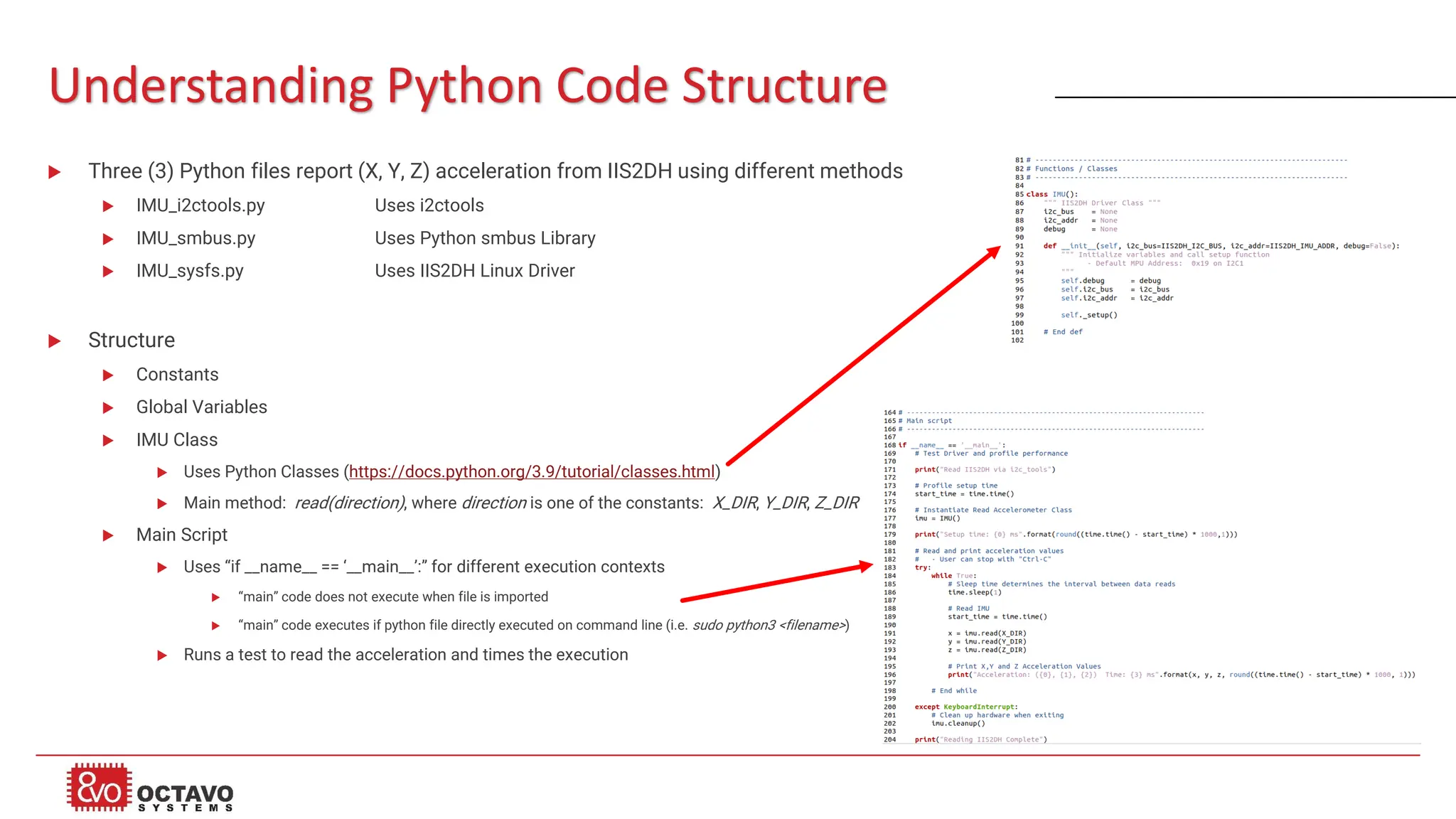
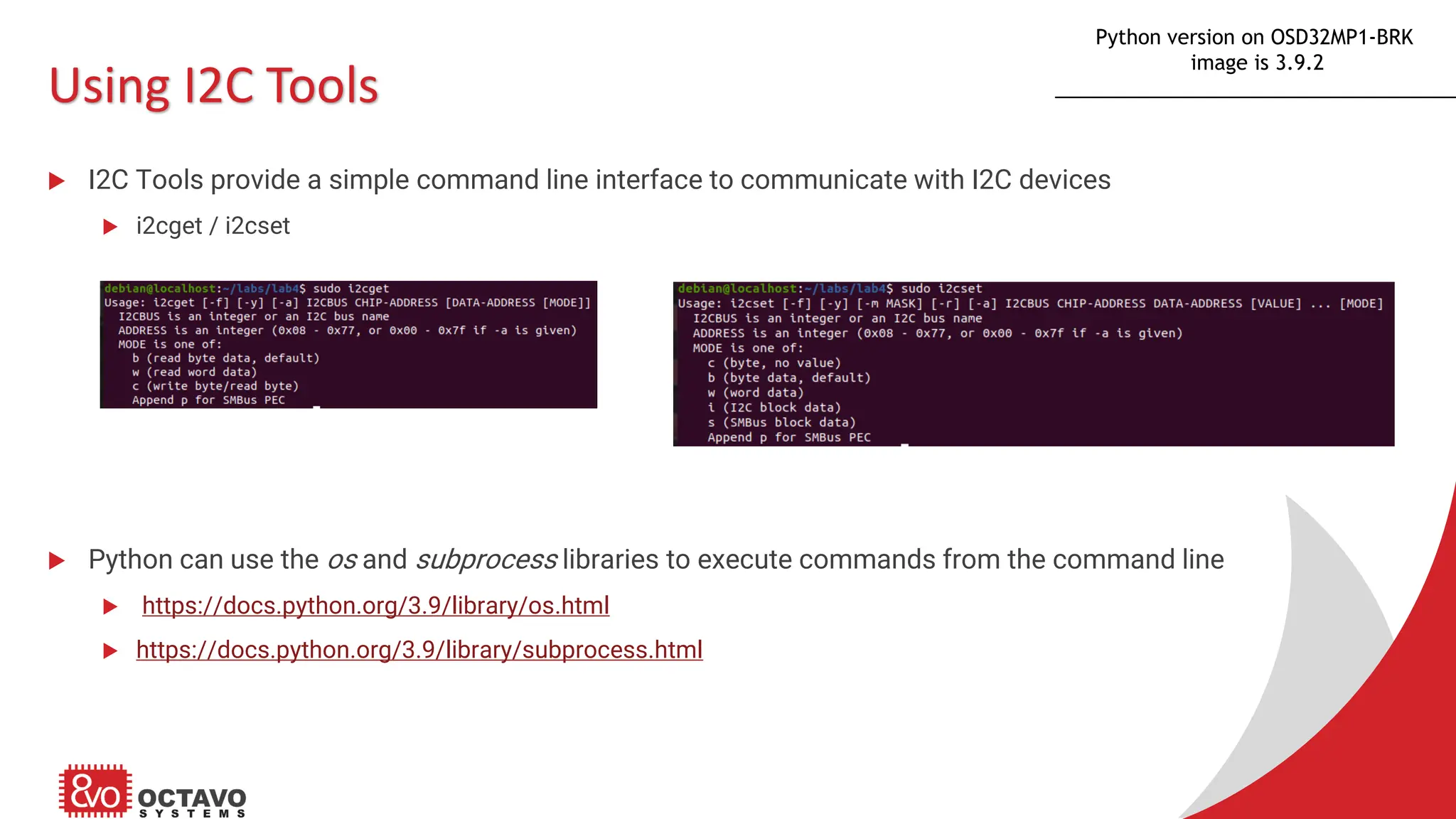
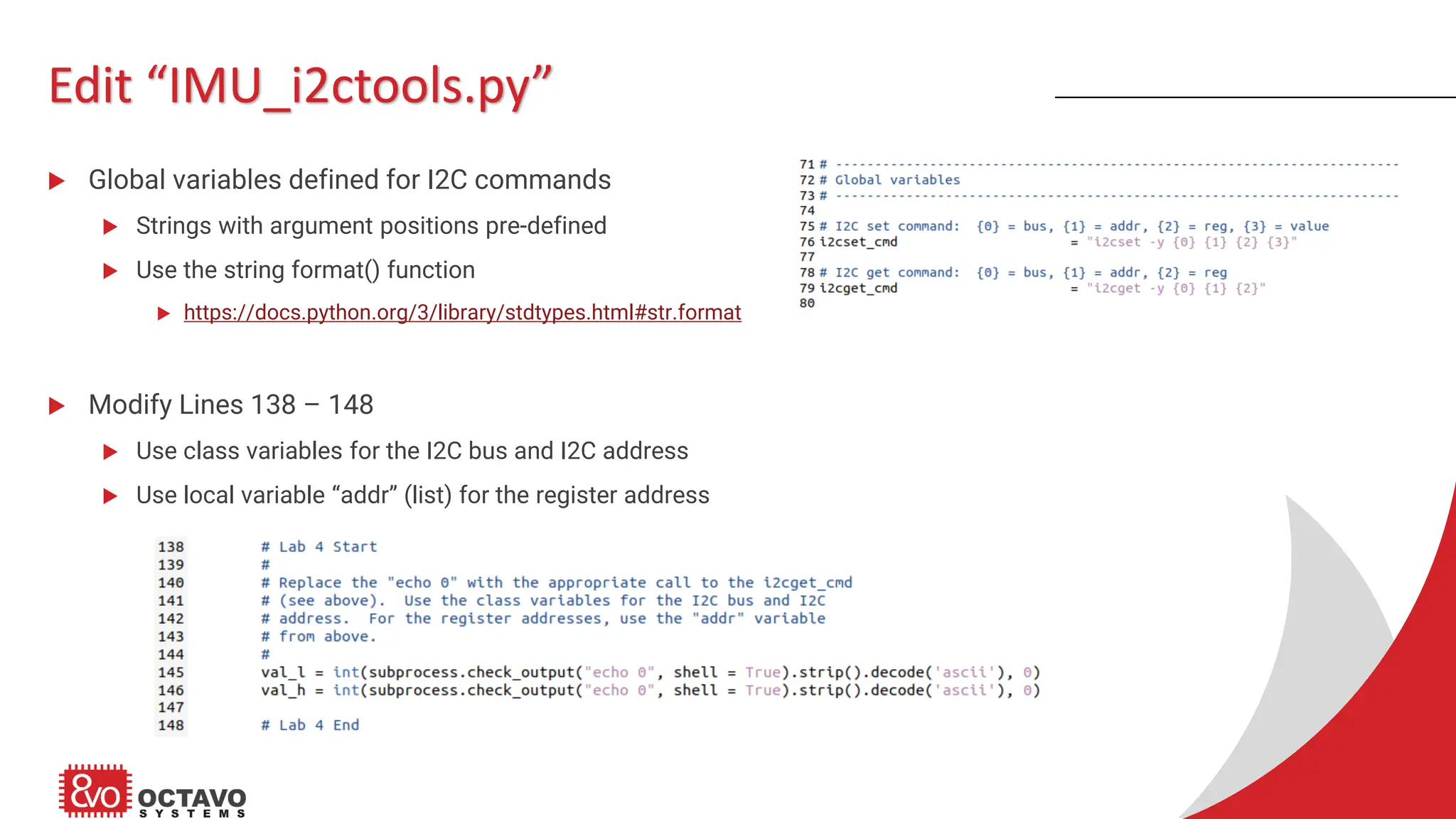
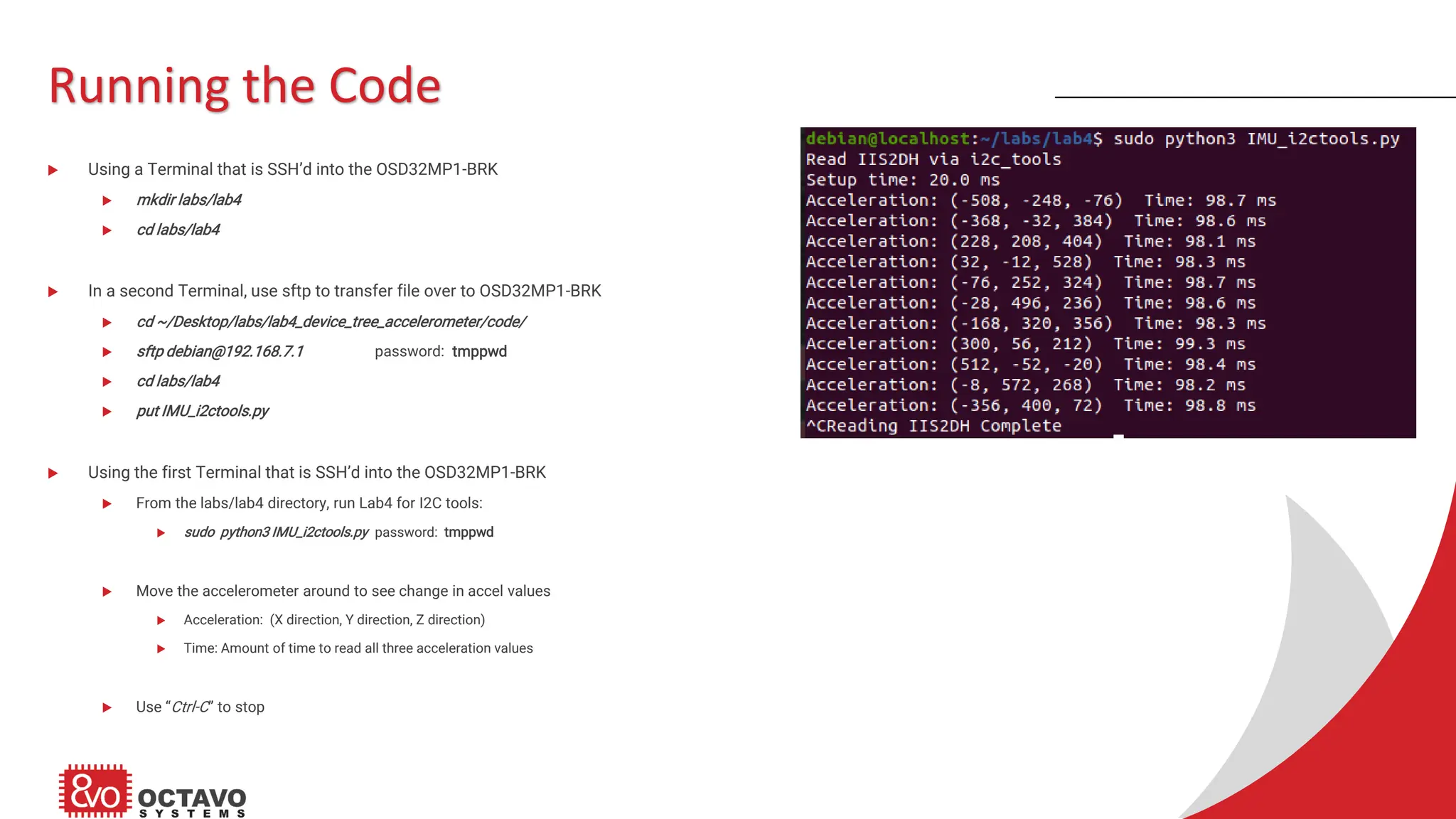
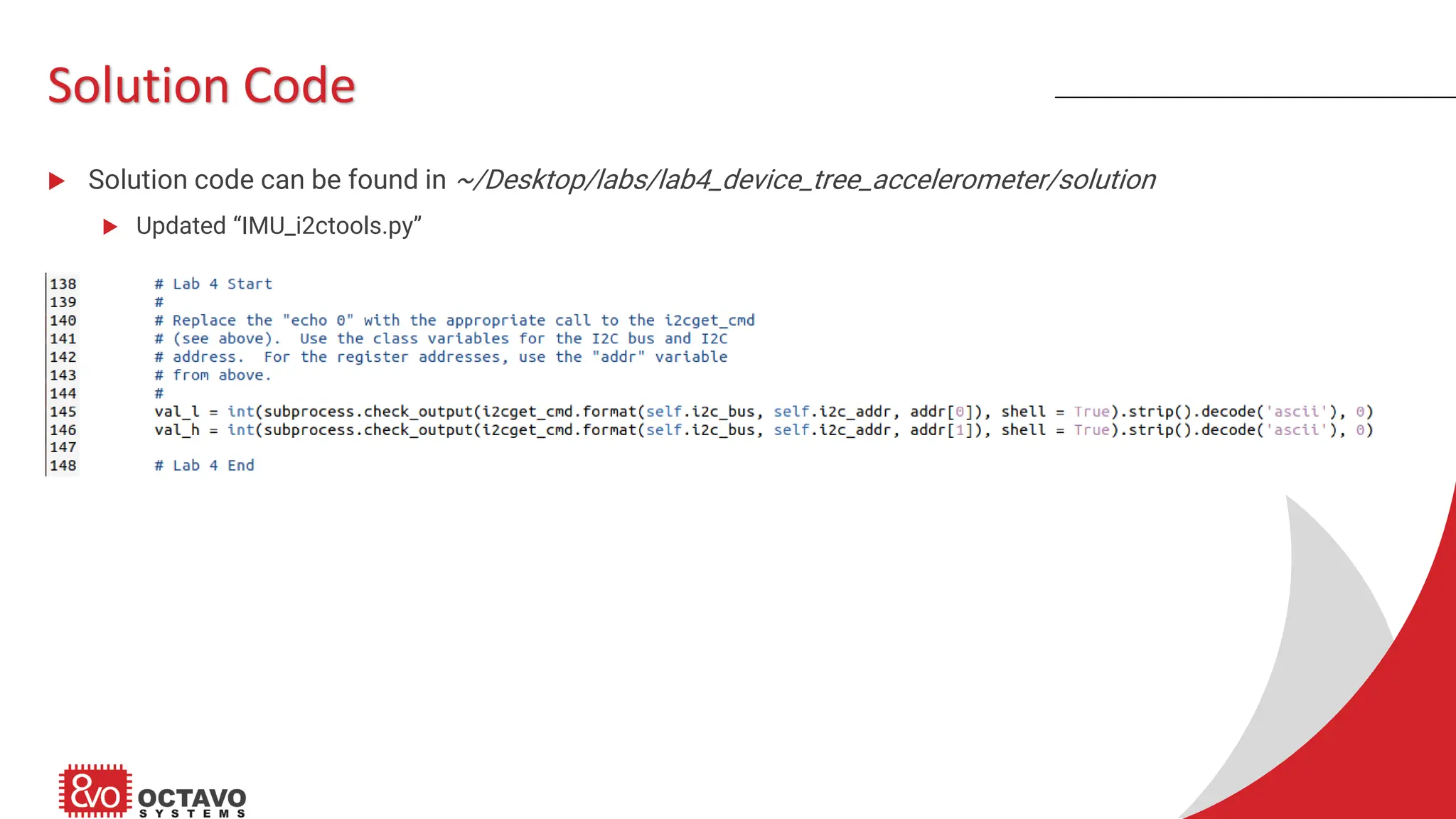
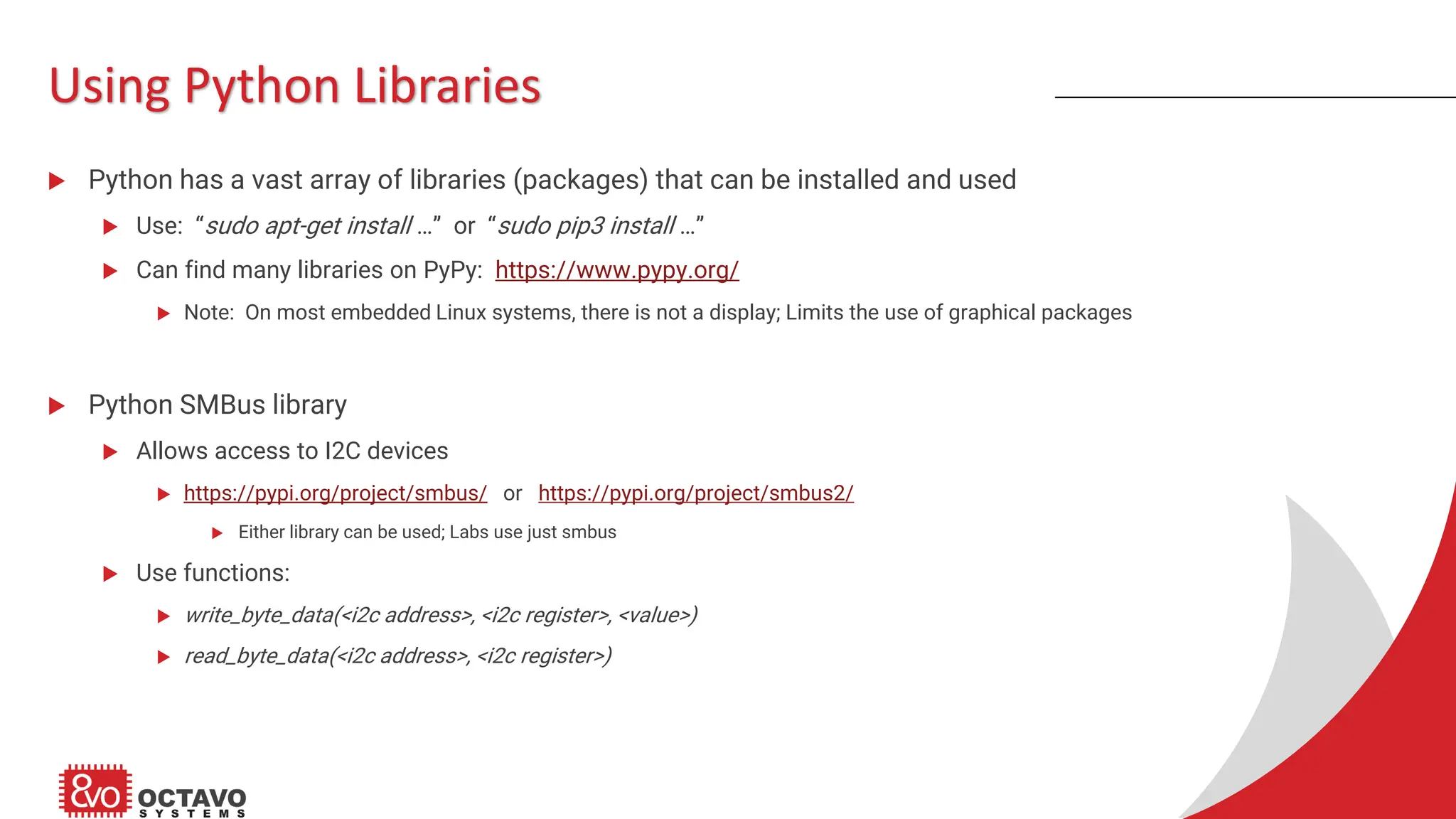
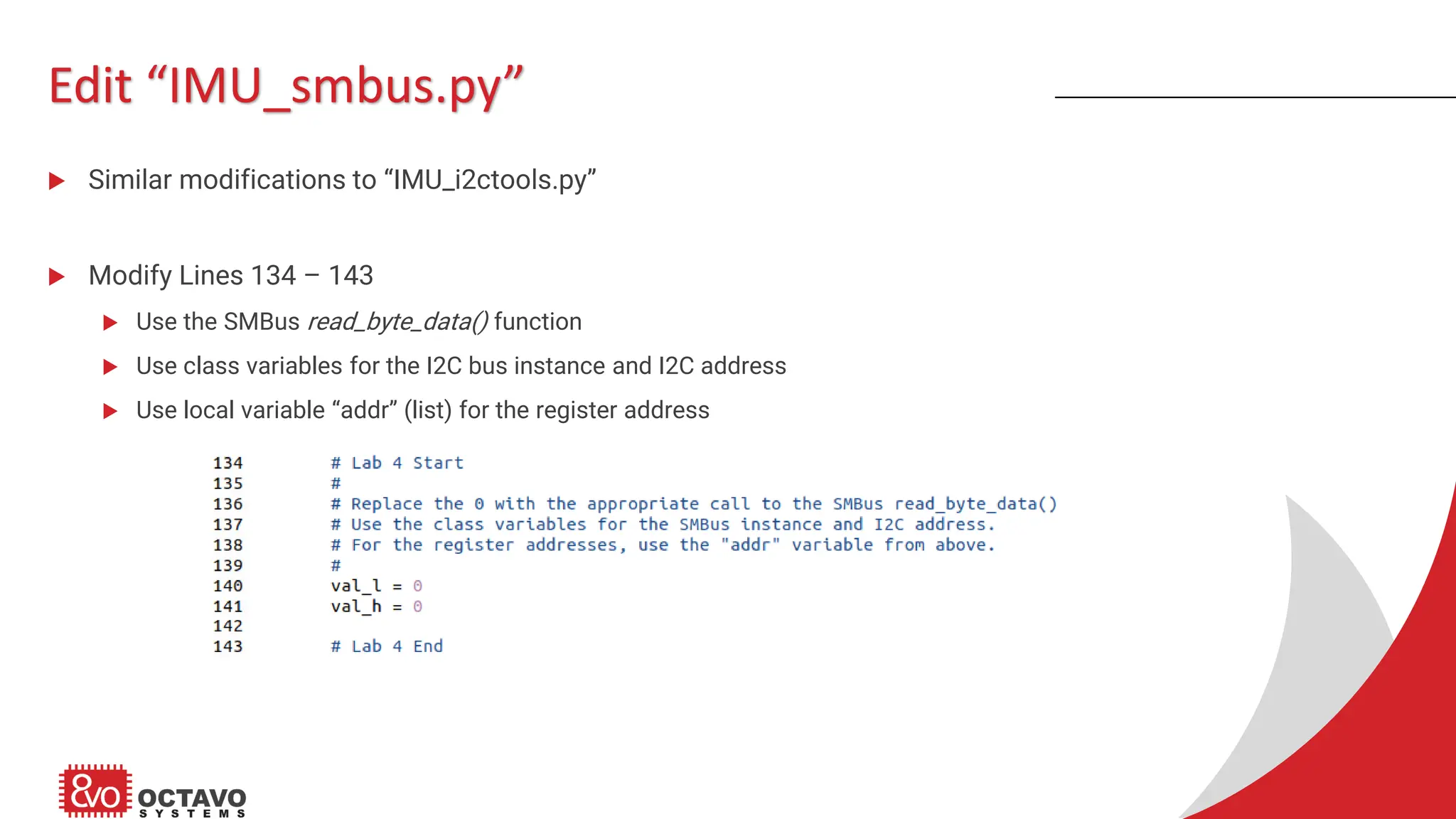
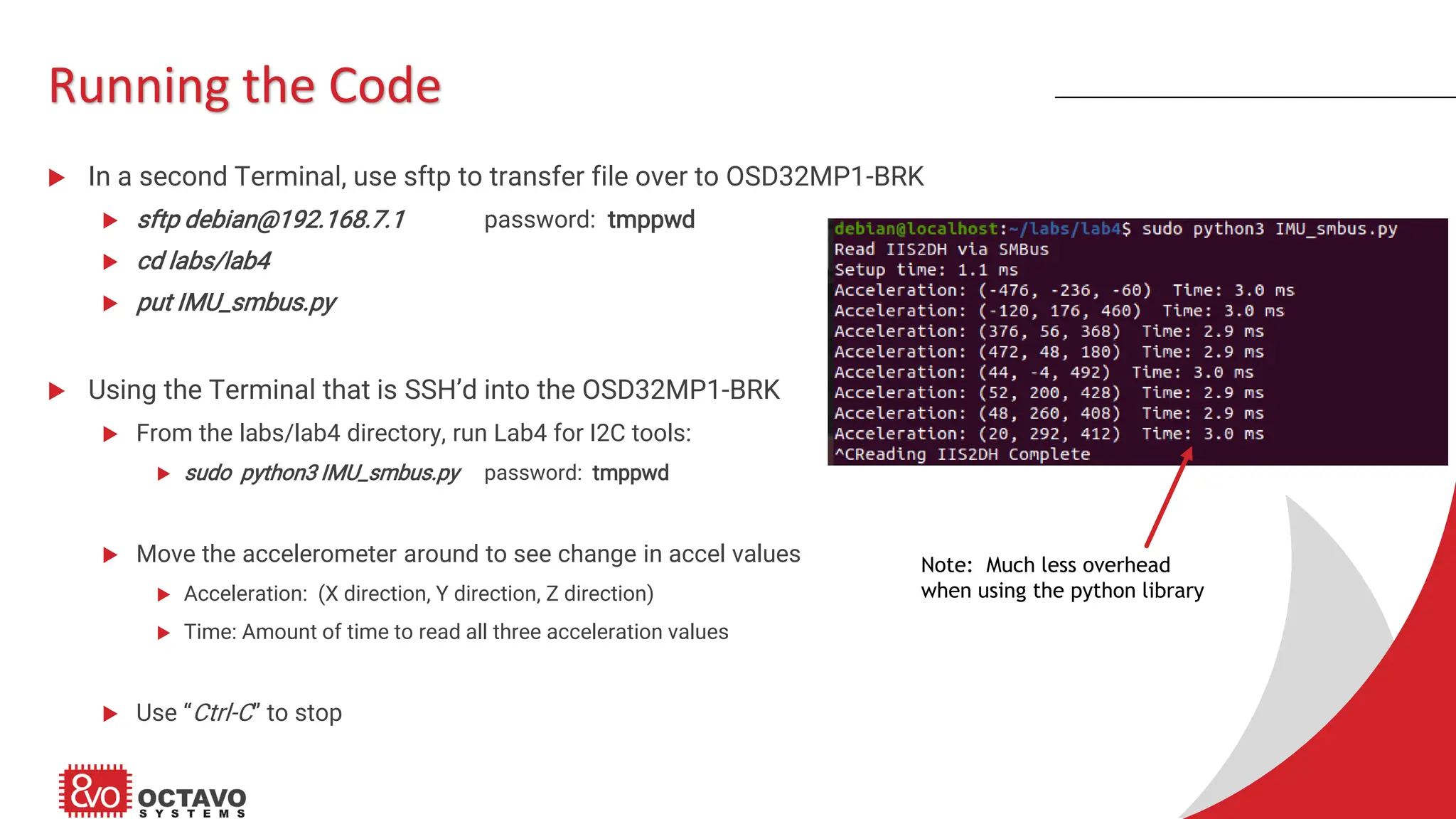
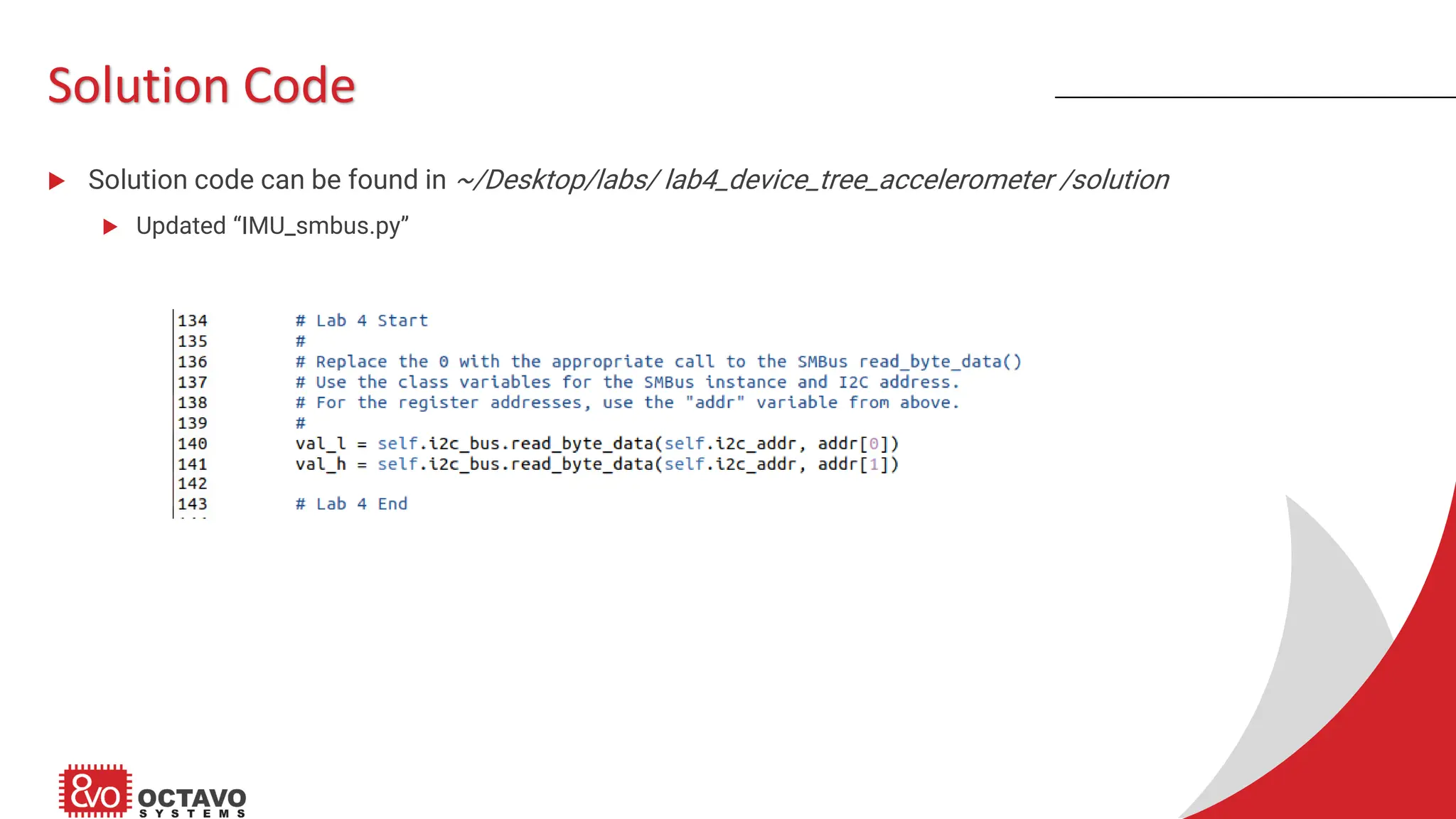
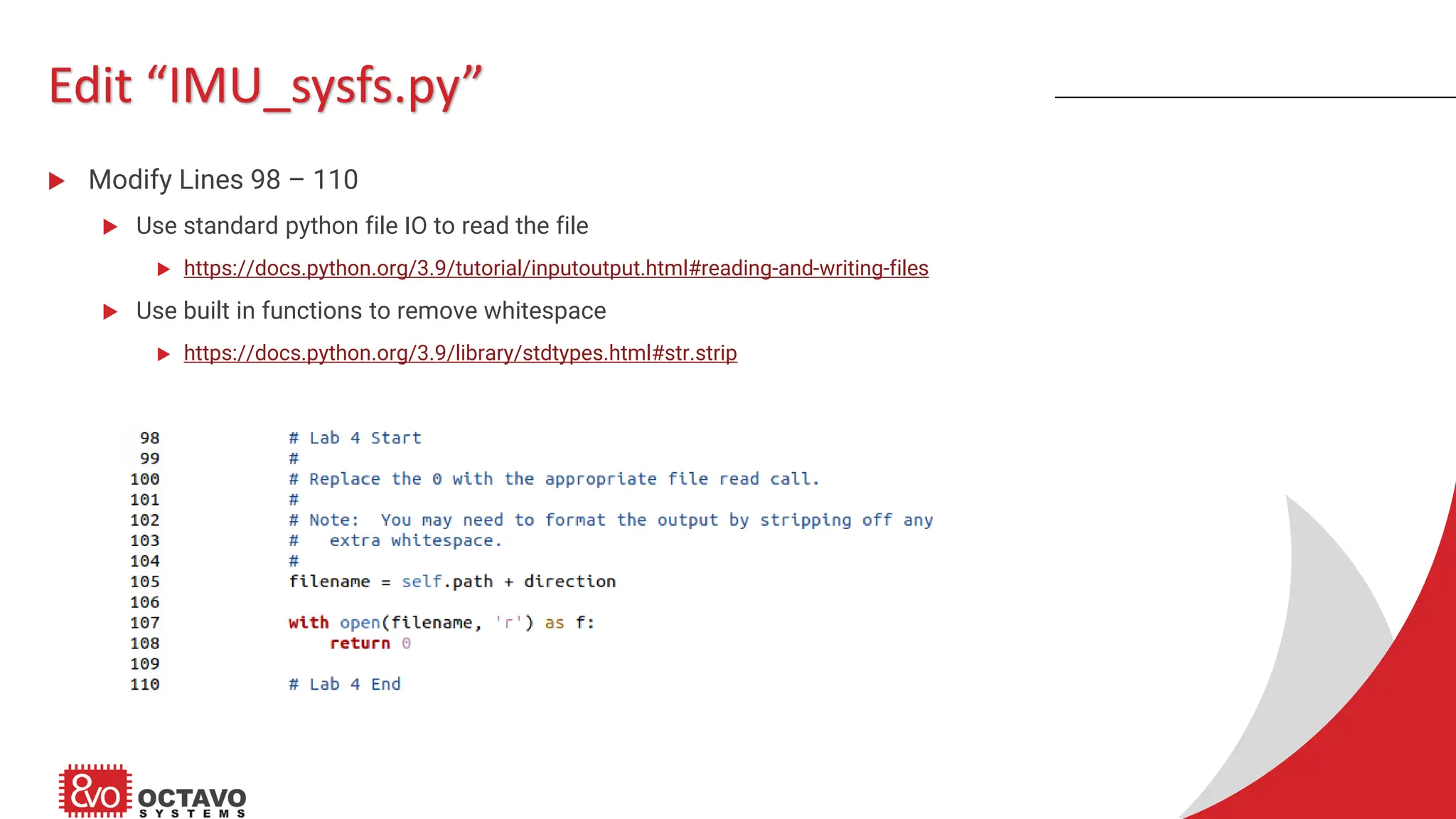
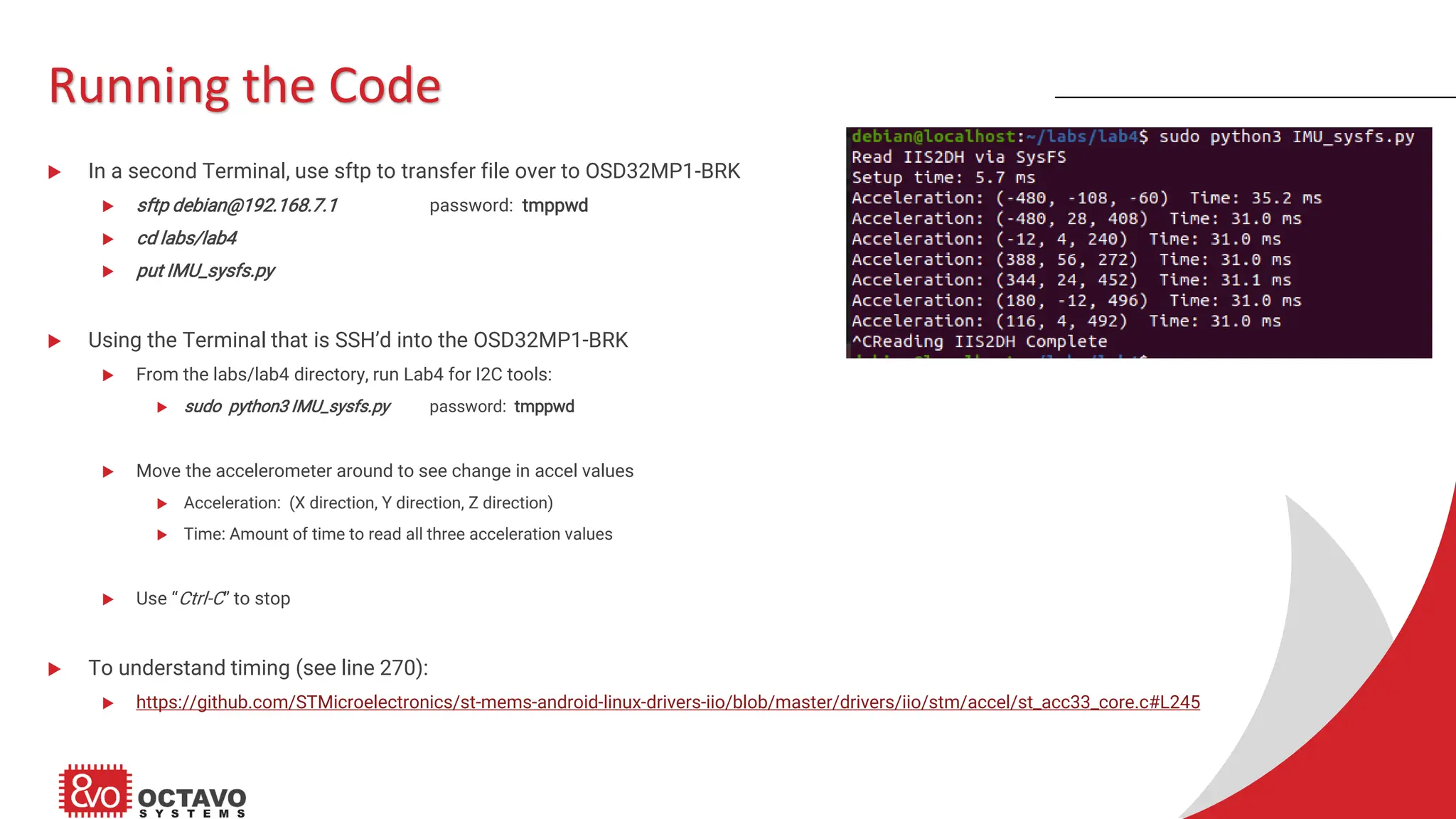
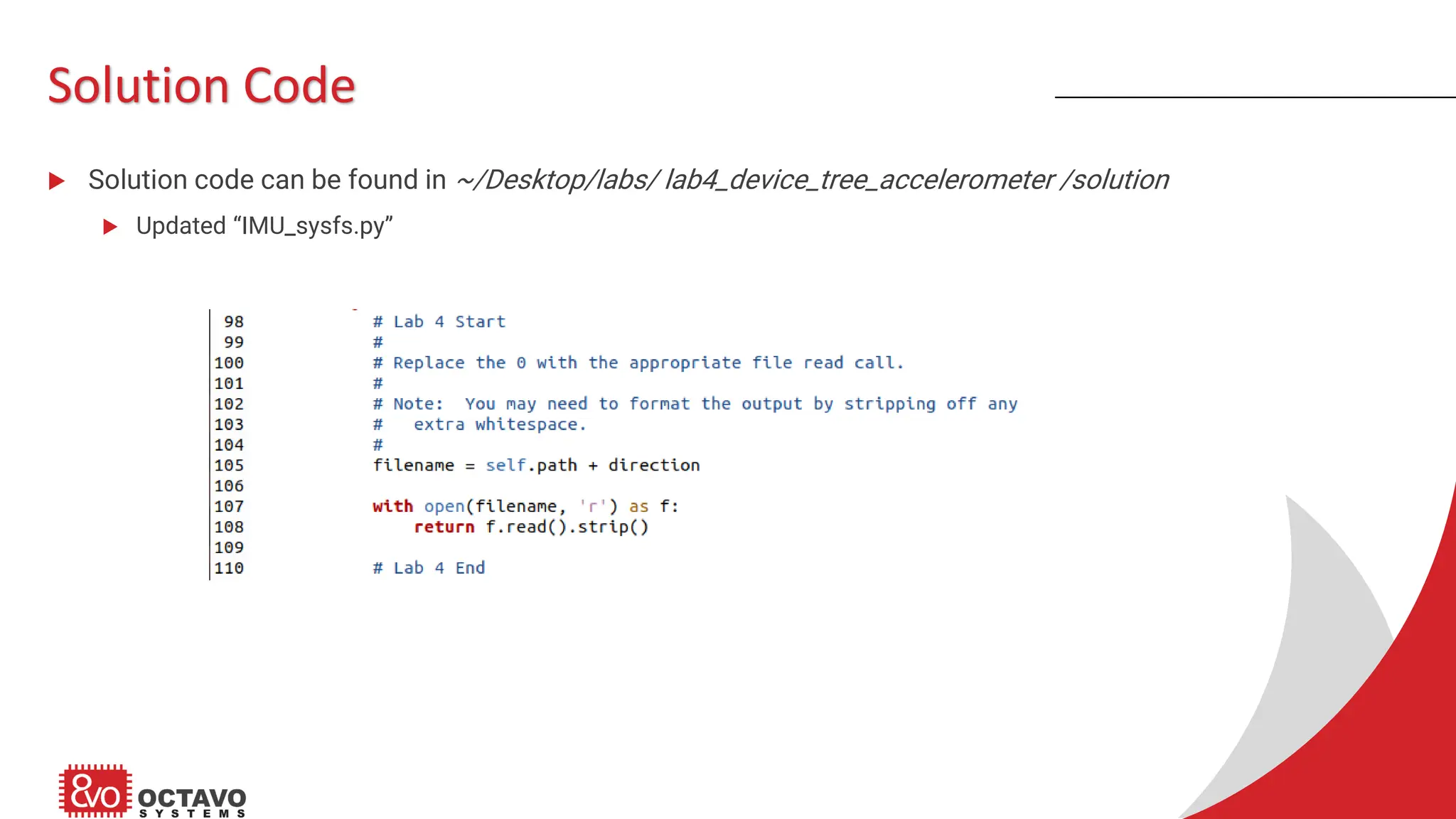
The document provides a comprehensive guide for connecting an I2C sensor, specifically an accelerometer, to the OSD32MP1-BRK development board using various methods including command line tools and Python libraries. It outlines necessary hardware, step-by-step tasks for setup, and code modifications for successful interaction with the sensor through I2C communication. Additionally, it includes instructions for updating the Linux device tree to recognize the added sensor, with example Python scripts for data retrieval and interaction.