Downloaded 165 times
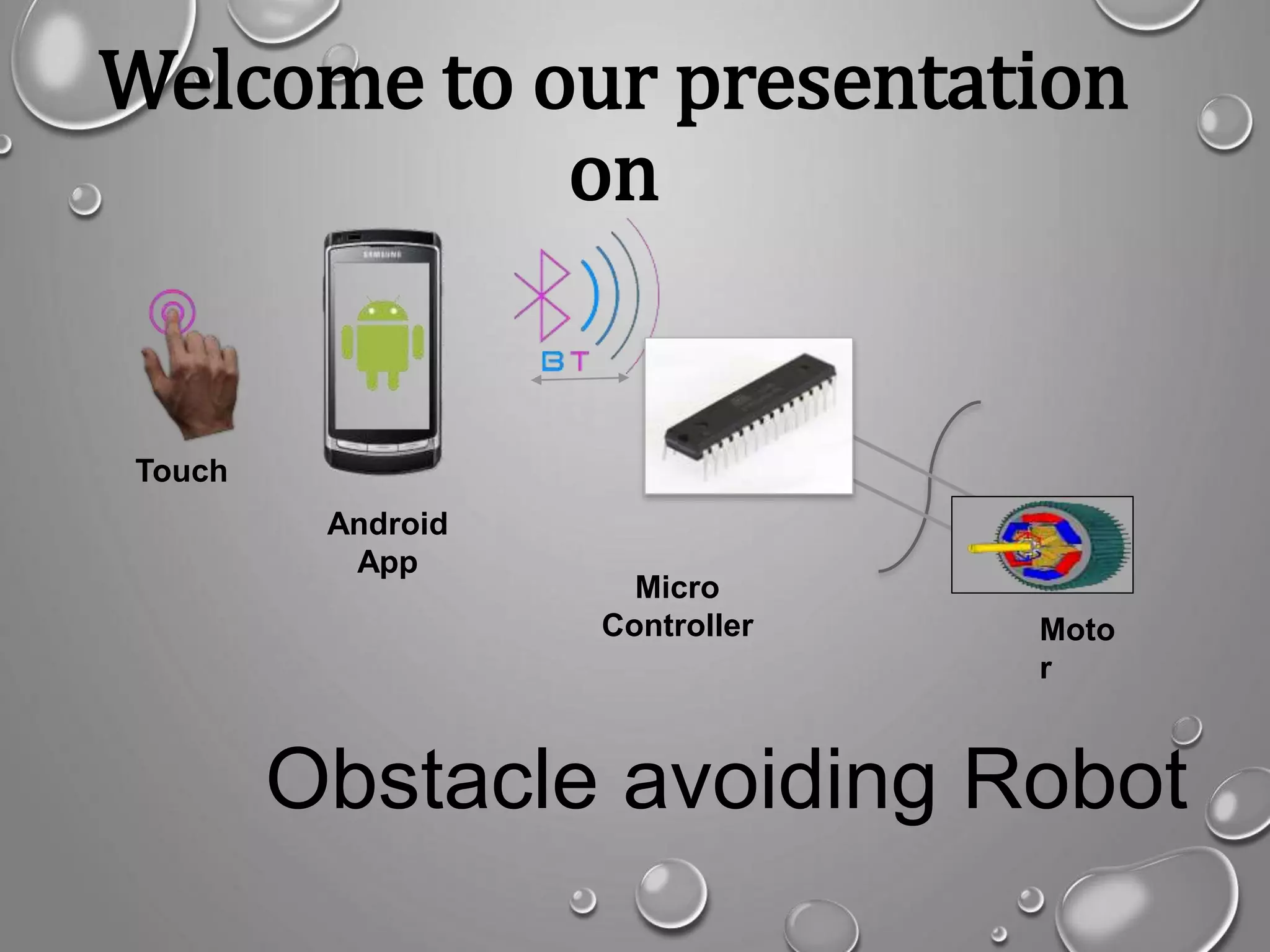
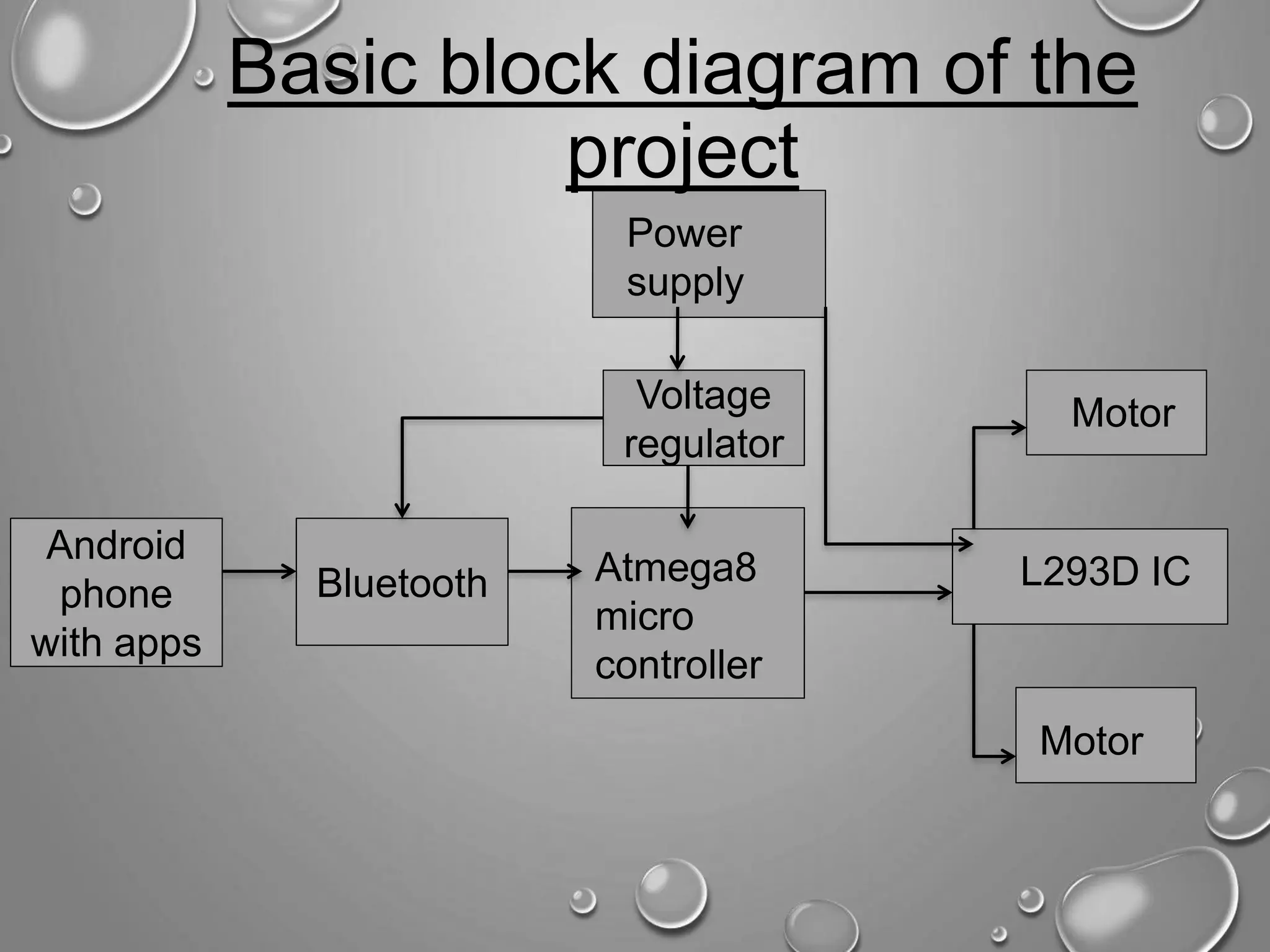
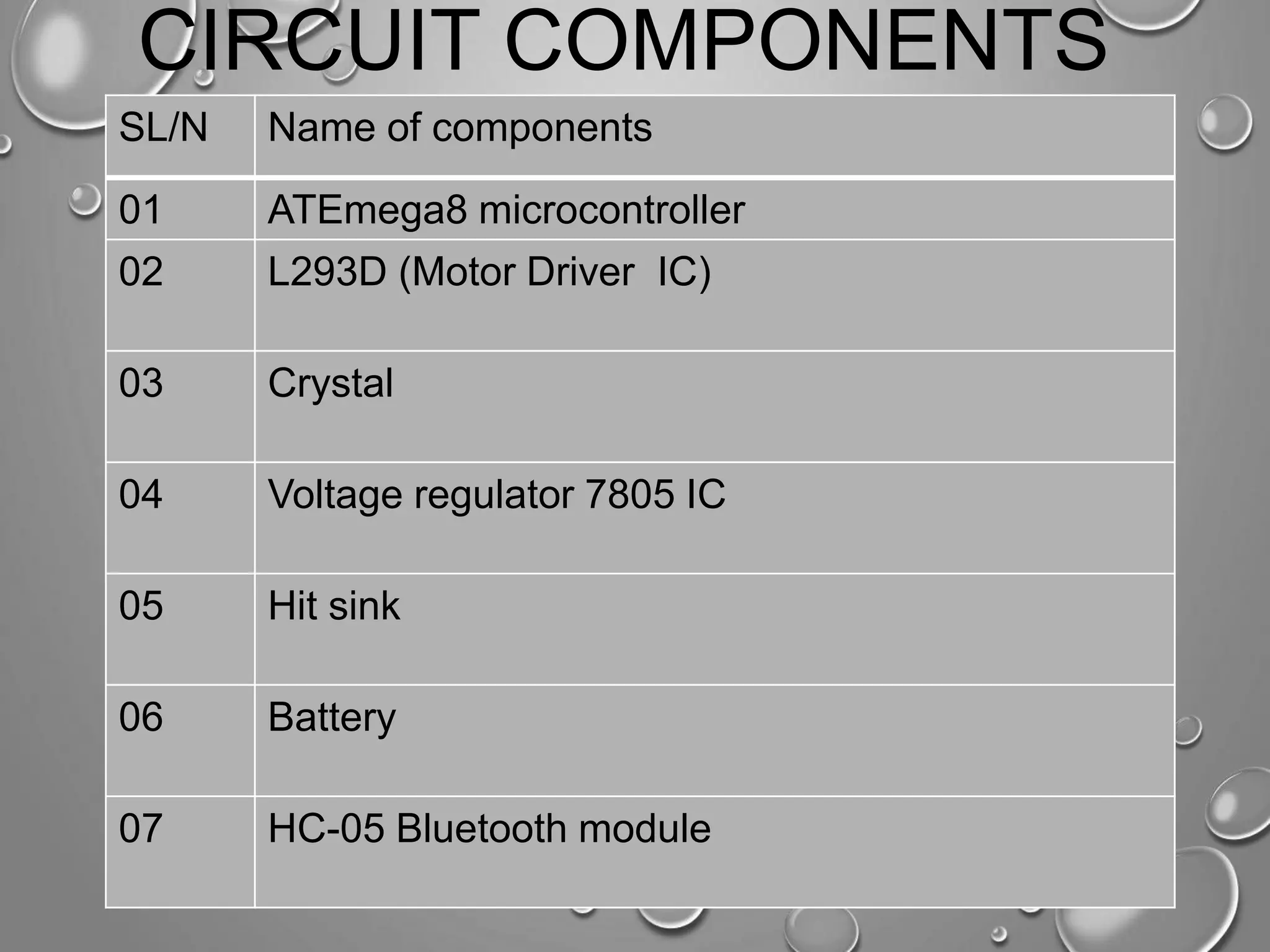
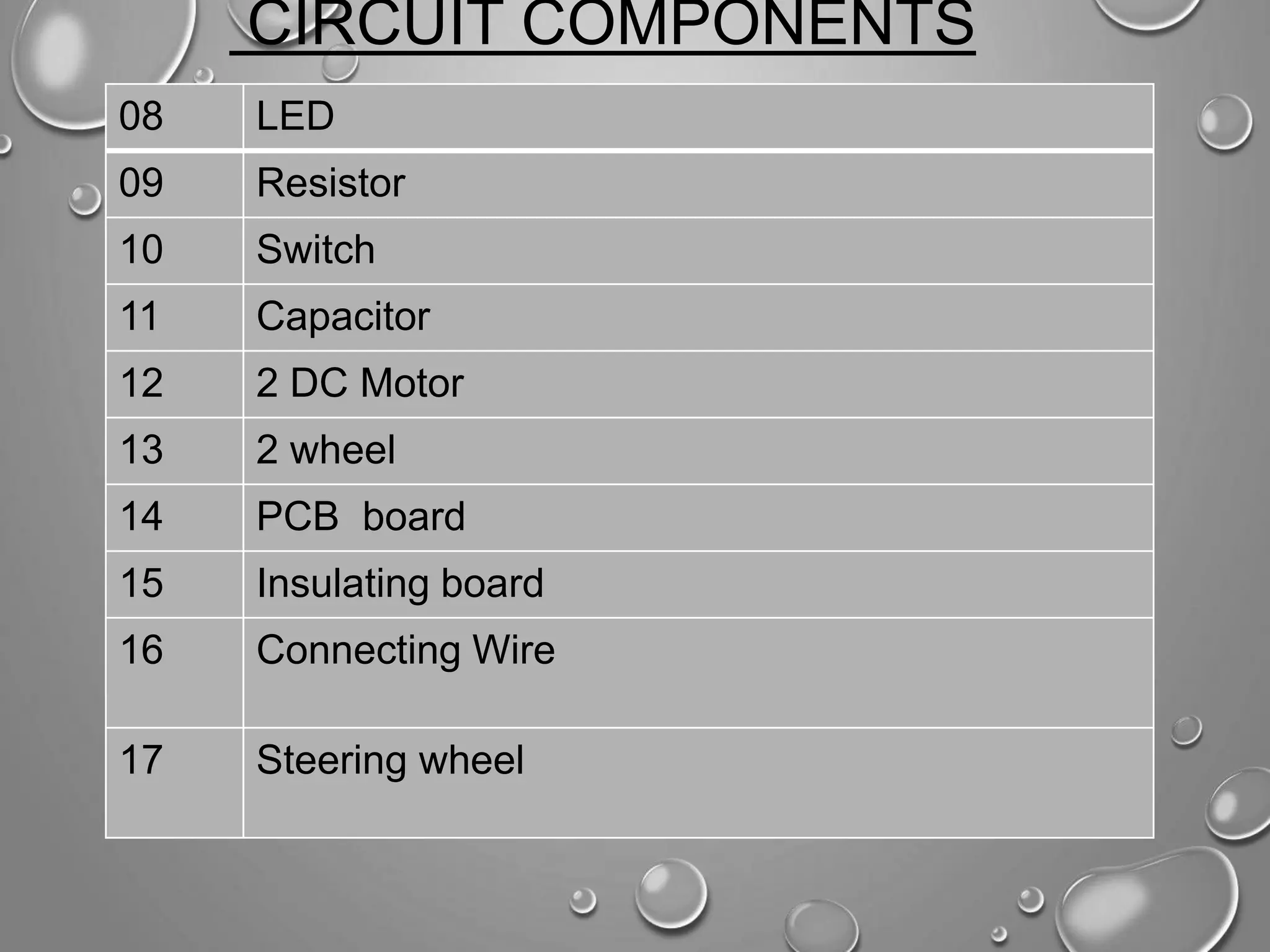
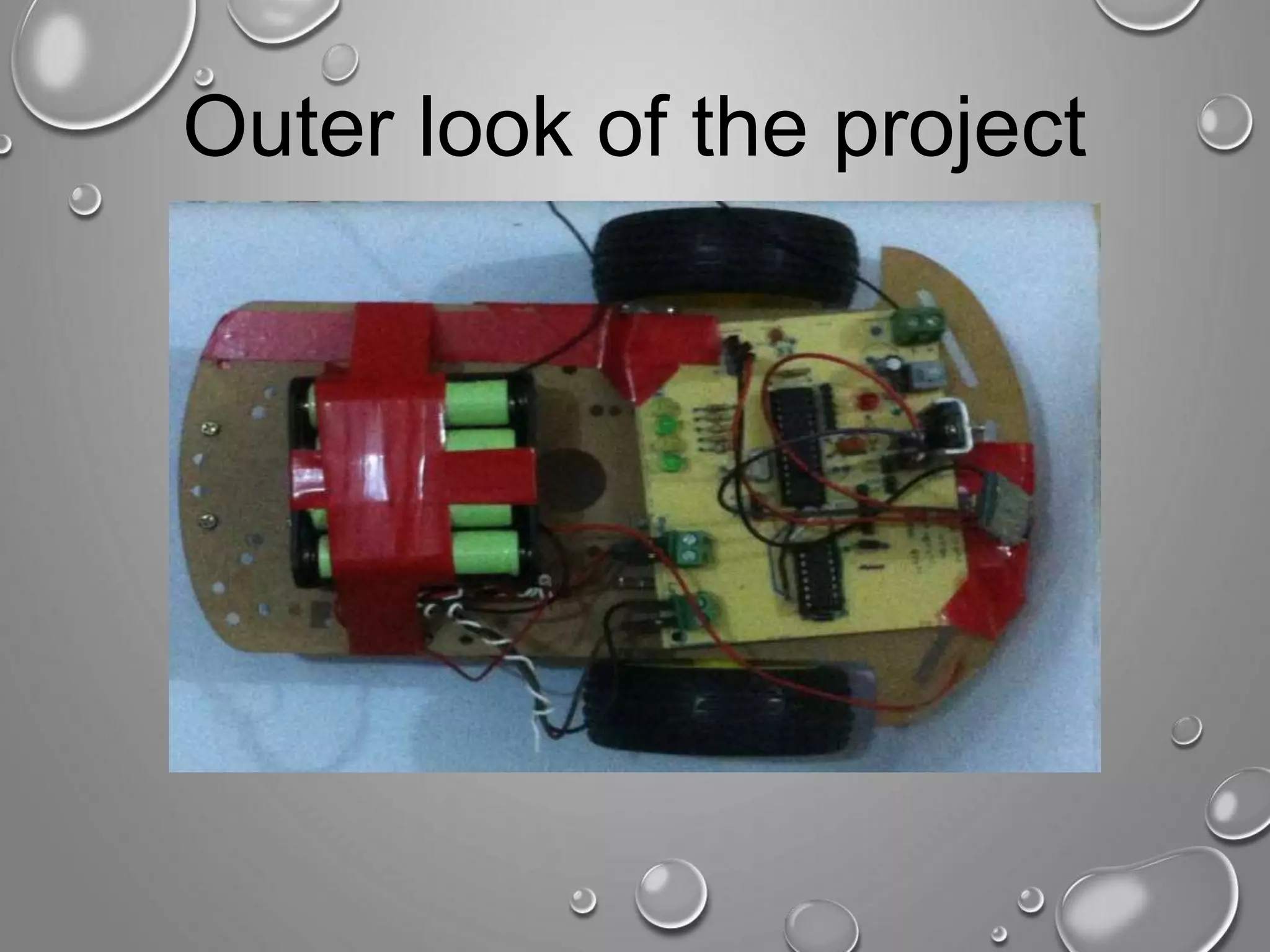
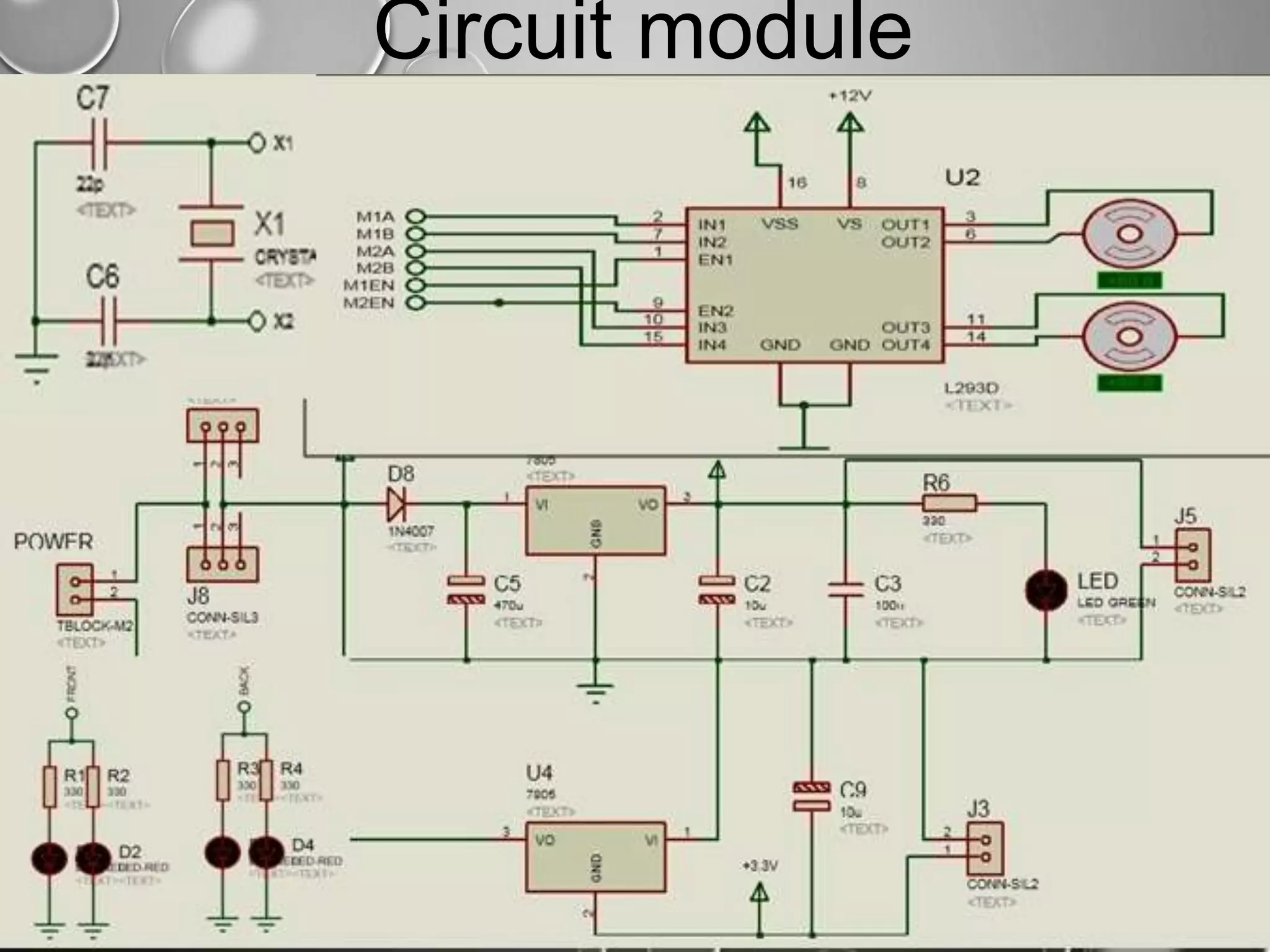
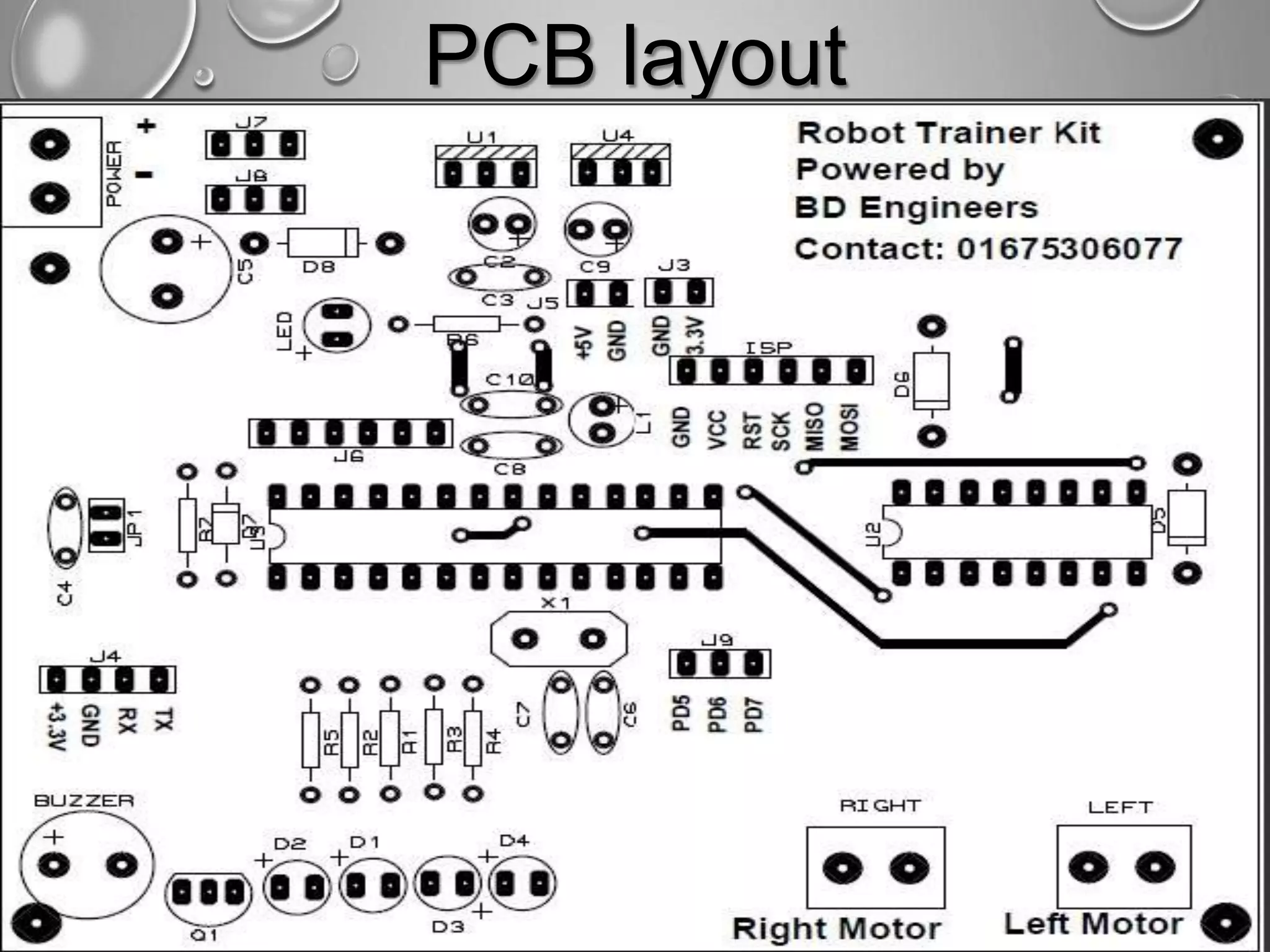




This presentation summarizes an obstacle avoiding robot that is controlled by an Android phone. The robot uses an Atmega8 microcontroller, L293D motor driver, and HC-05 Bluetooth module. An Android app was developed to send movement commands like forward, backward, left, and right to the microcontroller via Bluetooth. The circuit diagram and working of the robot are explained. Future extensions discussed include adding ultrasonic sensors for obstacle avoidance and using cameras for vision.