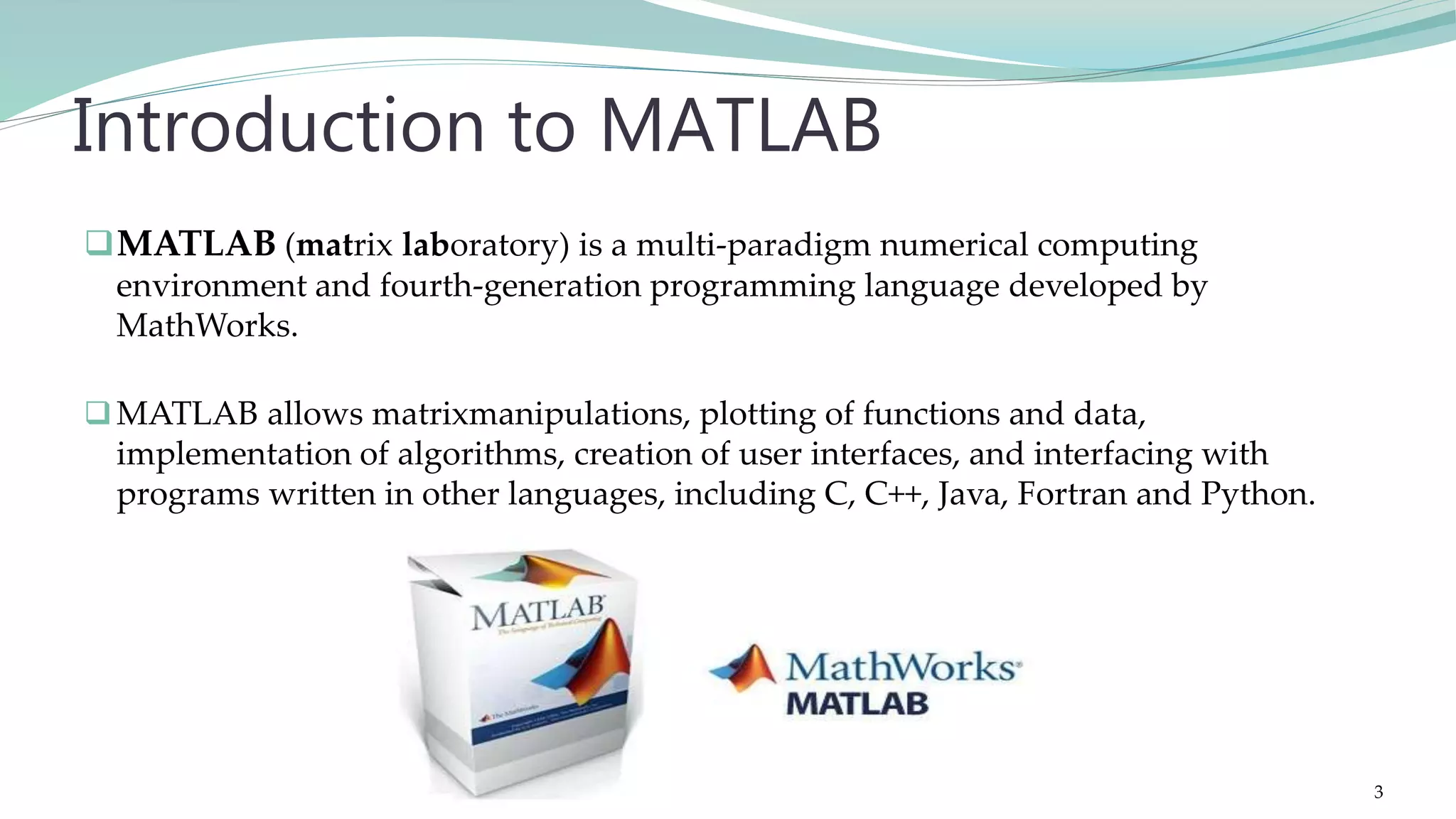
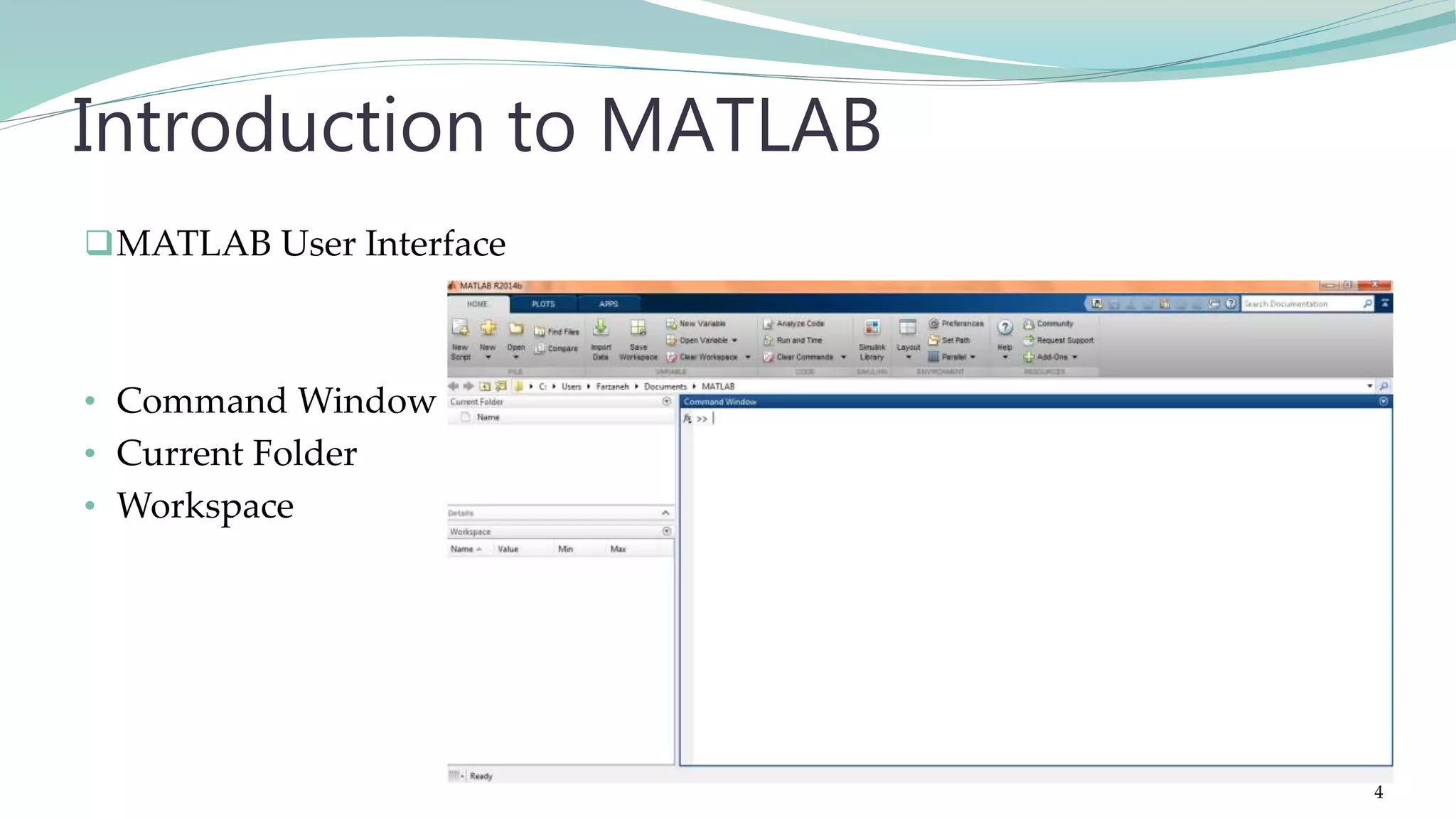
The document provides a comprehensive introduction to MATLAB including its user interface and basic functionalities such as matrix manipulations, plotting, and algorithm implementation. It covers various topics such as image processing and computer vision, explaining the use of MATLAB toolboxes for image analysis, enhancement, and segmentation techniques. Additionally, it discusses advanced topics like calculus, functions, and filtering processes in image processing, along with practical examples and code snippets.
![>> m(3) ans = 3 >> length(m) ans = 5 >> sum(m) ans = 15 Introduction to MATLAB >> m=[1 2 3 4 5] m = 1 2 3 4 5 >> m' ans = 1 2 3 4 5 >> min(m) ans = 1 >> max(m) ans = 5 >> mean(m) ans = 3 Vectors 13](https://image.slidesharecdn.com/imageprocessingcomputervisionwithmatlab-170402164022/75/Fundamentals-of-Image-Processing-Computer-Vision-with-MATLAB-13-2048.jpg)
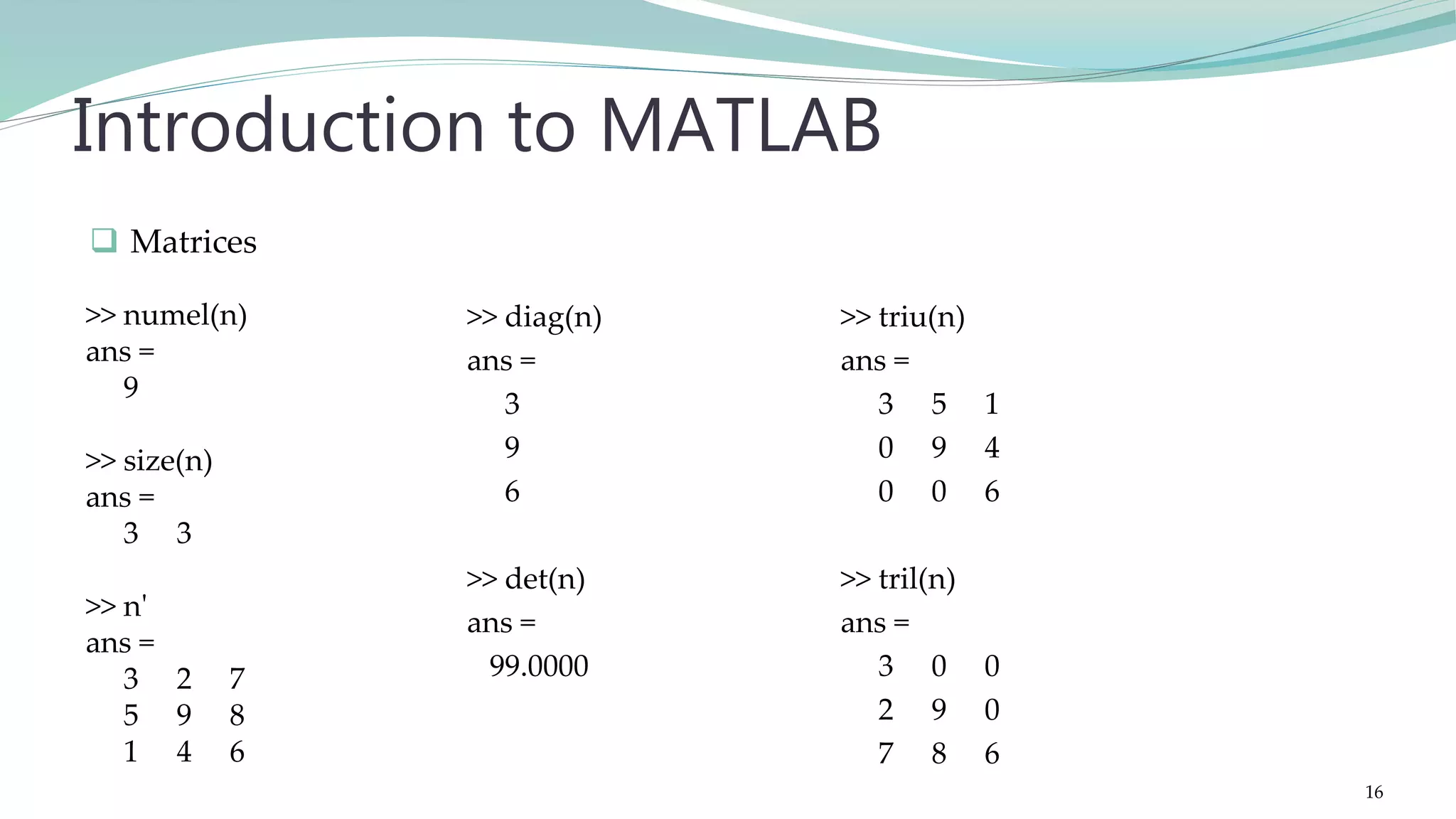
![>> n(2,3) ans = 4 >> n(3,:) ans = 7 8 6 >> max(n) ans = 7 9 6 Introduction to MATLAB >> min(n) ans = 2 5 1 >> sum(n) ans = 12 22 11 >> sum(sum(n)) ans = 45 Matrices >> n=[3 5 1;2 9 4;7 8 6] n = 3 5 1 2 9 4 7 8 6 >> n(1:3,2:3) ans = 5 1 9 4 8 6 15](https://image.slidesharecdn.com/imageprocessingcomputervisionwithmatlab-170402164022/75/Fundamentals-of-Image-Processing-Computer-Vision-with-MATLAB-15-2048.jpg)
![>> std(data) ans = 26.0109 >> var(data) ans = 676.5667 Introduction to MATLAB Statistics >> data=[12,54,23,69,31,76] data = 12 54 23 69 31 76 >> sort(data) ans = 12 23 31 54 69 76 >> median(ans) ans = 42.5000 18](https://image.slidesharecdn.com/imageprocessingcomputervisionwithmatlab-170402164022/75/Fundamentals-of-Image-Processing-Computer-Vision-with-MATLAB-18-2048.jpg)
![Plotting >> x=[4 6 8 11 12]; >> y=[1 3 3 5 7]; >> plot(x,y) >> bar(y) >> pie(x) Introduction to MATLAB 24](https://image.slidesharecdn.com/imageprocessingcomputervisionwithmatlab-170402164022/75/Fundamentals-of-Image-Processing-Computer-Vision-with-MATLAB-24-2048.jpg)
![input >> a=input('enter value for array: ') enter value for array: [3 4 9 0 2] a = 3 4 9 0 2 Introduction to MATLAB >> name=input('enter your name: ','s') enter your name: Ali name = Ali >> whos Name Size Bytes Class name 1x19 38 char 25](https://image.slidesharecdn.com/imageprocessingcomputervisionwithmatlab-170402164022/75/Fundamentals-of-Image-Processing-Computer-Vision-with-MATLAB-25-2048.jpg)


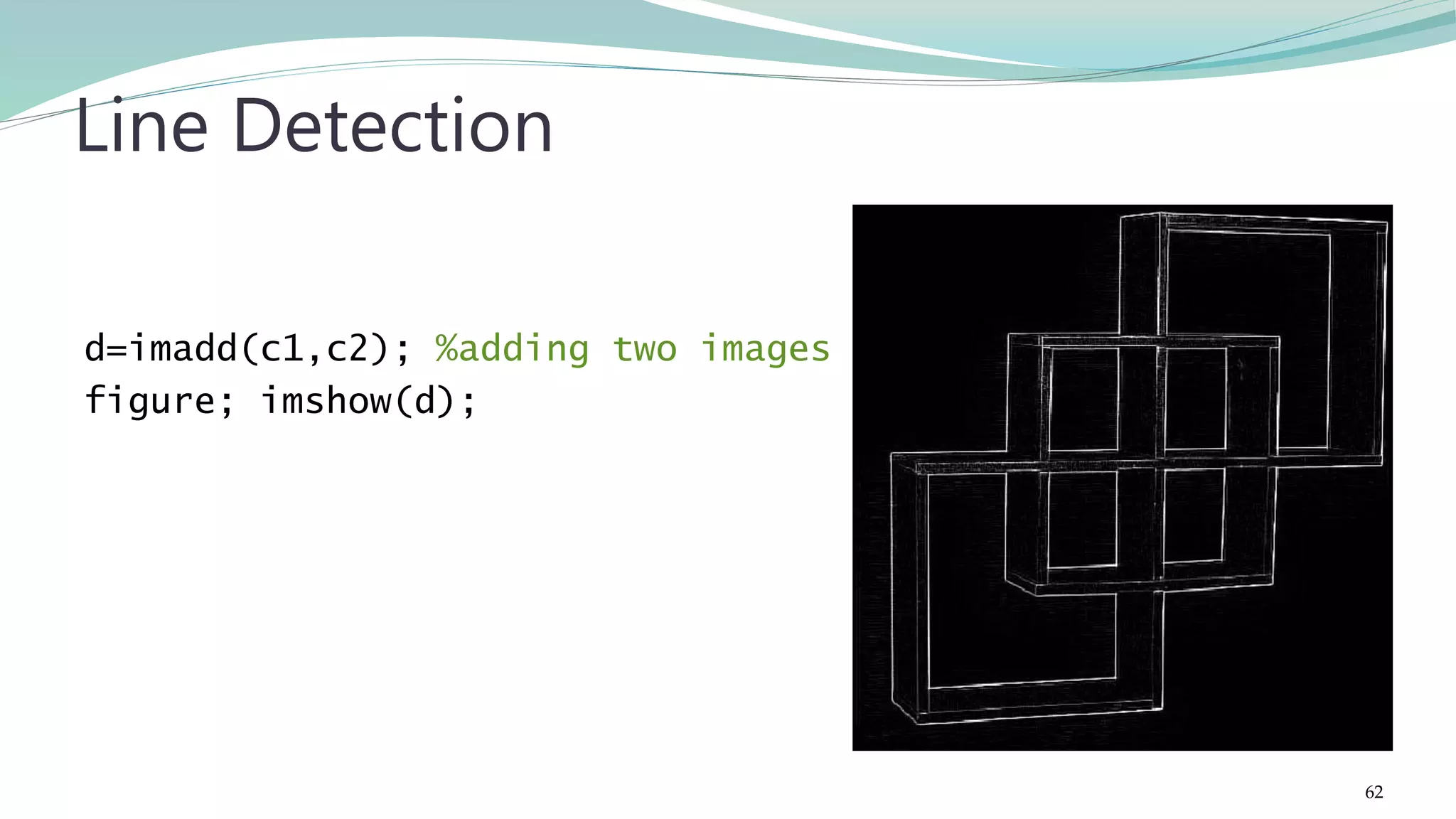
![clc; clear; a=imread('shelf.png'); b=rgb2gray(a); figure; imshow(a); h=[-1 -1 -1;2 2 2; -1 -1 -1]; %filter for horizontal lines c1=imfilter(b,h); figure; imshow(c1); h=[-1 2 -1;-1 2 -1; -1 2 -1]; %filter for vertical lines c2=imfilter(b,h); figure; imshow(c2); Line Detection 60](https://image.slidesharecdn.com/imageprocessingcomputervisionwithmatlab-170402164022/75/Fundamentals-of-Image-Processing-Computer-Vision-with-MATLAB-60-2048.jpg)

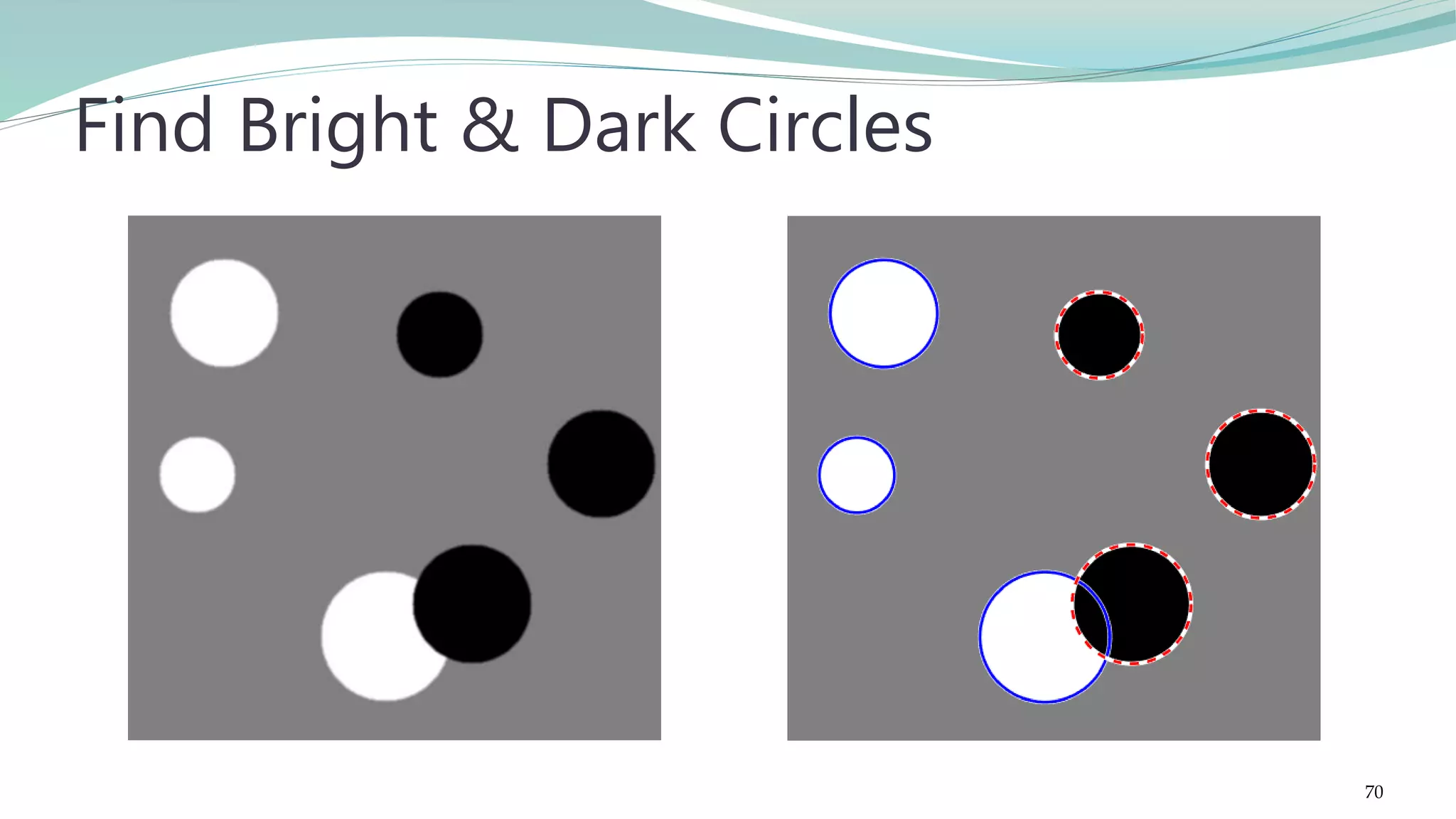
![clc; clear; A = imread('circlesBrightDark.png'); figure;imshow(A); Rmin = 30; Rmax = 65; [centersBright, radiiBright] = imfindcircles(A,[Rmin … Rmax],'ObjectPolarity','bright'); [centersDark, radiiDark] = imfindcircles(A,[Rmin … Rmax],'ObjectPolarity','dark'); figure;imshow(A); viscircles(centersBright, radiiBright,'EdgeColor','b'); viscircles(centersDark, radiiDark,'LineStyle','--'); Find Bright & Dark Circles 69](https://image.slidesharecdn.com/imageprocessingcomputervisionwithmatlab-170402164022/75/Fundamentals-of-Image-Processing-Computer-Vision-with-MATLAB-69-2048.jpg)
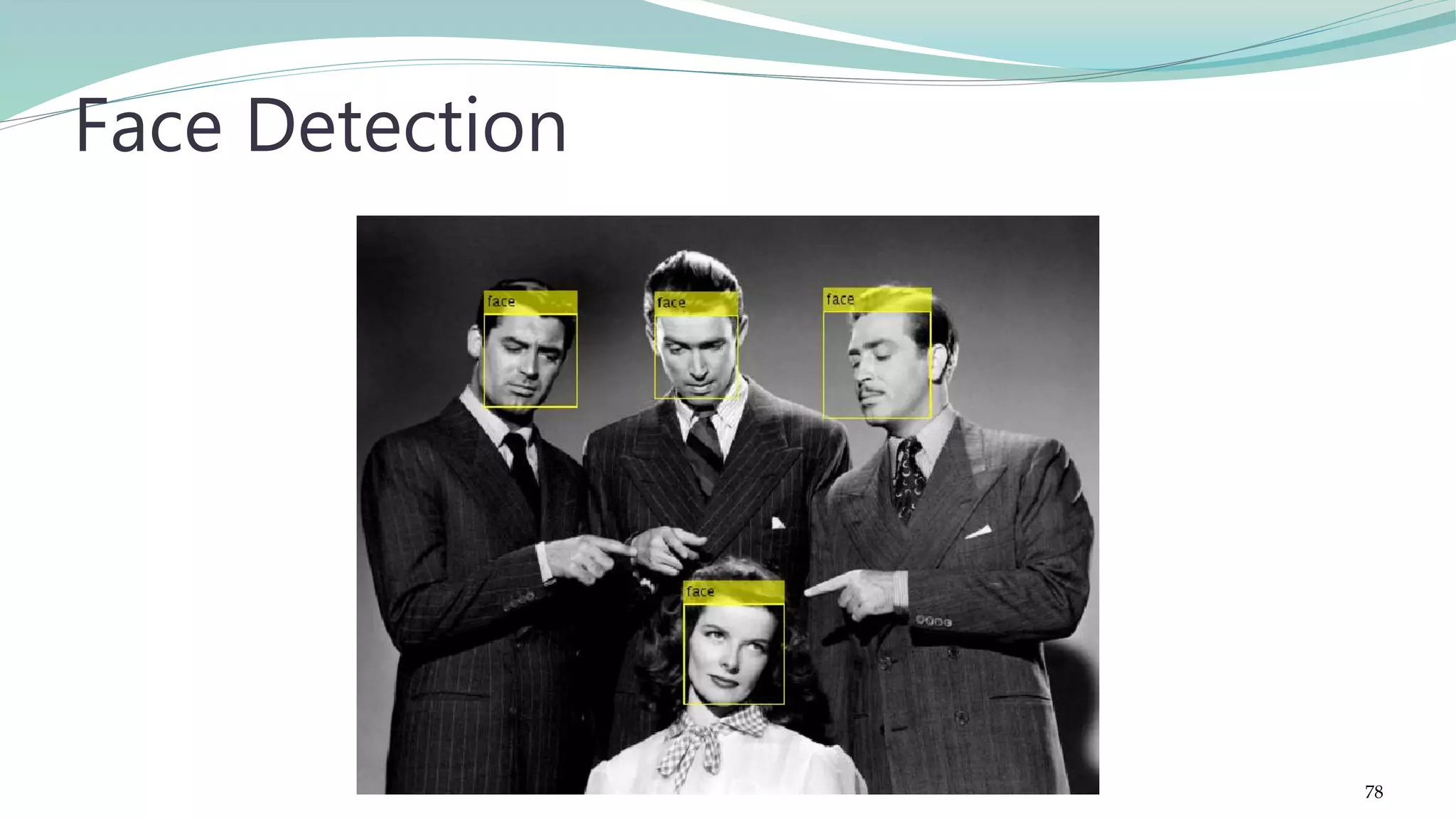
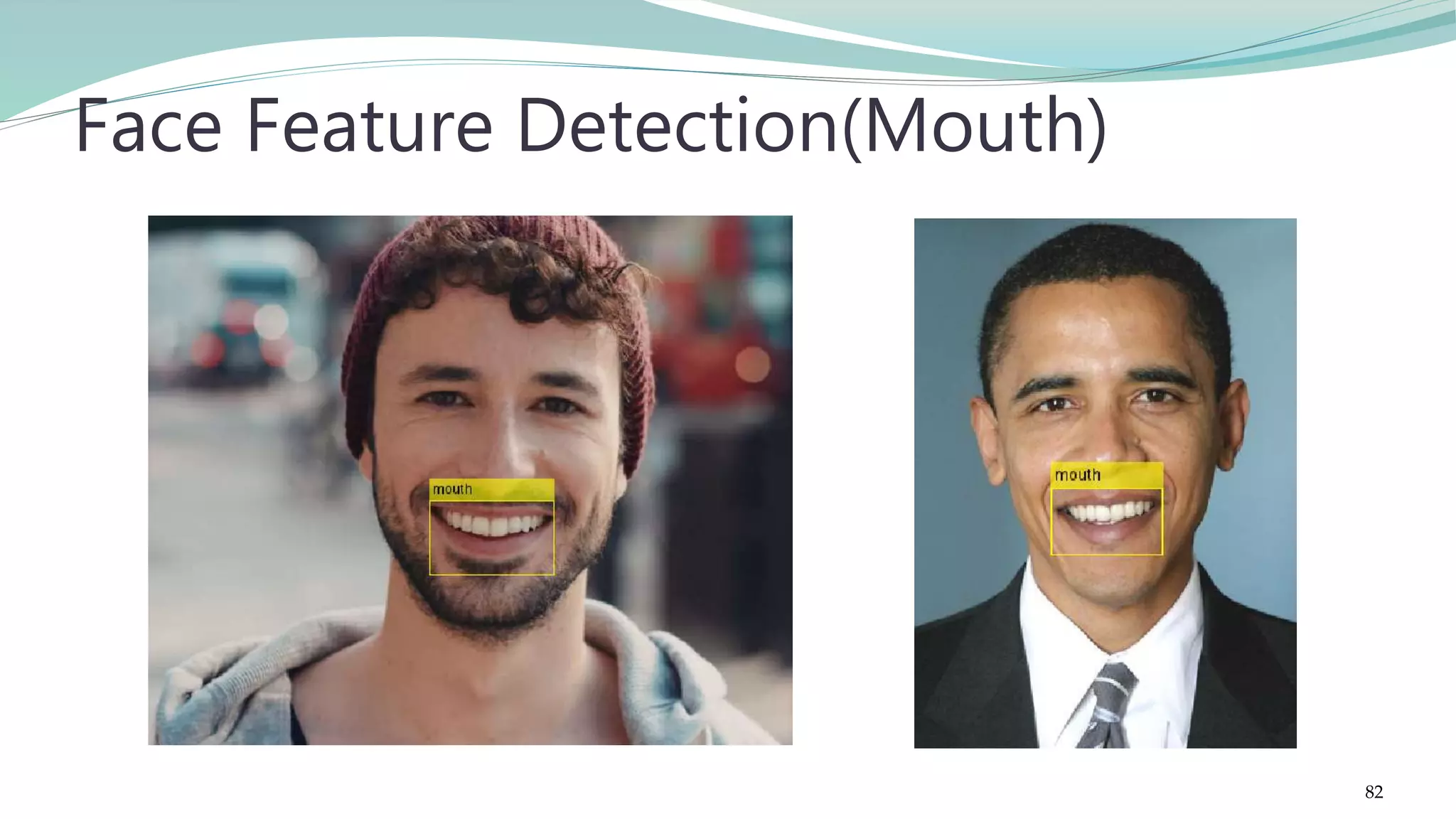
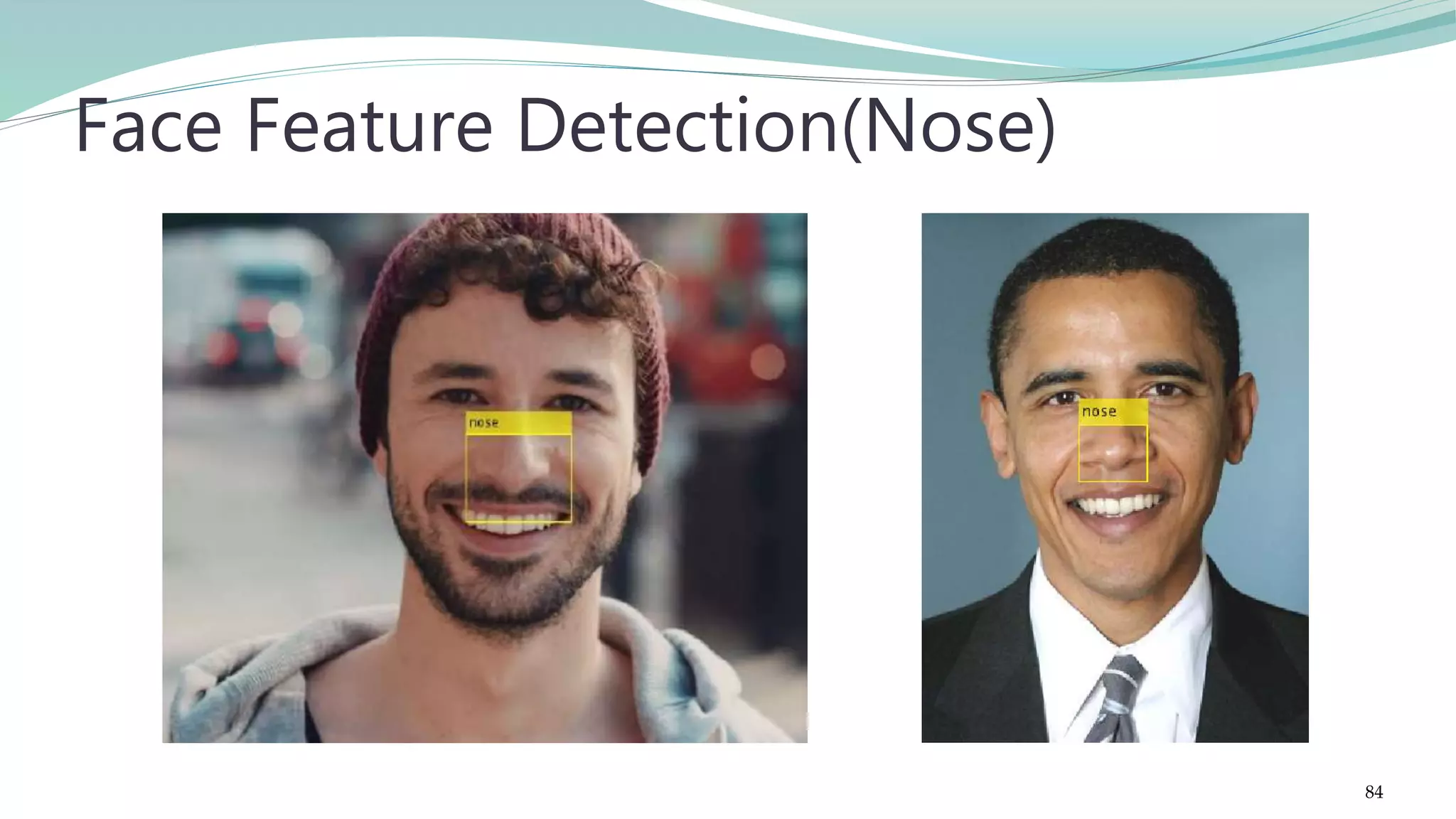
![The cascade object detector uses the Viola-Jones algorithm to detect people's faces, noses, eyes, mouth, or upper body. detector = vision.CascadeObjectDetector creates a System object, detector, that detects objects using the Viola-Jones algorithm. The ClassificationModel property controls the type of object to detect. By default, the detector is configured to detect faces. BBOX = step(detector,I) returns BBOX, an M-by-4 matrix defining M bounding boxes containing the detected objects. This method performs multiscale object detection on the input image, I. Each row of the output matrix, BBOX, contains a four-element vector, [x y width height], that specifies in pixels, the upper-left corner and size of a bounding box. The input image I, must be a grayscale or truecolor (RGB) image. Cascade Object Detection 76](https://image.slidesharecdn.com/imageprocessingcomputervisionwithmatlab-170402164022/75/Fundamentals-of-Image-Processing-Computer-Vision-with-MATLAB-76-2048.jpg)
![clc; clear; faceDetector = vision.CascadeObjectDetector(); obj =imaq.VideoDevice('winvideo', 1, 'YUY2_640x480','ROI', … [1 1 640 480]); set(obj,'ReturnedColorSpace', 'rgb'); figure('menubar','none','tag','webcam'); Face Detection from live video stream 86](https://image.slidesharecdn.com/imageprocessingcomputervisionwithmatlab-170402164022/75/Fundamentals-of-Image-Processing-Computer-Vision-with-MATLAB-86-2048.jpg)
![while (true) frame=step(obj); bbox=step(faceDetector,frame); boxInserter = vision.ShapeInserter('BorderColor','Custom',... 'CustomBorderColor',[255 255 0]); videoOut = step(boxInserter, frame,bbox); imshow(videoOut,'border','tight'); f=findobj('tag','webcam'); Face Detection from live video stream 87](https://image.slidesharecdn.com/imageprocessingcomputervisionwithmatlab-170402164022/75/Fundamentals-of-Image-Processing-Computer-Vision-with-MATLAB-87-2048.jpg)
![if (isempty(f)); [hueChannel,~,~] = rgb2hsv(frame); hold off noseDetector = vision.CascadeObjectDetector('Nose'); faceImage = imcrop(frame,bbox); noseBBox = step(noseDetector,faceImage); videoInfo = info(obj); ROI=get(obj,'ROI'); VideoSize = [ROI(3) ROI(4)]; tracker = vision.HistogramBasedTracker; initializeObject(tracker, hueChannel, bbox); release(obj); close(gcf) break end % End of if pause(0.05) end % End of While Face Detection from live video stream 88](https://image.slidesharecdn.com/imageprocessingcomputervisionwithmatlab-170402164022/75/Fundamentals-of-Image-Processing-Computer-Vision-with-MATLAB-88-2048.jpg)