Downloaded 155 times
![GPIO[General Purpose Input Output] These pins are a physical interface between the Pi and the outside world. Seventeen of the 26 pins are GPIO pins; the others are power or ground pins. You can program the pins to interact in amazing ways with the real world. 8](https://image.slidesharecdn.com/seminarchikku-160401025614/75/raspberry-pi-and-robots-8-2048.jpg)

The document discusses a project on controlling a robotic arm via a smartphone using Raspberry Pi and Wi-Fi. It describes the components involved, including the Raspberry Pi, which serves as a micro-computer, and an Android application that acts as a command center for the robotic arm. The conclusion emphasizes the advantages of this wireless control method over traditional wired systems, particularly reducing delays and server issues.
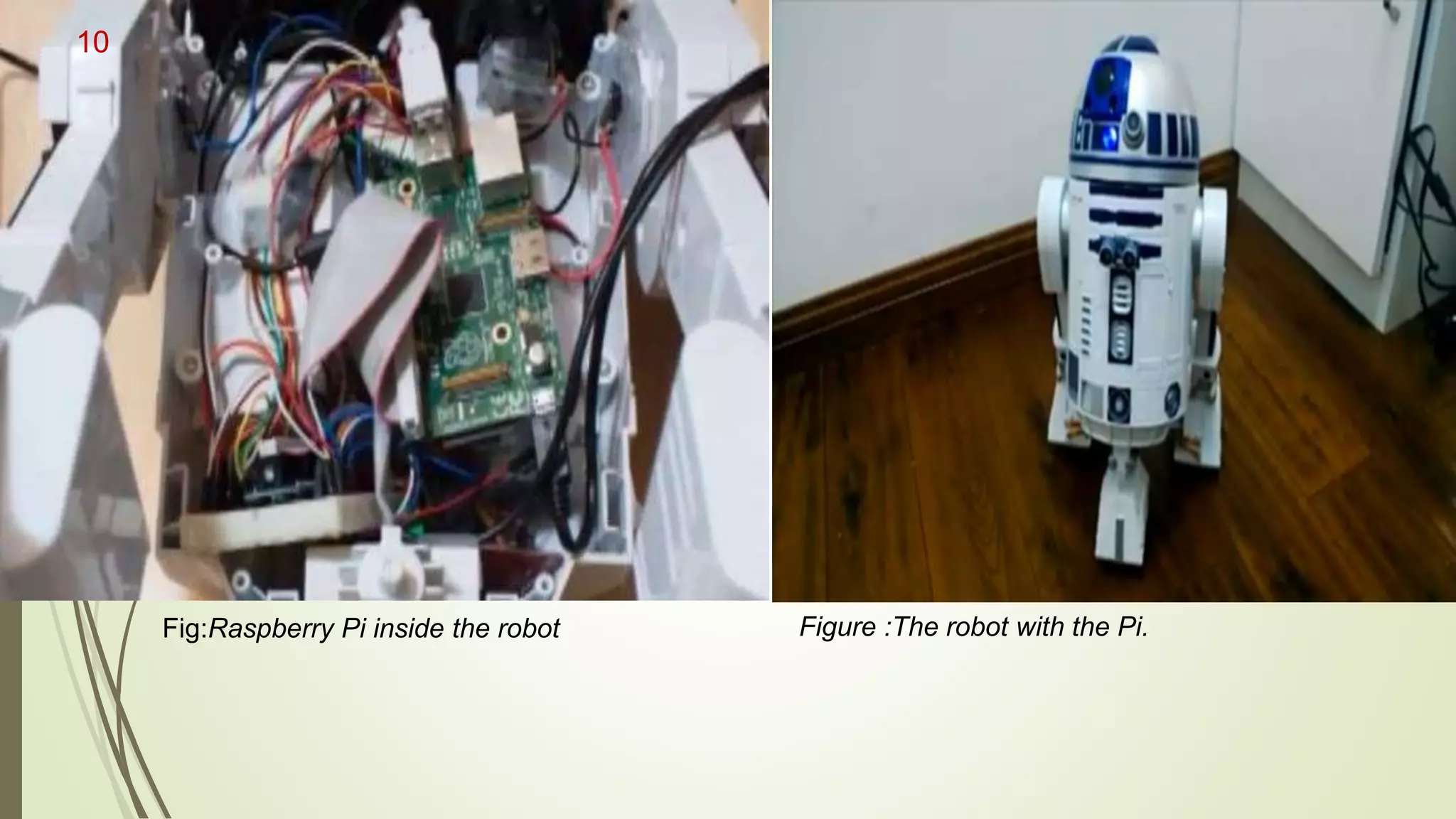
Overview of the project involving a smartphone controlled robotic arm via Raspberry Pi and Wi-Fi.
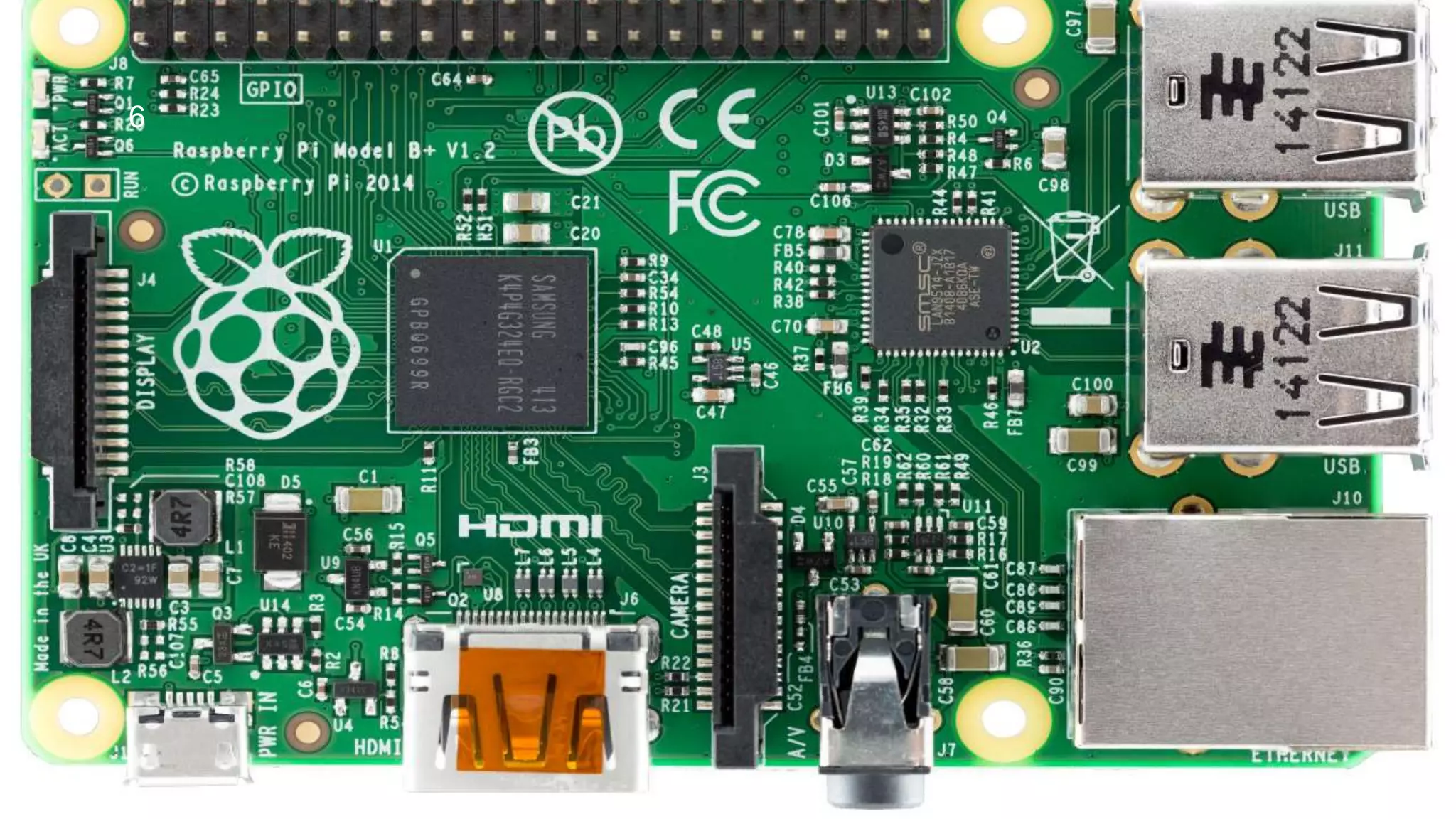
Introduction to Raspberry Pi as a micro-computer, its features, history, and sizes.
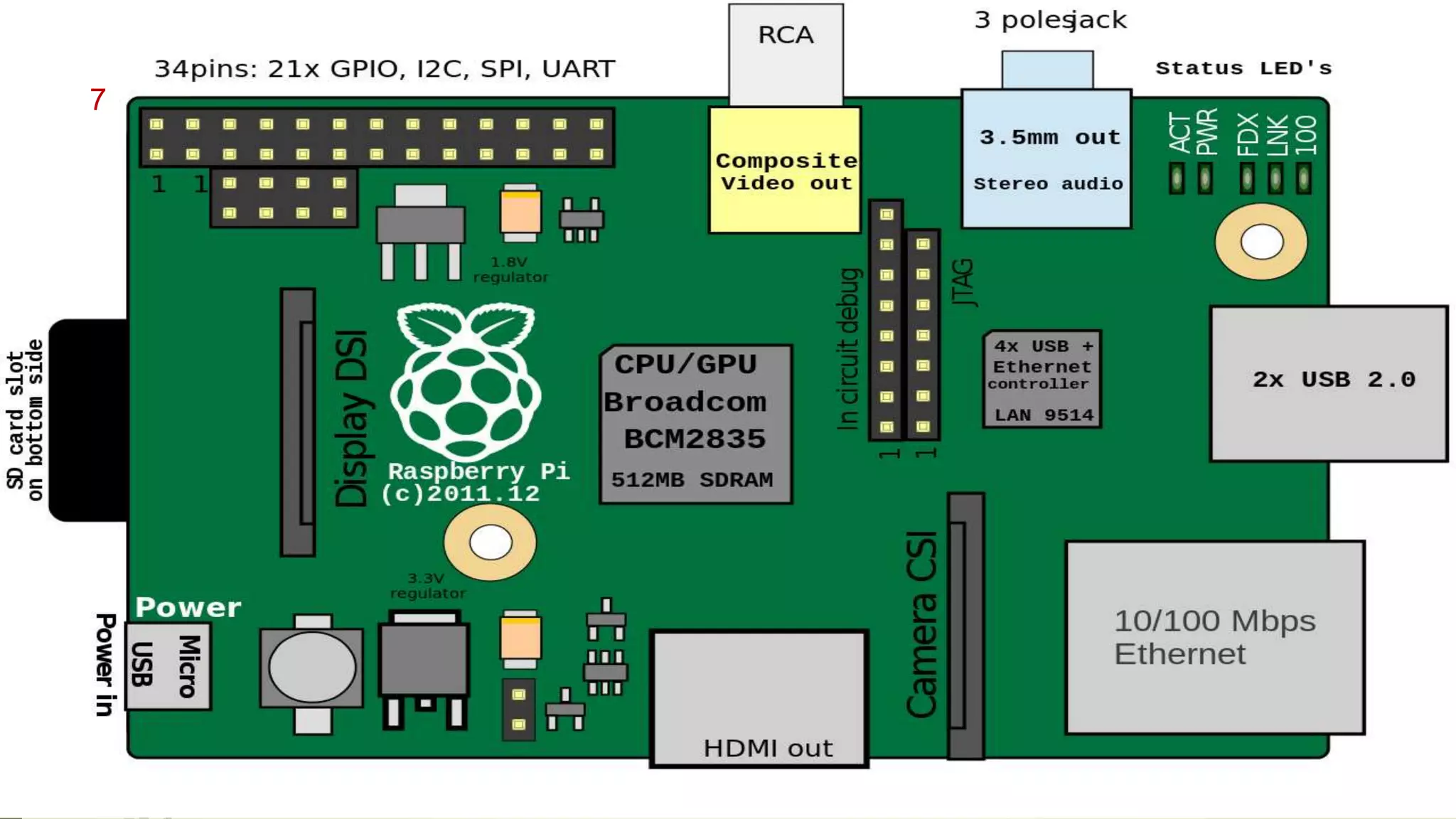
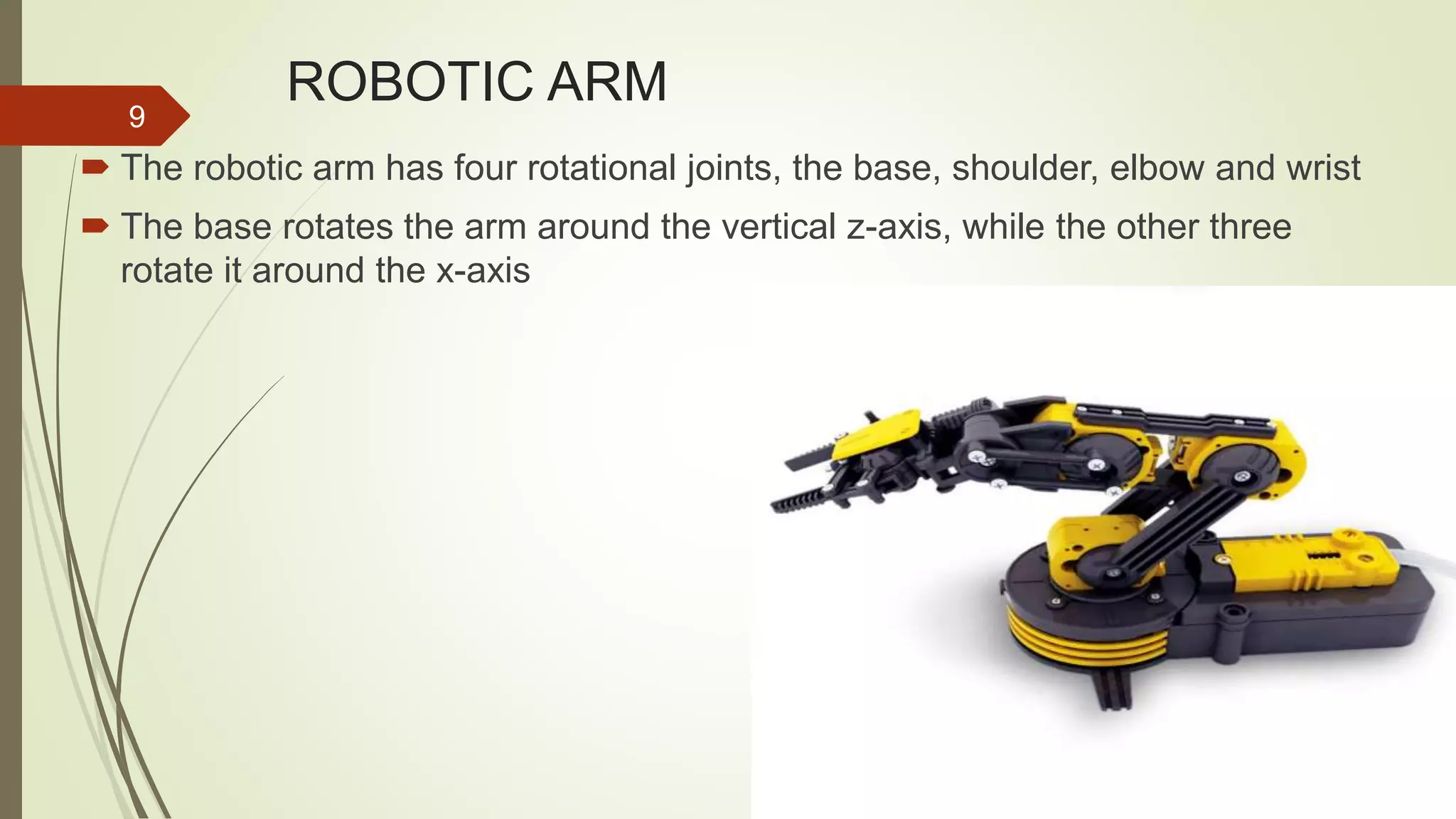
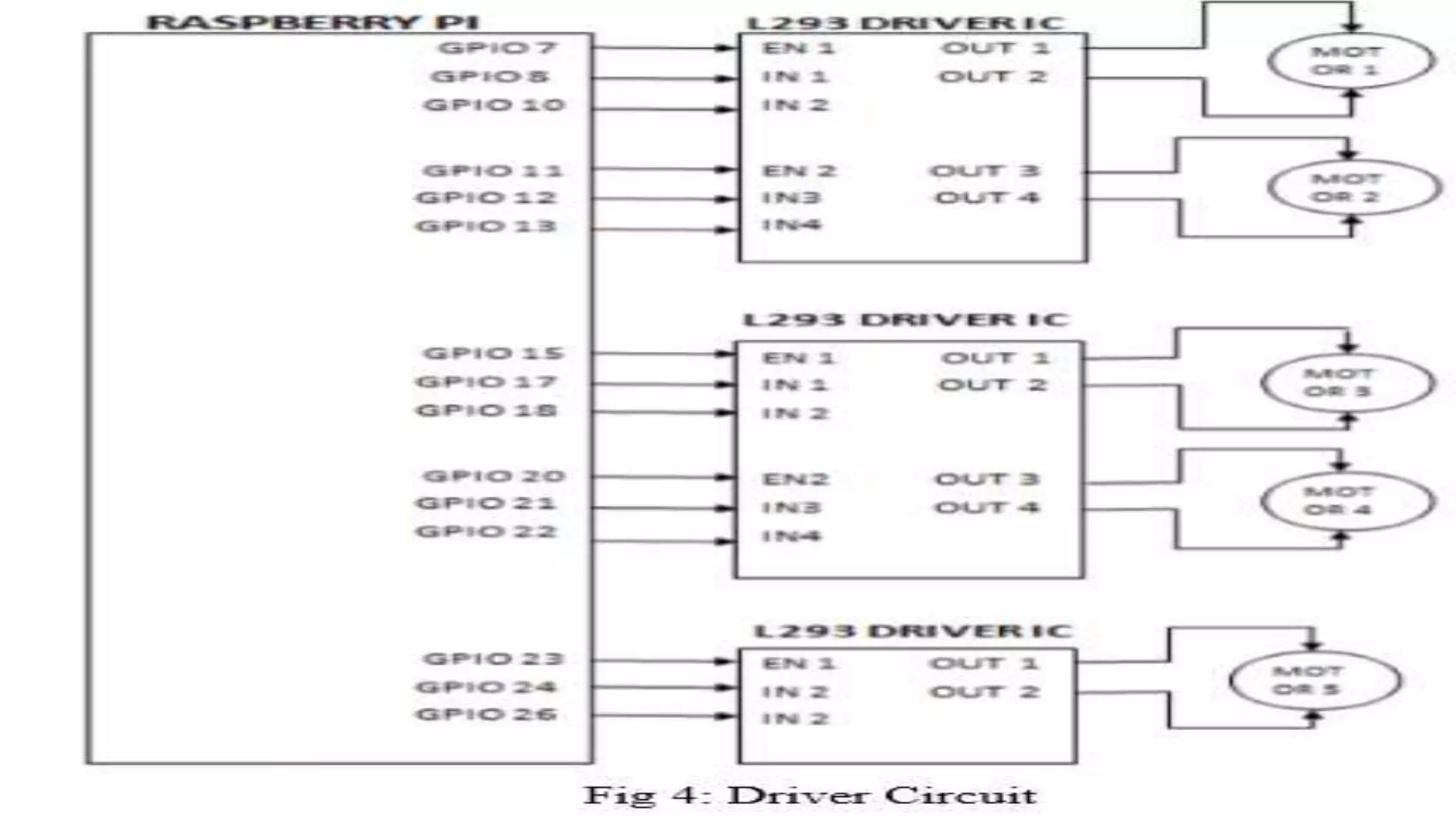
Explanation of GPIO pins as interfaces and functionality of the robotic arm structure.
Details on the Android app's role as a command center, controlling the Raspberry Pi and robotic arm.
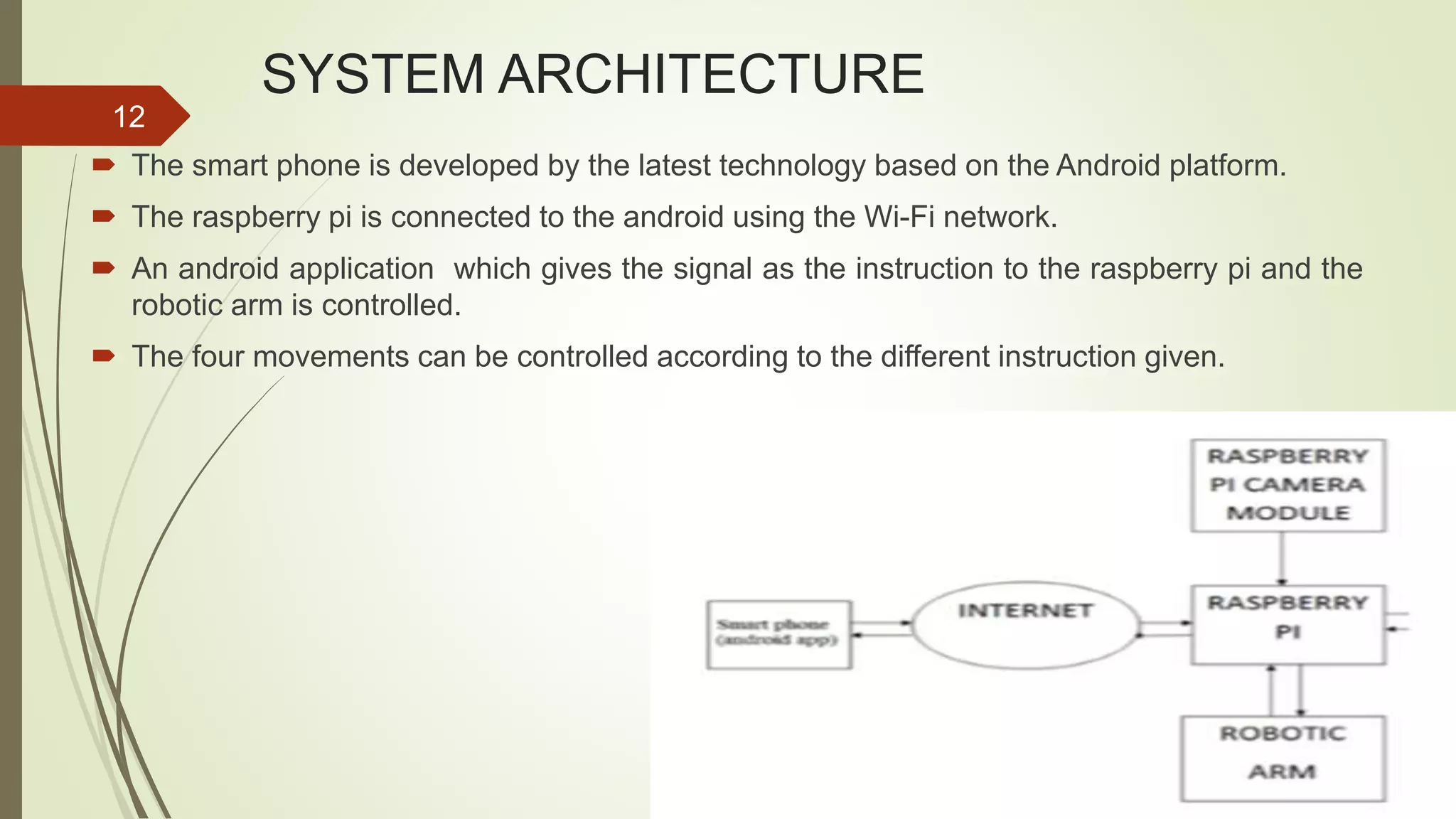
Description of the system architecture and motor control specifics for the robotic arm using Raspberry Pi.
Summary of advantages of using Raspberry Pi for robotic arm control and current system limitations.
List of references for further reading and a thank you slide inviting questions.