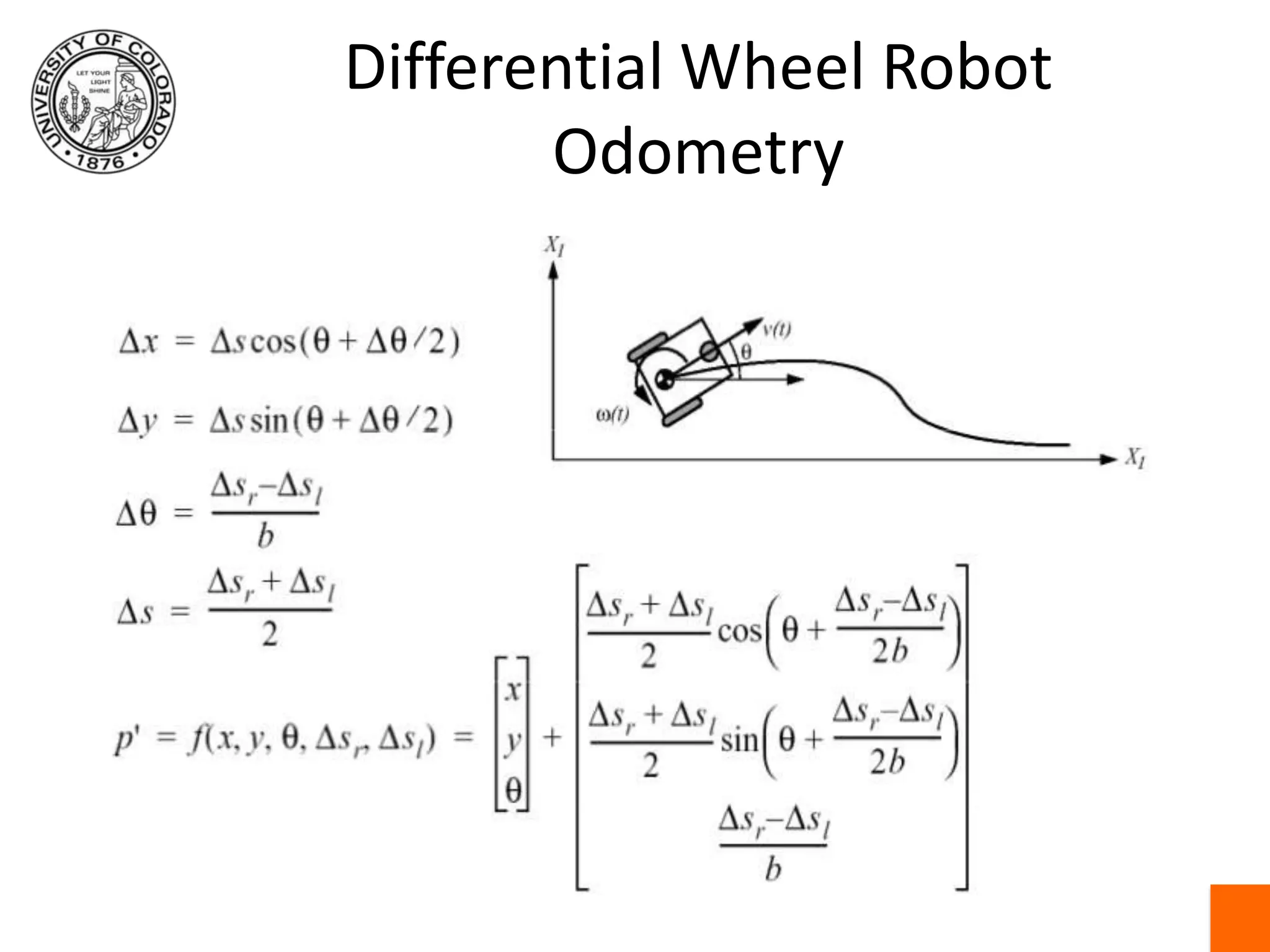
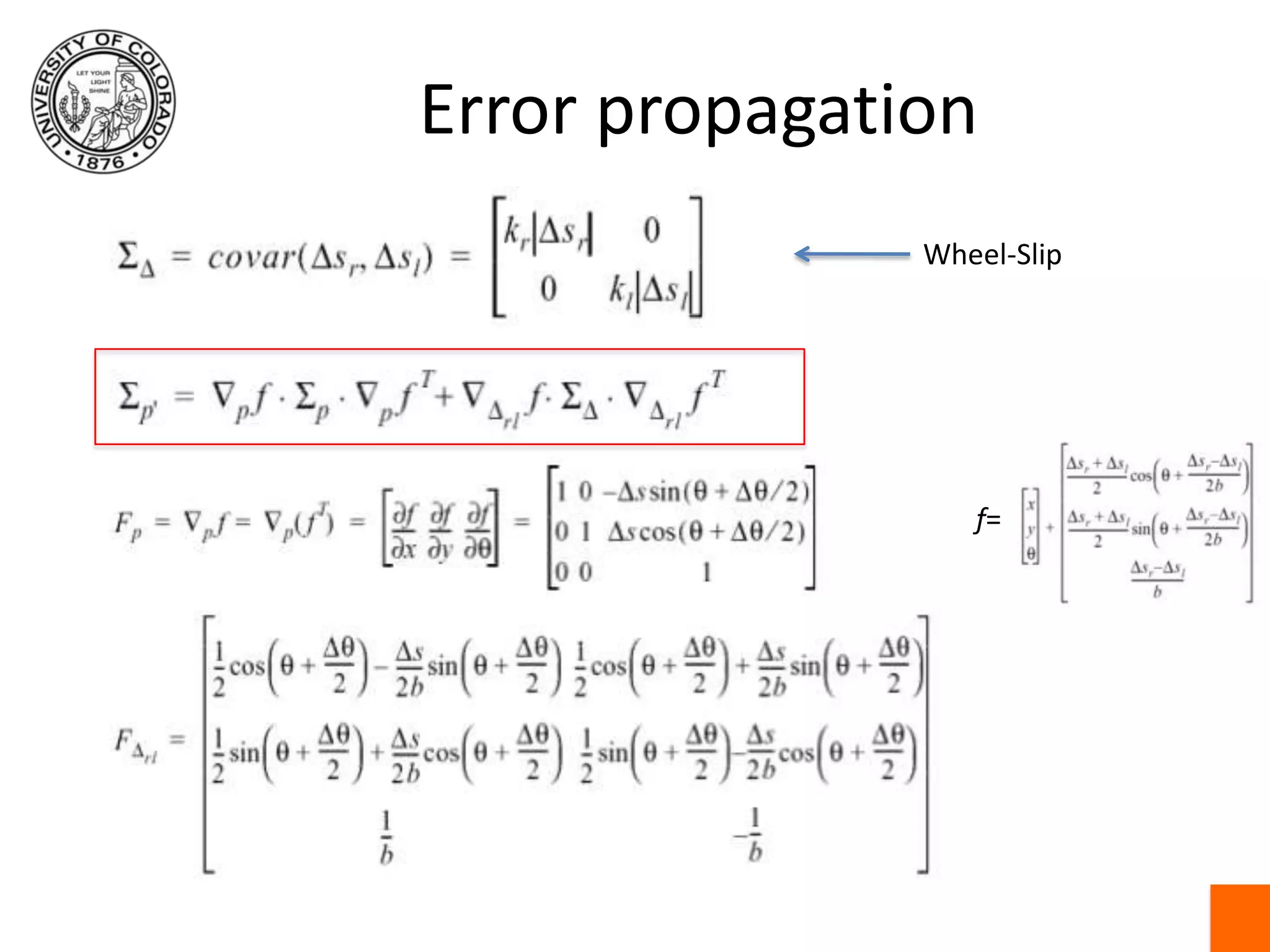
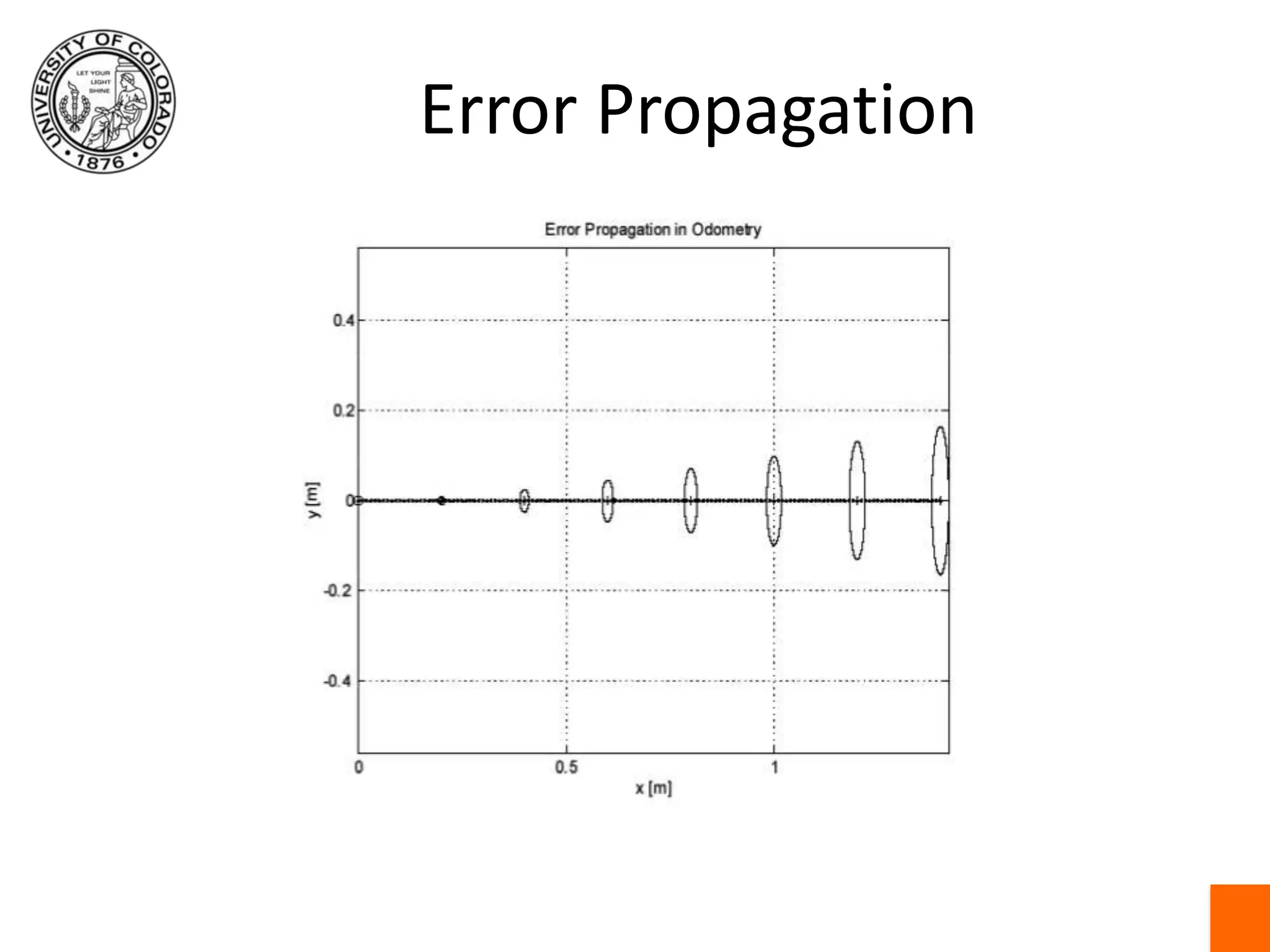
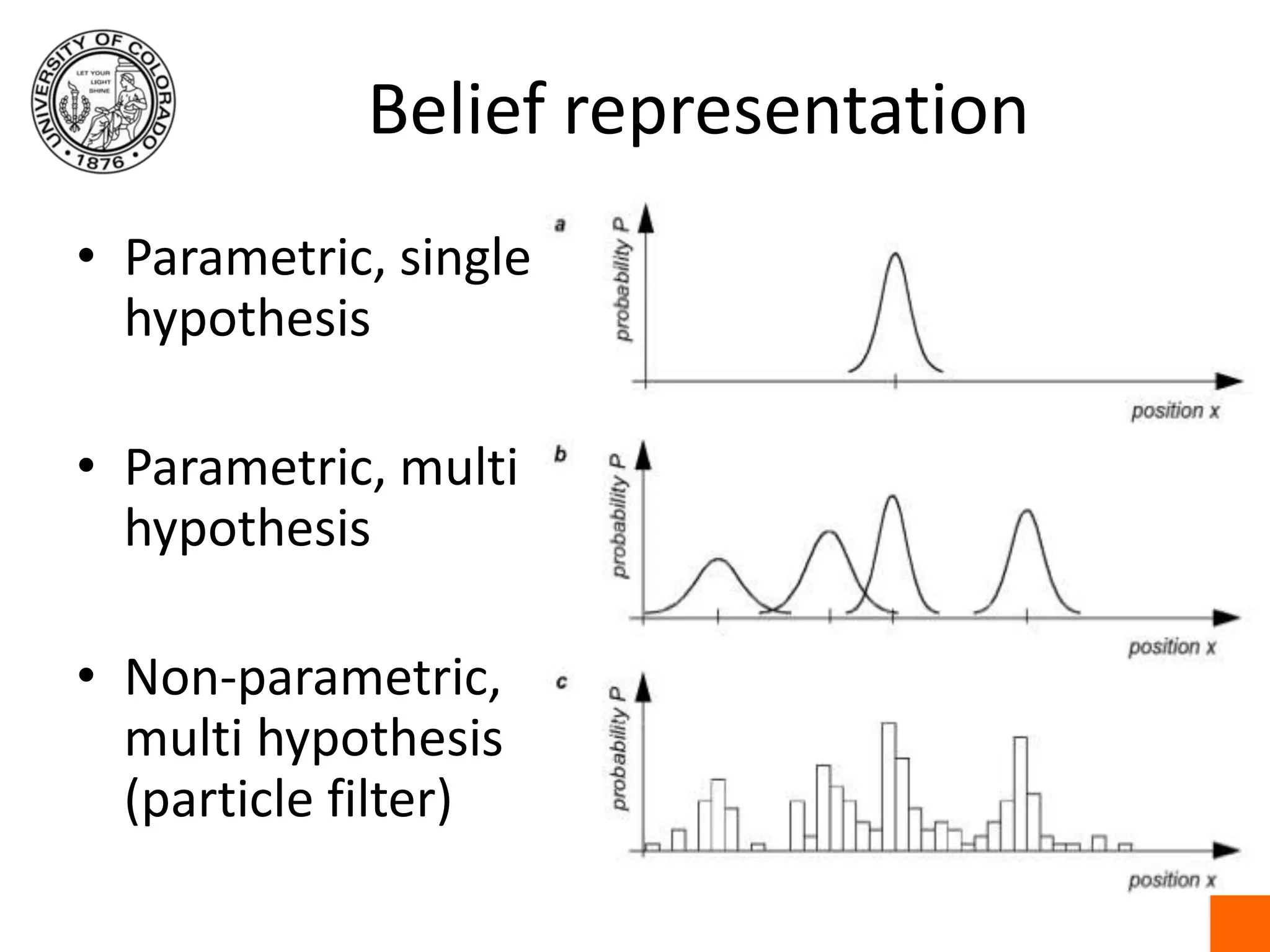

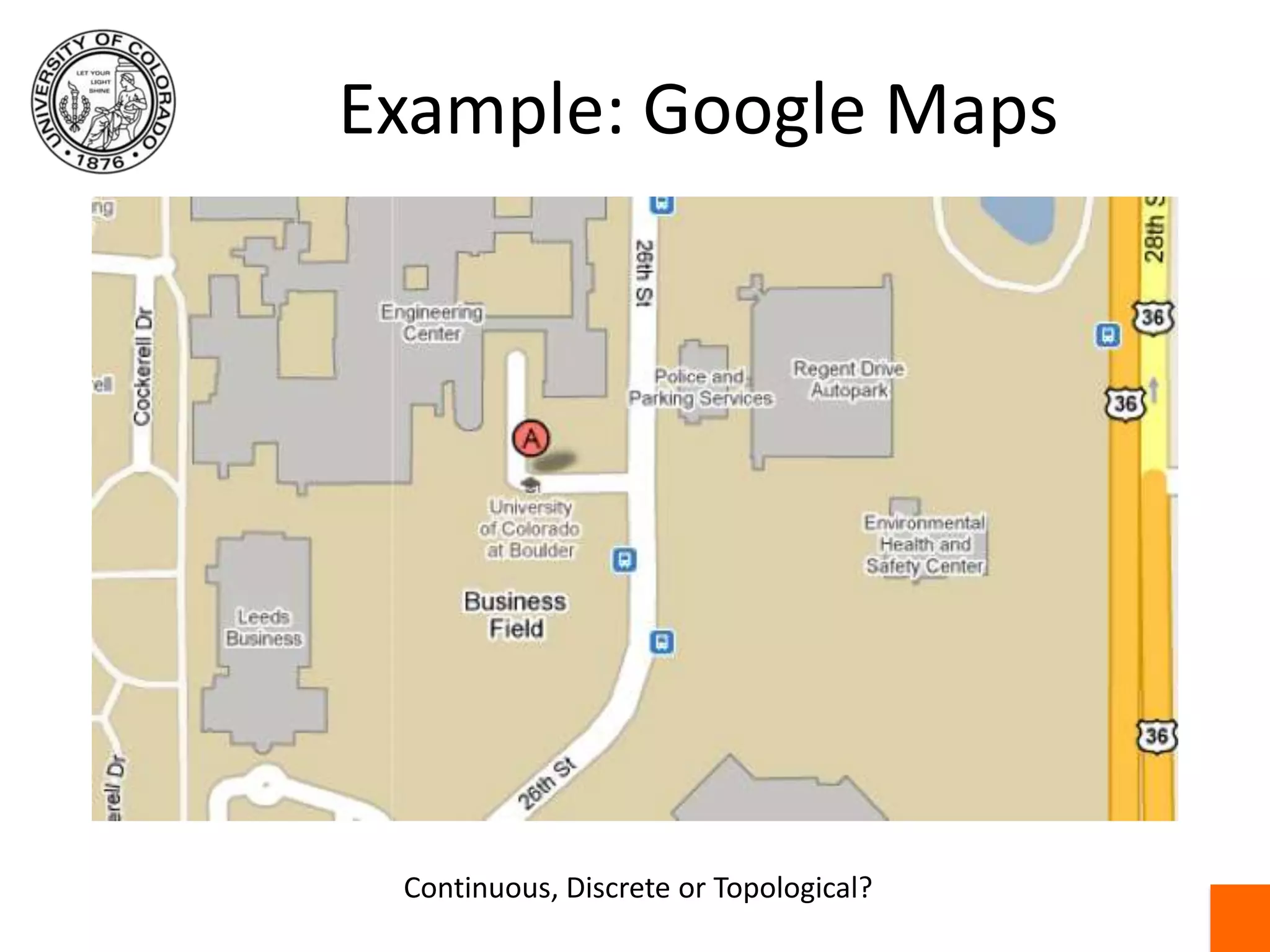
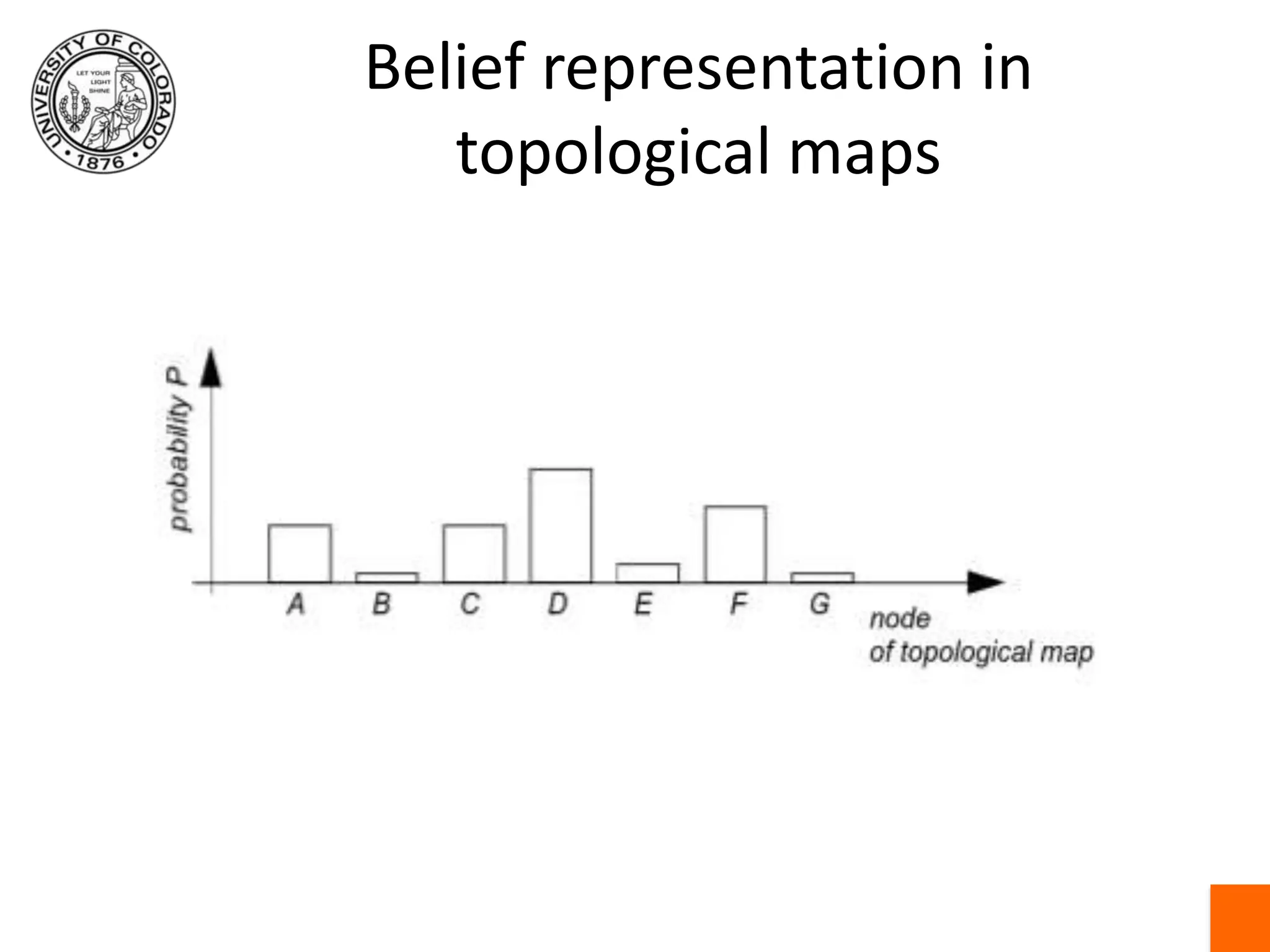
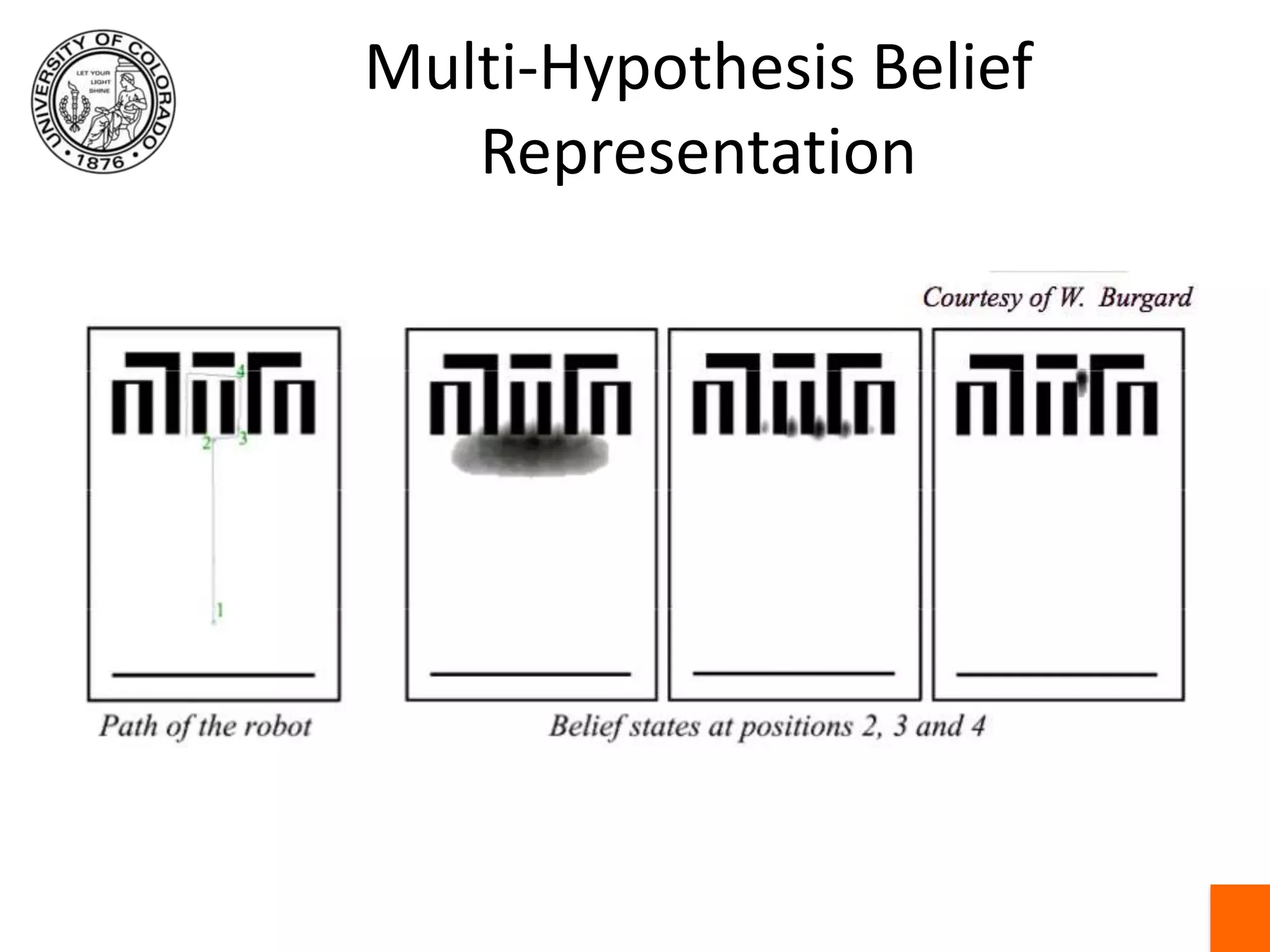
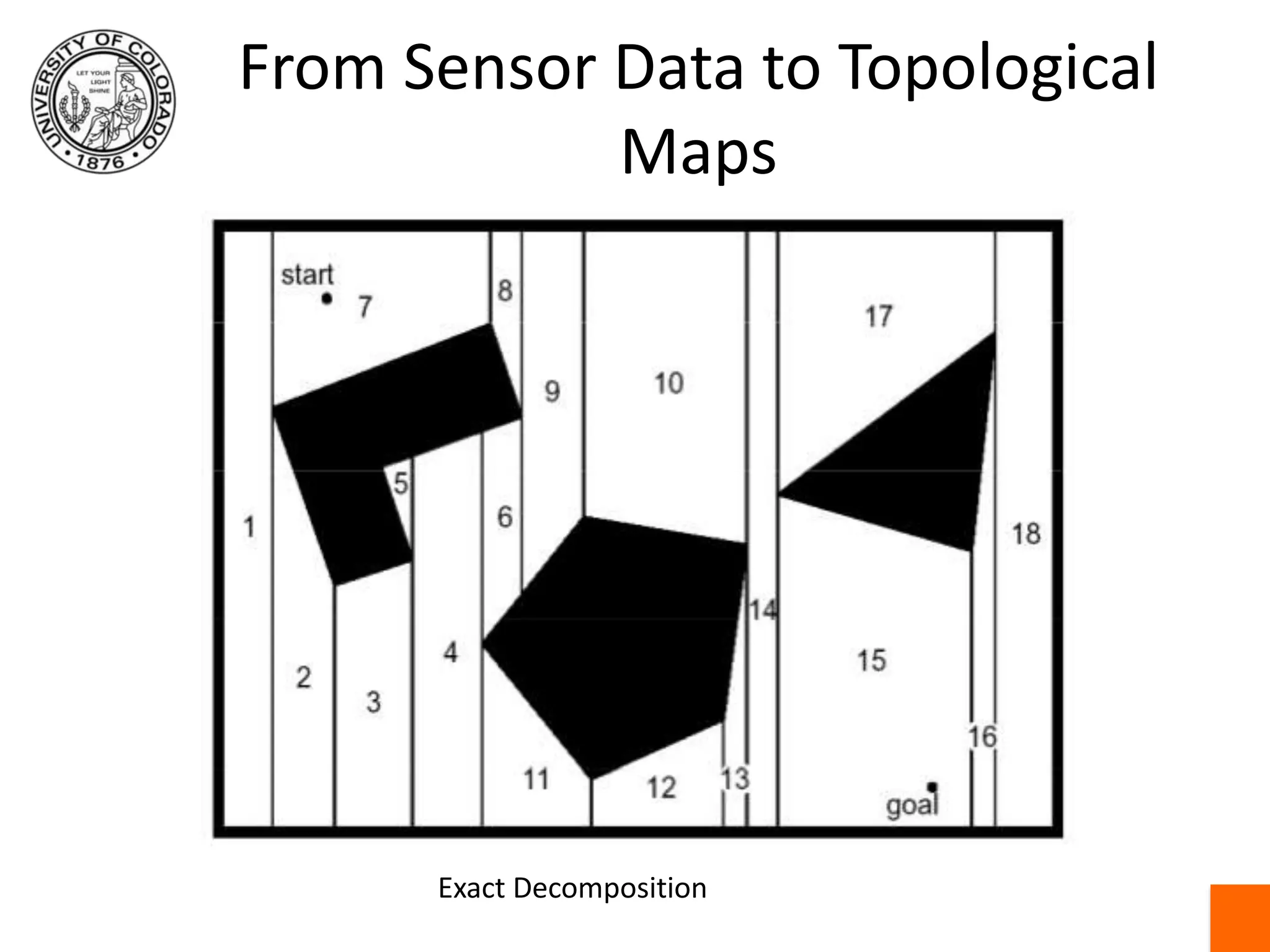
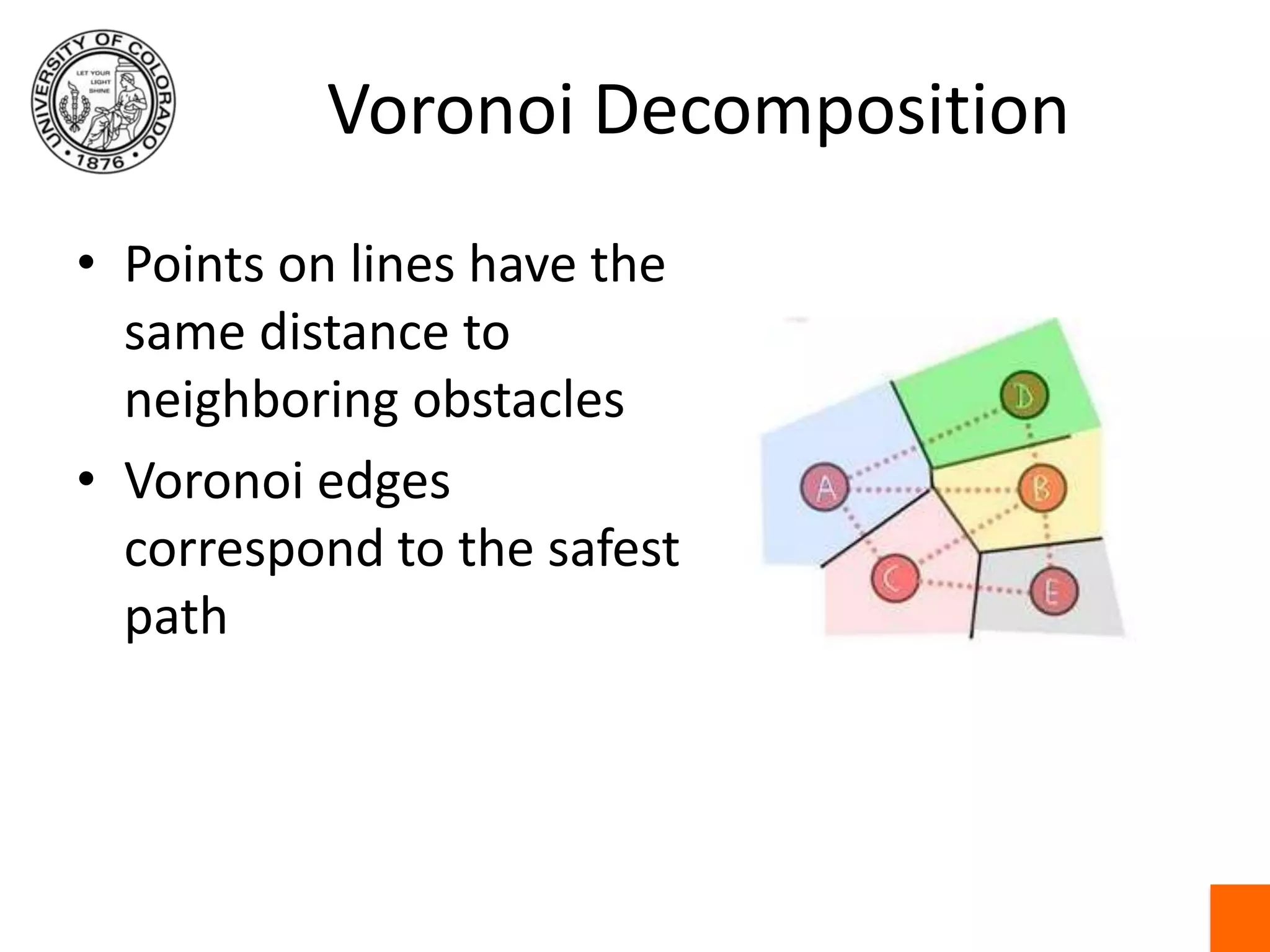
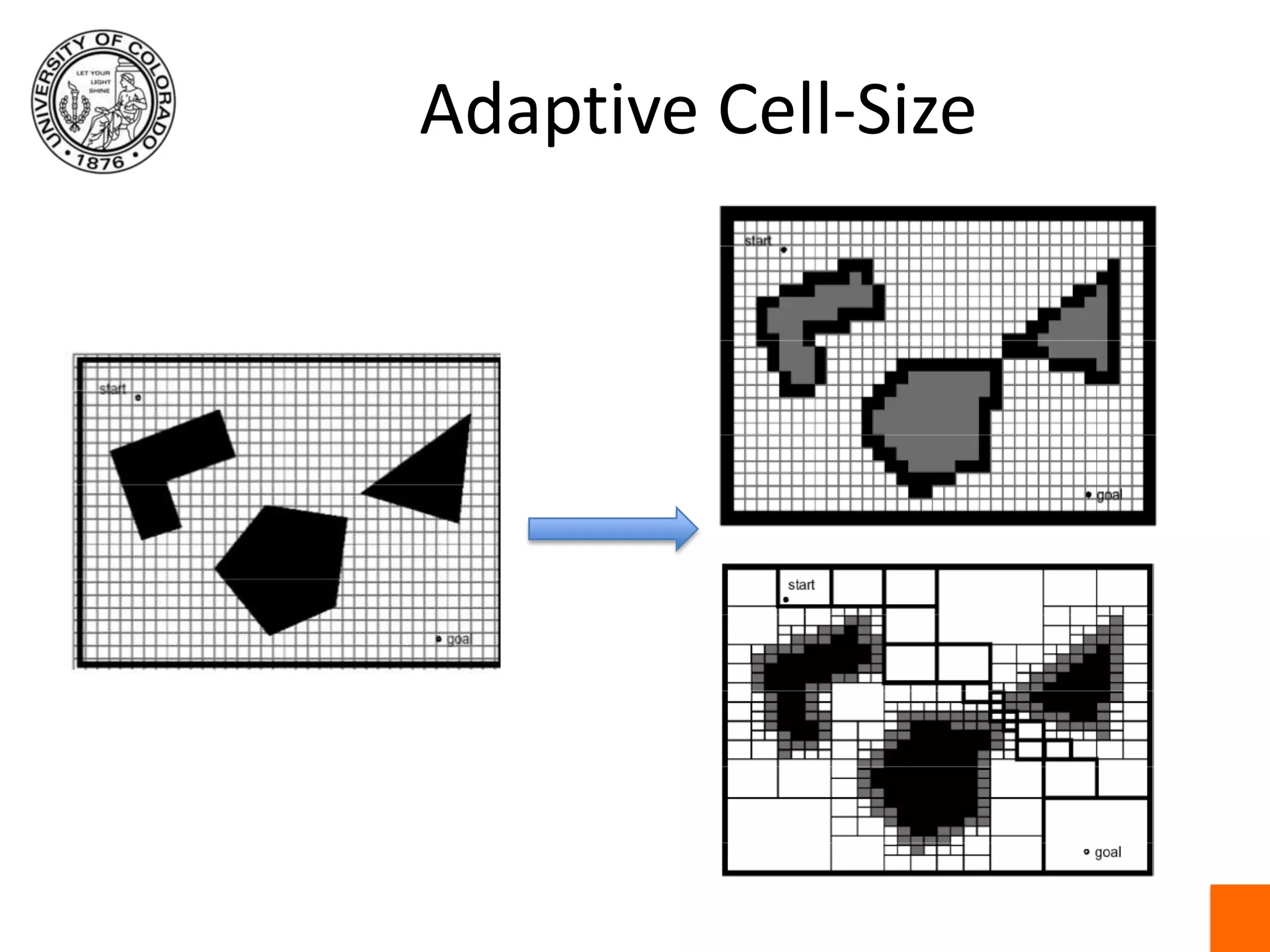

This document discusses localization and mapping for robotics. It introduces topics like gyroscopes, odometry, GPS, and landmarks for localization. It discusses uncertainty models using Gaussian distributions and error propagation. Methods for belief representation are presented, including parametric single/multi hypothesis and non-parametric particle filters. Environment representations like continuous, discrete, and topological maps are described. The document provides an example of Google Maps and discusses belief representation in topological maps. It also covers multi-hypothesis belief representation, sensor data to topological maps using exact and Voronoi decompositions, and adaptive cell-size. The document assigns homework on navigation algorithms and reactive vs. deliberative planning.