Downloaded 125 times

This document describes a servo motor controlled robotic claw. It explains that servomotors allow for precise control of position, velocity, and acceleration through a closed-loop control system. Servomotors are used in robotics and automated manufacturing. The robotic arm uses servomotors at each joint to replicate the movement of a human arm, and it can be controlled through a computer interface to perform tasks like gripping and rotating parts. Arduino and pulse width modulation are used to control the servomotors. Examples of applications include robotic arms in automotive assembly lines and medical robotic arms for surgeries.
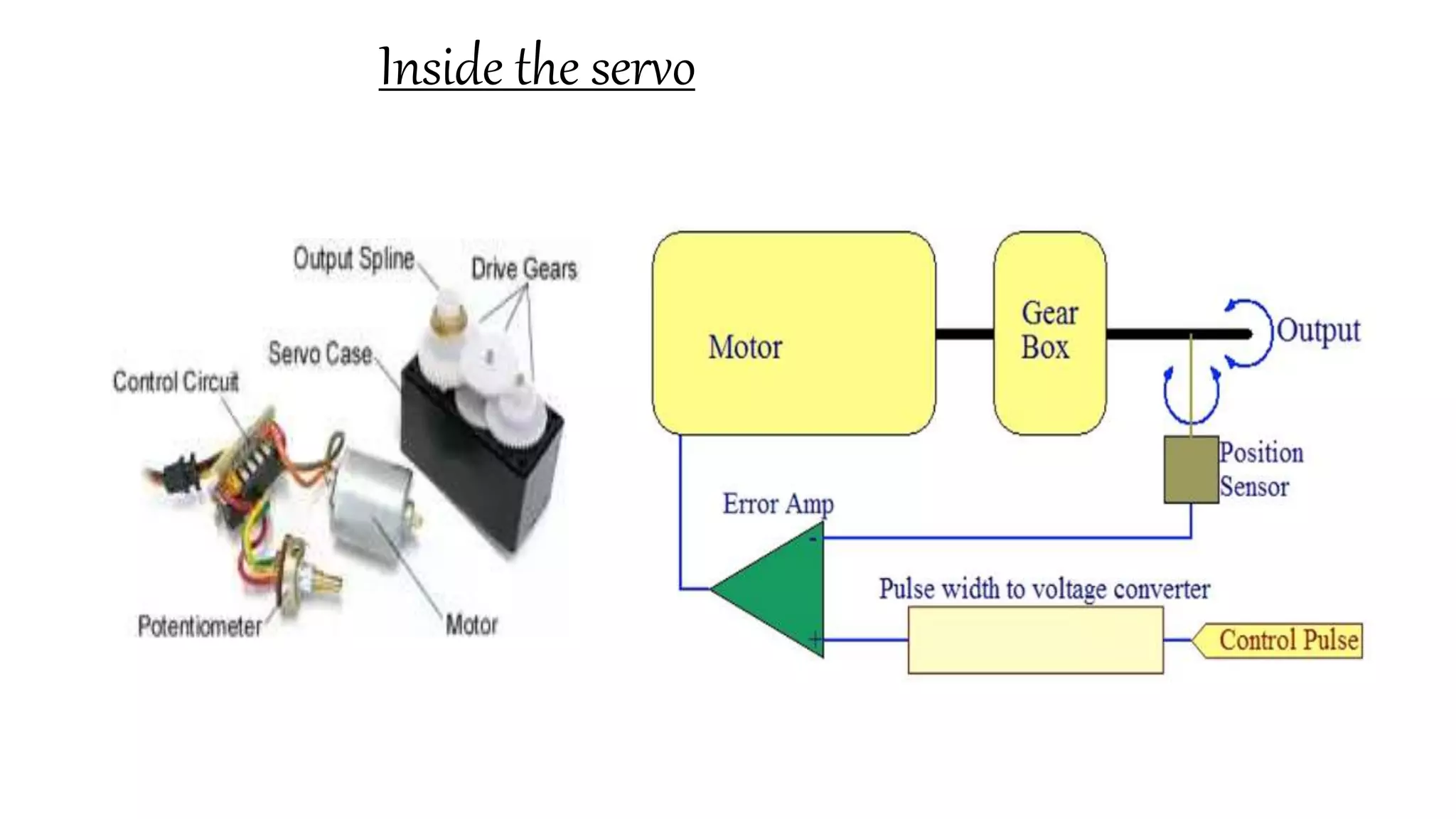
Introduction to servomotors, their functions, and applications in robotics, CNC, and automation.
Overview of robotic arms, their structure, and functionality mimicking human arm movements.
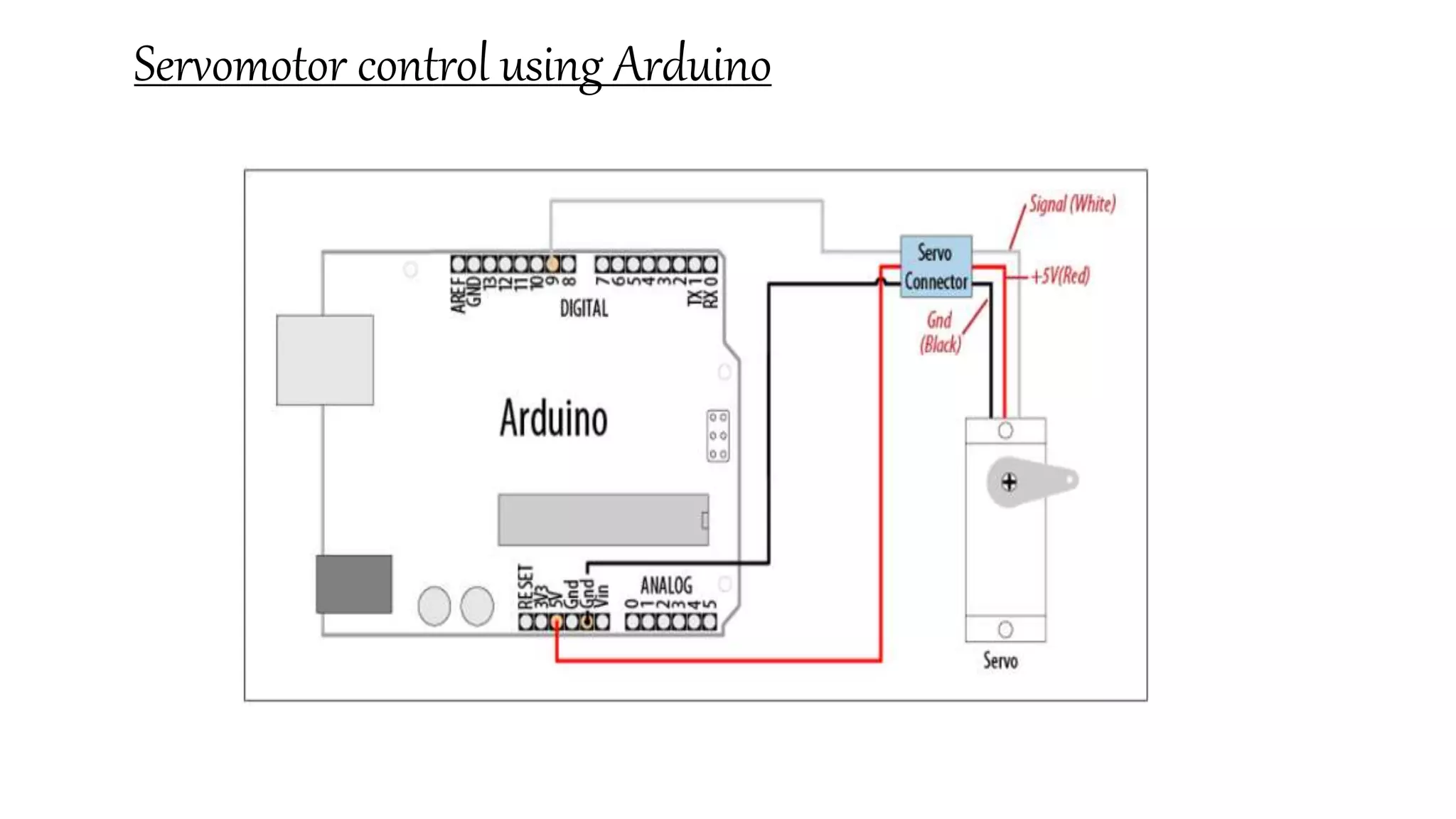
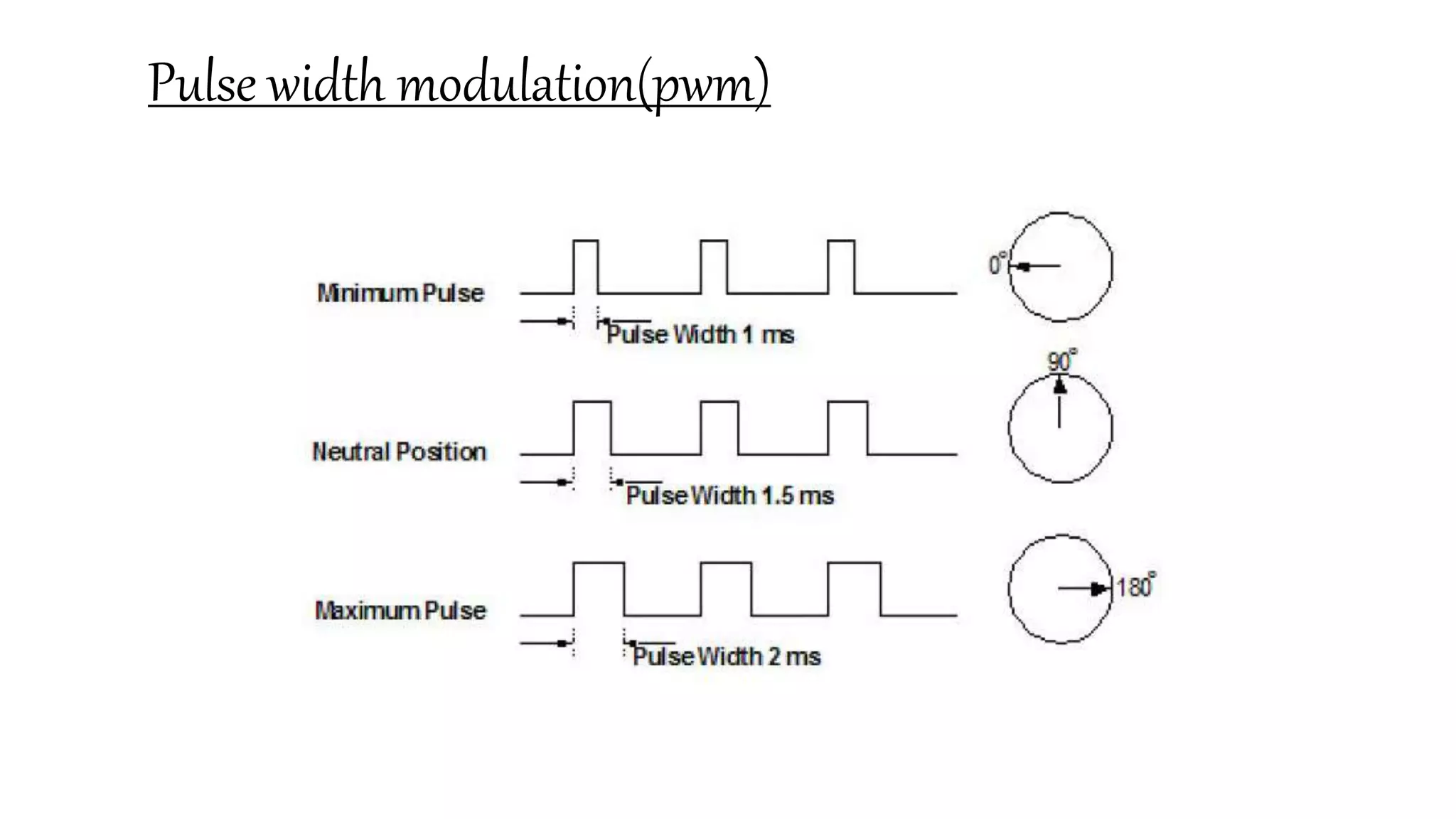
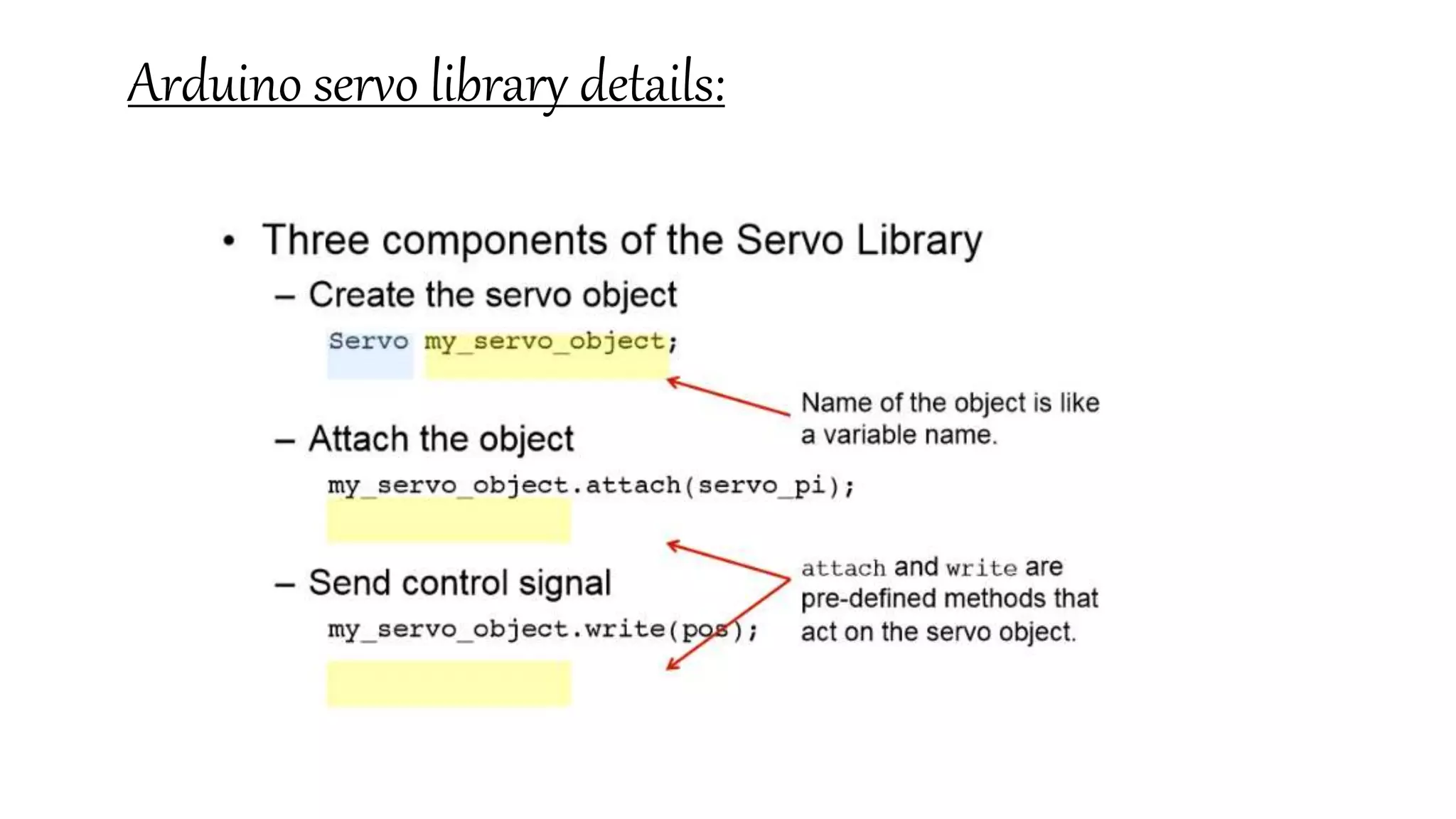
Details on controlling servomotors using Arduino and pulse width modulation (PWM) techniques.
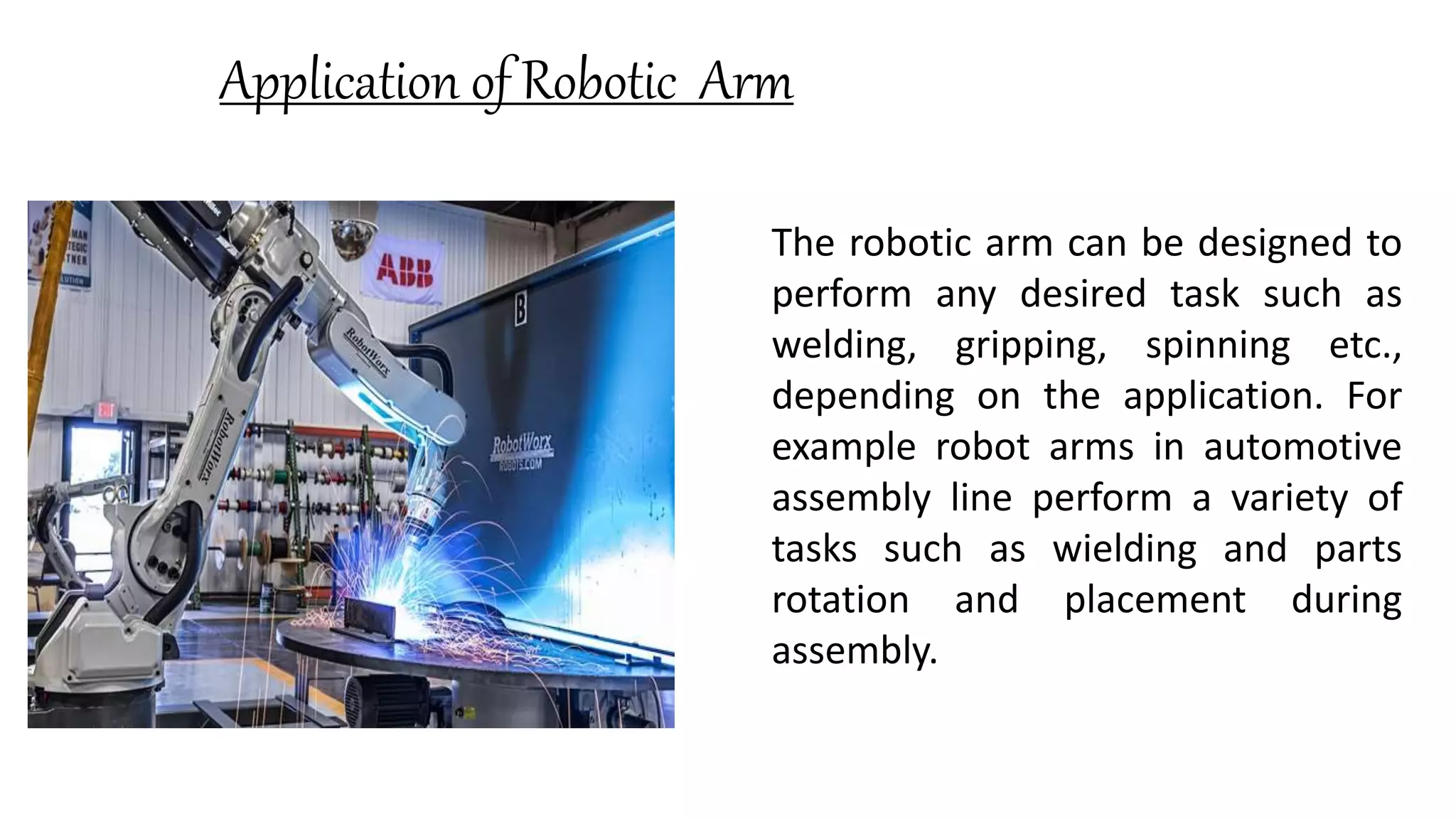
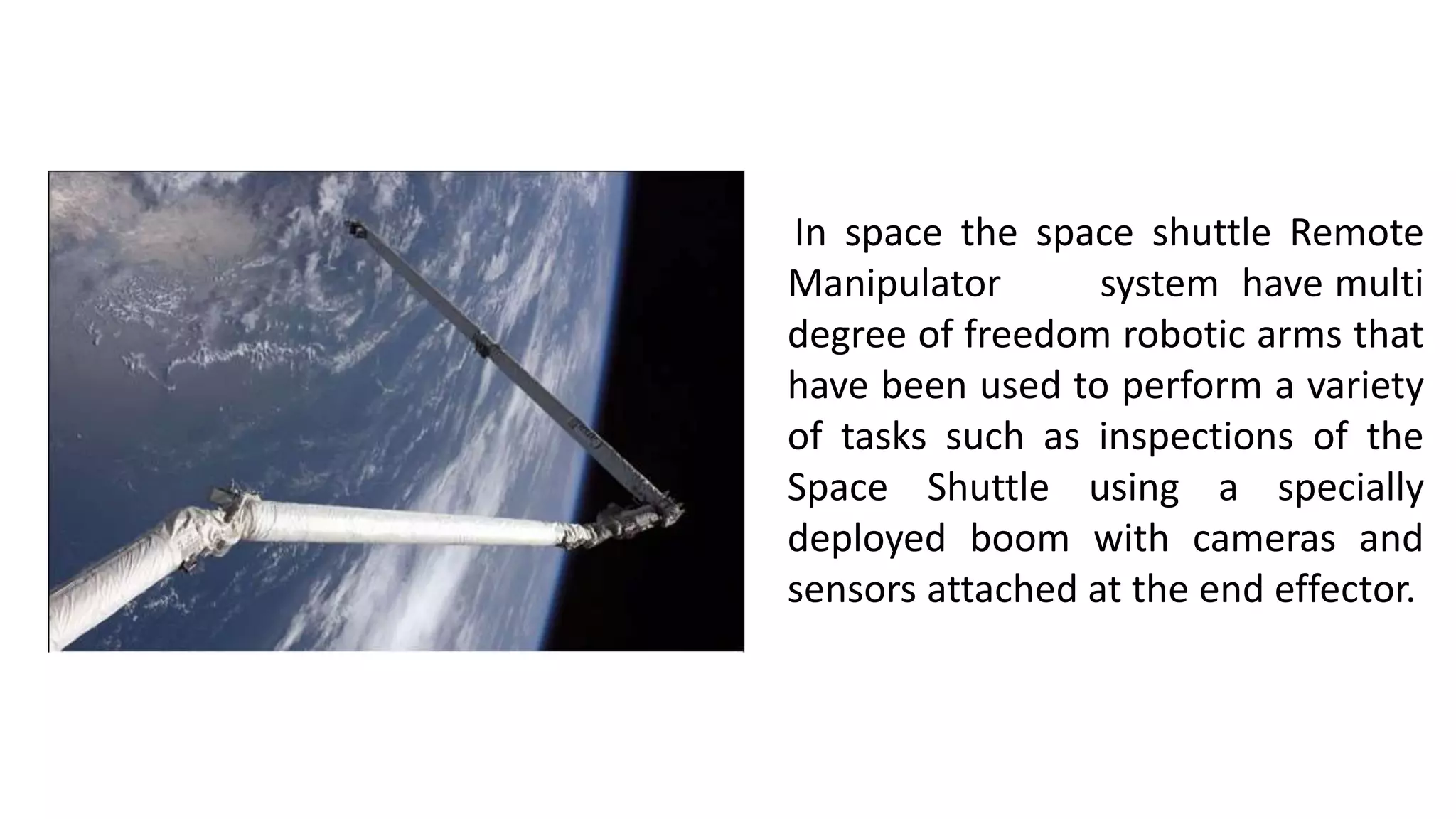
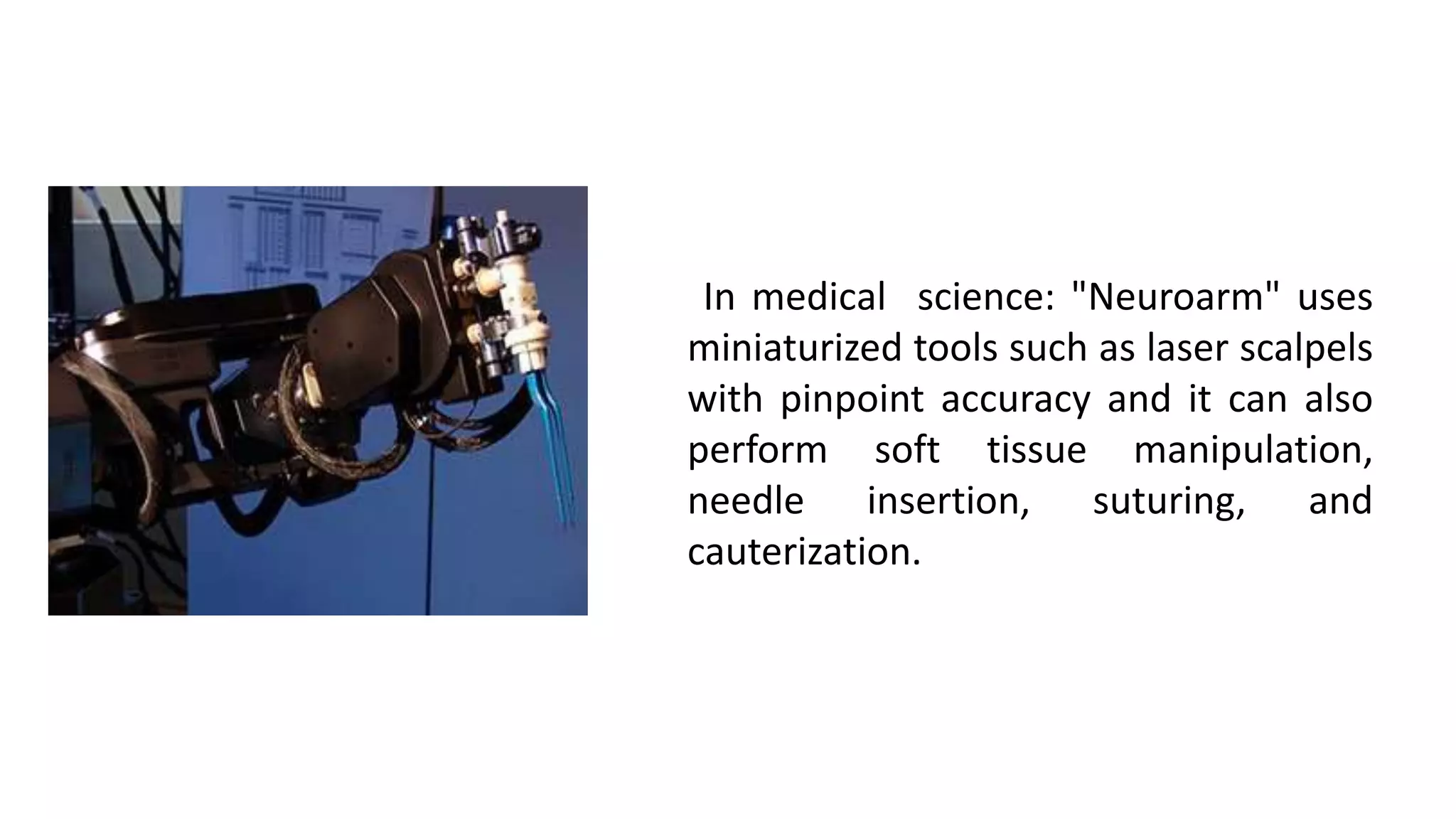
Various applications in automotive, space, and medical fields showcasing robotic arm functionalities.
Links for additional information on Arduino servo libraries and servo specifications.