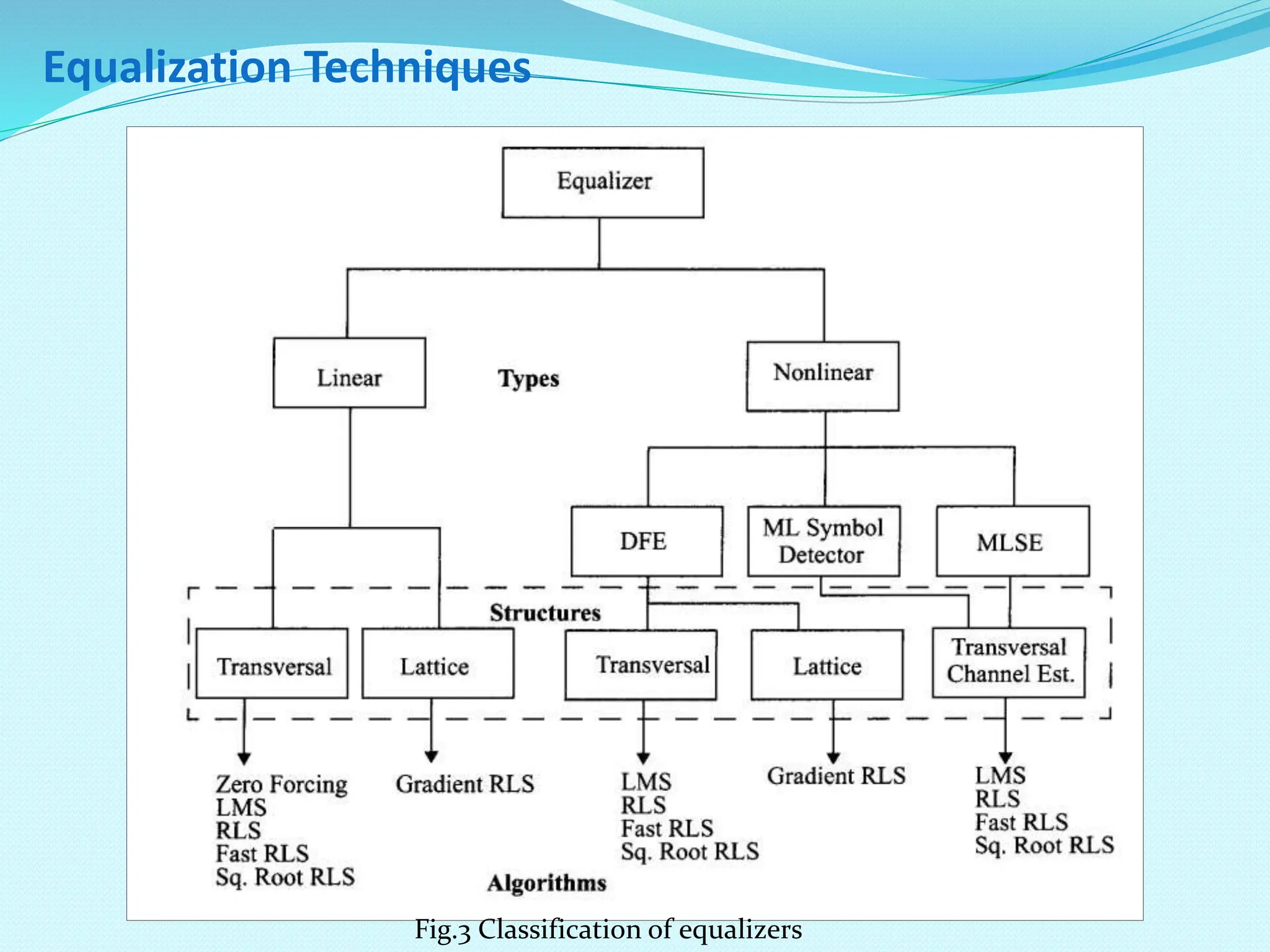
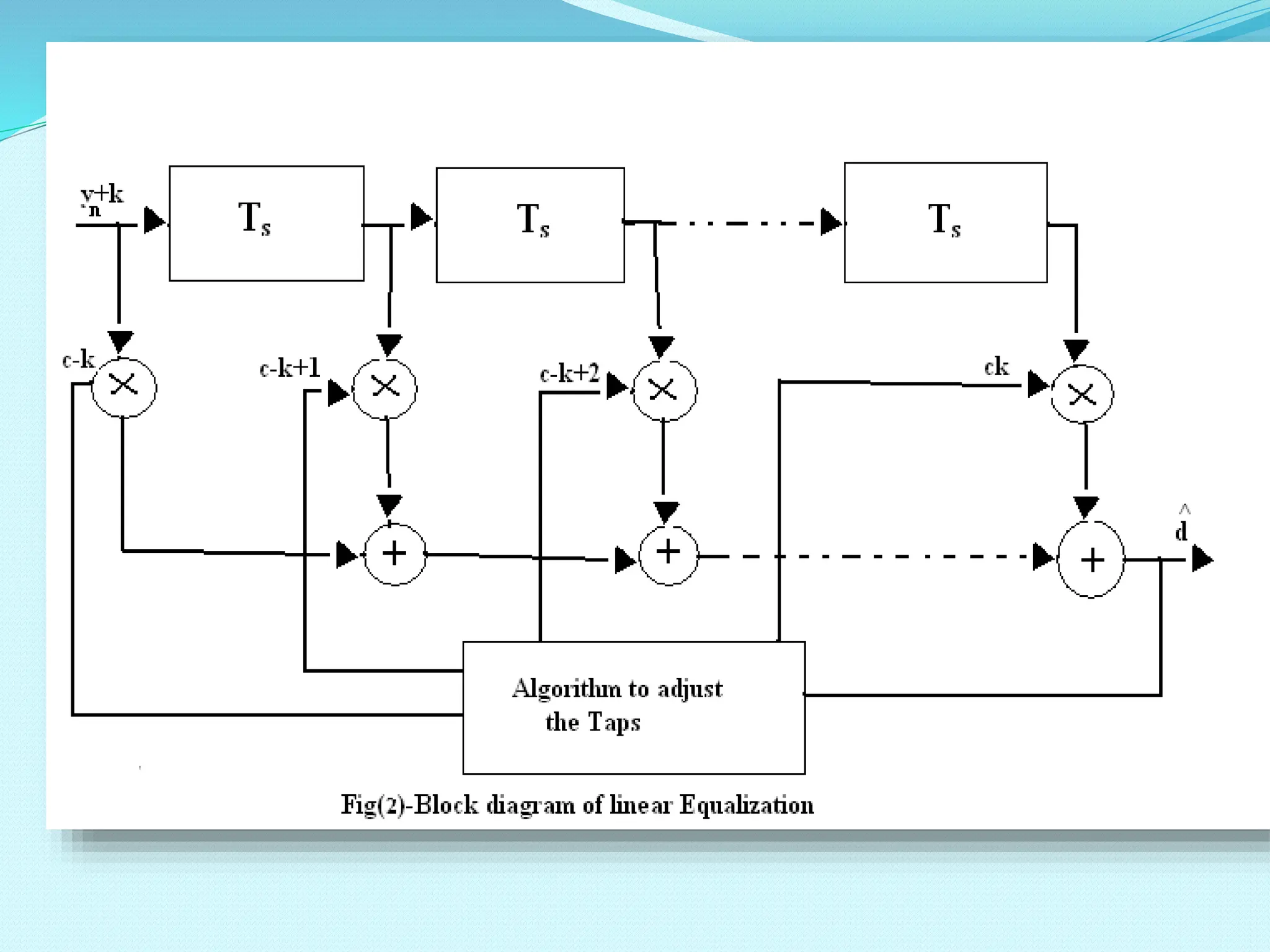
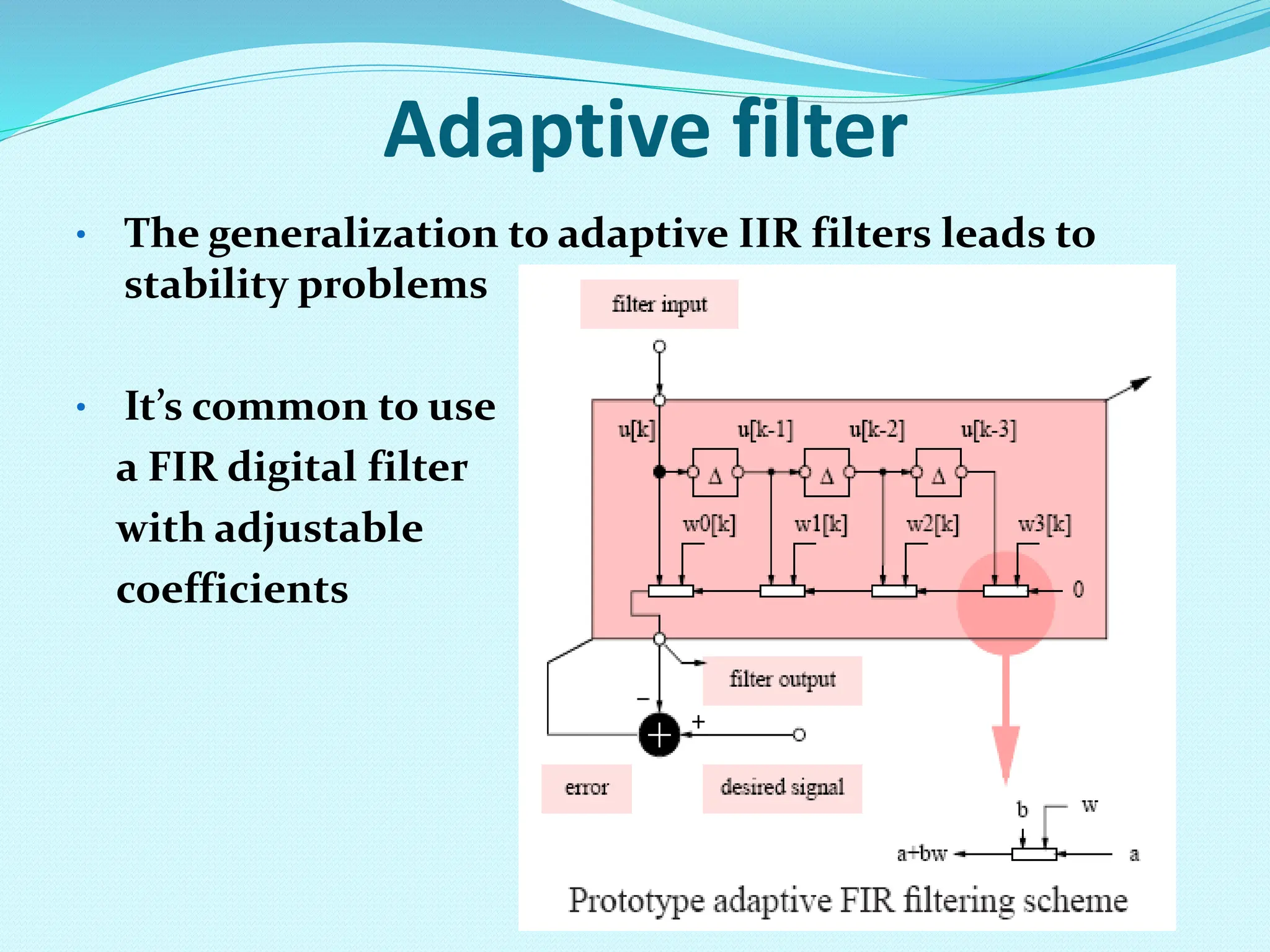
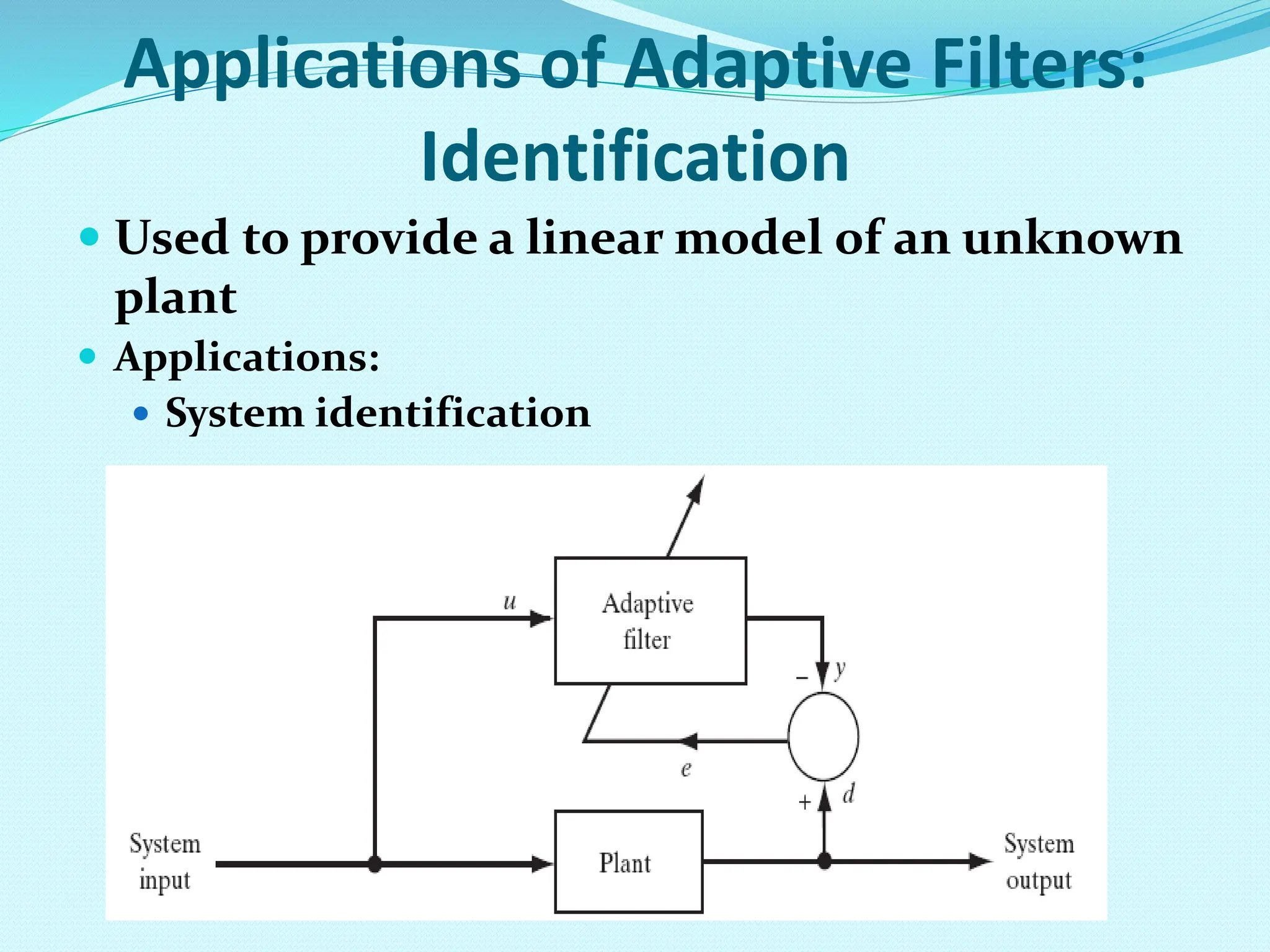
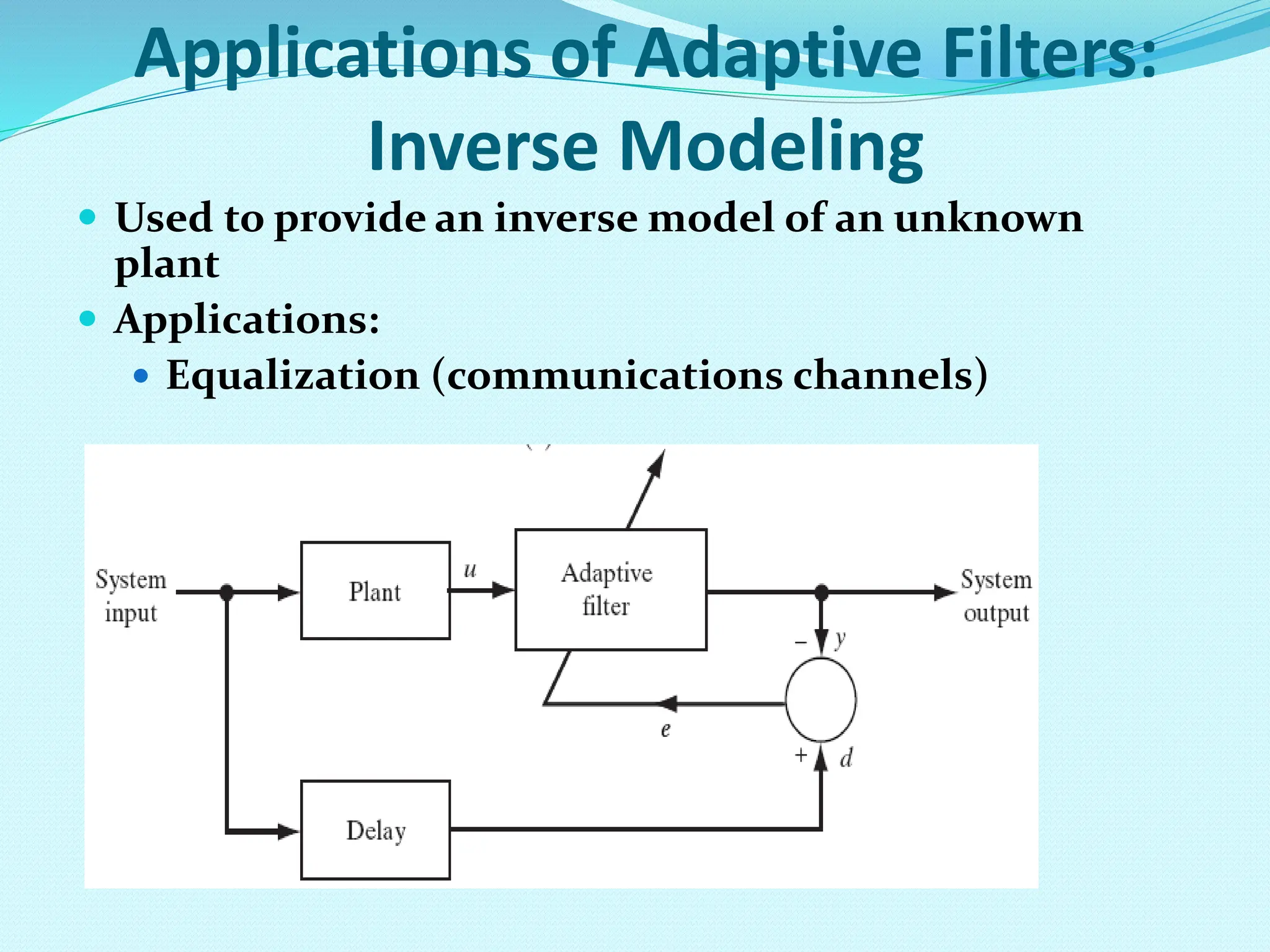
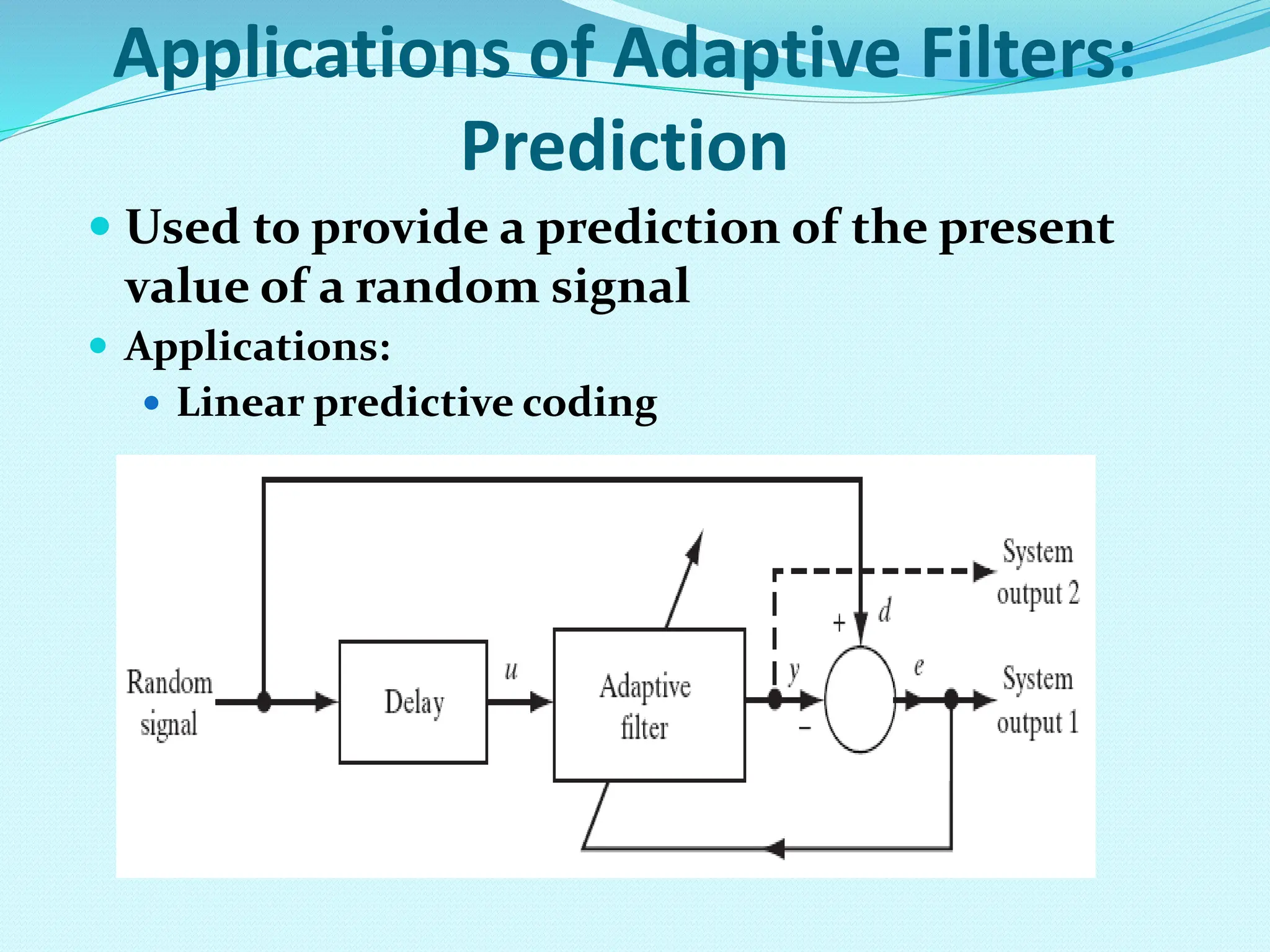
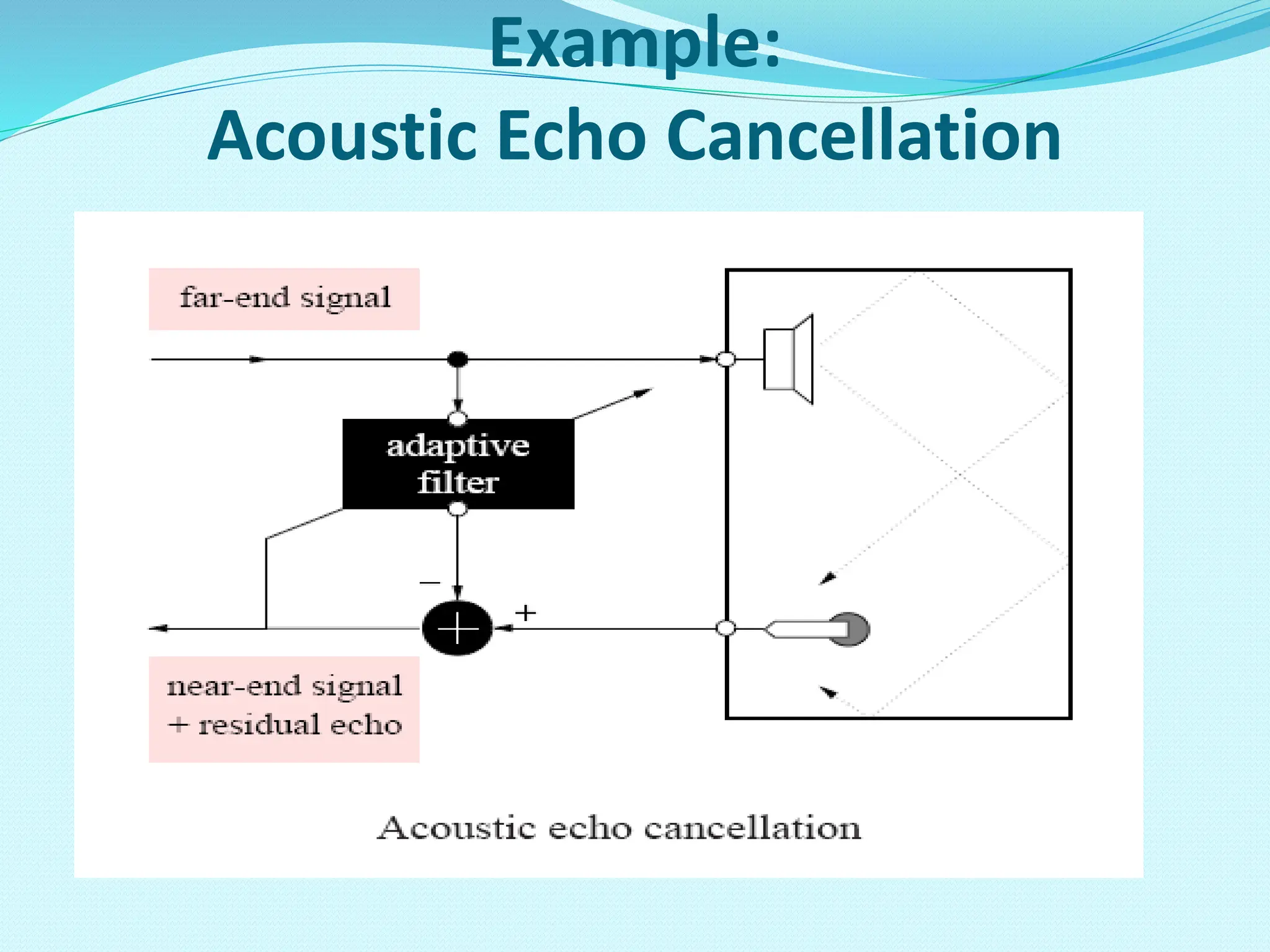
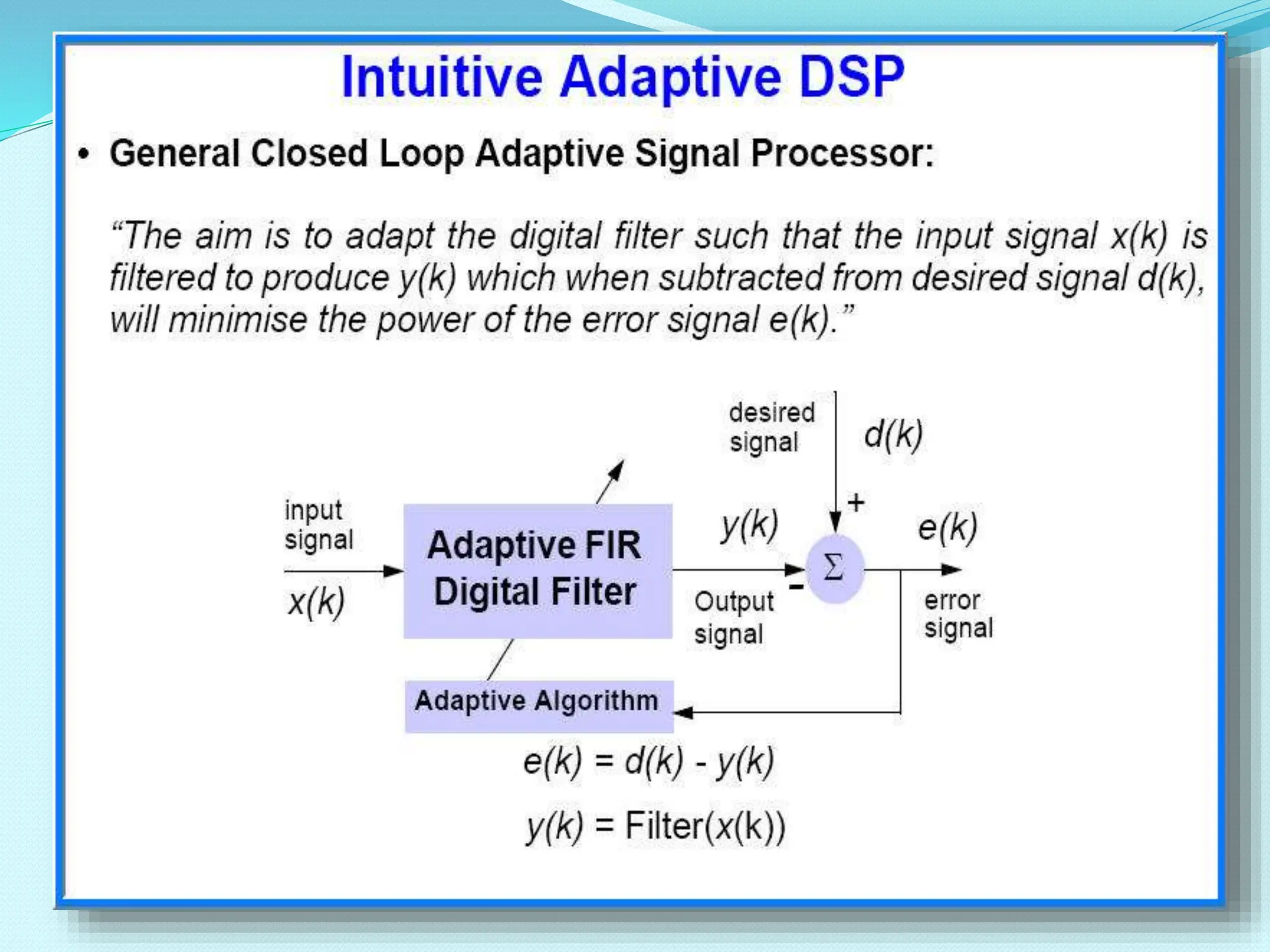
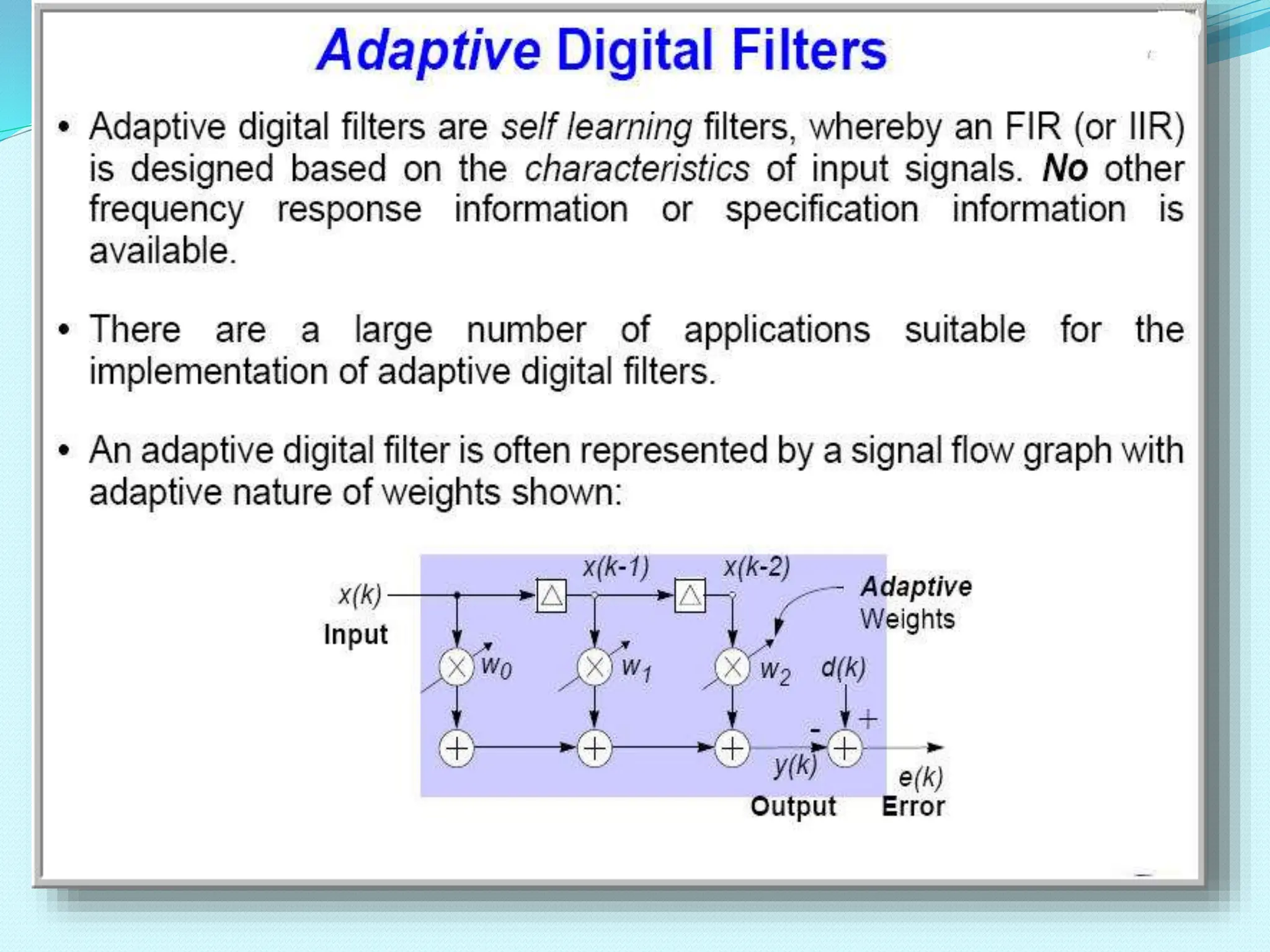
This document discusses linear filters and adaptive filters. It provides an overview of key concepts such as: - Linear filters have outputs that are linear functions of their inputs, while adaptive filters can adjust their parameters over time based on the input signals. - The Wiener filter and LMS algorithm are introduced as approaches for optimal and adaptive filter design, with the LMS algorithm minimizing the mean square error using gradient descent. - Applications of adaptive filters include system identification, inverse modeling, prediction, and interference cancellation. An example of acoustic echo cancellation is described. - The document outlines the LMS adaptive algorithm steps and discusses its stability and convergence properties. It also summarizes different equalization techniques for mitigating inter

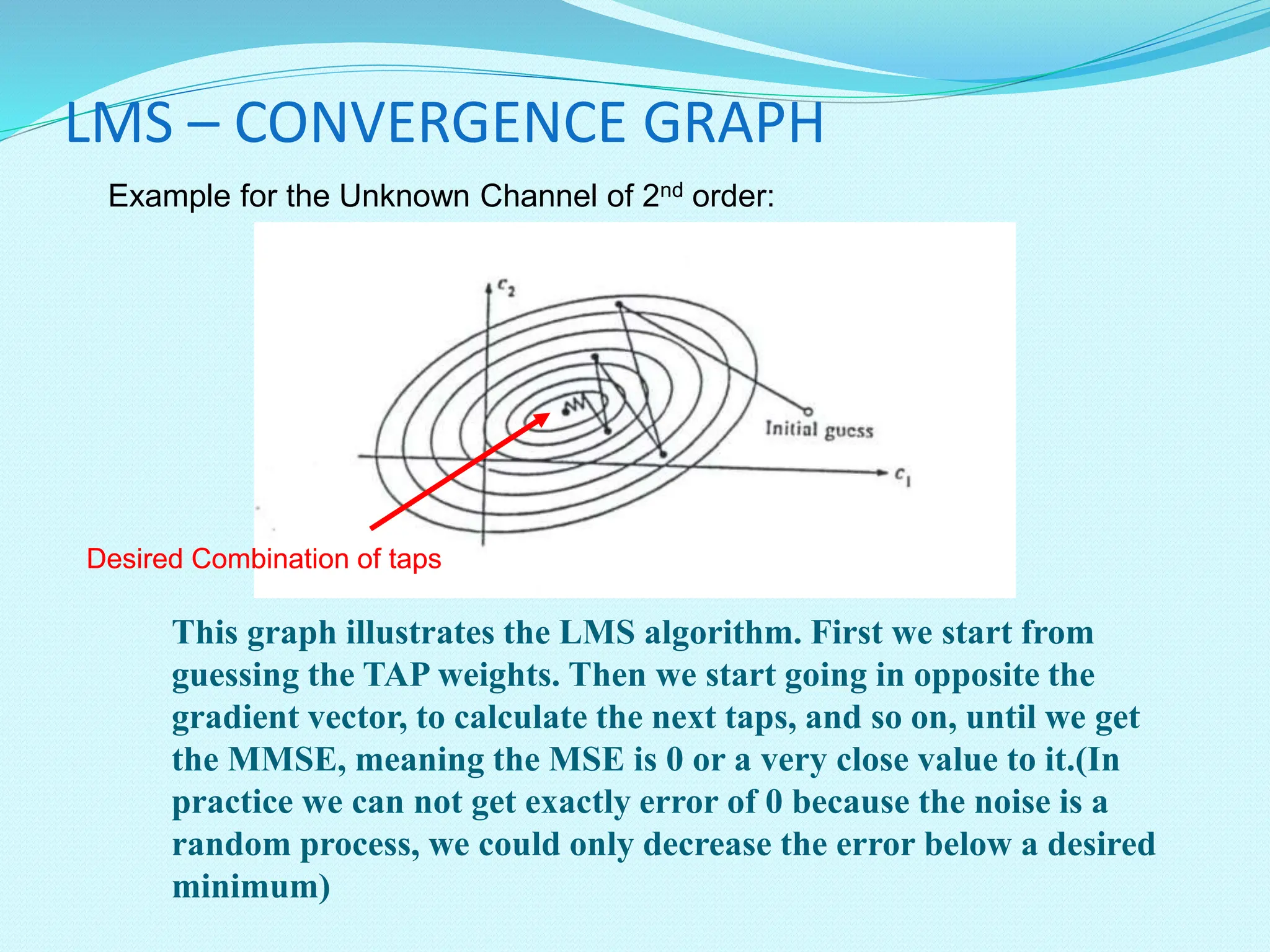
![• We start by assuming (C1 = 5, C2 = 7) • We select the constant . If it is too big, we miss the minimum. If it is too small, it would take us a lot of time to het the minimum. I would select = 0.1. • The gradient vector is: STEEPEST DESCENT EXAMPLE ] [ 2 1 ] [ 2 1 ] [ 2 1 ] [ 2 1 ] 1 [ 2 1 9 . 0 1 . 0 2 . 0 n n n n n C C C C C C y C C C C 2 1 2 1 2 2 C C dc dy dc dy y • So our iterative equation is:](https://image.slidesharecdn.com/th-240123153739-85ee0024/75/Introduction-to-adaptive-filtering-and-its-applications-ppt-20-2048.jpg)
![STEEPEST DESCENT EXAMPLE 567 . 0 405 . 0 : 3 3 . 6 5 . 4 : 2 7 5 : 1 2 1 2 1 2 1 C C Iteration C C Iteration C C Iteration 0 0 lim 013 . 0 01 . 0 : 60 ...... ] [ 2 1 2 1 n n C C C C Iteration As we can see, the vector [c1,c2] converges to the value which would yield the function minimum and the speed of this convergence depends on . 1 C 2 C y Initial guess Minimum](https://image.slidesharecdn.com/th-240123153739-85ee0024/75/Introduction-to-adaptive-filtering-and-its-applications-ppt-21-2048.jpg)