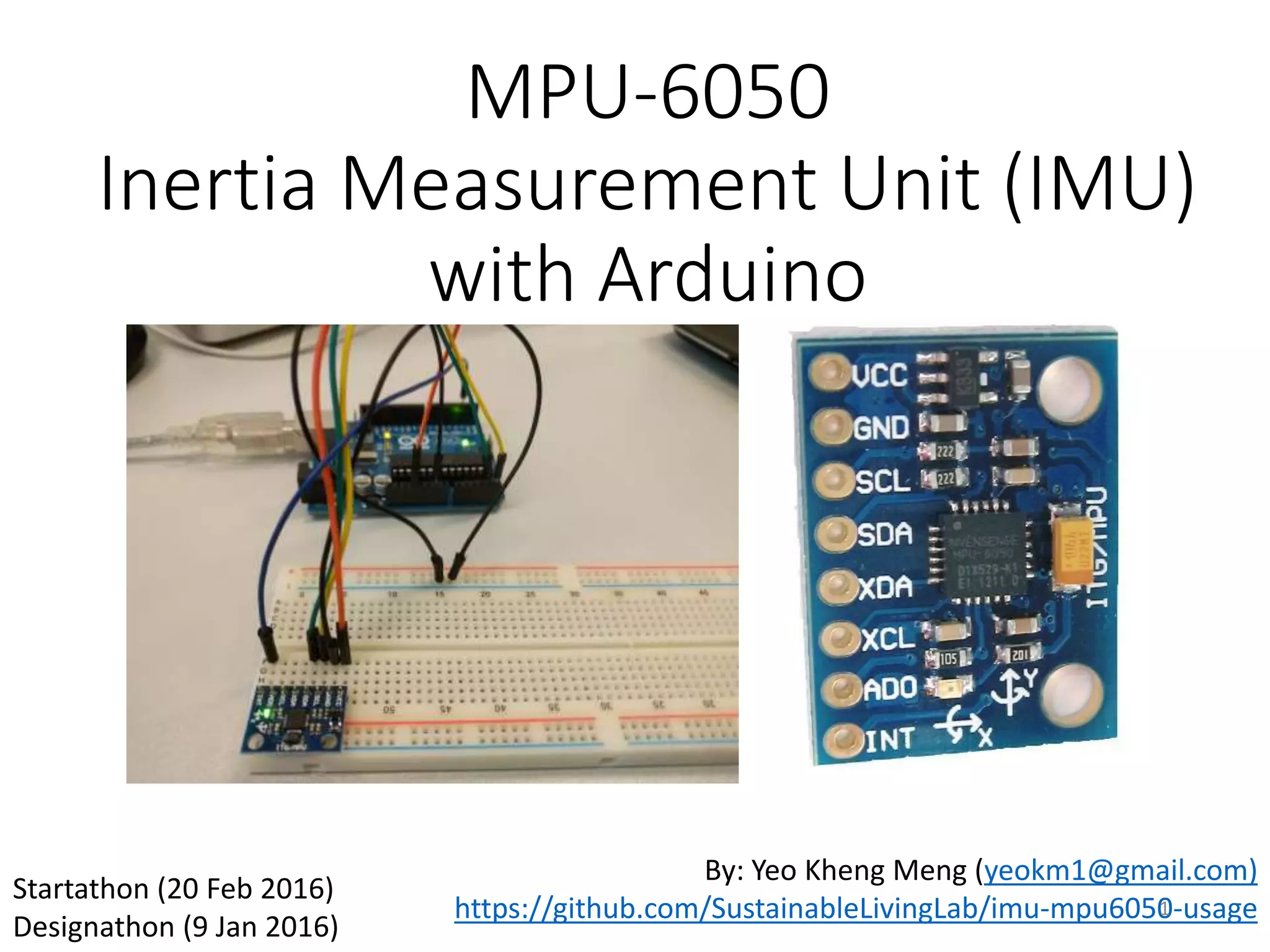
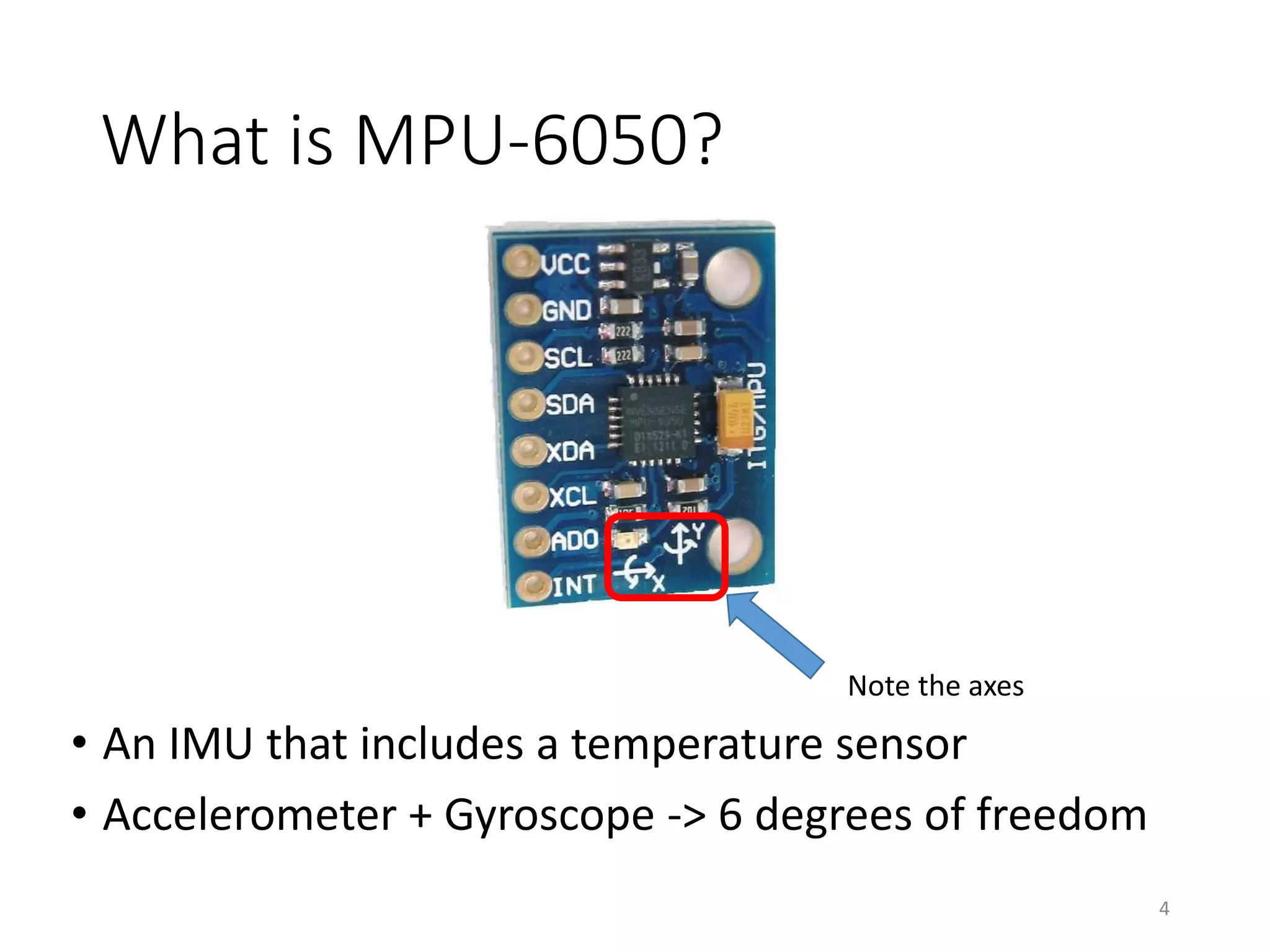
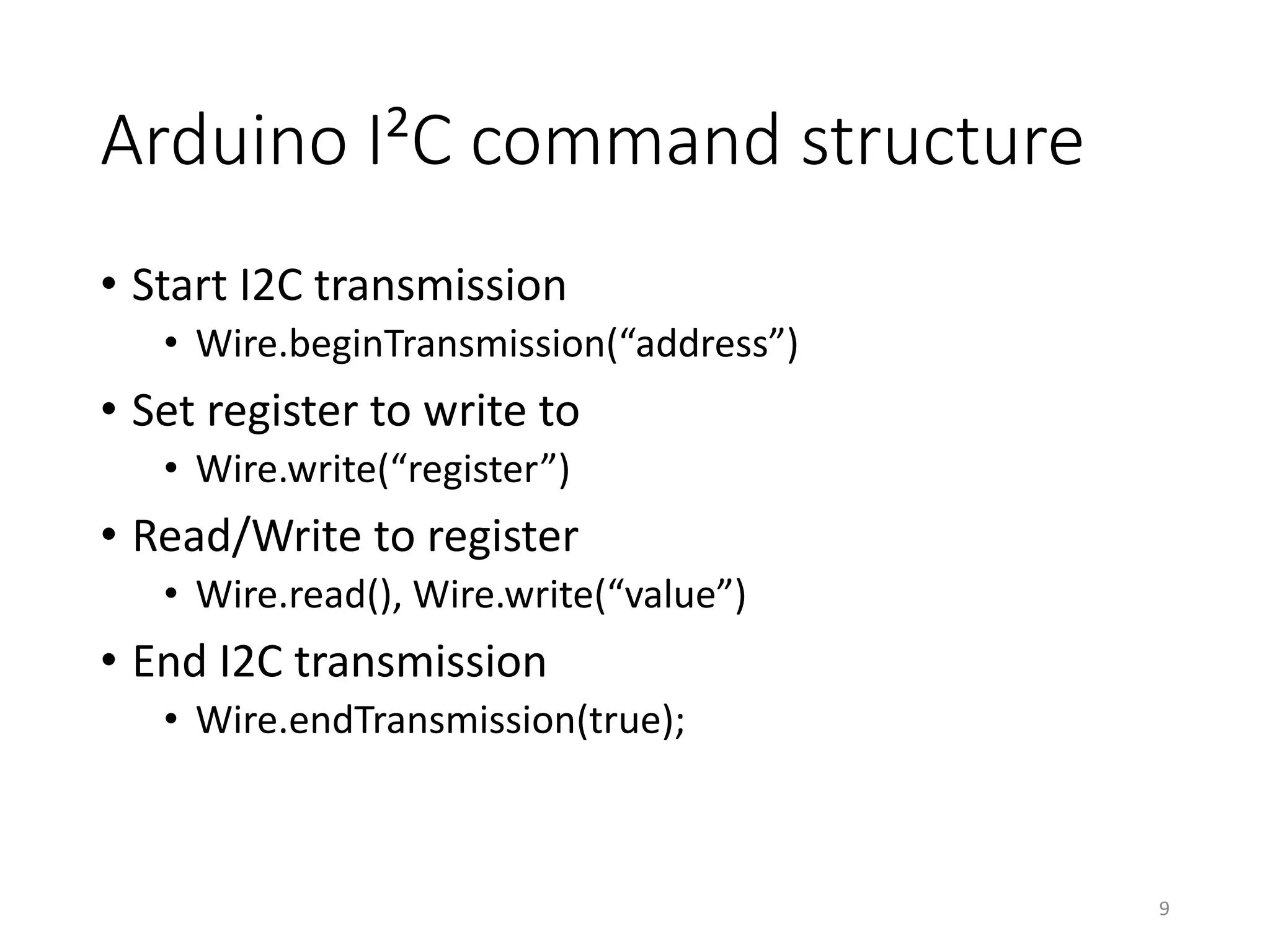
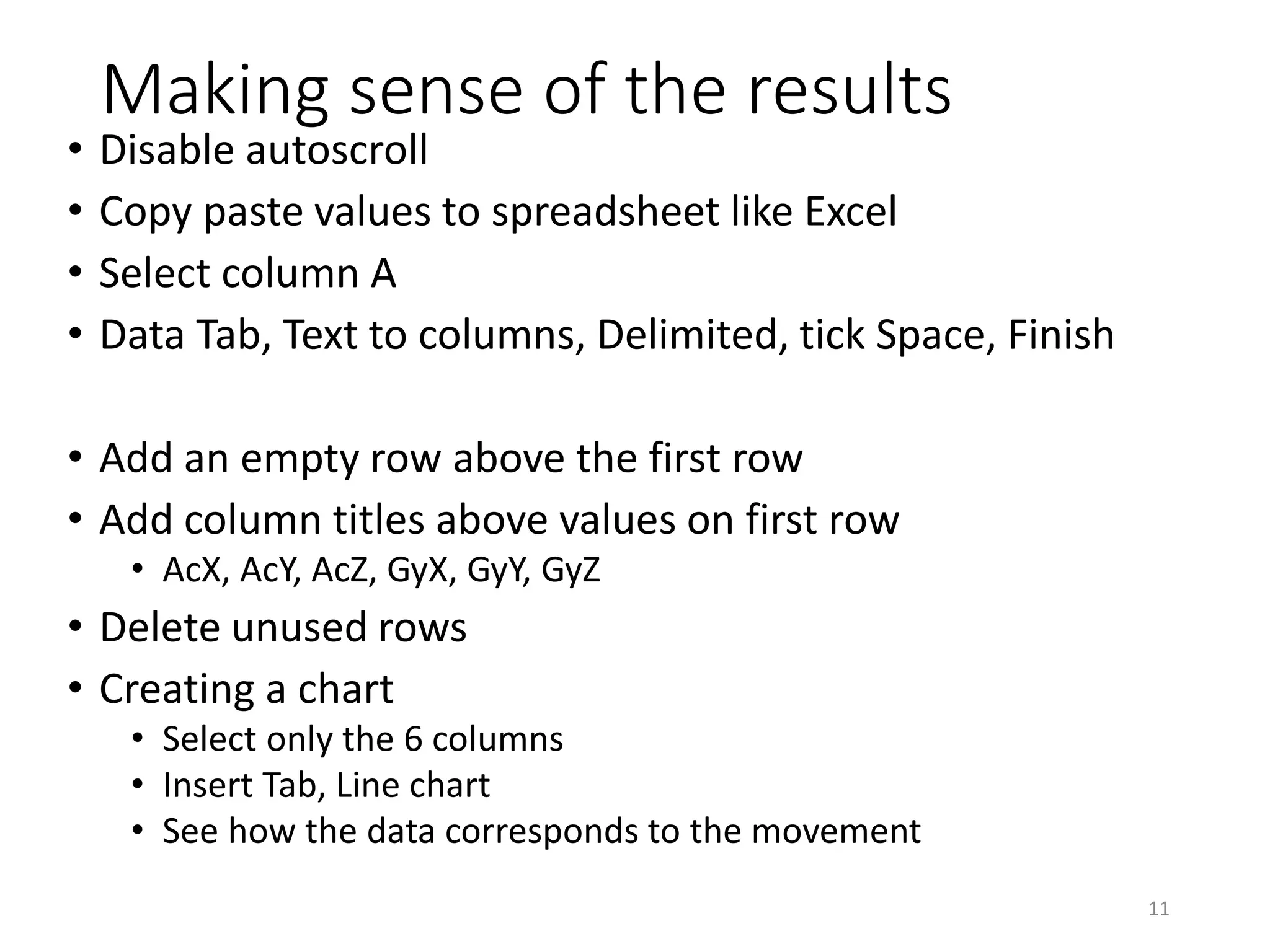
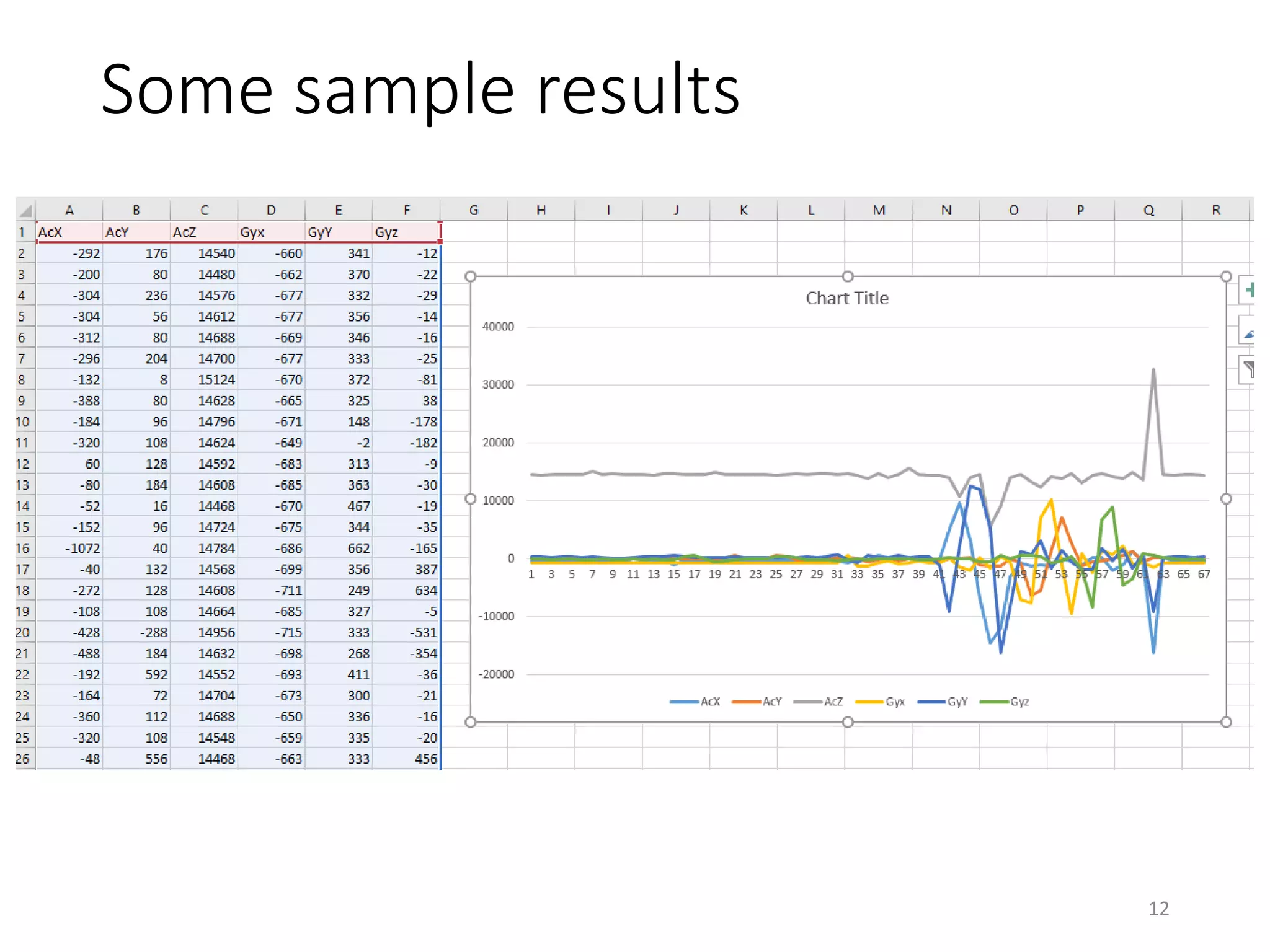
The document provides a detailed guide on using the MPU-6050 Inertia Measurement Unit with Arduino, including necessary equipment and connectivity instructions. It explains the concept of an Inertia Measurement Unit, the functionality of the MPU-6050, and details on implementing I2C communication between components. Additionally, it outlines how to analyze and visualize data obtained from the MPU-6050 using software tools.