Download to read offline
![International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 04 Issue: 12 | Dec-2017 www.irjet.net p-ISSN: 2395-0072 © 2017, IRJET | Impact Factor value: 6.171 | ISO 9001:2008 Certified Journal | Page 1797 0 to 9 displayed in front of screen. When button 1 pressed wiper along with servo start rotating from 0 to 180 clockwise and anticlockwise with low constant speed. Car wiper moved with increasing speed clockwise anticlockwise when button 2 is pressed. When we want to stop the servo rotation we need to press button 3. 2.3.3 Work Flow Diagram Of Proposed Work Fig-5: Flowchart of Proposed Procedure 3. CONCLUSIONS Traditional Car wiping system is manually implemented in most of the car depending upon a switch. In some advance case it can be operated through IR remote. In our proposed Technique we can implement Android mobile phone based automatic car wiping system with speed controlling technique according to increasing rain intensity with more accurate wireless communication. Here we can use HC-05 slave Bluetooth which can be connected with android device. In this particular project work a car driver can operate this wiping technology using his android phone so that’s why this work is also perfect for short range communication. 4. REFERENCES [1] Nateq Be-Nazir Ibn Minar & Mohammed Tarique, “Bluetooth Security Threats And Solutions: A Survey”, International Journal of Distributed and Parallel Systems (IJDPS) Vol.3, No.1, January 2012, pages127-148. [2] Trishna Panse, Vivek Kapoor, “A Review on Security Mechanism of Bluetooth Communication”, Trishna Panse et al, / (IJCSIT) International Journal of Computer Science and Information Technologies, Vol. 3 (2), 2012, pages 3419-3422. [3] Kadakia Nishant, Kothari Mohit, Shah Amit, Patel Vipul R4., "Automatic Rain Operated Wiper System in Automobile: A Review ",IJSRD - International Journal for Scientific Research & Development| Vol. 3, Issue 02, 2015 | ISSN (online): 2321-0613 [4] Usha Tiwari, Kushal Sarin, Jatin Sethi, Anshuman Gupta and Ishan Mathur, "AUTOMATIC CONTROL OF VEHICLES: An Analysis", International Journal of Advanced Research in Computer and Communication Engineering Vol. 2, Issue 4, April 2013 [5] Anuradha S. Joshi ,Sheeja S. Suresh., "REVIEW REPORT ON SOC ON VARIOUS PLATFORMS FOR VEHICLES" ,International Research Journal of Engineering and Technology (IRJET) [6] Zhao Xiaoyu et.ai., "Based On Matlab Electrically Operated Wind shield Wiper Systems Design Method Research Based On Matlab Electrically Operated Windshield Wiper Systems Design Method Research" Third International Conference on Measuring Technology and Mechatronics Automation, 2011, pp. 621-624. [7] Subankar Roy, Tashi Rapden Wang chuk, Rajesh Bhatt- Arduino Based Bluetooth Controlled Robot International Journal of Engineering Trends and Technology (IJETT), ISSN: 2231-5381, Volume-32, Issue-4, February 2016. 5. BIOGRAPHIES Mr. Sourish Mitra, B.Tech(IT) ,M.Tech (Mobile Communication & NetworkTechnology), Assistant Professor, CSE Dept. Gurunanak Institute Of Technology, AICTE, UGC approved Makaut affiliated) Soham Biswas, 1st Year, Computer science of Engineering Student of B.Tech from Indian Institute of Information Technology (IIIT), Kalyani. Mrinmoy Aus, 1st Year, Computer science of Engineering Student of B.Tech from Indian Institute of Information Technology (IIIT), Kalyani.](https://image.slidesharecdn.com/irjet-v4i12329-180119084628/75/Arduino-Based-Bluetooth-Operated-Car-Wiping-Technique-using-Android-Mobile-Phone-4-2048.jpg)

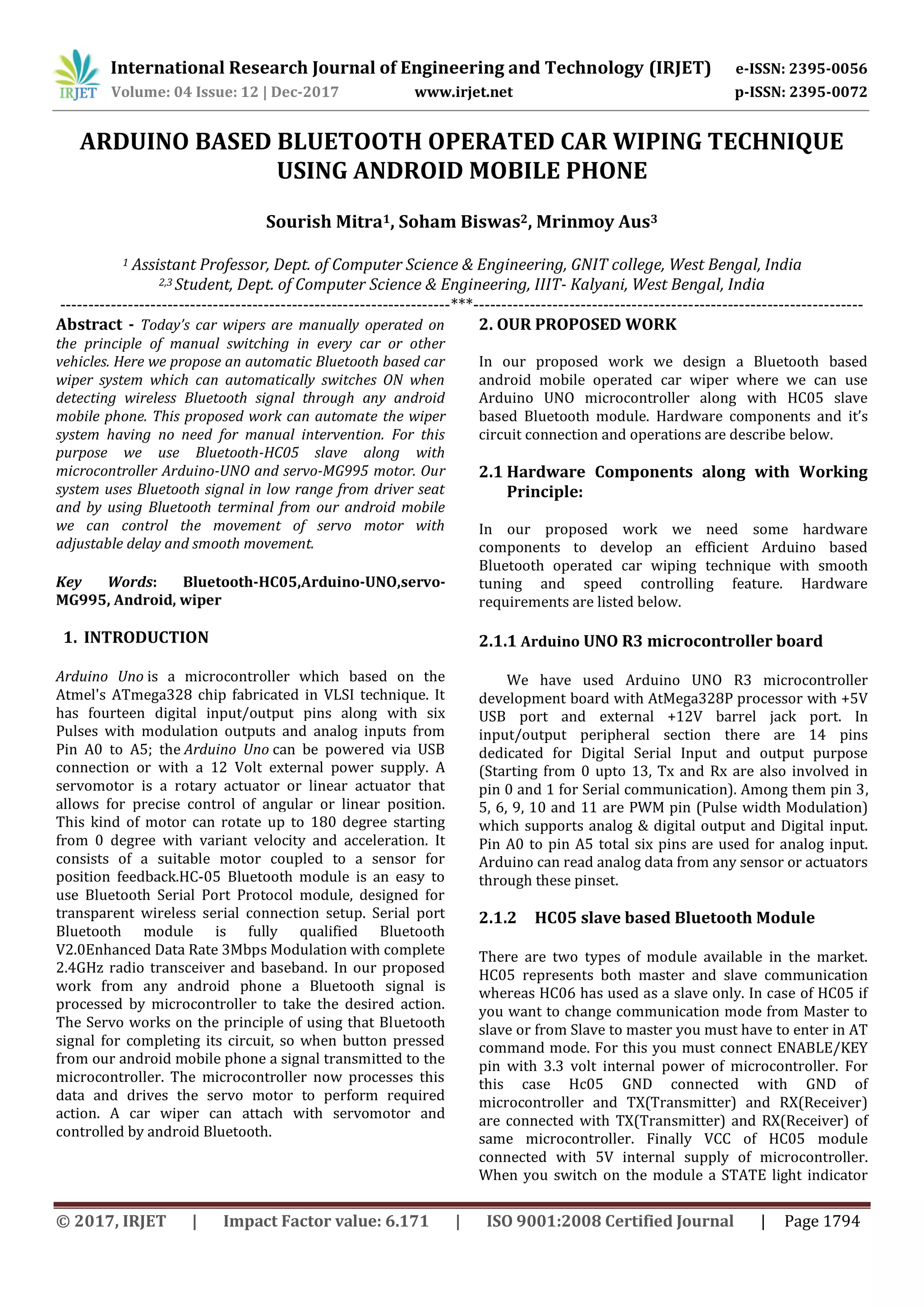
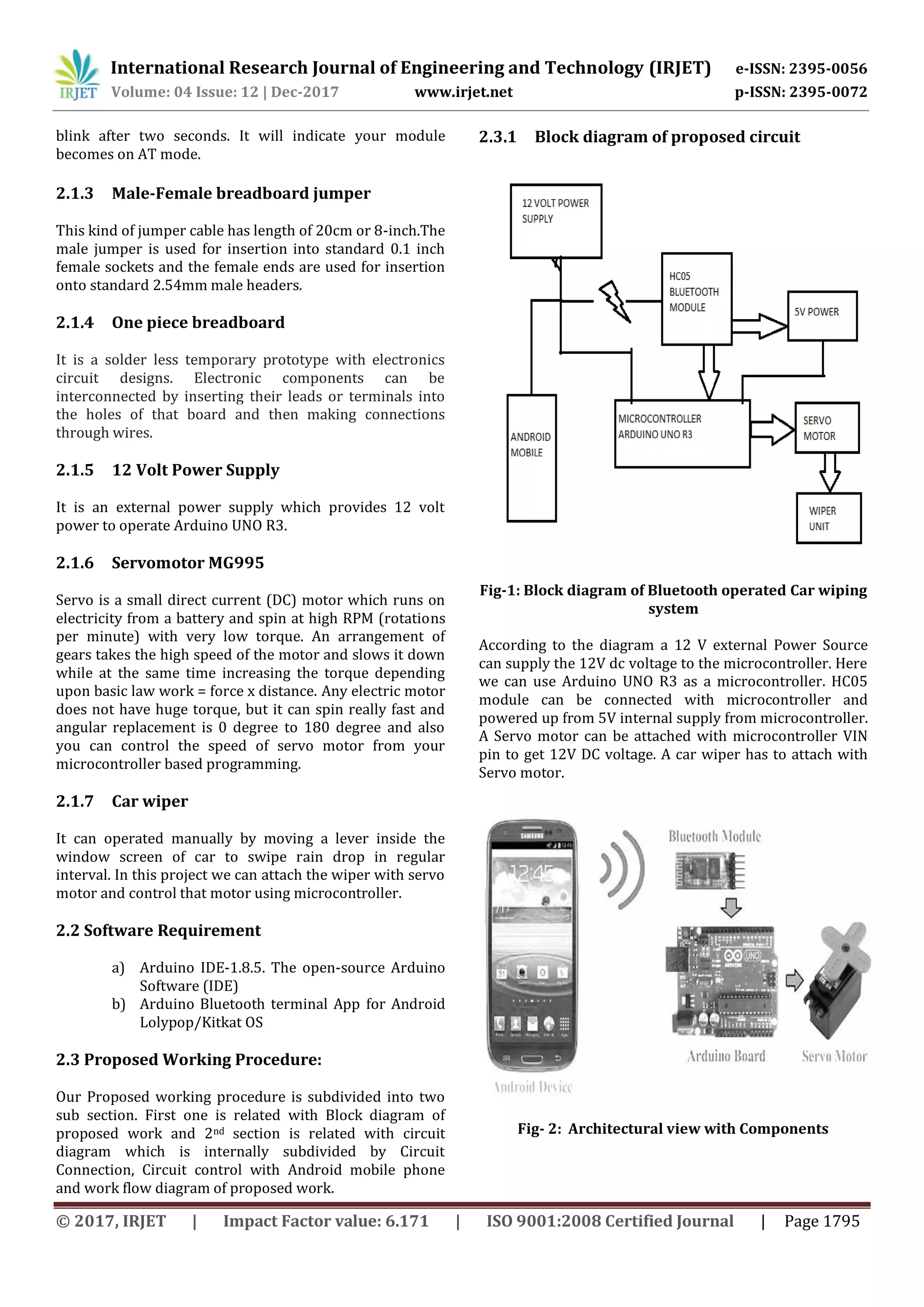
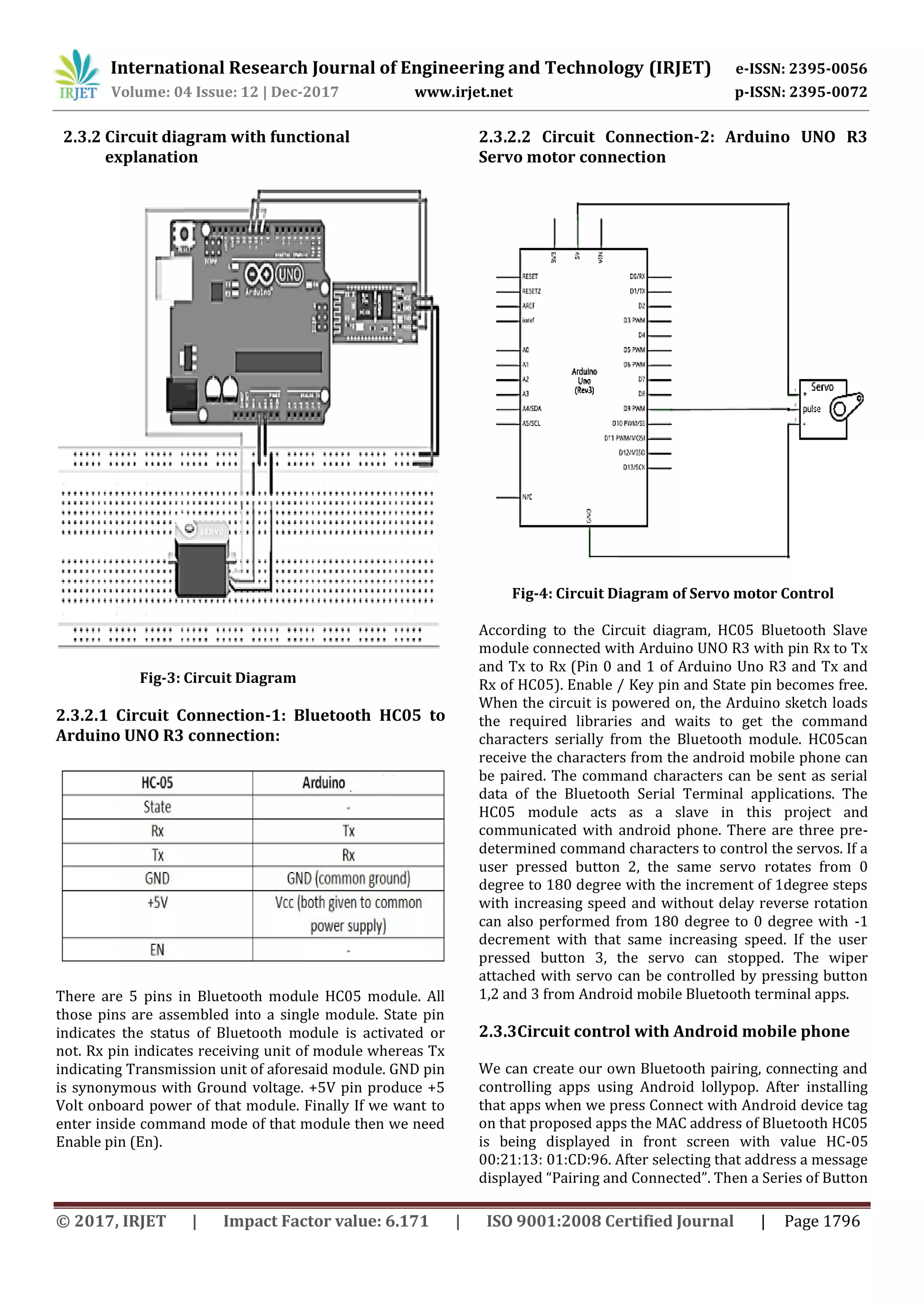
This document describes a Bluetooth-operated car wiper system controlled by an Android mobile phone. The system uses an Arduino Uno microcontroller connected to an HC-05 Bluetooth module and MG995 servo motor. Pressing buttons on a Bluetooth terminal app can control the servo motor and attached wiper. When buttons are pressed, the microcontroller receives Bluetooth signals and drives the servo motor accordingly, allowing remote control of the wiper. The system aims to automate wipers without manual intervention through wireless Bluetooth communication between an Android phone and the vehicle.