Downloaded 126 times

![Depth Images Prediction from a Single RGB Image Training The Network: 1- Scale the output images to [0 1]. 2-Subtraction 127 from input images to center the data (kind of normalization). 3-Initialize the convolution layers using AlexNet pre-trained CNN (Transfer Learning). 4-Training the network using batches (batch size = 32) for 35 Epochs. 5- Save the session and model in the end of each Epoch.](https://image.slidesharecdn.com/depthestimationusingdeeplearning-170506000656/75/Depth-estimation-using-deep-learning-24-2048.jpg)
![Depth Images Prediction from a Single RGB Image Training The Network: 1- Scale the label images to [0 1]. 2-Subtraction 127 from input images to center the data (kind of normalization). 3-Initialize the convolution layers using AlexNet pre-trained CNN (Transfer Learning). 4-Training the network using batches (batch size = 32) for 35 Epochs. 5- Save the session and model in the end of each Epoch.](https://image.slidesharecdn.com/depthestimationusingdeeplearning-170506000656/75/Depth-estimation-using-deep-learning-25-2048.jpg)
![Depth Images Prediction from a Single RGB Image Training The Network: 1- Scale the label images to [0 1]. 2-Subtraction 127 from input images to center the data (kind of normalization). 3-Initialize the convolution layers using AlexNet pre-trained CNN (Transfer Learning). 4-Training the network using batches (batch size = 32) for 35 Epochs. 5- Save the session and model in the end of each Epoch.](https://image.slidesharecdn.com/depthestimationusingdeeplearning-170506000656/75/Depth-estimation-using-deep-learning-26-2048.jpg)
![Depth Images Prediction from a Single RGB Image Training The Network: 1- Scale the label images to [0 1]. 2-Subtraction 127 from input images to center the data (kind of normalization). 3-Initialize the convolution layers using AlexNet pre-trained CNN (Transfer Learning). 4-Training the network using batches (batch size = 32) for 35 Epochs. 5- Save the session and model in the end of each Epoch.](https://image.slidesharecdn.com/depthestimationusingdeeplearning-170506000656/75/Depth-estimation-using-deep-learning-27-2048.jpg)
![Depth Images Prediction from a Single RGB Image Training The Network: 1- Scale the label images to [0 1]. 2-Subtraction 127 from input images to center the data (kind of normalization). 3-Initialize the convolution layers using AlexNet pre-trained CNN (Transfer Learning). 4-Training the network using batches (batch size = 32) for 35 Epochs. 5- Save the session and model in the end of each Epoch.](https://image.slidesharecdn.com/depthestimationusingdeeplearning-170506000656/75/Depth-estimation-using-deep-learning-28-2048.jpg)



This document summarizes a project that used a deep learning model to predict depth images from single RGB images. It discusses existing solutions using stereo cameras or Kinect devices. The project used the NYU Depth V2 dataset, splitting it into training, validation, and test sets. It implemented a model based on previous work, training it on RGB-D image pairs for 35 epochs but achieving only moderate results due to limited training data. The code and results are available online for further exploration.
Introduction to depth image predictions using deep learning, including agenda of the presentation.
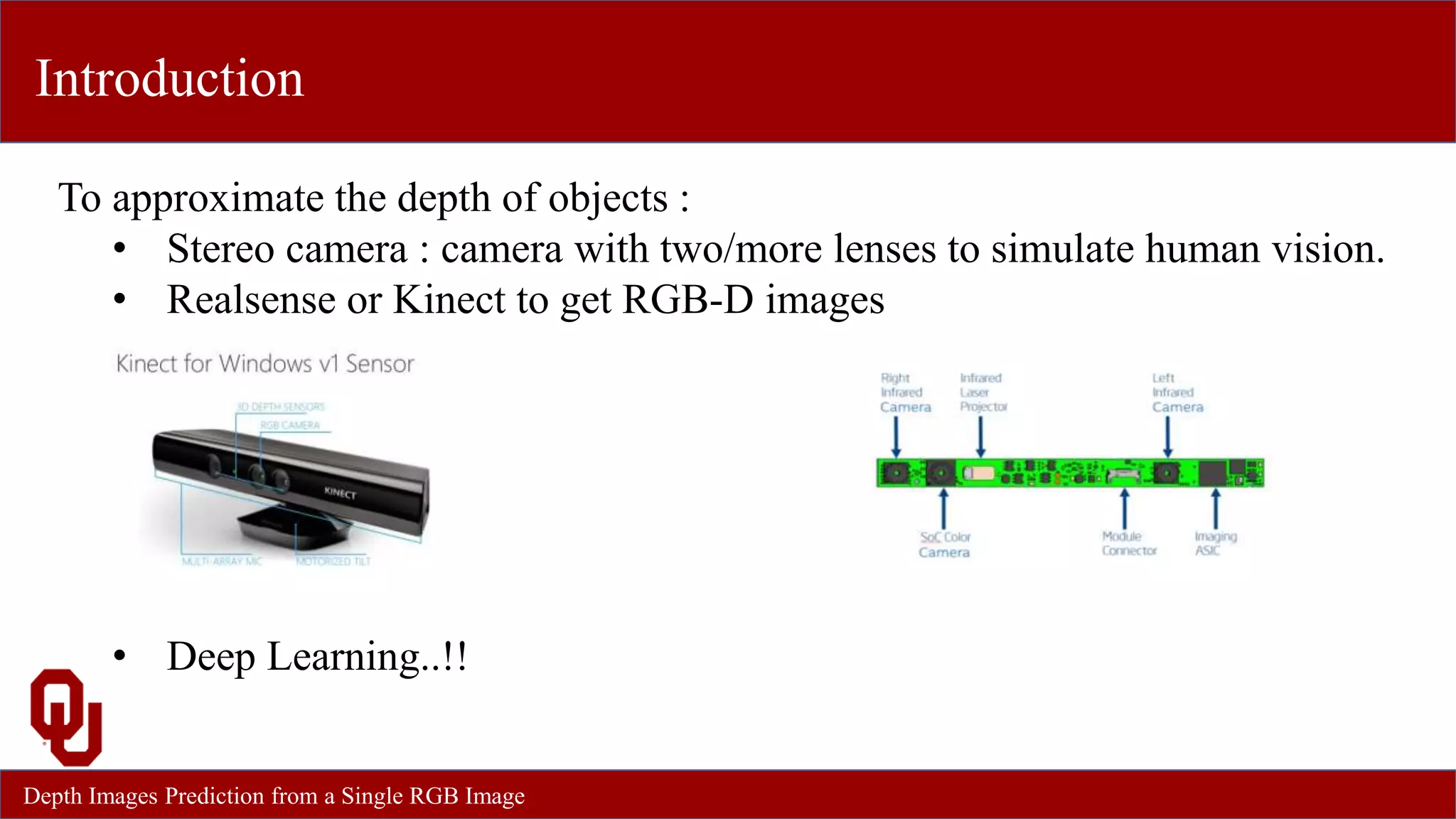
Definition of depth maps and RGB-D images, methods for approximating depth such as stereo cameras and Realsense.
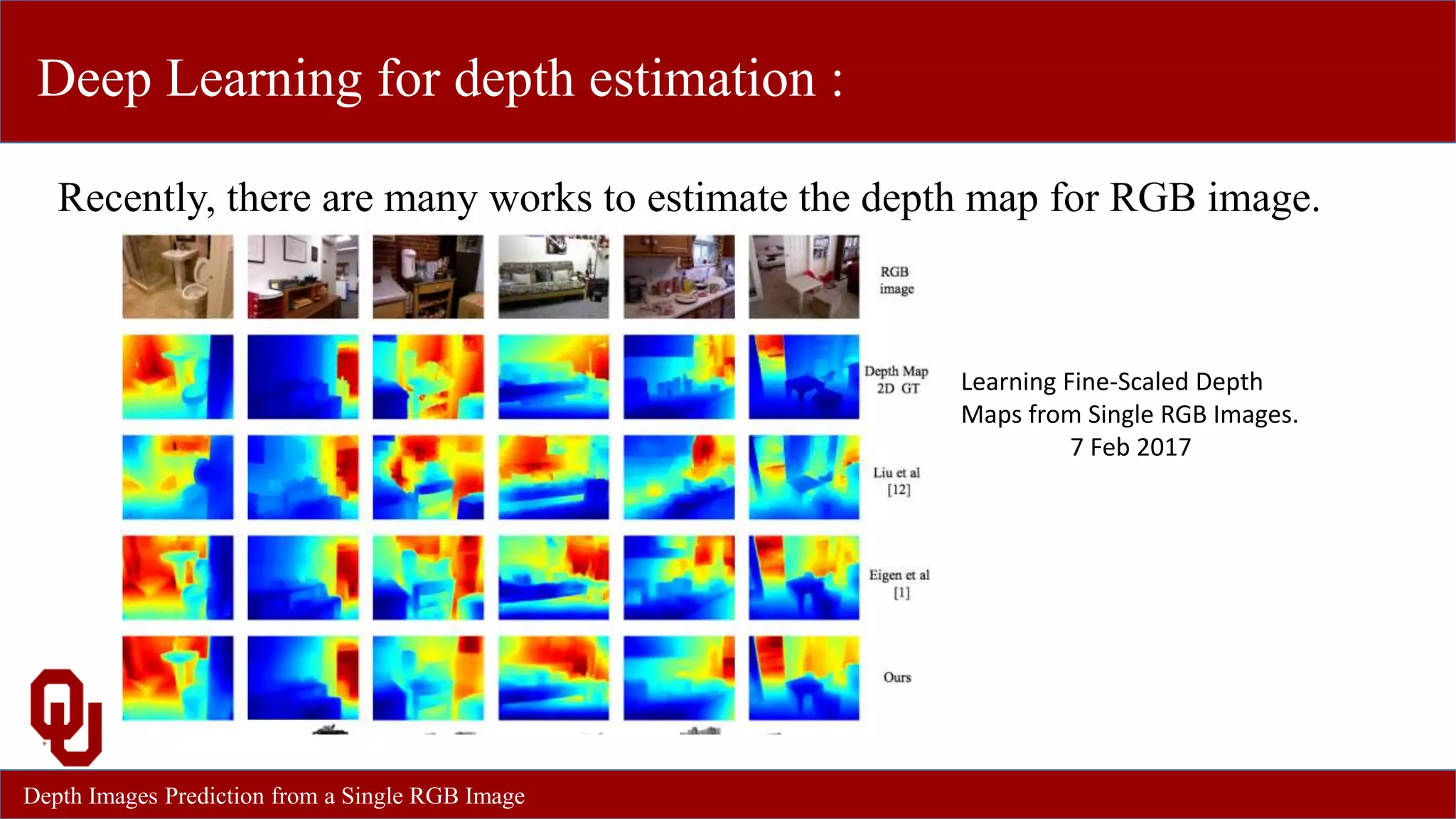
Overview of deep learning approaches for estimating depth maps from RGB images and previous research contributions.
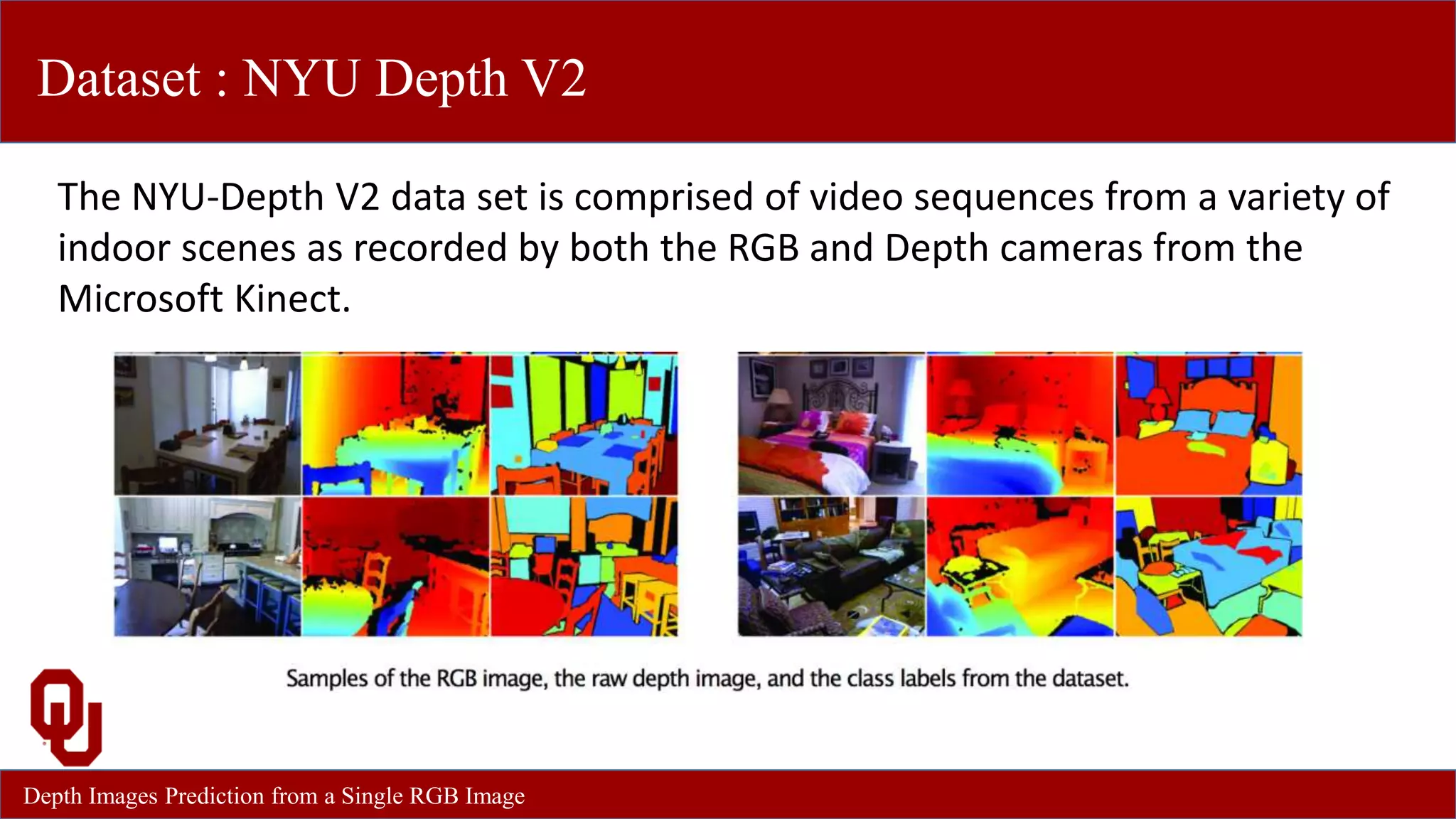
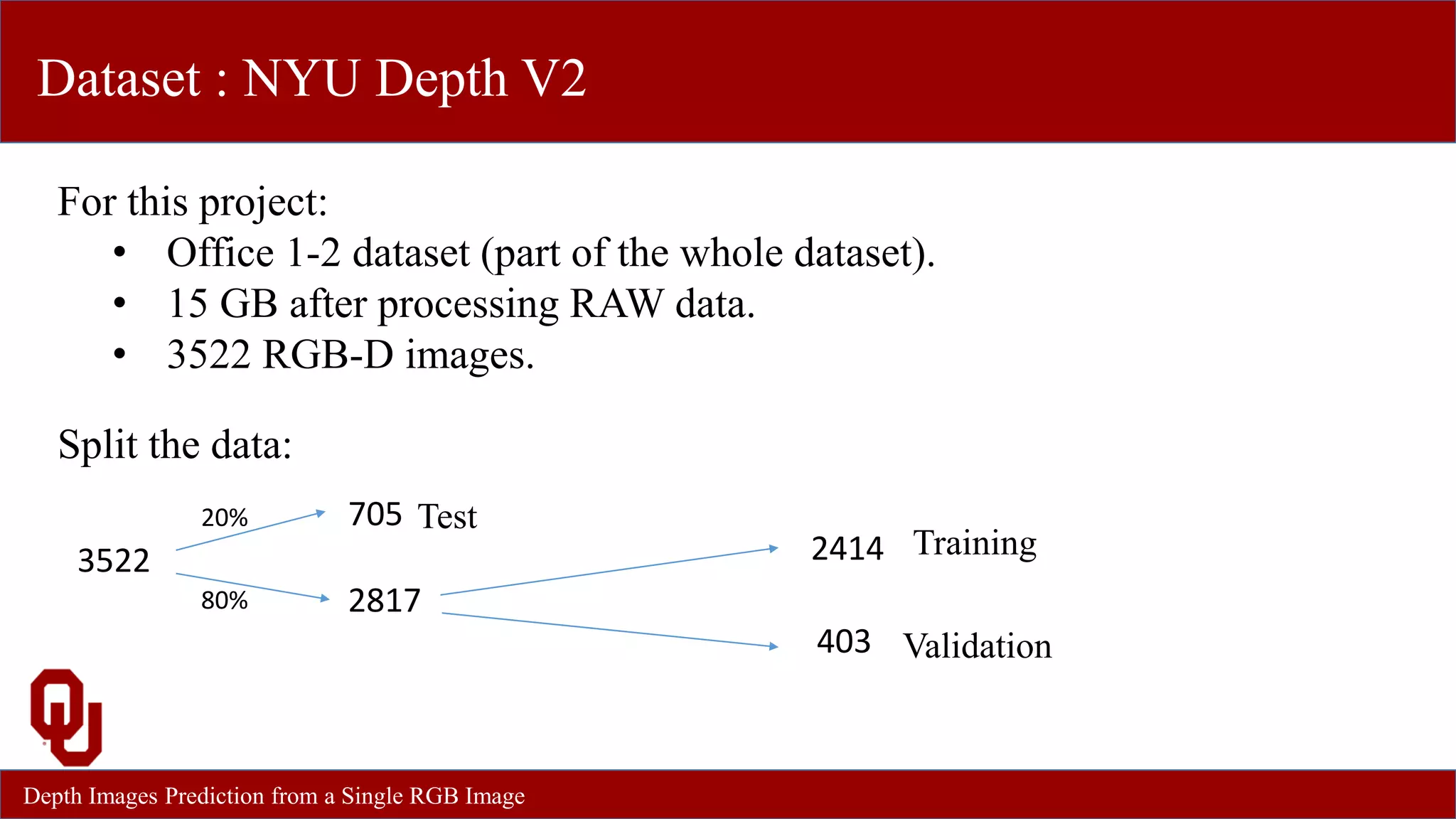
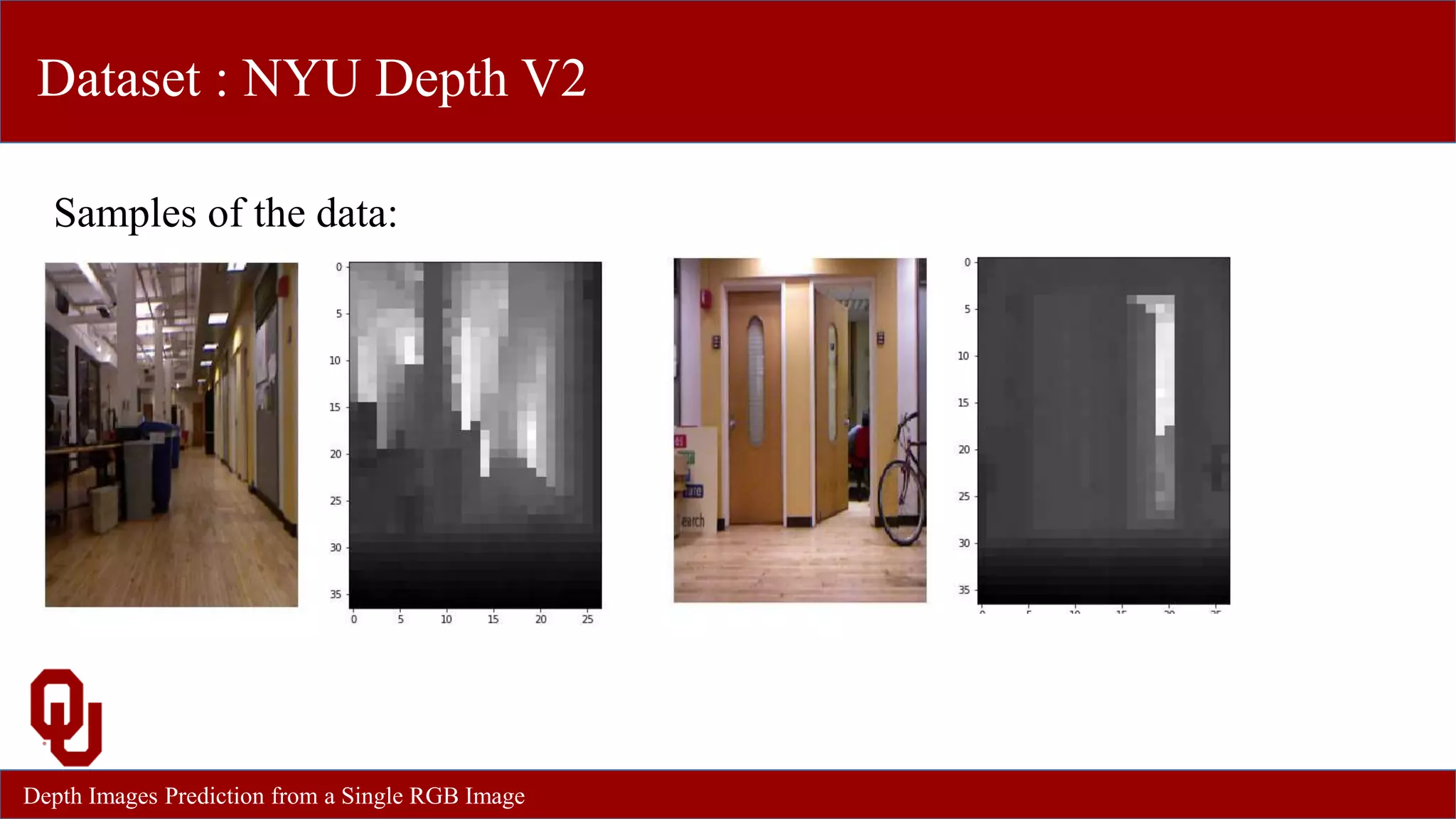
Details of the NYU Depth V2 dataset including amount of RGB-D images and how the dataset is split into training, validation, and testing.
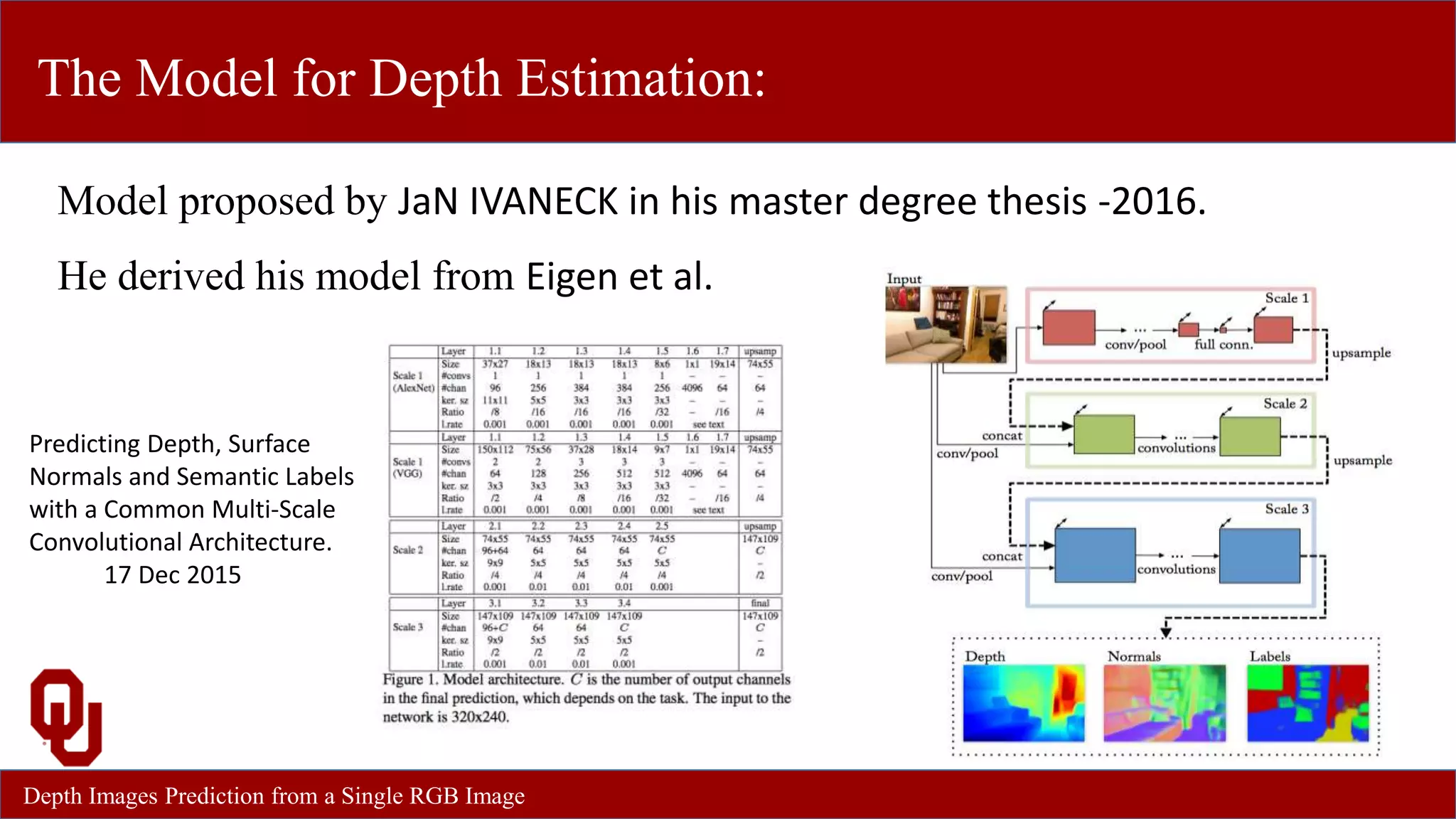
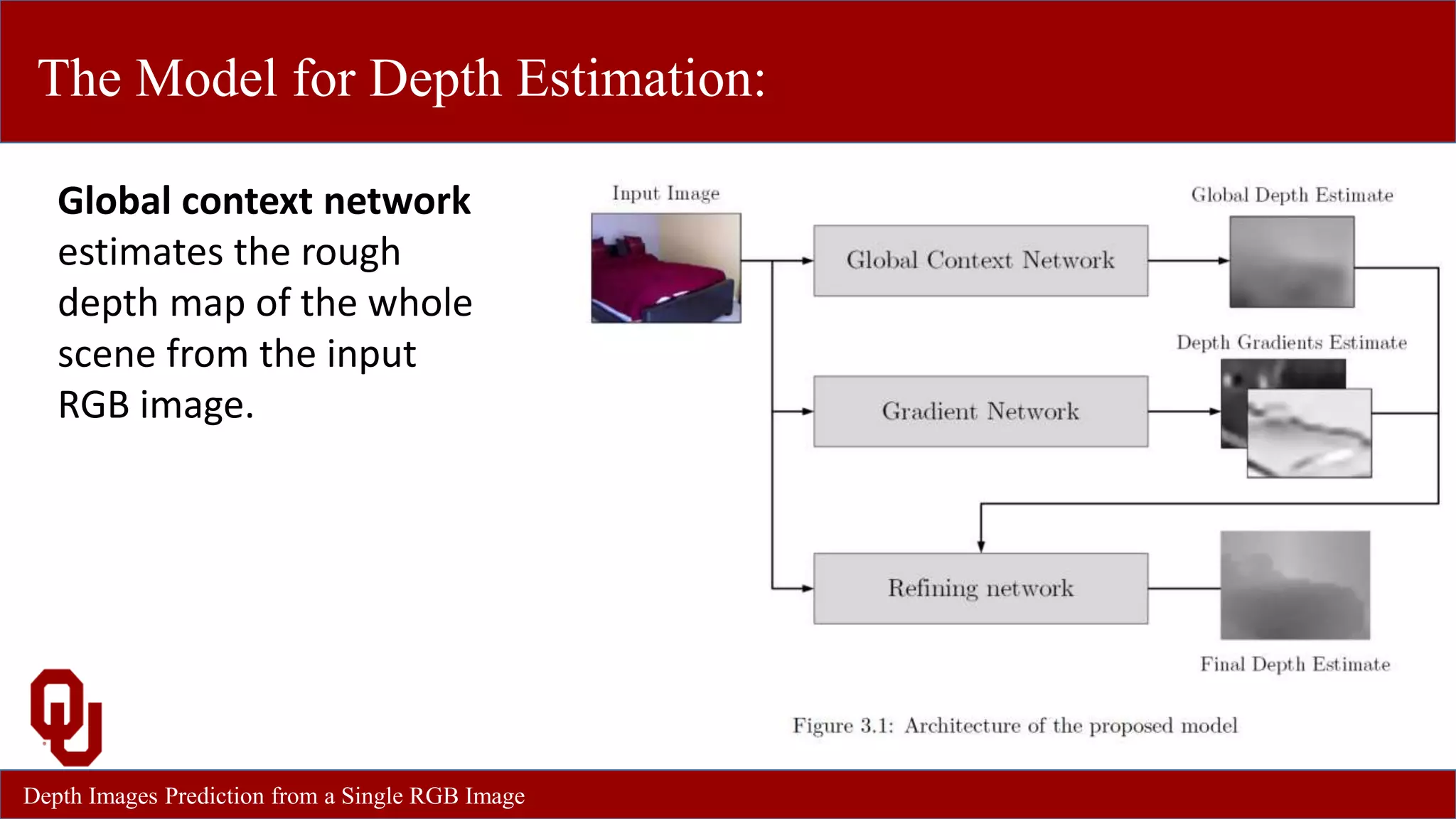
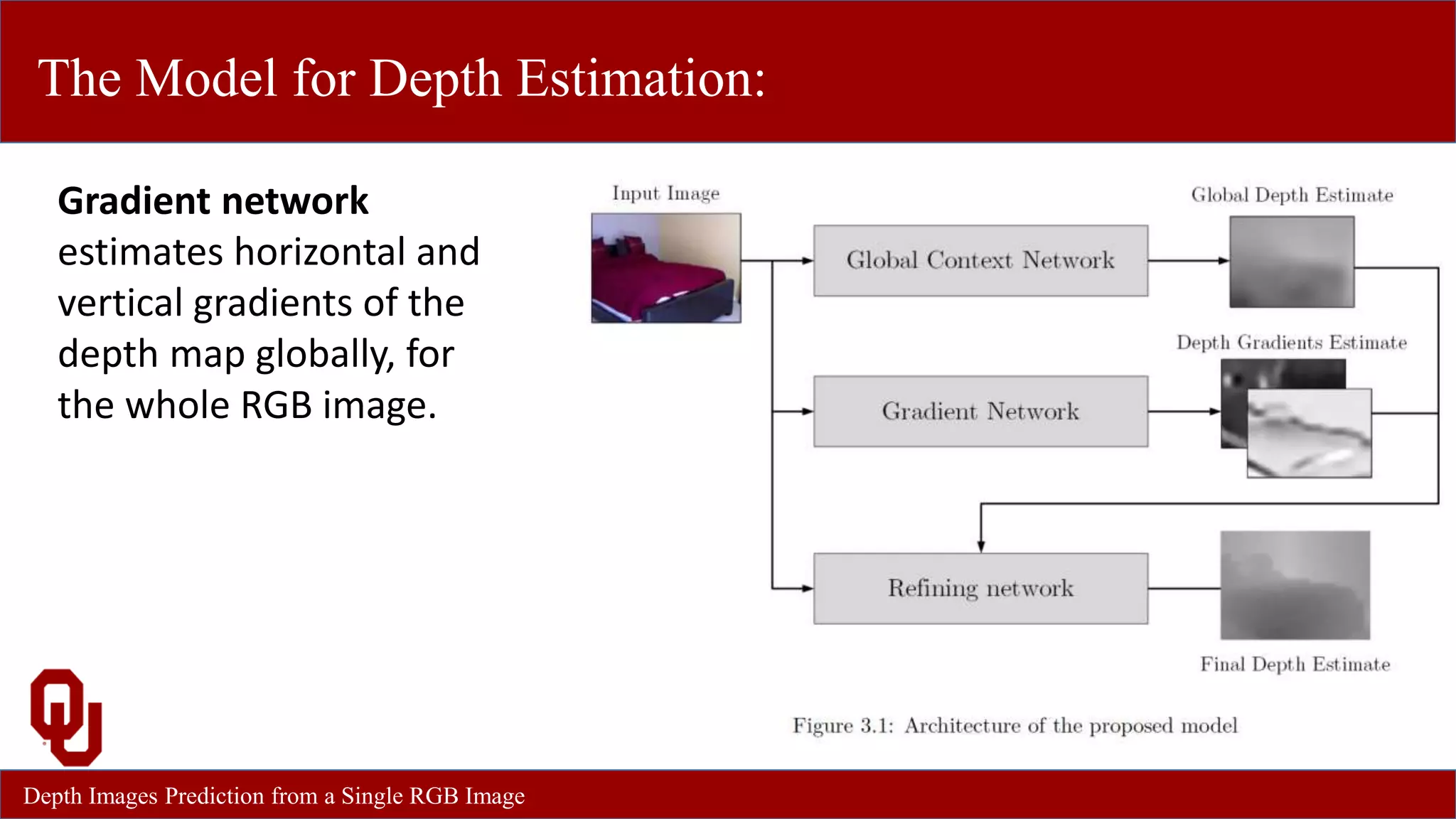
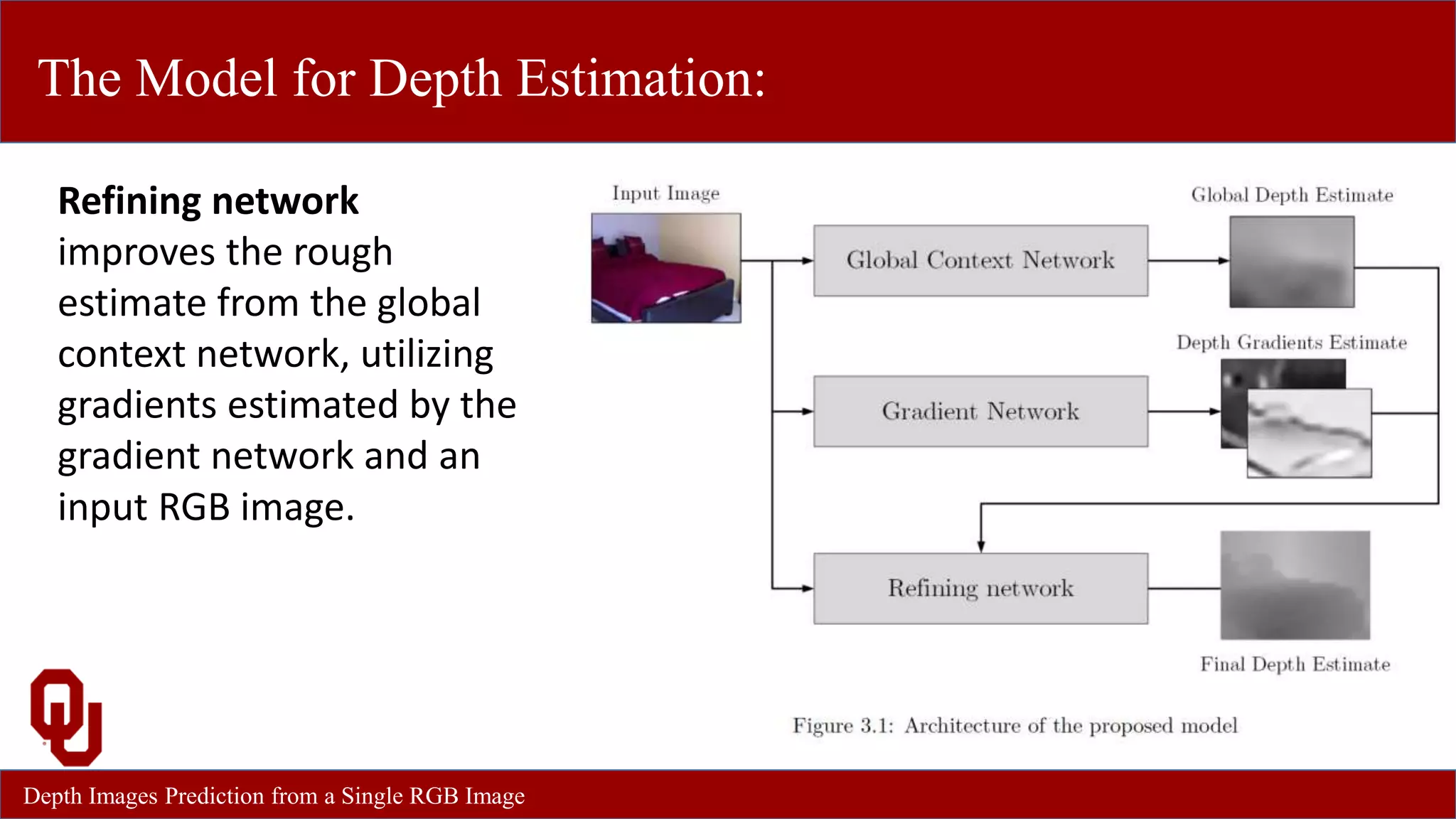
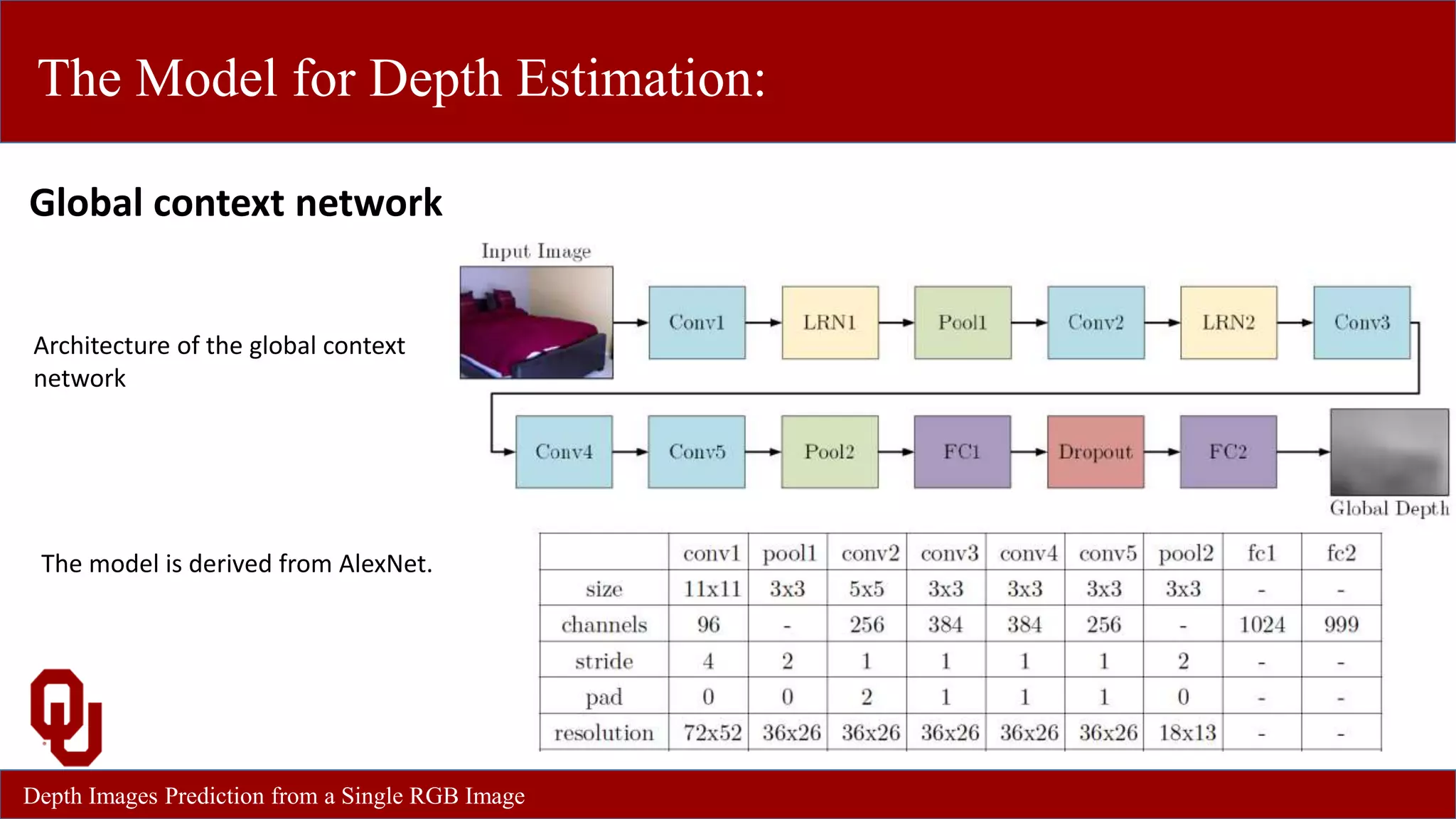
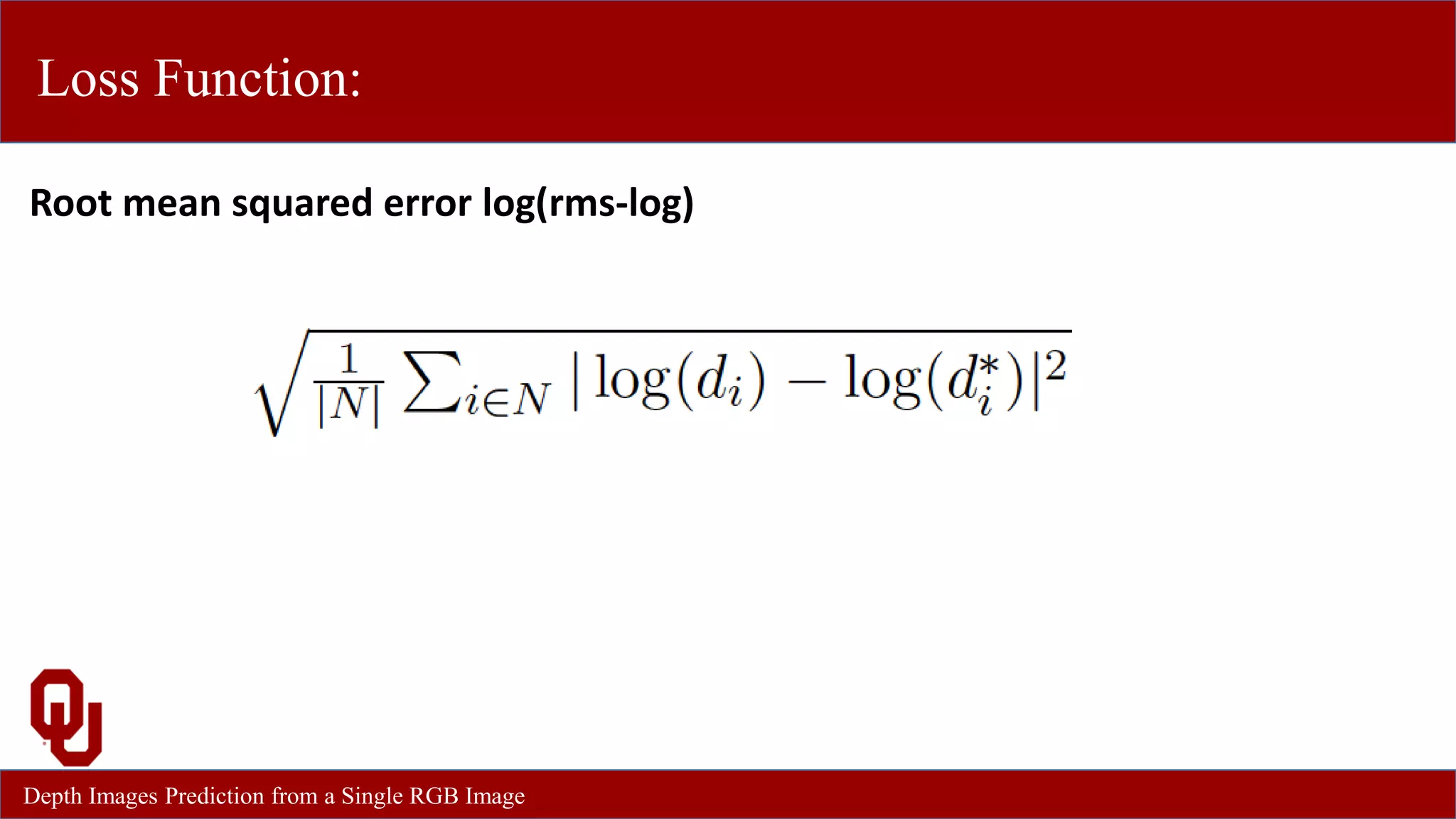
Description of depth estimation model proposed by Jan Ivaneck, including architecture and loss function used.
Steps involved in training the model, including scaling, normalization, layers initialization, and training epochs.
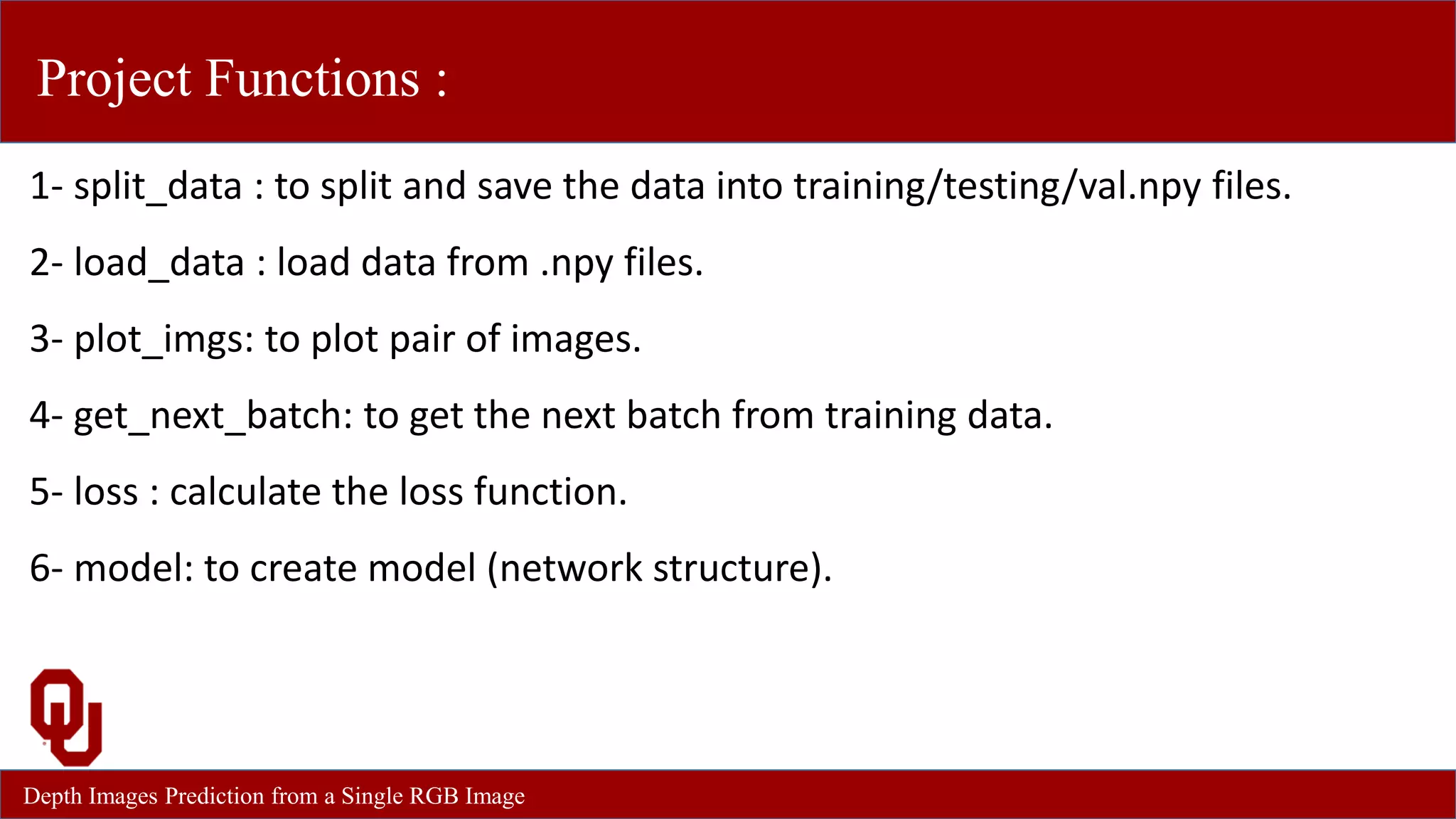
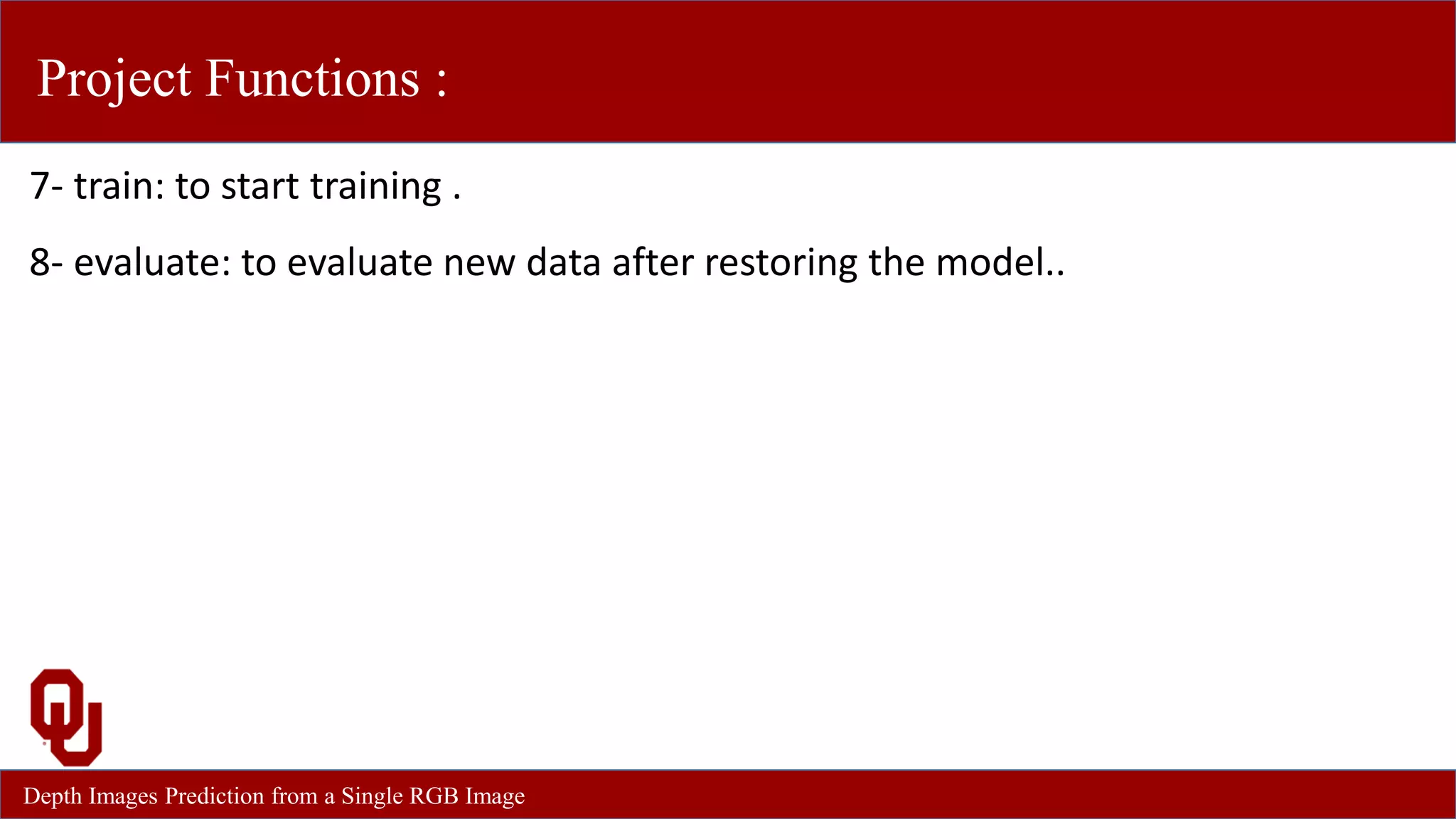
Details on various project functions such as data splitting, loading, plotting, and evaluating the model.
List of frameworks and libraries used in the project including TensorFlow, Slim, and Matplotlib.
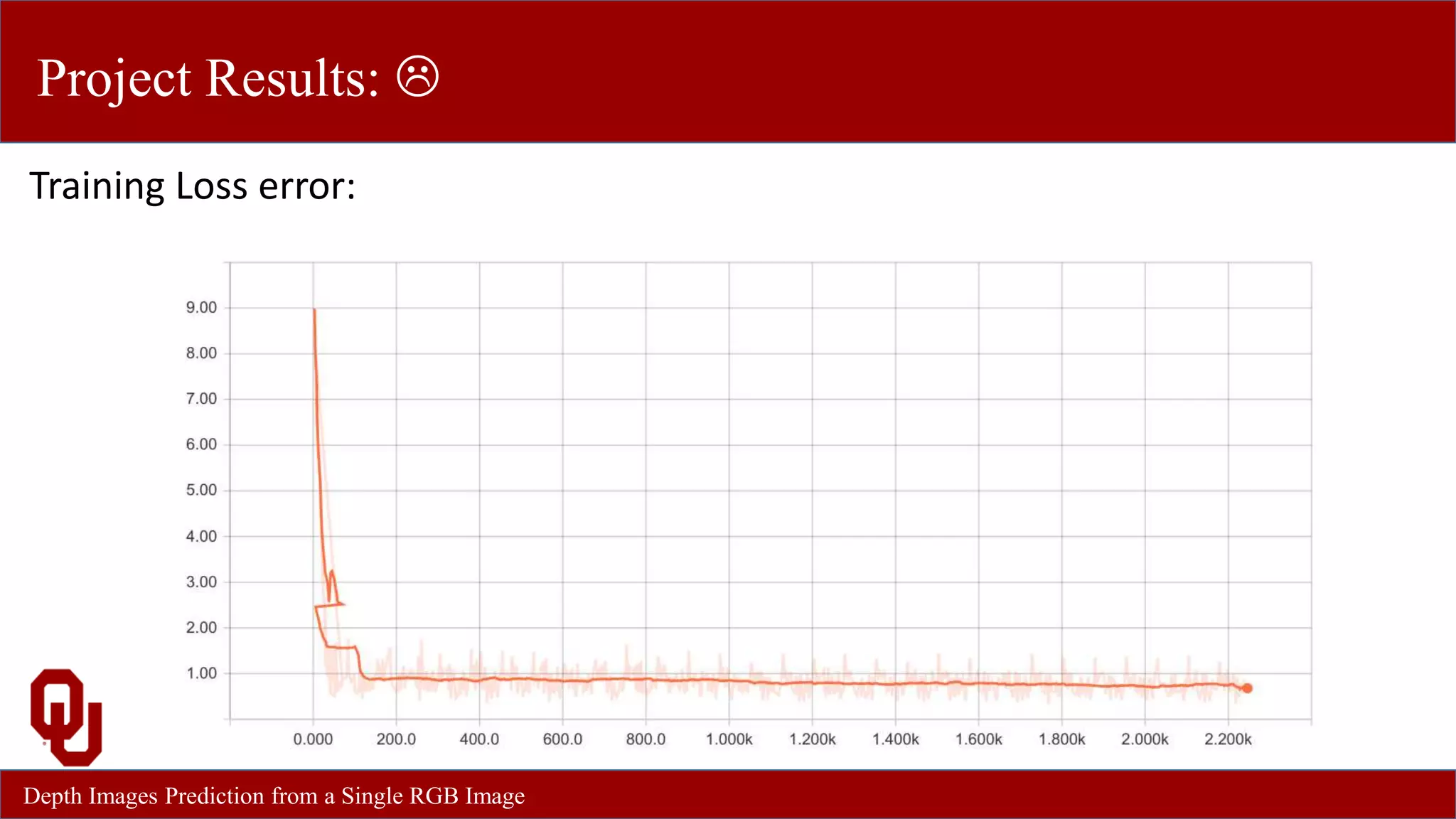
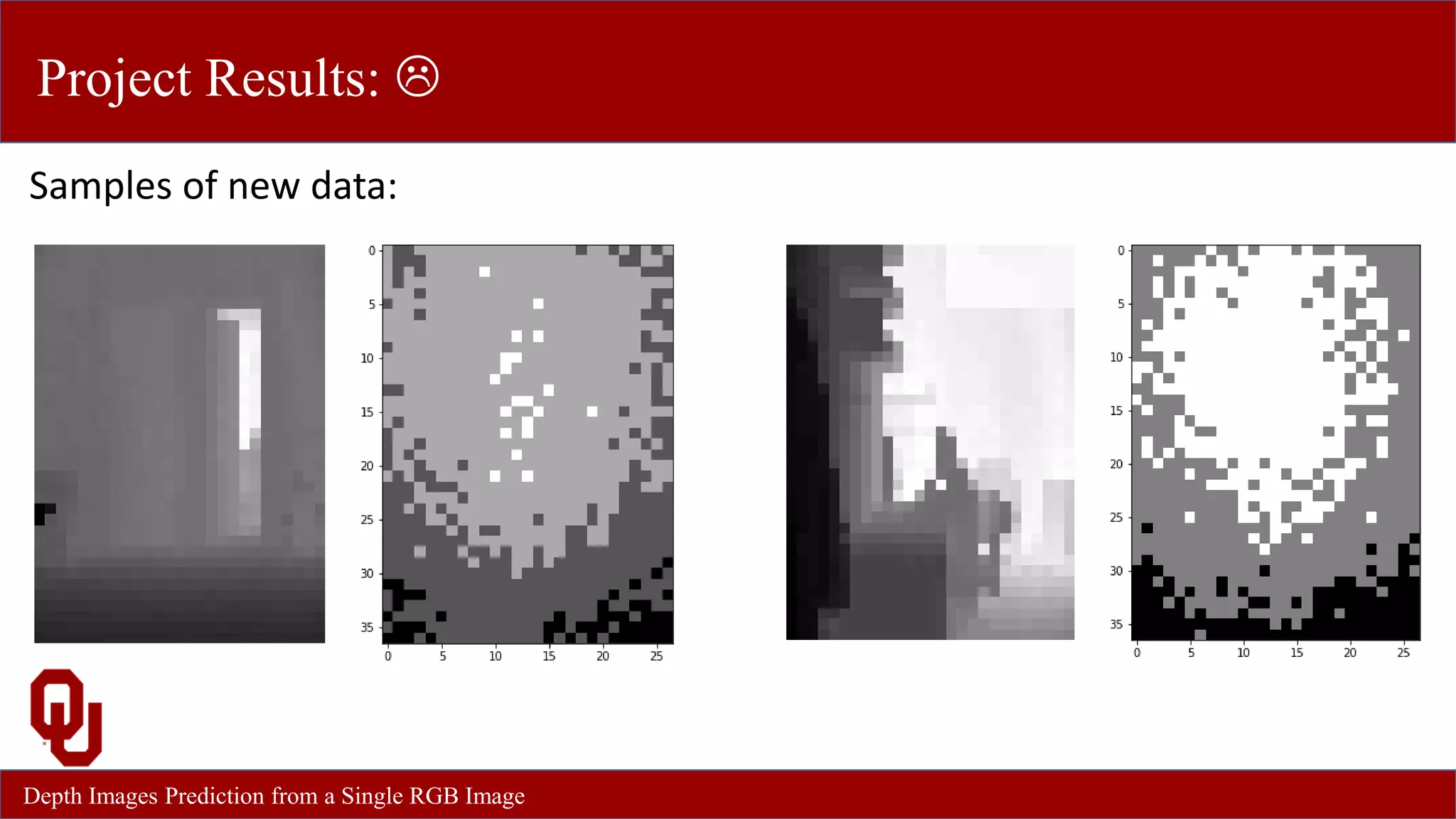
Discussion of training loss, sample results, and challenges faced due to insufficient training data.
Information on where to access project code and additional resources for depth estimation.
Thanking the audience for their attention.