Downloaded 43 times
![Properties • Properties o global variables with selectively limited visibility (read or read/write) o categorized into a hierarchical, tree-like structure o includes a root node, sub nodes, and end-nodes o referenced relative to the current node, or to the root node o refer to specific parameters in program code o can be assigned from • command line • specification/configuration files • scripts • Example: o fcs/left-brake-cmd-norm and ap/altitude_setpoint • Standard properties of acceleration, altitude, fcs, position, propulsion, and velocities can be seen in [1]. 11](https://image.slidesharecdn.com/xmlintroductionandusesofxmlinjsbsim-160804100339/75/XML-introduction-and-Uses-of-XML-in-JSBSim-11-2048.jpg)
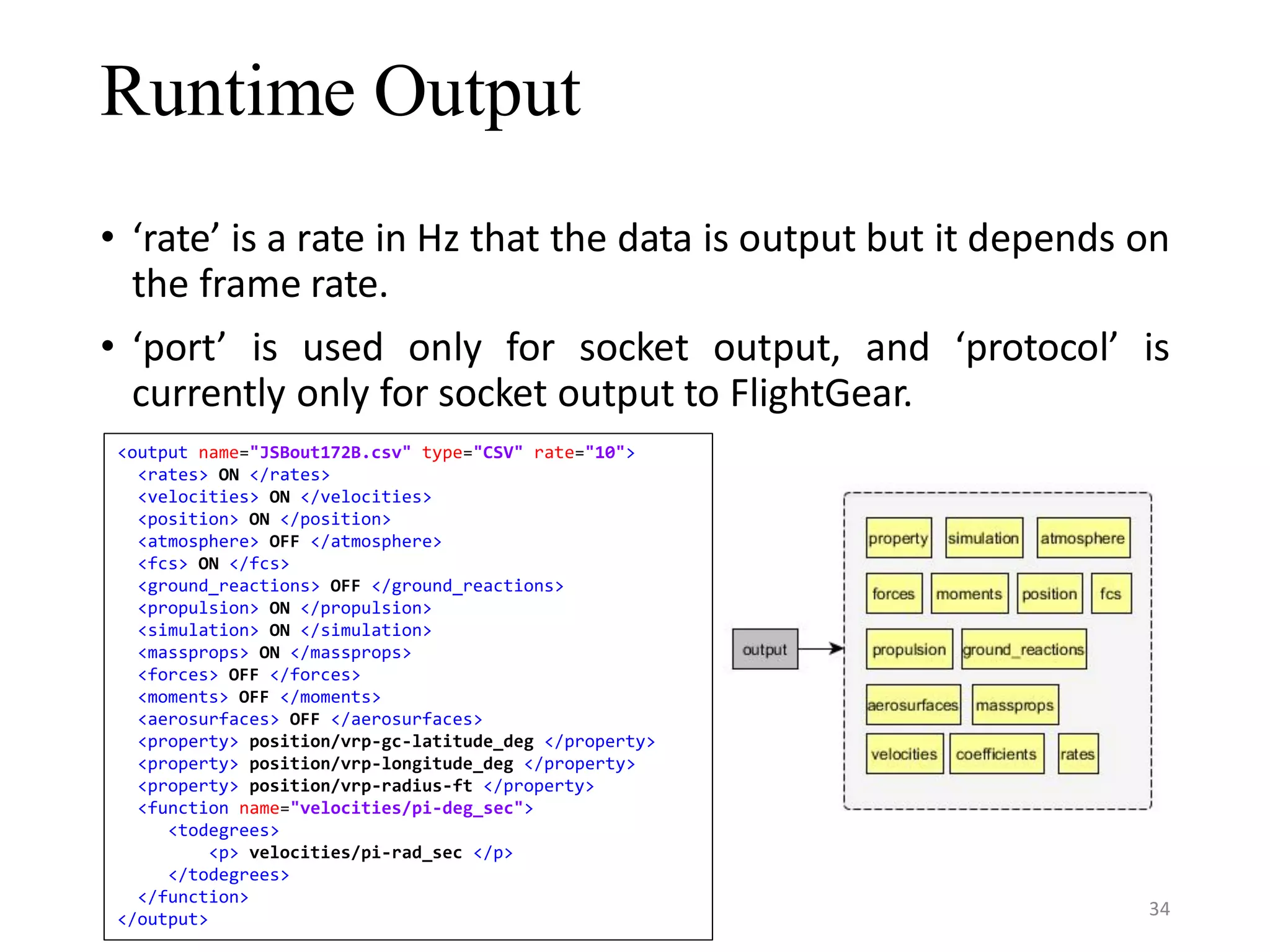
![Runtime Output • Can output data in many ways by particularly specifying in the ‘type’ attribute: o CSV comma separated data o SOCKET sends data to another machine via a socket o FLIGHTGEAR creates a socket for sending binary data packets to an external instance of FlightGear for visuals o TABULAR columnar data, tab-delimited. o NONE specifies to do nothing. • name : IP address, file name, others <output name=”name” type=”type” [port=”int” protocol=”UDP|TCP”] rate=”number”> [<group> OFF|ON </group>] [<property> name </property>] </output> 33](https://image.slidesharecdn.com/xmlintroductionandusesofxmlinjsbsim-160804100339/75/XML-introduction-and-Uses-of-XML-in-JSBSim-33-2048.jpg)
![Calling Script from JSBSim • The program interface to JSBSim for scripting can be minimized into: • Entire program source code can be seen in [9] FDMExec = new JSBSim::FGFDMExec(); .... result = FDMExec->LoadScript(ScriptName, override_sim_rate_value, ResetName); .... result = FDMExec->Run(); .... 48](https://image.slidesharecdn.com/xmlintroductionandusesofxmlinjsbsim-160804100339/75/XML-introduction-and-Uses-of-XML-in-JSBSim-48-2048.jpg)
![System: Filter Component • The filter element can model several types of filters. The Tustin substitution is used to take filter definitions from Laplace space to the time domain. <typename name=”name”> <input> property </input> <c1> number|property </c1> [<c2> number|property </c2>] [<c3> number|property </c3>] [<c4> number|property </c4>] [<c5> number|property </c5>] [<c6> number|property </c6>] [<clipto> <min> number|property </min> <max> number|property </max> </clipto>] [<output> property </output>] </typename> <lag_filter name=”filter1”> <input> fcs/pitch-cmd </input> <c1> 600 </c1> </lag_filter> 49](https://image.slidesharecdn.com/xmlintroductionandusesofxmlinjsbsim-160804100339/75/XML-introduction-and-Uses-of-XML-in-JSBSim-49-2048.jpg)
![System: switch • The switch element models a switch – either an on/off or multi-choice rotary switch. <switch name=”name”> <default value=”{property|number}”/> <test logic=”{AND|OR}” value=”{property|number}”> {property} {conditional} {property|number} … [<test logic=”{AND|OR}” value=”{property|number}”> {property} {conditional} {property|number} … </test>] </test> … [<clipto> <min> number|property </min> <max> number|property </max> </clipto>] [<output> property </output>] </switch> <switch name=”fcs/roll_ap_autoswitch”> <default value=”0.0”/> <test value=”fcs/roll-ap-error-summer”> ap/attitude_hold == 1 </test> </switch> 50](https://image.slidesharecdn.com/xmlintroductionandusesofxmlinjsbsim-160804100339/75/XML-introduction-and-Uses-of-XML-in-JSBSim-50-2048.jpg)
![System: summer • It sums two or more inputs. A bias can also be added in using bias keyword. • There can be only one bias statement per component. <summer name=”name”> <input> [-]property </input> … <bias> number </bias> [<clipto> <min> number|property </min> <max> number|property </max> </clipto>] [<output> property </output>] </summer> <summer name=”fcs/pid_sum”> <input> velocities/p-rad_sec </input> <input> -fcs/roll-ap-wing-leveler </input> <input> fcs/roll-ap-error-integrator </input> [<clipto> <min> -1.0 </min> <max> 1.0 </max> </clipto>] </summer> 51](https://image.slidesharecdn.com/xmlintroductionandusesofxmlinjsbsim-160804100339/75/XML-introduction-and-Uses-of-XML-in-JSBSim-51-2048.jpg)
![System: deadband • This is a component that allows for some play in a control path, in the form of a dead zone, or deadband. • The width value is the total deadband region within which an input will produce no output. • For example, assume that the width value is 2. Then, if the input is between -1 and +1, the output will be zero. <deadband name="fcs/windup_trigger"> <input> [-]property </input> <width> number </width> [<clipto> <min> {[-]property|value} </min> <max> {[-]property|value} </max> </clipto>] [<output> {property} </output>] </deadband> 53](https://image.slidesharecdn.com/xmlintroductionandusesofxmlinjsbsim-160804100339/75/XML-introduction-and-Uses-of-XML-in-JSBSim-53-2048.jpg)
![System: fcs_function • It allows a function to be created when no other component is suitable. • The function can include a nested series of products, sums, quotients, and so on. <fcs_function name="fcs/windup_trigger"> [<input> [-]property </input>] <function> … </function> [<clipto> <min> {[-]property|value} </min> <max> {[-]property|value} </max> </clipto>] [<output> {property} </output>] </fcs_function > <function name="aero/coefficient/CDo"> <description>Drag_at_zero_lift</description> <product> <property>aero/qbar-psf</property> <property>metrics/Sw-sqft</property> <table> <independentVar>velocities/mach</independentVar> <tableData> 0.0000 0.0220 0.2000 0.0200 0.6500 0.0220 0.9000 0.0240 0.9700 0.0500 </tableData> </table> </product> </function> 54](https://image.slidesharecdn.com/xmlintroductionandusesofxmlinjsbsim-160804100339/75/XML-introduction-and-Uses-of-XML-in-JSBSim-54-2048.jpg)
![System: actuator • The actuator can be modeled as a perfect actuator with the output directly to input. • It can be made more realistic by specifying the additional effects such as system lag, rate limiting, deadband, hysteresis, bias, and so on. <actuator name=”name”> <input> {[-]property} </input> <lag> number </lag> <rate_limit> number <rate_limit> <bias> number </bias> <deadband_width> number </deadband_width> <hysteresis_width> number </hysteresis_width> [<clipto> <min> {[-]property|value} </min> <max> {[-]property|value} </max> </clipto>] [<output> {property} </output>] </actuator> <actuator name=”fcs/gimbal_pitch_position”> <input> fcs/gimbal_pitch_command </input> <lag> 60 </lag> <rate_limit> 0.085 <rate_limit> <!-- 5 degrees/sec --> <bias> 0.002 </bias> <deadband_width> 0.002 </deadband_width> <hysteresis_width> 0.05 </hysteresis_width> <clipto> <!-- +/- 10 degrees --> <min> -0.17 </min> <max> 0.17 </max> </clipto> </actuator> 55](https://image.slidesharecdn.com/xmlintroductionandusesofxmlinjsbsim-160804100339/75/XML-introduction-and-Uses-of-XML-in-JSBSim-55-2048.jpg)

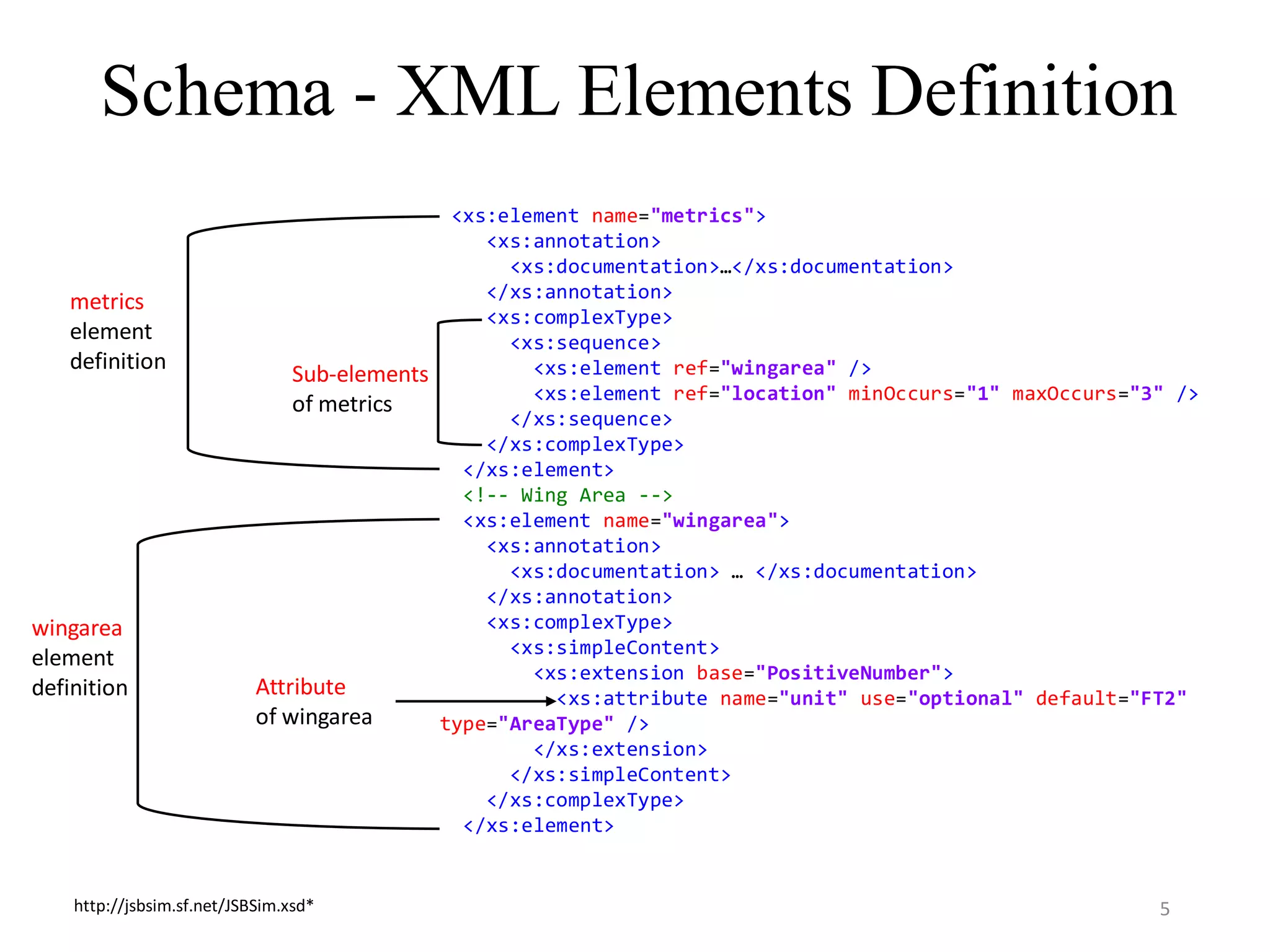
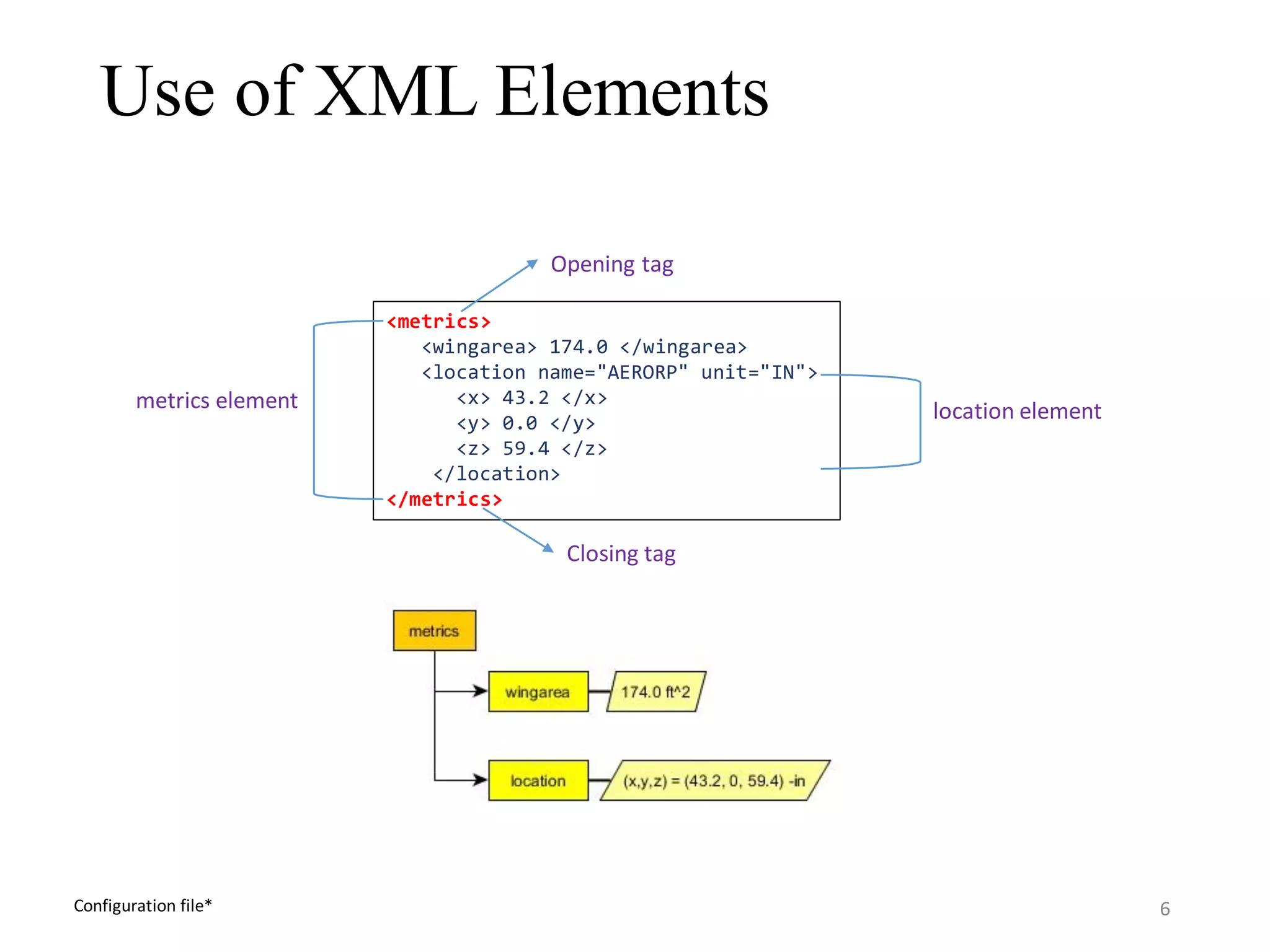
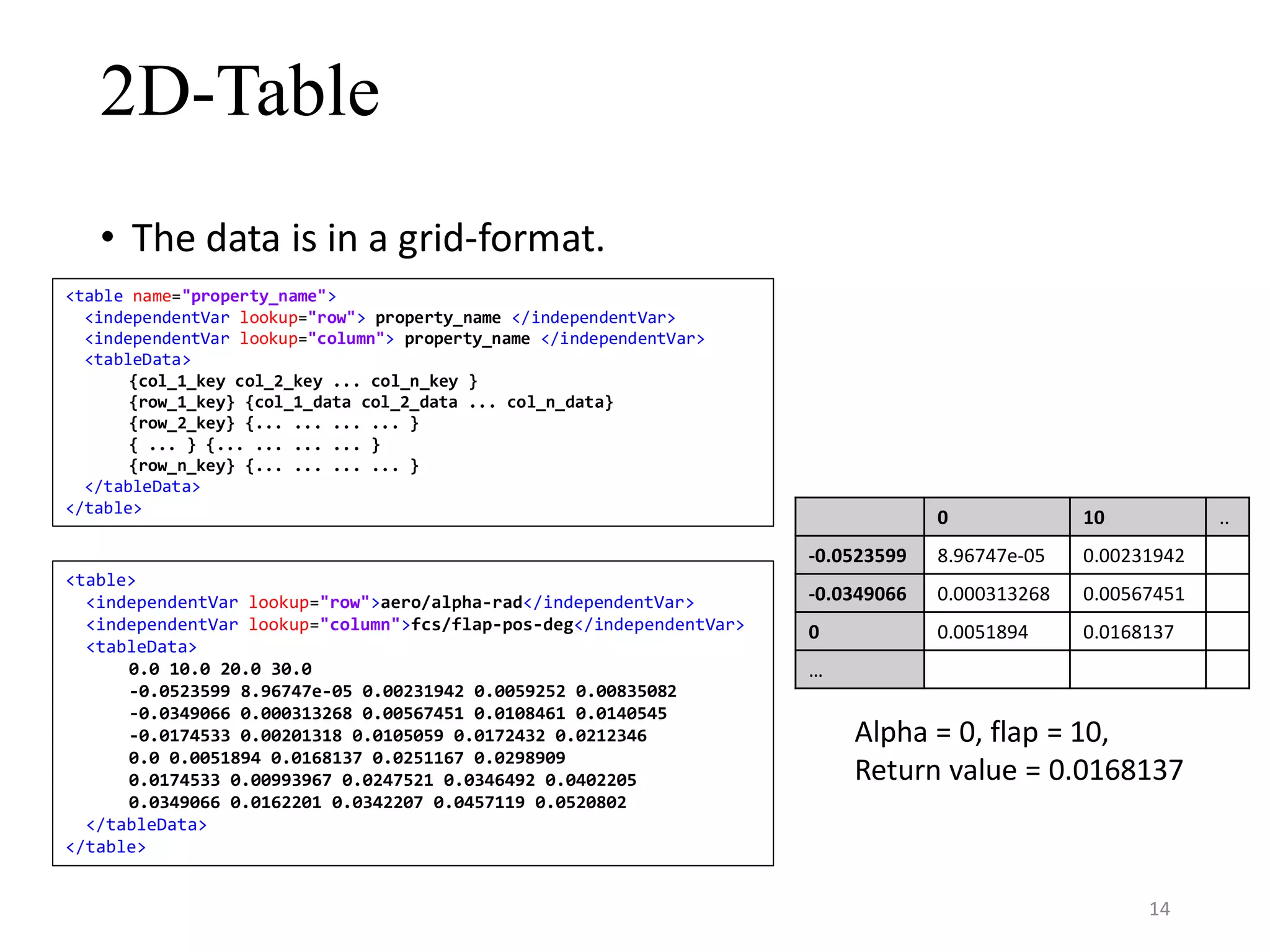
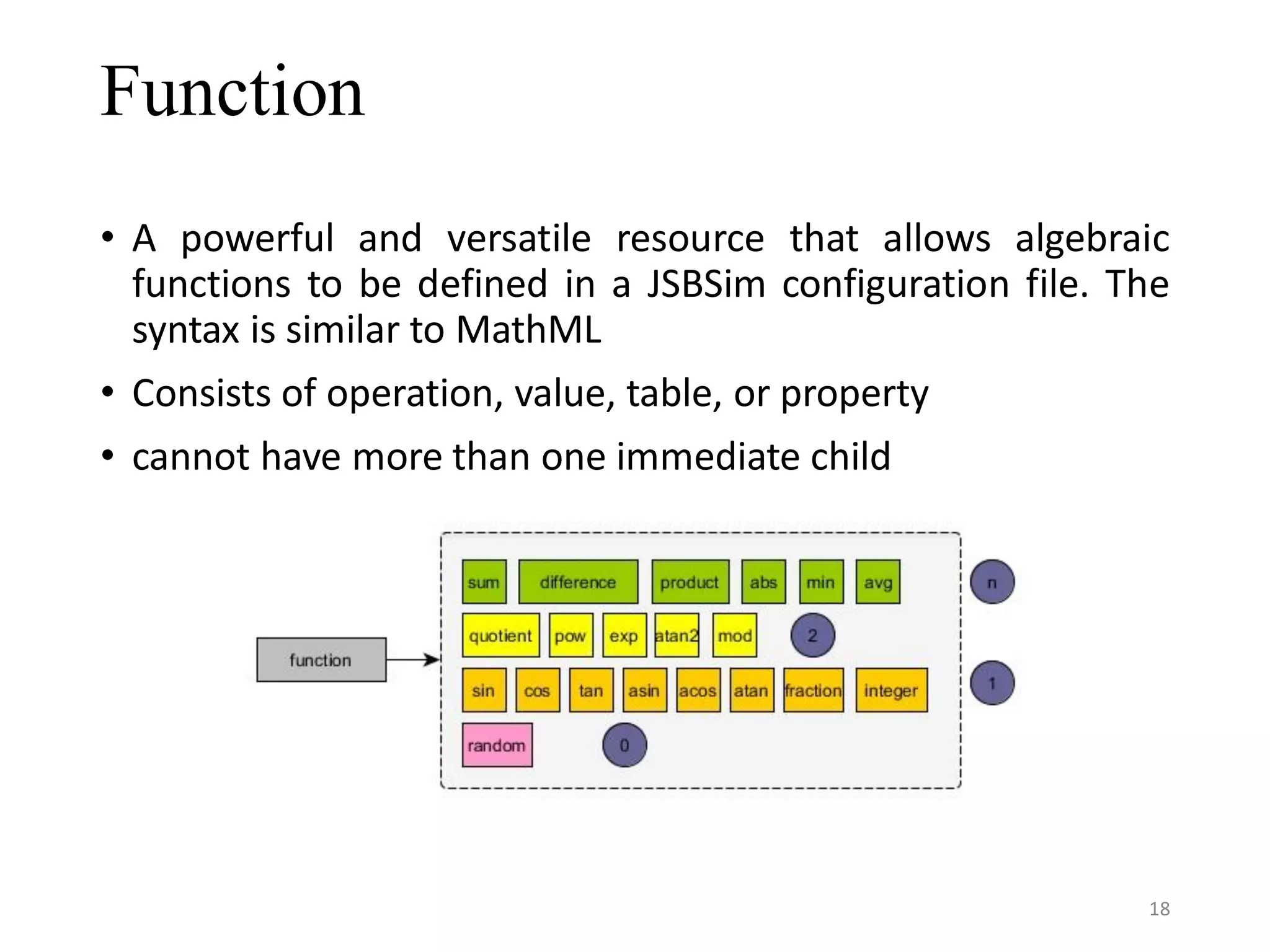
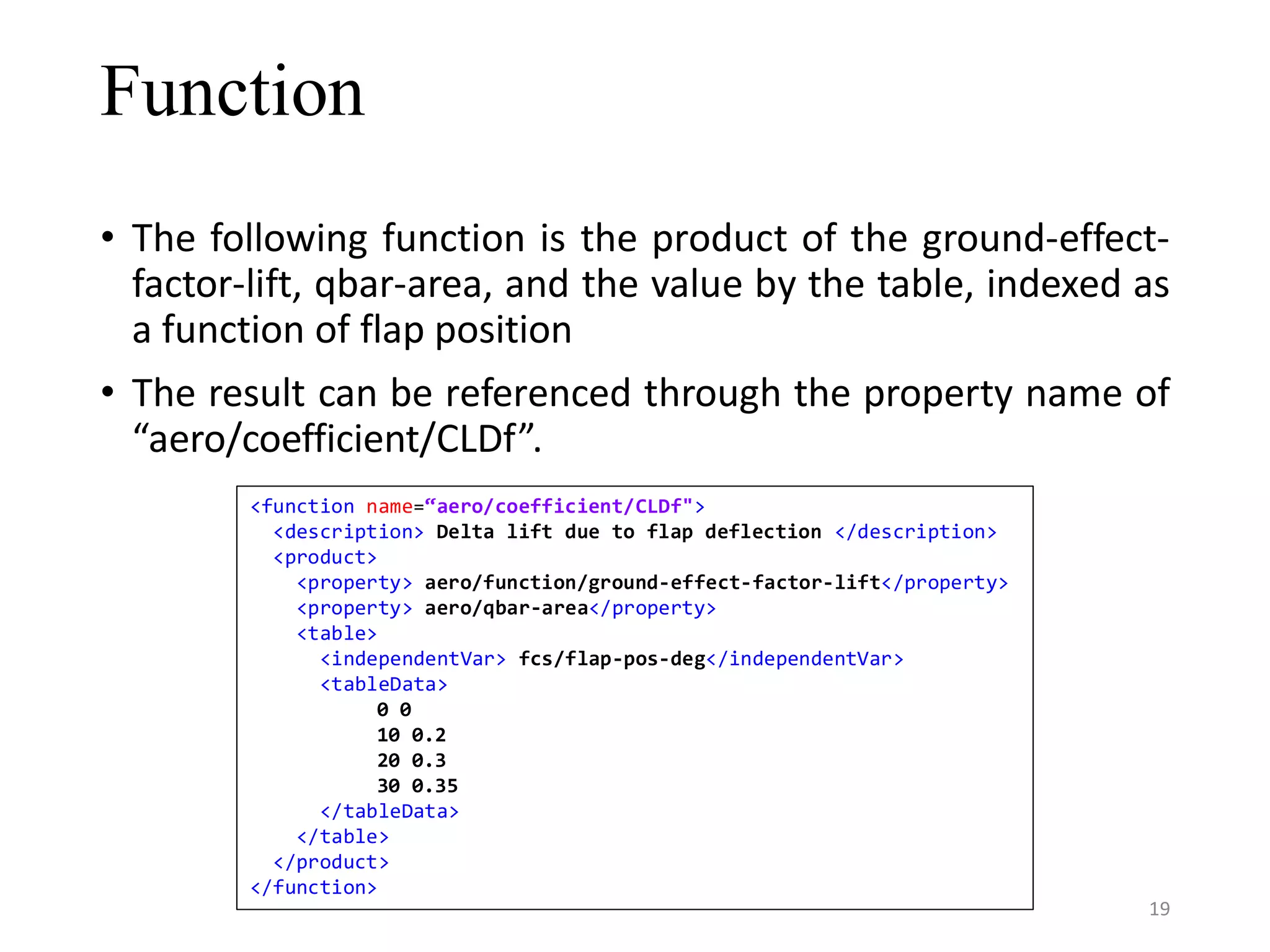
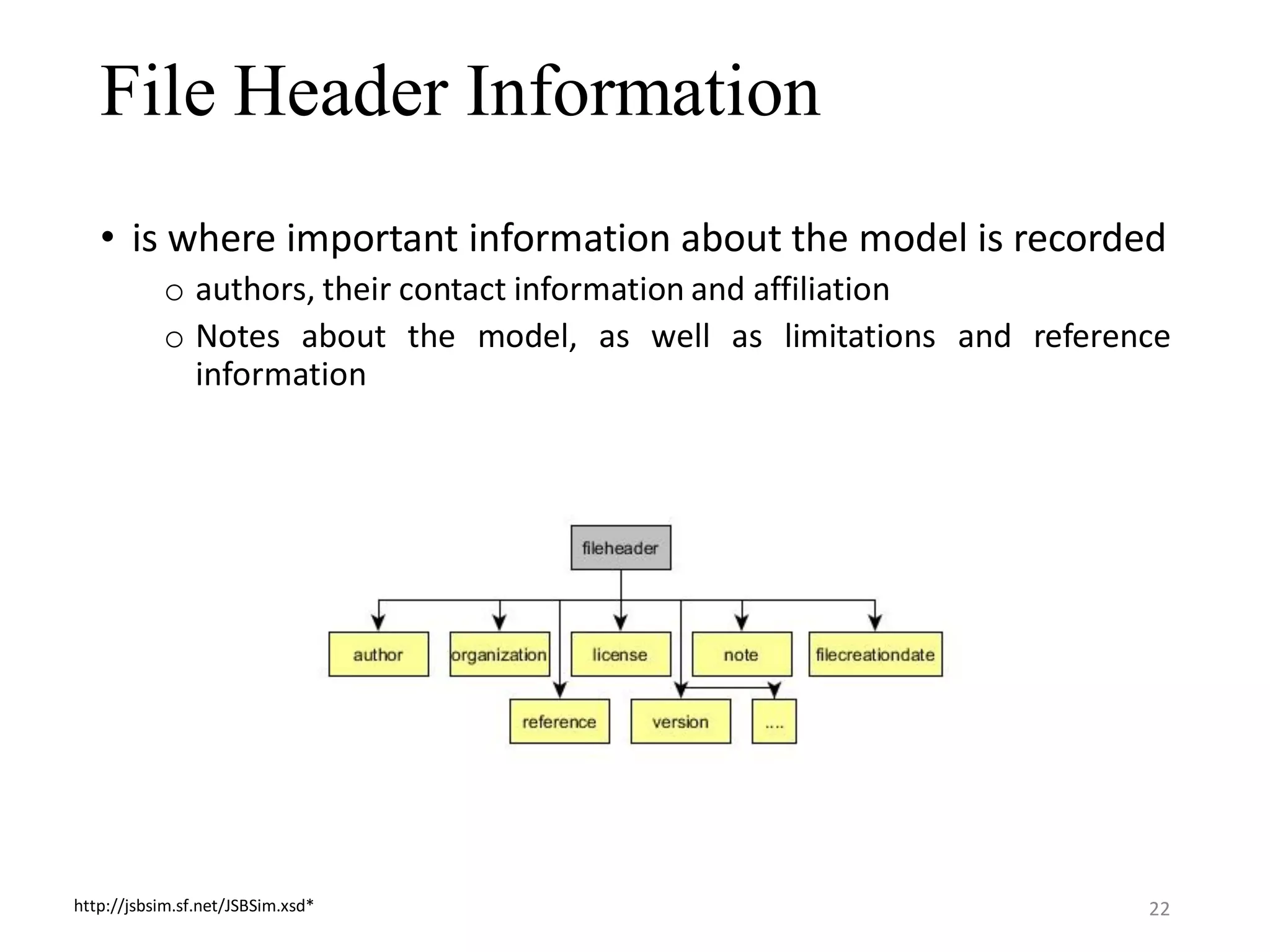
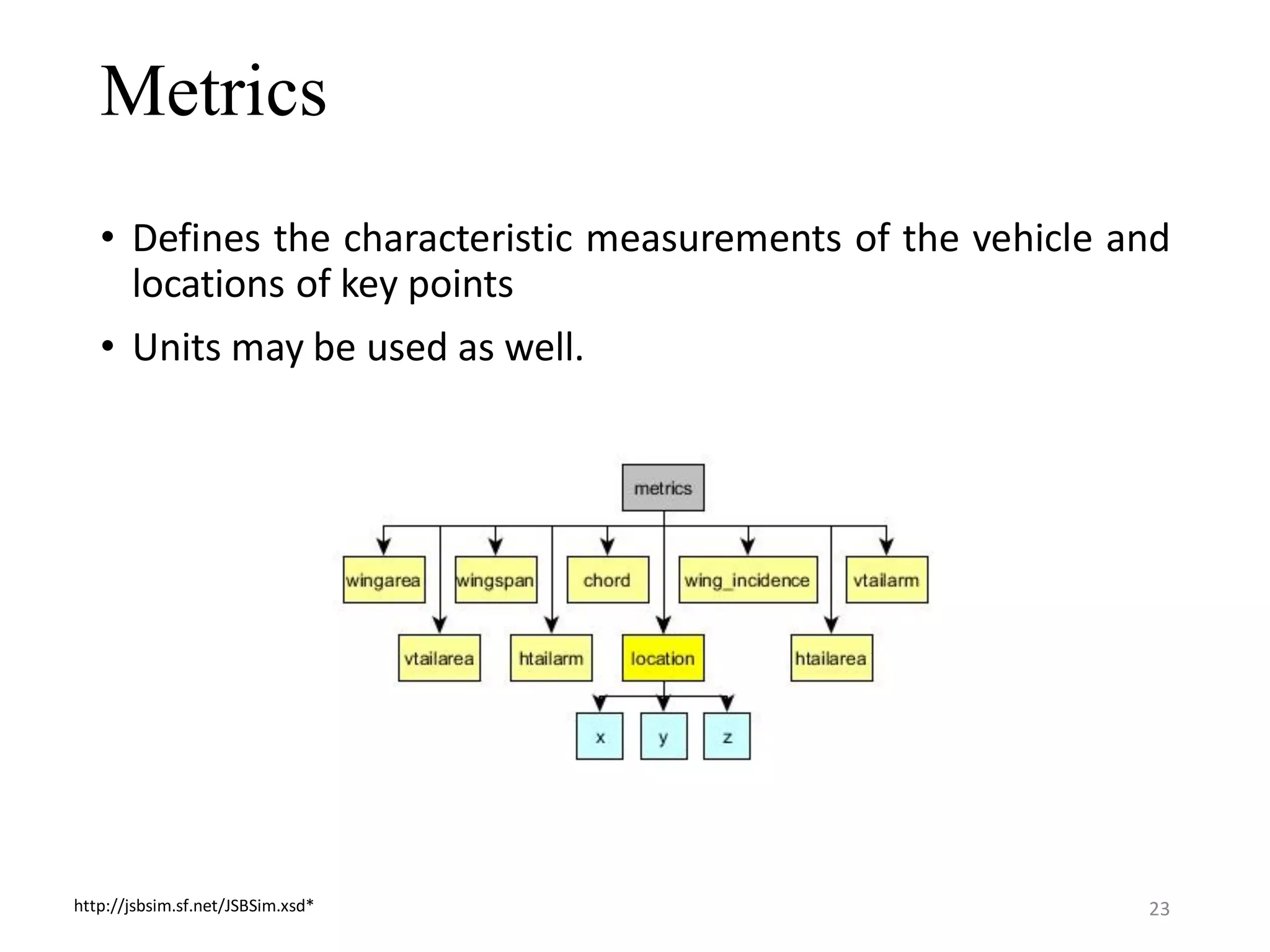
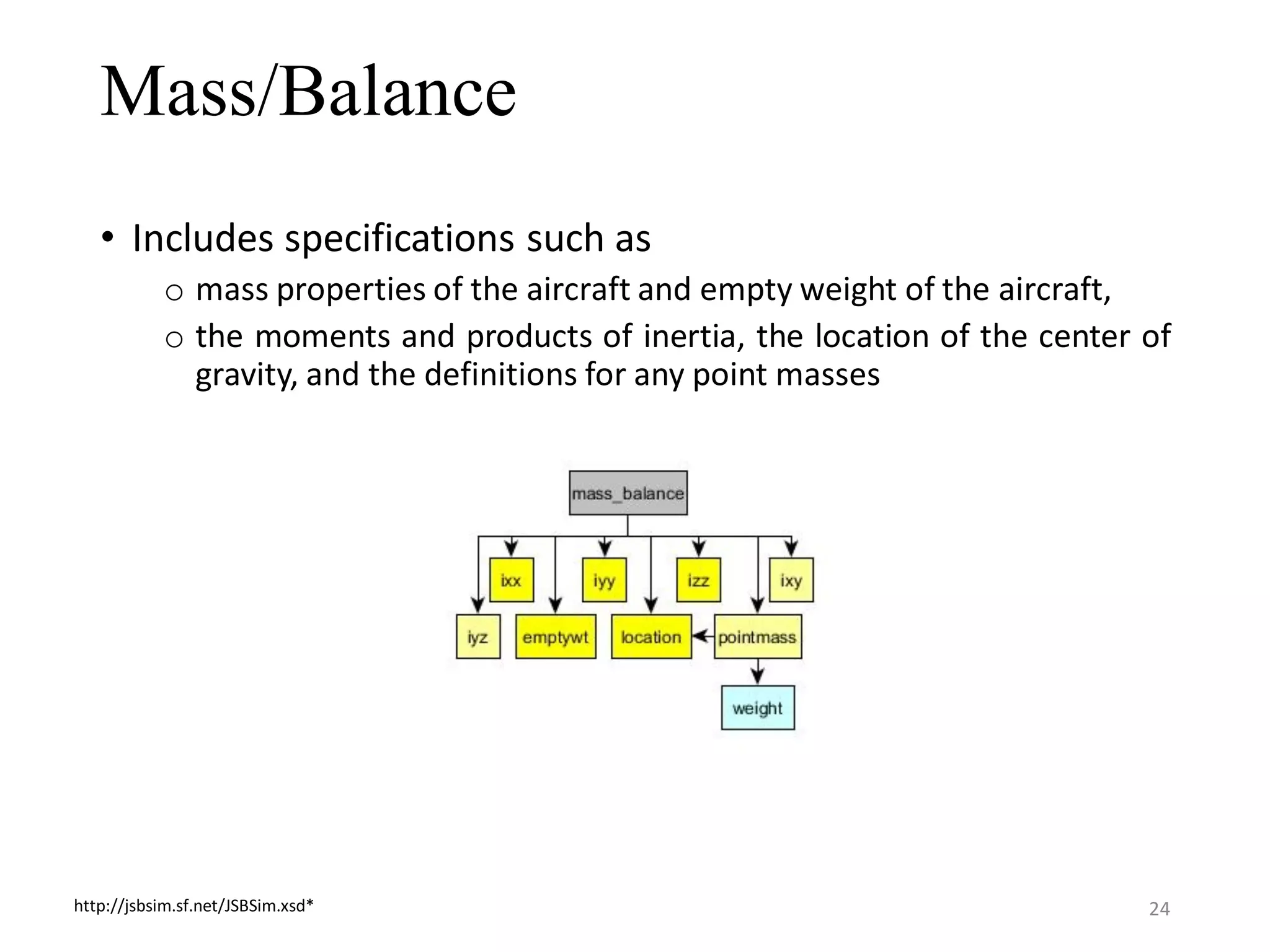
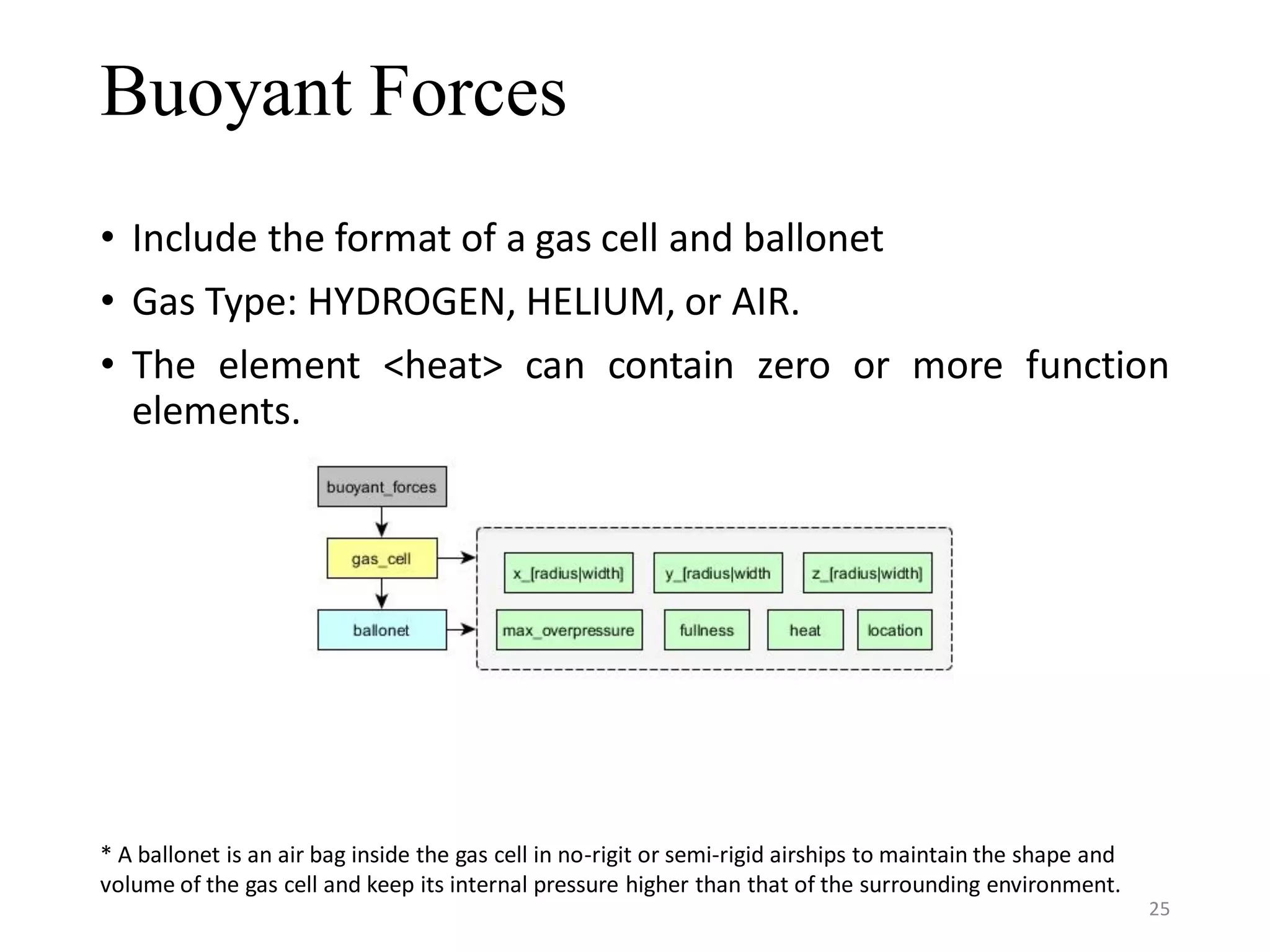
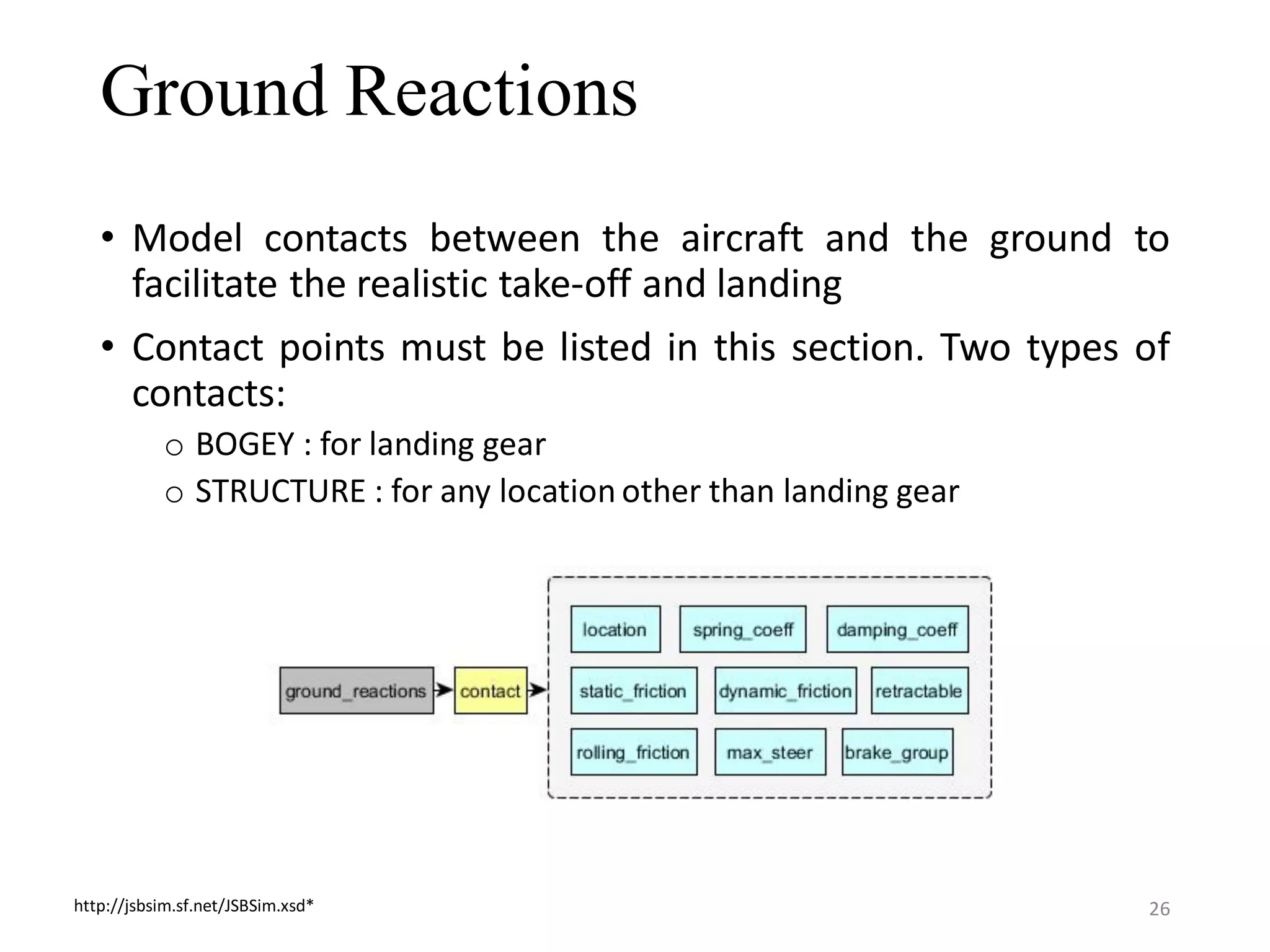
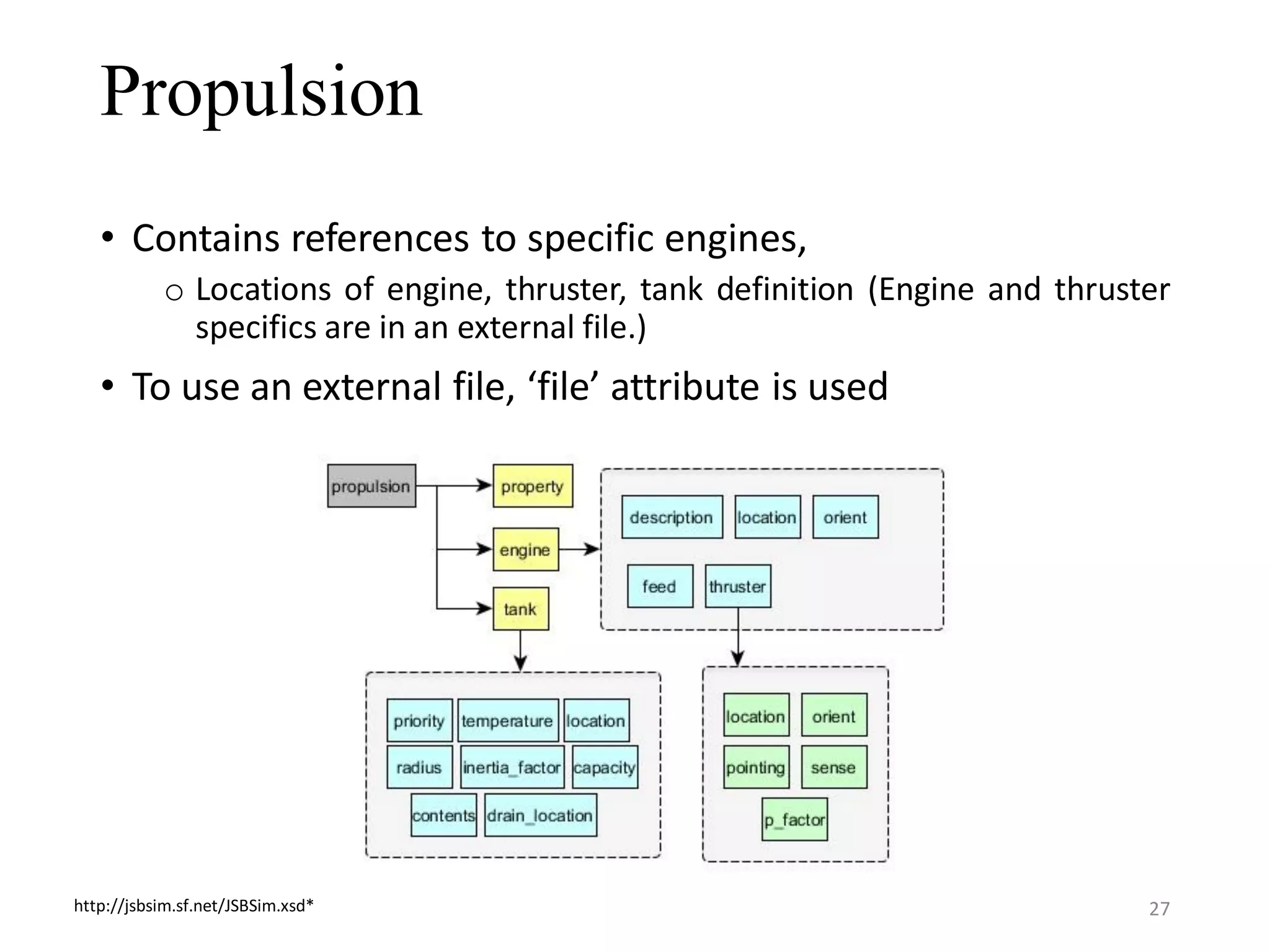
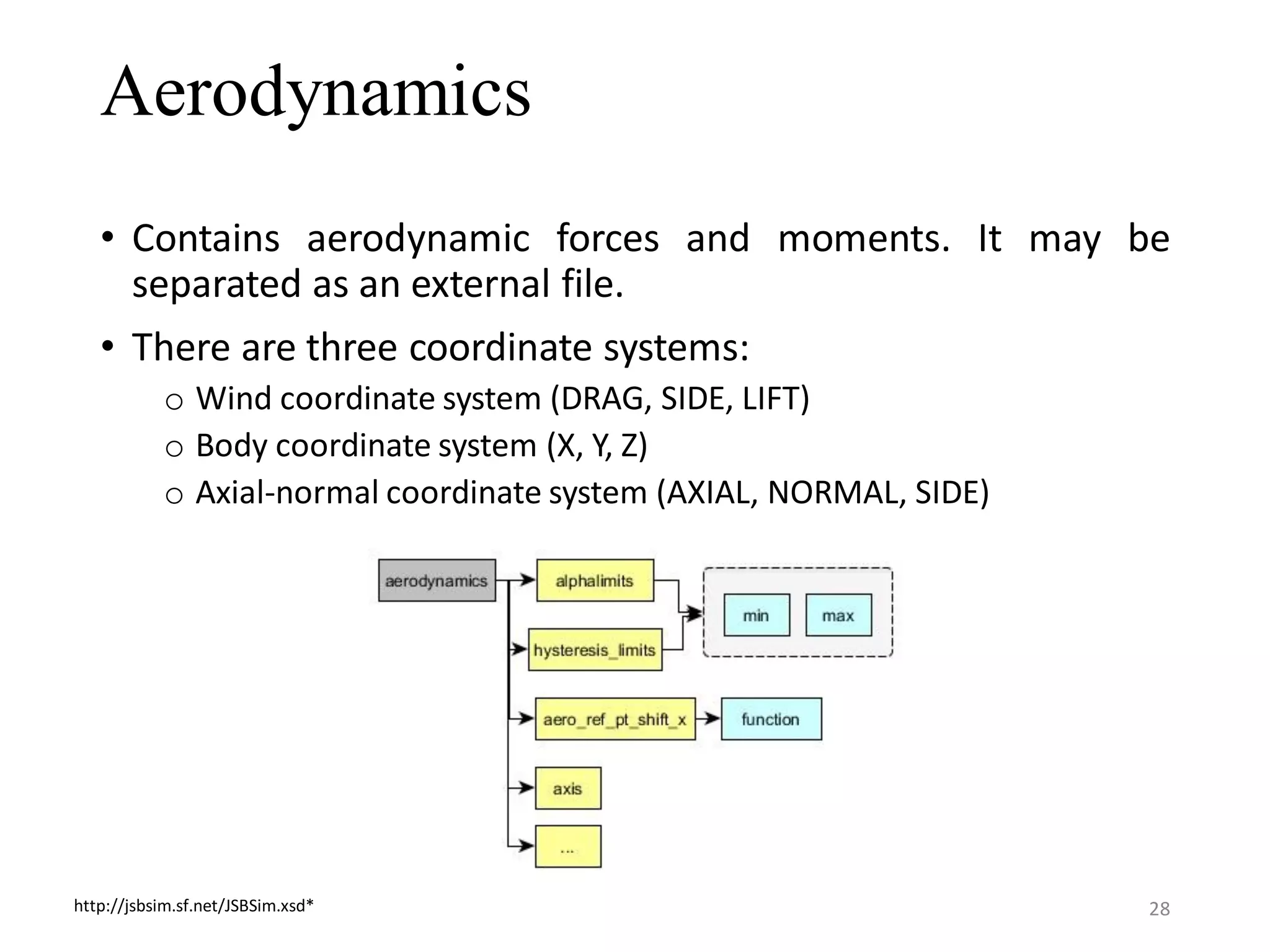
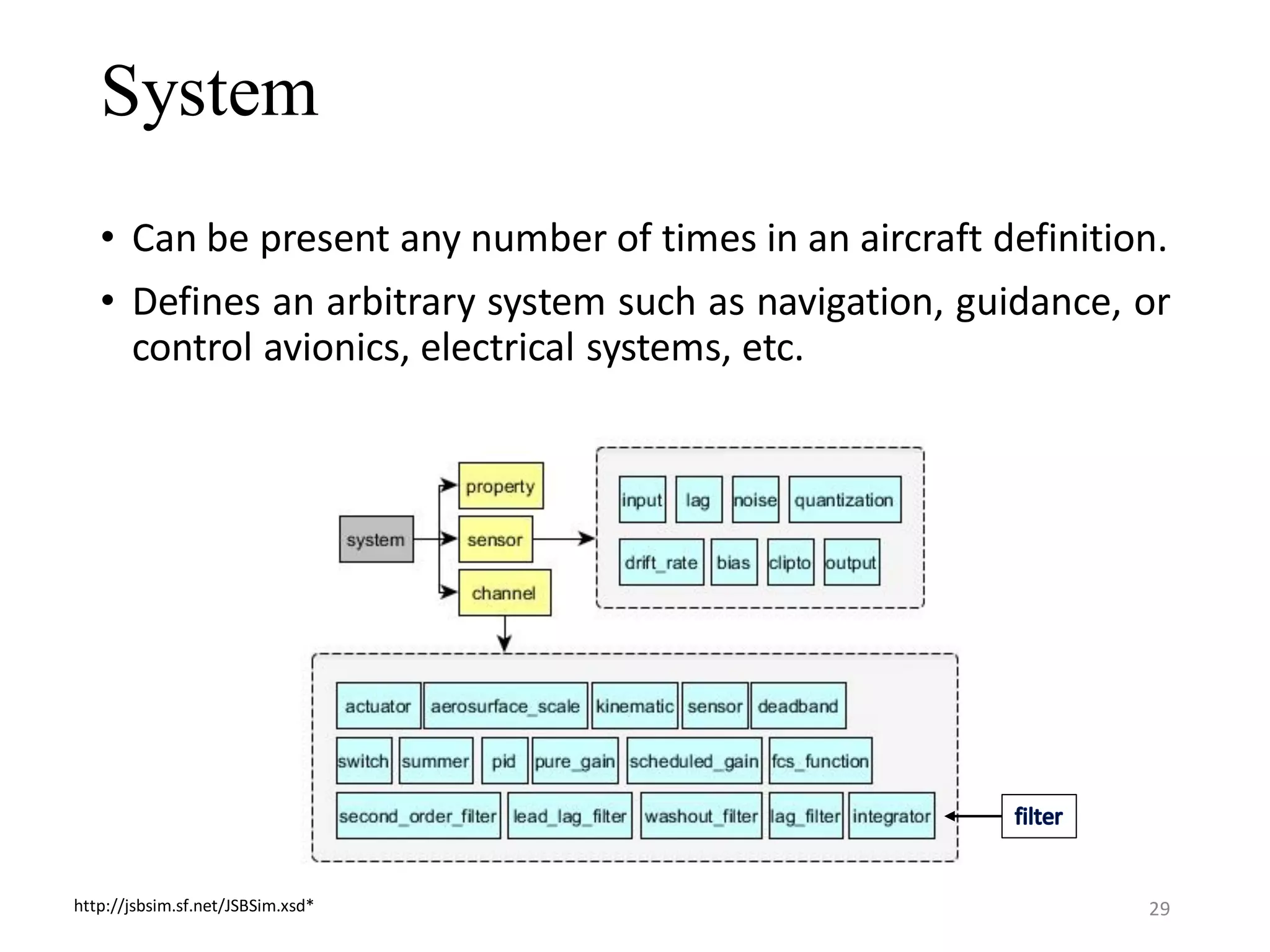
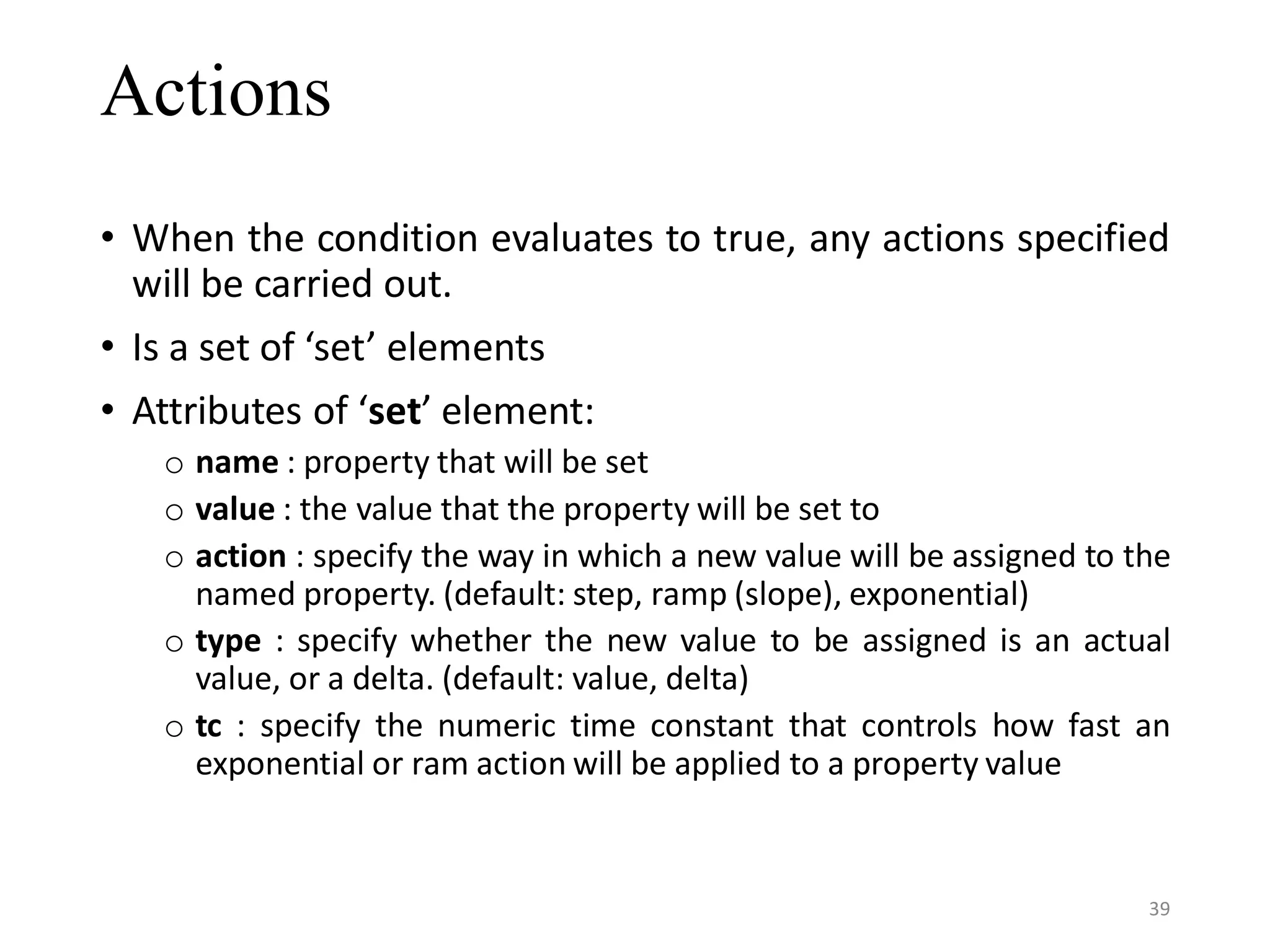
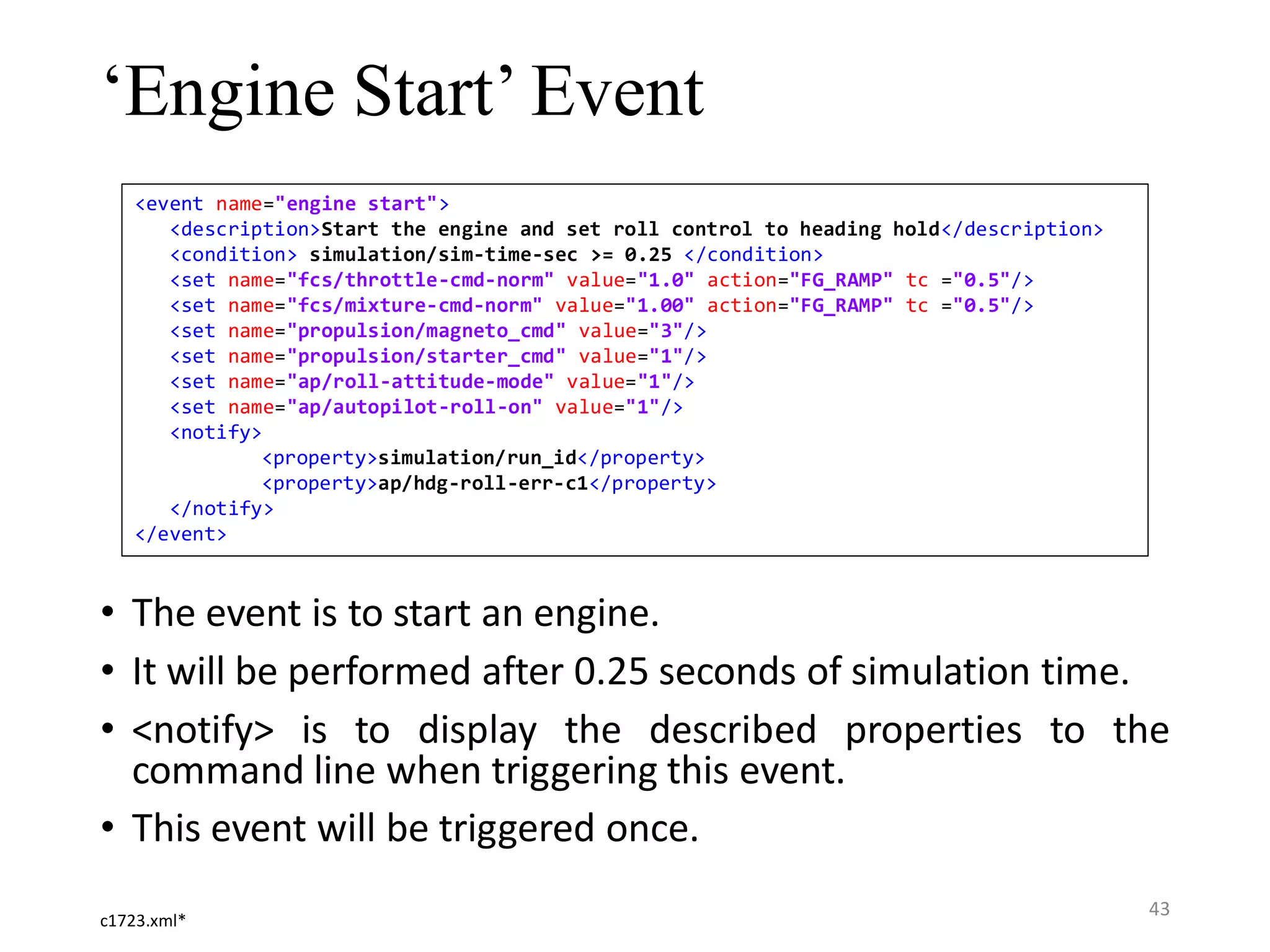
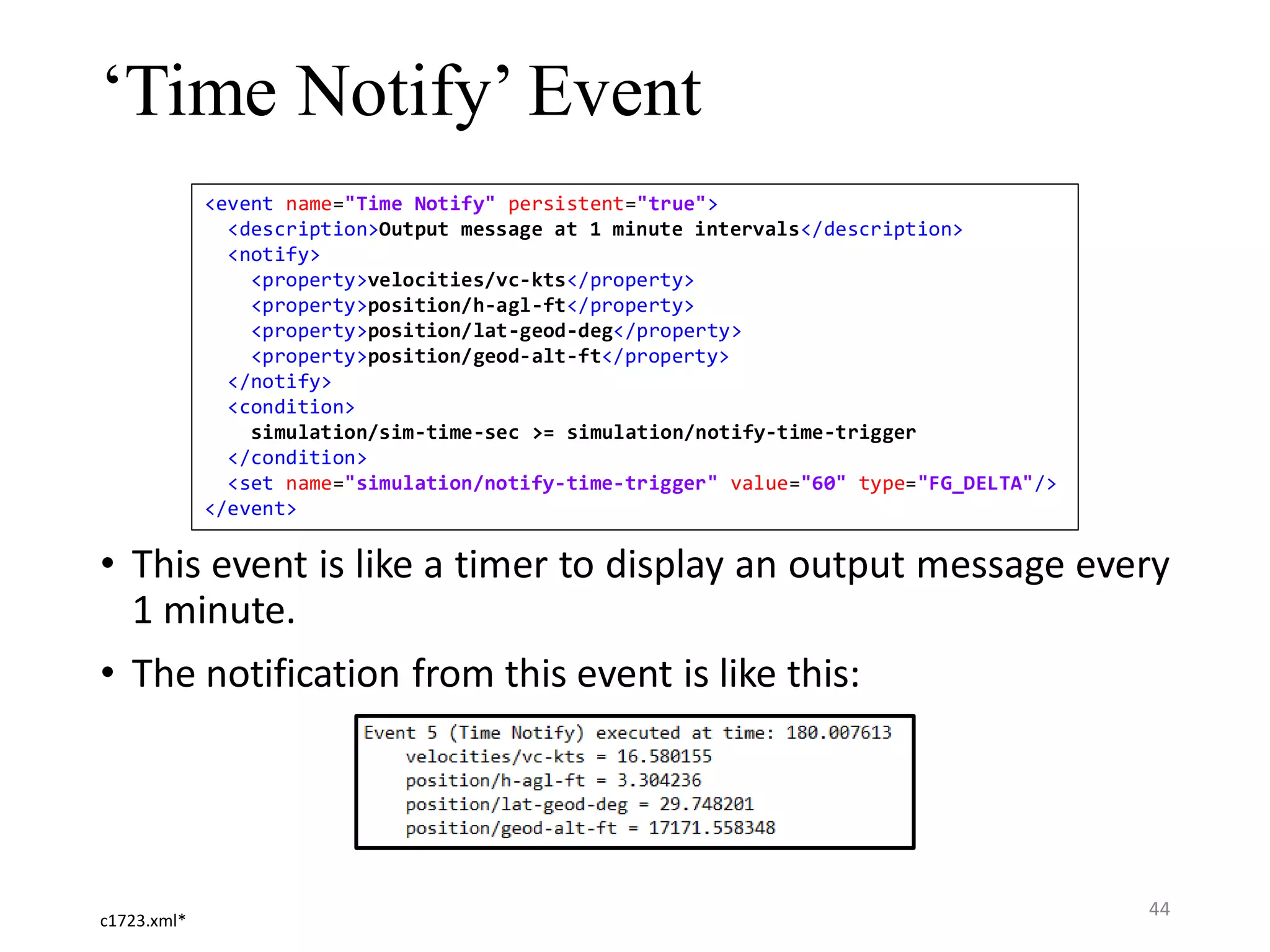
XML is used to define configuration files for JSBSim. These files describe aircraft metrics, mass properties, aerodynamic models, and systems. XML allows hierarchical definition of elements like tables, functions, and components. Runtime input and output is also specified to interface with JSBSim during simulation.