Download to read offline
![International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 09 Issue: 07 | July 2022 www.irjet.net p-ISSN: 2395-0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page 1315 Fig 13: Complete model of robotic car REFERENCES [1] www.electronicsforu.com [2] www.circuitdigest.com/webcontrolled robotic surveillance car [3] International general of Computer Applications – March 2015 [4] International Journal of Emerging Technology and Advanced Engineering [5] Website: www.ijetae.com(ISSN 2250-2459,Journal, Volume 5, Issue 10, October 2015) BIOGRAPHIES Author 1 : Abhishek C C, I am currently pursuing B.E Degree in Electical and Electronics Engineering in the year 2022 from Rajeev institute of technology ,Hassan-573201,Karnataka. Email: abhicc2000@gmail.com Author 2 : Chethan G D, I am currently pursuing B.E Degree in Electical and Electronics Engineering in the year 2022 from Rajeev institute of technology ,Hassan-573201,Karnataka. Email: chethangd5@gmail.com Author 3 : Mr.Arjun joshi received the B.E. degree in Electrical and Electronics Engineering in the year 2019 from SDMinstitute of technology ujire and Post-graduation degree in Power System Engineering from The National Institute of Engineering (NIE), Mysore in the year 2021.he is workingas Assistant professor in department of Electrical and Electronics Engineering at Rajeev institute of technology Hassan Karnataka. He has 01 years of teaching experience. He published one International Journals. His research interest includes Power System Operational Planning and Control, Distribution System Network Reconfiguration, Service Restoration, Distribution System Automation and Distribution Generation, electric vehicle technologies, power quality.](https://image.slidesharecdn.com/irjet-v9i7248-221022095600-1b1f52cf/75/IOT-BASED-ROBOTIC-CAR-USING-RASPBERRY-5-2048.jpg)

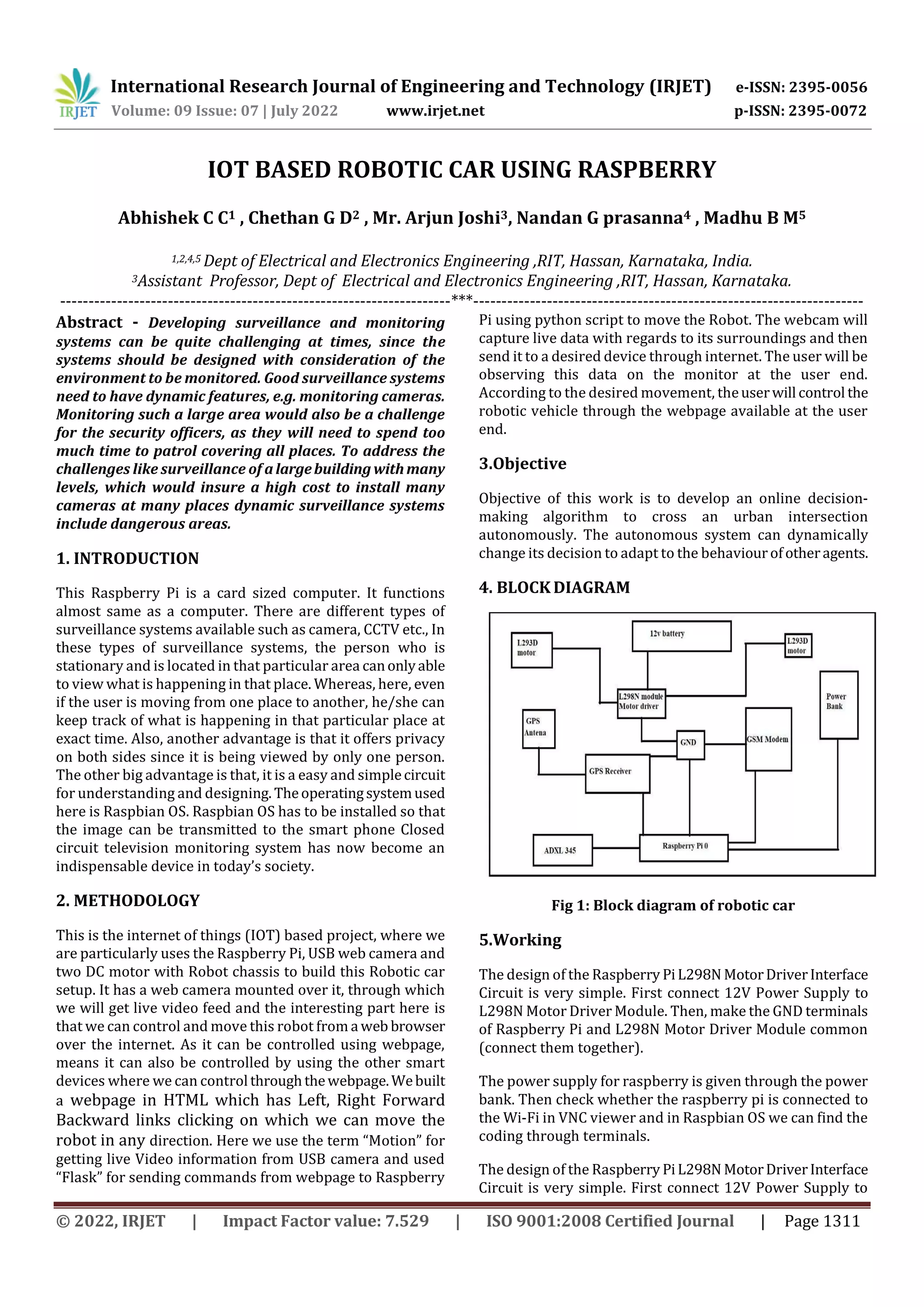
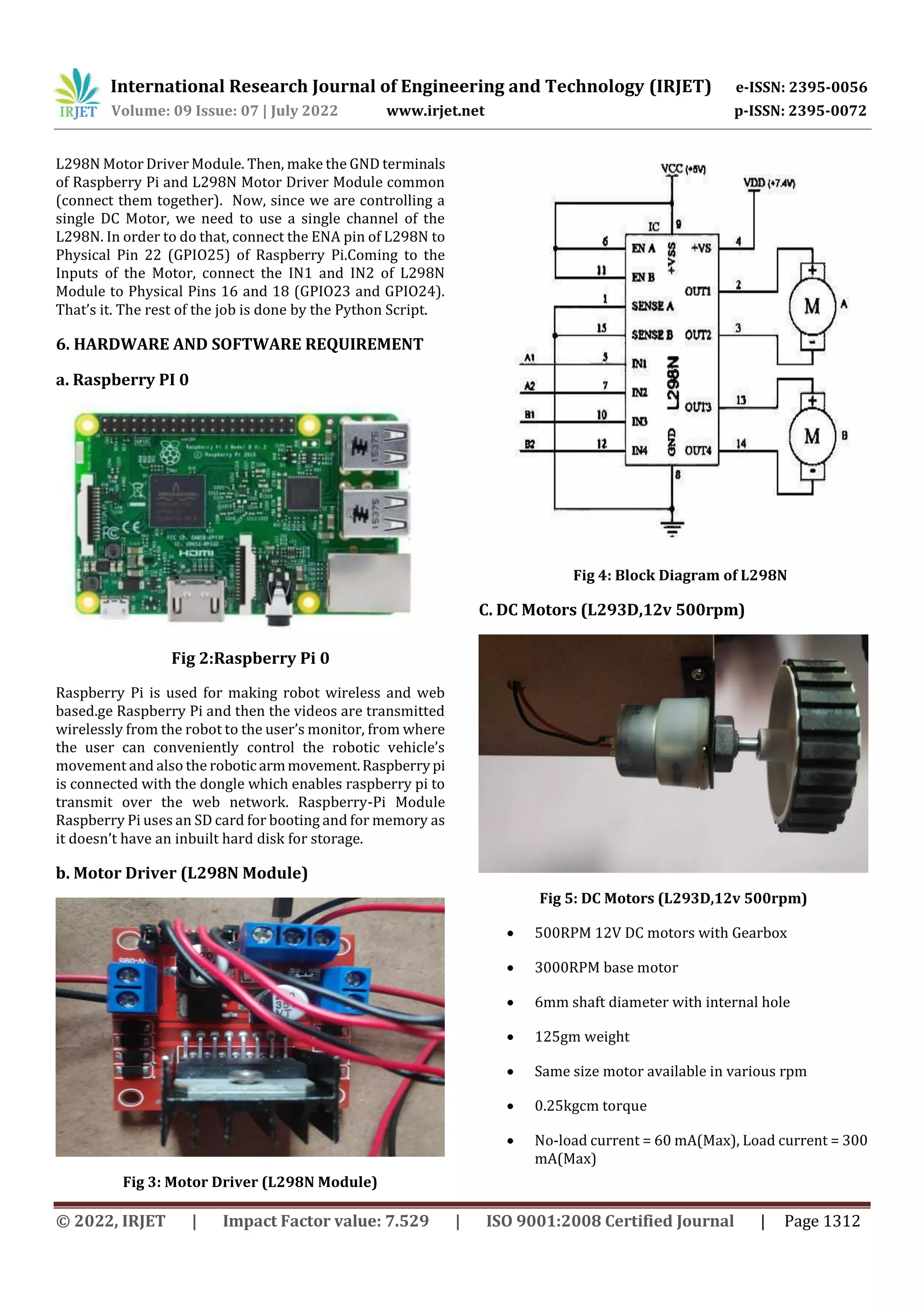
This document describes the design and implementation of an IoT-based robotic car controlled via a web interface. The robotic car is built using a Raspberry Pi single-board computer with a USB webcam mounted on top. The Raspberry Pi runs Raspbian OS and is connected to two DC motors via an L298N motor driver. This allows the car to be physically controlled from a web page, allowing remote monitoring and control. Video from the webcam is streamed to the web interface, and buttons on the page allow the user to move the car forward, backward, left and right by sending commands from the web page to the Raspberry Pi via Flask. The overall goal is to allow remote monitoring and control of the robotic vehicle