Download to read offline
![International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 09 Issue: 03 | Mar 2022 www.irjet.net p-ISSN: 2395-0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page 165 Study of Various Edge Detection Techniques and Implementation of Real Time Frame’s Edge Detection Arpita Yadav1, Soni Kushwaha2, Amrita Aman3, Rajnish K Ranjan4 1Computer Science & Engineering Department, University Institute of Technology RGPV Bhopal, Madhya Pradesh, India 2Computer Science & Engineering Department, Oriental College of Technology Bhopal, Madhya Pradesh, India 3Department of Computer Science, Technocrats Institute of Technology, Bhopal, Madhya Pradesh, India 4Lecturer, Govt. Women’s Polytechnic College Bhopal, Madhya Pradesh, India ---------------------------------------------------------------------***---------------------------------------------------------------------- Abstract - This work is done to describe real time video edge detection or image edge detection. In today’s life edge detection becomes an important concern for image processing or for real time video processing. This is important in various fields like in medical field, traffic control systems, in defense applications or in satellite imaging, etc. Edge detection is considered to be one of the most commonly used operation in image processing and video processing. Edge detection is a pre- processing step to raise the standard of the images, and edges in noise- contaminated image. Edge detection technique is used to preserve the edge details of the image by removing unwanted data from the image. In this work, our main motive to identify all possible edges of frames of videos in real time. Apart from this, we have developed an GUI- So user have options to pick any edge detection techniques and will get the edges of an image in real time. For real time images, we have used camera to take input in our implementation. Key Words: Canny; Sobel; Roberts; Prewitt; Laplacian of Gaussian operators; Real time video processing. 1.INTRODUCTION Image processing [1] has become very important and popular area for research. Edge detection is an important part in image processing. It seems everywhere if we want to extract useful information from the image or to discover the characteristics of the image. But images have problems with detecting edges, such as false edge detection, thick or thin edge lines can also arise, missing real edges, problems due to the presence of noise within the image, and so on. So to solve this problem various edge detection techniques are implemented which can perform various operations. For example, if we wish to detect different objects from the images or videos then through image segmentation the objects are separated and we will easily detect objects using edge detection techniques. And the most consequential utilization of edge detection technique is to extract the cognizance regarding the form of the things or object. Edge detection is employed for sundry purposes like to image enhancement, image analysis, texture feature extraction [3, 15], image segmentation, visual perception and so forth. 1.1 Edge An edge might have outlined as a collection of connected pixels that form a boundary between two disjoint regions. Most of the form information of an image is enclosed in edge. 1.2 Edge Detection Edge detection [7, 8] is the basic tool in image processing. especially within the field of feature detection and in feature extraction. Edge detection removes the inessential information from the image while finding structure of the image object and it identifying points in a digital image at which the image brightness changes rapidly. 1.2 Image Processing When we perform an operation on image, then it can be called image processing [4]. Image processing may be a technique that's employed to strengthen an image or extract information from an image. Image processing can be a subset of Computer vision [5]. 2. LITERATURE RIVIEW As, we all know that the edges are the essential features of an image. There are several methods and techniques available to locate the edges of an image. Each technique detects the edges of the image but the standard of output given by these operators are different. So, this paper will explain various types of edge detection techniques and also compare those techniques, which will seek better technique among all. Various edge techniques are given below. 2.1 Robert Edge Detection Operator The Robert Edge Detection Operator [9, 10] is started by Lawrence Robert (1965). Robert's operator is extremely simple and very quick to detect the edge of](https://image.slidesharecdn.com/irjet-v9i330-220915114822-97090f7c/75/Study-of-Various-Edge-Detection-Techniques-and-Implementation-of-Real-Time-Frame-s-Edge-Detection-1-2048.jpg)
![International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 09 Issue: 03 | Mar 2022 www.irjet.net p-ISSN: 2395-0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page 166 image. This operator emphasizes region of high spatial frequency that corresponded to edges. This operator is enriched with couple of 2×2 convolution kernels (Fig- 1). One of the kernel is simple while the other is rotated by 90°. The Robert operator is nearly just like the Sobel operator. But it cannot detect more edges and precise edges than other edge detection operators. Gx Gy Fig-1: Mask used for Robert operator 2.2 Prewitt Edge Detection Operator The Prewitt Edge Detection Operator [9,10] introduced by Judith M. S. Prewitt. Prewitt operator is one among the oldest operator. Prewitt operator is almost identical to Sobel operator, Prewitt operator applying filters (Fig-2) sequentially within the horizontal and vertical direction and combining them together to obtain the final result. Gx Gy Fig-2: Prewitt Operator Mask 2.3 Sobel Edge Detection Operator The Sobel Operator was developed by Irwin Sobel and Gary Feldman. Sobel operator is used in image processing or in computer vision specifically to detect the edges of an image. Sobel operator works by calculating the gradient (i.e. intensity or the color change in an image) of every pixel in image in X (horizontal) and Y (vertical) direction. Sobel Operator makes use of two 3×3 Kernels (Fig-3). And these two kernels are classified with original image (i.e. input image) so that gradient are often estimated. The gradient of each pixel is calculated in both the direction in image using: Gx Gy Fig-3: Horizontal & Vertical Mask Of Sobel Operator 2.4 Laplacian of Gaussian Edge Detection Operator Marr introduces Laplacian operator in (1982). Laplacian of Gaussian operator first applies Gaussian blur and then the Laplacian filter [9, 10]. Gaussian blur filter blurs the image to form the Laplacian to be less much touchy to noise. Because if a Laplacian filter (Fig-4) is applied to a noisy image then Laplacian filter will end result in a picture with many small edges that small edge will distract us from the meaningful edges and beneficial edges. By adding these two kernels we can obtain a Laplacian kernel, 0 0 0 1 - 2 1 0 0 0 Fig-4: Laplacian of Gaussian’s Mask 2.5 Canny Edge Detection Operator John F. Canny (1986) introduces Canny operator [9, 10]. Canny operator is probably the foremost commonly used operator for detecting an edge in an image. The canny operator can be broken into five different phases. Phase 1: Smoothing Smoothing is that the initiative step to detect edges of an image while using a Canny operator. During this phase the noise from the actual image is eliminated by the way of adjusting the distinction and brightness of the image. Phase 2: Calculate the gradient Gradient is a directional transformation within the sharpness of the image. Gradient provide two piece of information direction and magnitude. The direction defines the direction of increase in greatest possible intensity for every pixel and where the magnitude defines the highest power of the edge. The gradient of each pixel is calculated in both the direction in image using. Phase 3: Non-maximum suppression During this phase the thick edges are converted into thin and sharp edges and these edges are further used for object recognition. Even if we have an image with multiple objects, non-maximum suppression is able to select one entity or a object from among several small overlapping objects. Phase 4: Double Threshold The Canny operator considers two boundary values (high limit and low low). The threshold is marked as high limit if the pixels of edge is strong and the threshold marked as low limit if the pixels of edge is weak and if the pixels are between the threshold values than its threshold is depends on its neighboring pixel. Phase 5: Edge detection through hysteresis In this step the strong edges are included in the final output and the weak edges are omitted. But if a weak edge 0 1 -1 0 1 0 0 -1 -1 -1 -1 0 0 0 1 1 1 -1 0 1 -1 0 1 -1 0 1 -1 0 1 -2 0 2 -1 0 1 1 2 1 0 0 0 -1 -2 -1 0 1 0 1 - 4 1 0 1 0 0 1 0 0 -2 0 0 1 0](https://image.slidesharecdn.com/irjet-v9i330-220915114822-97090f7c/75/Study-of-Various-Edge-Detection-Techniques-and-Implementation-of-Real-Time-Frame-s-Edge-Detection-2-2048.jpg)
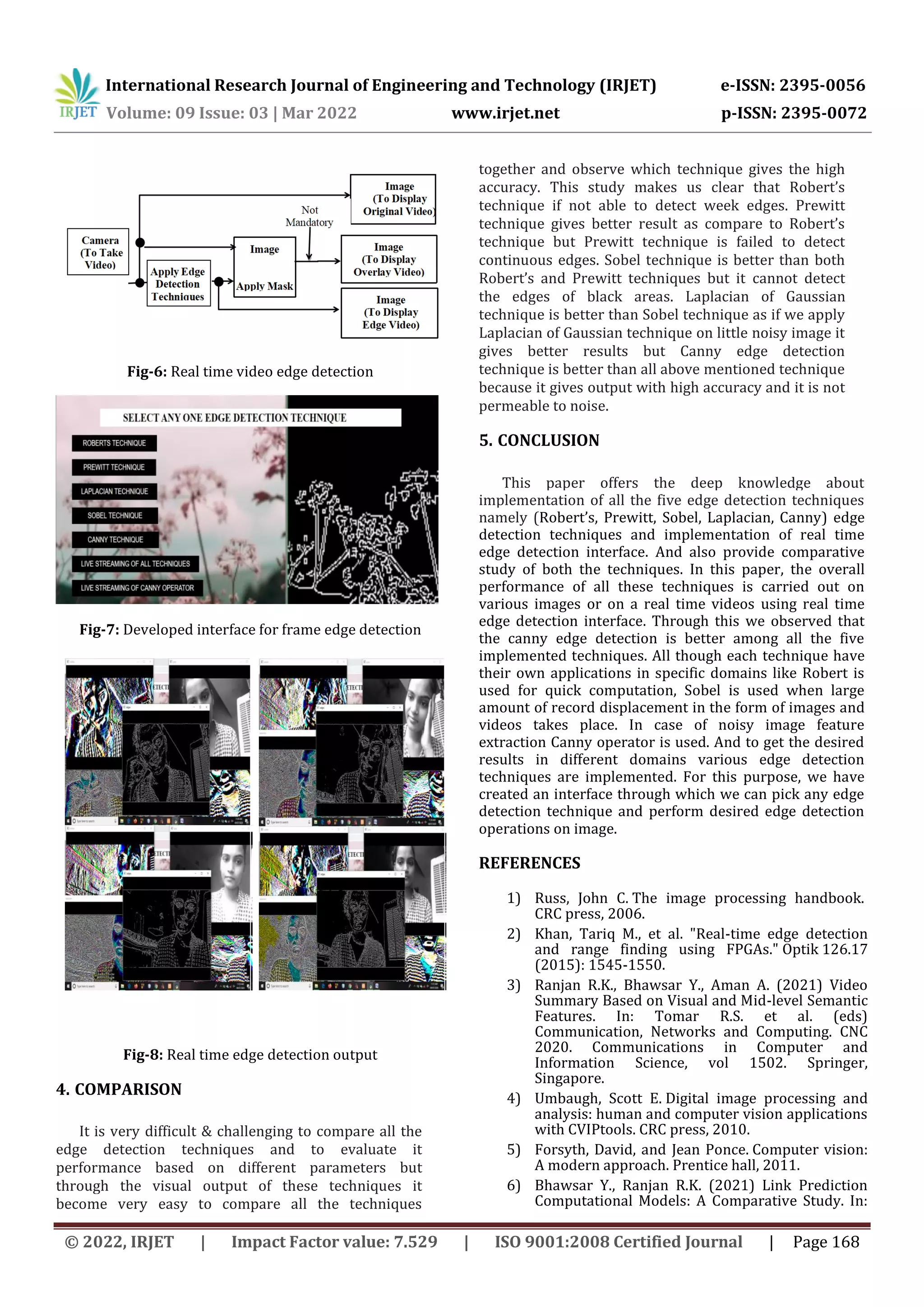
![International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395-0056 Volume: 09 Issue: 03 | Mar 2022 www.irjet.net p-ISSN: 2395-0072 © 2022, IRJET | Impact Factor value: 7.529 | ISO 9001:2008 Certified Journal | Page 167 is associated with a strong edge, it includes in the final output. Flow chart for Canny Operator Chart-1: Flow chart for Canny Operator 3. IMPLEMENTATION & RESULT Implementation of all the edge detection technique have been done. Five edge detection techniques are implemented based on their popularity namely Robert’s, Prewitt, Sobel, Laplacian, Canny edge detection techniques. The performance of all these edge detection techniques by applying these techniques on different images or on real time videos are represented here. We implemented these techniques using Python with OpenCV library which provides fast speed than MATLAB. 3.1 Applying edge detection techniques on different images At the initial step the RGB image is taken and then it is converted into gray scale image in order to reduce the complexity after that the edge detection techniques are applied on these gray scale image. Fig-5: Edge detection outputs 3.2 Applying edge detection techniques on real time video Real time video edge detection [2, 13] is combined with variety of systems like in surveillance system, in traffic monitoring system, in medical field. To conduct this operation high computation power is required. For real time video edge detection camera (external camera or Laptop camera) [14] is required which take videos. Original image Grayscale image Robert’s X direction Robert’s Y direction Robert’s Prewitt X direction Prewitt Y direction Prewitt Sobel X direction Sobel Y direction Sobel Laplacian Of Gaussian Canny Start Read input image8 Smoothing with 5 * 5 Gaussian filter 8 Display the edge detected image Convert RGB image into Gray scale image Gradient calculation is done Non-Maximum suppression Stop Double thresholding Edge detection using hysteresis](https://image.slidesharecdn.com/irjet-v9i330-220915114822-97090f7c/75/Study-of-Various-Edge-Detection-Techniques-and-Implementation-of-Real-Time-Frame-s-Edge-Detection-3-2048.jpg)

This document summarizes and compares various edge detection techniques that can be used for real-time video edge detection. It describes techniques like Robert, Prewitt, Sobel, Laplacian of Gaussian, and Canny edge detectors. These techniques are implemented on images and in a real-time video edge detection interface developed using OpenCV. The techniques are compared based on their ability to detect edges accurately while being robust to noise. Canny edge detection is found to perform the best among the techniques as it provides high accuracy results and is less susceptible to noise. The document thus provides knowledge about various edge detection techniques and their implementation for real-time video edge detection.