The document provides an introduction to Digital Signal Processing (DSP), covering key concepts such as types of signals, their classifications, and the advantages and disadvantages of digital signal processing. It discusses various operations on discrete-time signals, the design and characteristics of systems, and system properties including linearity, stability, and causality. The content serves as foundational knowledge for understanding DSP and its applications in real-world scenarios.


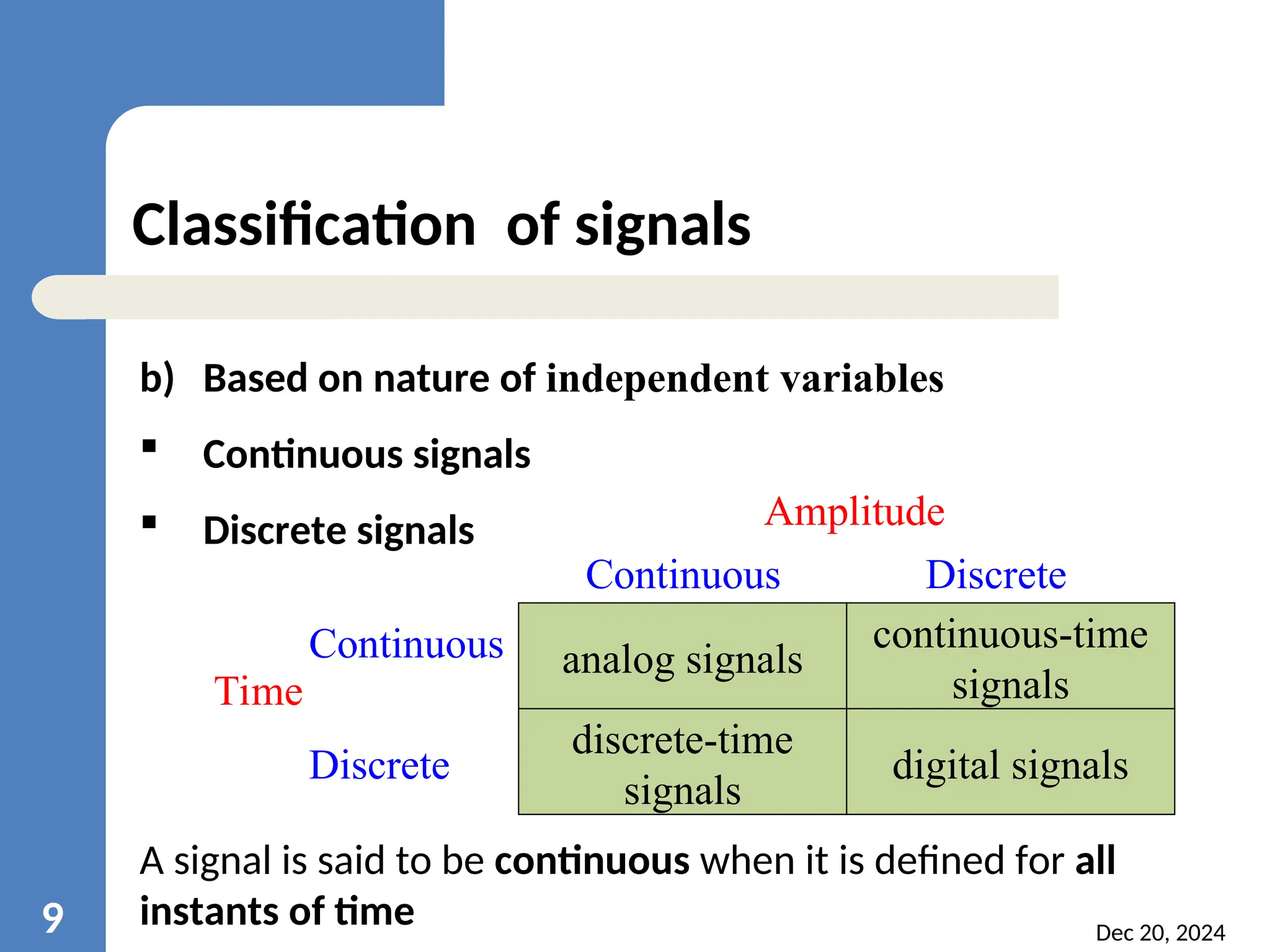
![Dec 20, 2024 6 A continuous-time signal x (t) (discrete-time signal x[n]) is a function of an independent continuous variable t (discrete variable n)](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-6-2048.jpg)























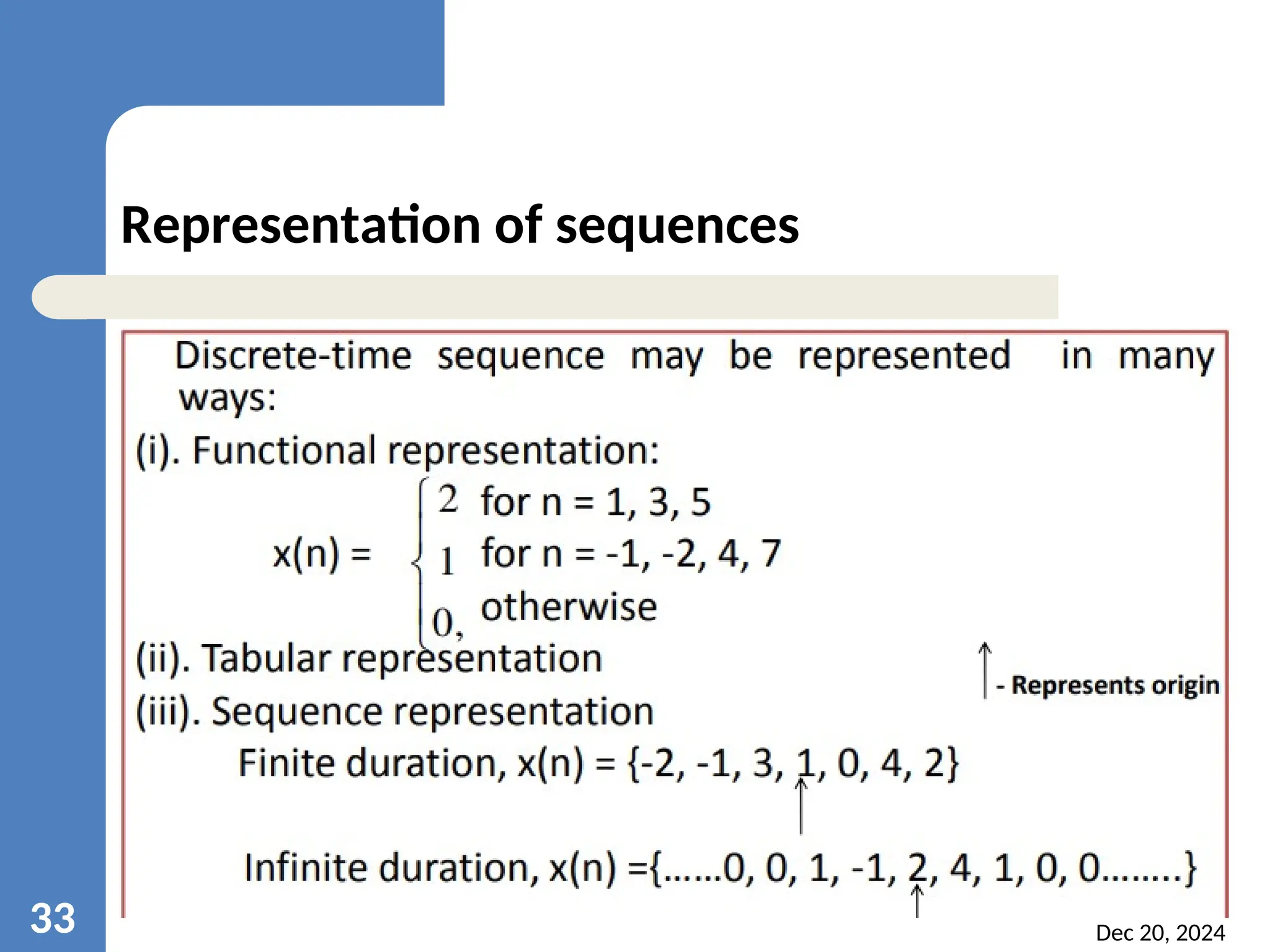
![ Tabular Representation Ggraph Dec 20, 2024 34 1 2 3 4 5 6 7 8 9 10 -1 -2 -3 -4 -5 -6 -7 -8 n x[n]](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-34-2048.jpg)






![Dec 20, 2024 45 3. Power or Energy sequence The energy of a discrete-time signal is defined as The average power of a signal is defined as If E is finite, [0 ≤ E < ] and P = 0 then x(n) is called an energy signal ꝏ The average power of periodic sequence with period N is given by If E is infinite and If P is finite and nonzero, then x[n] is called a power signal.](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-45-2048.jpg)
![Dec 20, 2024 46 P4. Determine the power & energy of the unit step sequence. P5. Test whether the given signal is an energy signal or a power signal. x[n] = 5 (a constant signal)](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-46-2048.jpg)

![Dec 20, 2024 48 3. The product of two signals (A signal Multiplier) 4. Shifting A unit delay element A unit advance element Time shifting y[n] = x[n − k]. k can be positive (delayed signal) or negative (advanced signal)](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-48-2048.jpg)

![Dec 20, 2024 50 5. Folding or reflection or time-reversal y[n] = x[−n]](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-50-2048.jpg)





![Dec 20, 2024 56 A device or an algorithm that performs some prescribed operation on a discrete time signal (input or excitation) to produce another discrete time signal (output or response) Discrete-time system y[n] = T {x[n]} Accumulator system n k k x n y ) ( ) ( Ideal Delay System ) ( ) ( d n n x n y Squarer 2 ] [ ) ( n x n y Compressor ] [ ) ( Mn x n y Examples T [ ] x[n] y[n] = T [ x[n] ]](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-56-2048.jpg)

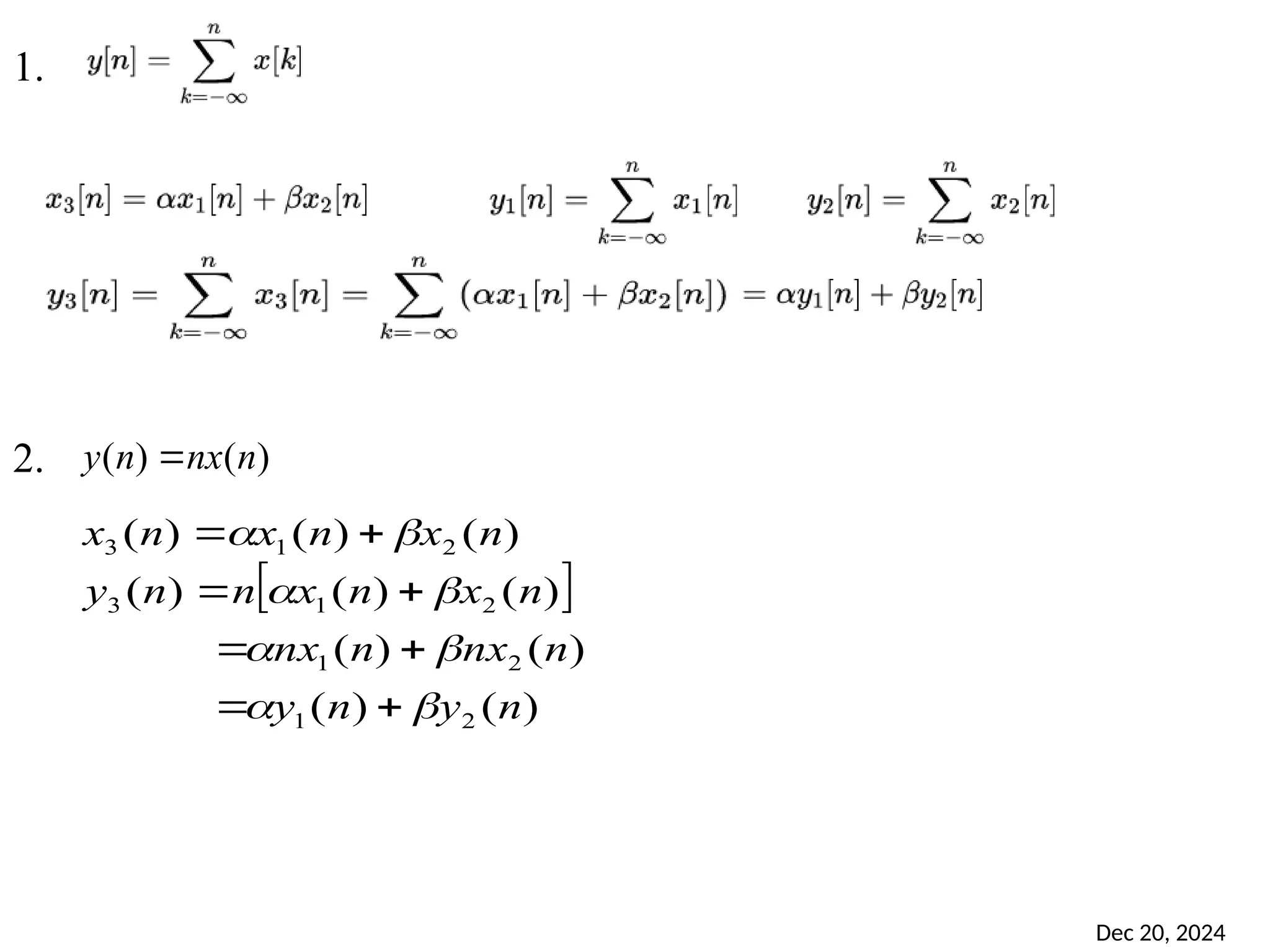
![Dec 20, 2024 59 1. Linear & non-linear systems System is said to be linear if it obeys superposition principle 1. Homogeneity or scaling property 2. Additivity property These two properties together comprise the principle of superposition T {a x[n] } = a T{ x[n] } If a = 0 we see that zero input signal implies zero output signal for a linear system T { x1 [n] + x2 [n] } = T { x1 [n] } + T { x2 [n] }](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-59-2048.jpg)
![Dec 20, 2024 60 A system T is linear iff T { α x1[n] + β x2[n] } = α T { x1[n] } + β T { x2[n] } x3[n] = α x1[n] + β x2[n] = T { x3[n] } α α β β T T T](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-60-2048.jpg)




![Dec 20, 2024 67 3. Static & Dynamic systems For a Static system or Memory less system, the output y[n] depends only on the current input x[n], not on previous (n-1) or future (n+1) inputs . Output depends on past, present & future samples of I/P - Dynamic (with memory) Ex](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-67-2048.jpg)
![Dec 20, 2024 68 4. Causal & NonCausal systems For a Causal system, the output y[n] at any time n depends only on the “ present ” and “ past ” inputs i.e., y(n) = x(n)+u(n+1) Non causal system – The system does not satisfy the above condition. y(n) = x(-n) y(n) = x(2n) For n < n0 ; i.e., n=1, n0=4 y(n) = ax(n)+b Ex Ex](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-68-2048.jpg)
![Dec 20, 2024 69 5. Stable & unstable systems A system is Bounded-Input Bounded-Output (BIBO) stable iff every bounded input produces a bounded output If ∃ Mx s.t. | x[n] | ≤ Mx < ∞ n, then there must exist an ∀ My s.t. | y[n] | ≤ My < ∞ n ∀ unstable k n x n y stable k n x m n y unstable n n x n y k n k 0 1 0 2 ) ( ) ( ) ( 1 ) ( ) ( ) ( Ex](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-69-2048.jpg)
![Dec 20, 2024 70 Analysis of Linear Time Invariant systems Why analysis? So far we only have input-output relationships. For a given system can compute y[n] for selected x[n]’s , but very difficult to design filters etc LTI h (n)](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-70-2048.jpg)
![Dec 20, 2024 71 Decompose input signal x[n] into a weighted sum of elementary Two particularly good choices for the elementary functions • impulse functions δ [n − k] • complex exponentials Determine response of system to each elementary Apply superposition property: Techniques for the analysis of linear systems](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-71-2048.jpg)
![Dec 20, 2024 72 Resolution of discrete-time signal into impulses This is the sifting property of the unit impulse function x(n) = {0.5, 1.5, 0, -1, 1, 0.75, 2} x(n) = 0.5 δ(n+2)+1.5 δ(n+1)-δ(n-1)+δ(n-2)+0.75 δ(n-3)+2 δ(n-4) T [ ] (n) h(n) x(n) y(n) Impulse Response](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-72-2048.jpg)
![Dec 20, 2024 73 Let the symbol h[n-k] to denote the system output when the input is δ[n − k] , i.e., Because the system is Time Invariant system Response of LTI systems to arbitrary inputs: The Convolution Sum T [ ] x(n) y(n) = T [x(n)] ) ( ) ( ) ( k n k x n x k ) ( ) ( ) ( k n k x T n y k ) ( )] ( [ k n h k n T ](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-73-2048.jpg)
![Dec 20, 2024 74 )] ( [ ) ( ) ( k n T k x n y k ) ( ) ( k n h k x k Delayed Impulse as input Delayed Impulse Response ) ( ) ( ) ( k n k x T n y k ) ( * ) ( n h n x convolution The convolution sum shows that with the impulse response h[n], you can compute the output y[n] for any input signal x[n] . Thus A LTI system is characterized completely by its impulse response h[n]](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-74-2048.jpg)
![Dec 20, 2024 75 Properties of Convolution ) ( * ) ( ) ( ) ( ) ( n h n x k n h k x n y k ) ( * ) ( ) ( ) ( ) ( n x n h k n x k h n y k Convolution is Commutative ) ( * ) ( ) ( * ) ( n x n h n h n x If x[n] has n = N1, . . . , N1 + L1 − 1 (length L1) and h[n] has n = N2, . . . , N2 + L2 − 1 (length L2) then y[n] = x[n] h[n] has L = L1 + L2 − 1 ∗](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-75-2048.jpg)

![1. Given x[n] and h[n], choose an initial value of n, the starting time for evaluating the output sequence y[n]. If x[n] starts at n = n1 and h[n] starts at n = n2 then n = n1+n2 is a good choice. 2. Express both the sequences in terms of the index k to get h[k] and x[k]. 3. Tilt h[k] about k=0 to obtain h[-k] and shift by n to the right if n is positive and left if n is negative to obtain h[n- k]. Dec 20, 2024 77 Convolution Process steps ) ( ) ( ) ( k n h k x n y k ](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-77-2048.jpg)
![4. Multiply the two sequences x[k] and h[n-k] element by element and sum the products to get y[n]. 5. Increment the index n, shift the sequence h[n-k] from left to right by one sample and repeat step-4. 6. Repeat step-5 until the sum of products is zero for all remaining values of n. Dec 20, 2024 78 Convolution Process steps ) ( ) ( ) ( k n h k x n y k ](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-78-2048.jpg)
![Dec 20, 2024 79 Example.1 ]. [ * ] [ ] [ } 2 , 1 , 2 , 1 { ] [ } 2 , 1 , 2 , 3 { ) ( n h n x n y find n h and n x Given ] [n h y(n)=? 0 1 2 3 4 5 6 n 0 1 2 3 4 5 6 n -1 3 2 1 2 1 1 2 2](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-79-2048.jpg)
![Dec 20, 2024 80 Example.1 n1= 0, n2= -1 n = n1+n2= -1 0 1 2 3 4 5 6 k x[k] -1 0 1 2 3 4 5 k h[k] 1 2 3 4 5 6 7 k h[-k] 0 -2 -1 } 2 , 1 , 2 , 1 { ] [ } 2 , 1 , 2 , 3 { ) ( n h and n x 3 1 . 3 ) 1 ( ) ( ) 1 ( k h k x y k 1 2 3 4 5 6 7 k h[-1-k] 0 -2 -1 -3 ) ( ) ( ) ( k n h k x n y k 3 2 1 2 1 1 2 2 1 1 2 2 2 1 1 2](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-80-2048.jpg)
![Dec 20, 2024 81 Example.1 0 1 2 3 4 5 6 k x[k] -1 0 1 2 3 4 5 k h[k] 1 2 3 4 5 6 7 k h[-k] 0 -2 -1 8 2 6 1 . 2 2 . 3 ) ( ) ( ) 0 ( k h k x y k ) ( ) ( ) ( k n h k x n y k 3 2 1 2 1 1 2 2 n = -1+1=0 2 1 1 2 } 2 , 1 , 2 , 1 { ] [ } 2 , 1 , 2 , 3 { ) ( n h and n x](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-81-2048.jpg)
![Dec 20, 2024 82 Example.1 0 1 2 3 4 5 6 k x[k] -1 0 1 2 3 4 5 k h[k] 1 2 3 4 5 6 7 k h[1-k] 0 -2 -1 8 1 . 1 2 . 2 1 . 3 ) 1 ( ) ( ) 1 ( k h k x y k ) ( ) ( ) ( k n h k x n y k n = 0+1=1 1 2 3 4 5 6 7 k h[-k] 0 -2 -1 2 1 1 2 3 2 1 2 1 1 2 2 2 1 1 2 } 2 , 1 , 2 , 1 { ] [ } 2 , 1 , 2 , 3 { ) ( n h and n x](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-82-2048.jpg)
![Dec 20, 2024 83 Example.1 0 1 2 3 4 5 6 k x[k] -1 0 1 2 3 4 5 k h[k] 1 2 3 4 5 6 7 k h[2-k] 0 -2 -1 12 1 . 2 2 . 1 1 . 2 2 . 3 ) 2 ( ) ( ) 2 ( k h k x y k 3 2 1 2 1 1 2 2 1 2 3 4 5 6 7 k h[-k] 0 -2 -1 2 1 1 2 2 1 1 2 ) ( ) ( ) ( k n h k x n y k n = 1+1=2 } 2 , 1 , 2 , 1 { ] [ } 2 , 1 , 2 , 3 { ) ( n h and n x](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-83-2048.jpg)
![Dec 20, 2024 84 Example.1 0 1 2 3 4 5 6 k x[k] -1 0 1 2 3 4 5 k h[k] h[3-k] 1 2 3 4 5 6 7 k 0 -2 -1 9 2 . 2 1 . 1 2 . 2 ) 3 ( ) ( ) 3 ( k h k x y k 3 2 1 2 1 1 2 2 1 2 3 4 5 6 7 k h[-k] 0 -2 -1 2 1 1 2 2 1 1 2 ) ( ) ( ) ( k n h k x n y k n = 2+1=3 } 2 , 1 , 2 , 1 { ] [ } 2 , 1 , 2 , 3 { ) ( n h and n x](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-84-2048.jpg)
![Dec 20, 2024 85 Example.1 0 1 2 3 4 5 6 k x[k] -1 0 1 2 3 4 5 k h[k] h[4-k] 1 2 3 4 5 6 7 k 0 -2 -1 4 1 . 2 2 . 1 ) 4 ( ) ( ) 4 ( k h k x y k 3 2 1 2 1 1 2 2 1 2 3 4 5 6 7 k h[-k] 0 -2 -1 2 1 1 2 2 1 1 2 ) ( ) ( ) ( k n h k x n y k n = 3+1=4 } 2 , 1 , 2 , 1 { ] [ } 2 , 1 , 2 , 3 { ) ( n h and n x](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-85-2048.jpg)
![Dec 20, 2024 86 Example.1 0 1 2 3 4 5 6 k x[k] -1 0 1 2 3 4 5 k h[k] h[5-k] 1 2 3 4 5 6 7 k 0 -2 -1 4 2 . 2 ) 5 ( ) ( ) 5 ( k h k x y k 3 2 1 2 1 1 2 2 1 2 3 4 5 6 7 k h[-k] 0 -2 -1 2 1 1 2 2 1 1 2 ) ( ) ( ) ( k n h k x n y k n = 4+1=5 n1= 3, n2= 2 n = n1+n2= 5 } 2 , 1 , 2 , 1 { ] [ } 2 , 1 , 2 , 3 { ) ( n h and n x](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-86-2048.jpg)
![Dec 20, 2024 87 Example.1 0 1 2 3 4 5 6 n y[n ] -1 ) ( ) ( ) ( k n h k x n y k } 2 , 1 , 2 , 1 { ] [ } 2 , 1 , 2 , 3 { ) ( n h and n x 3 8 8 12 9 4 4 } 4 , 4 , 9 , 12 , 8 , 8 , 3 { ) ( n y](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-87-2048.jpg)

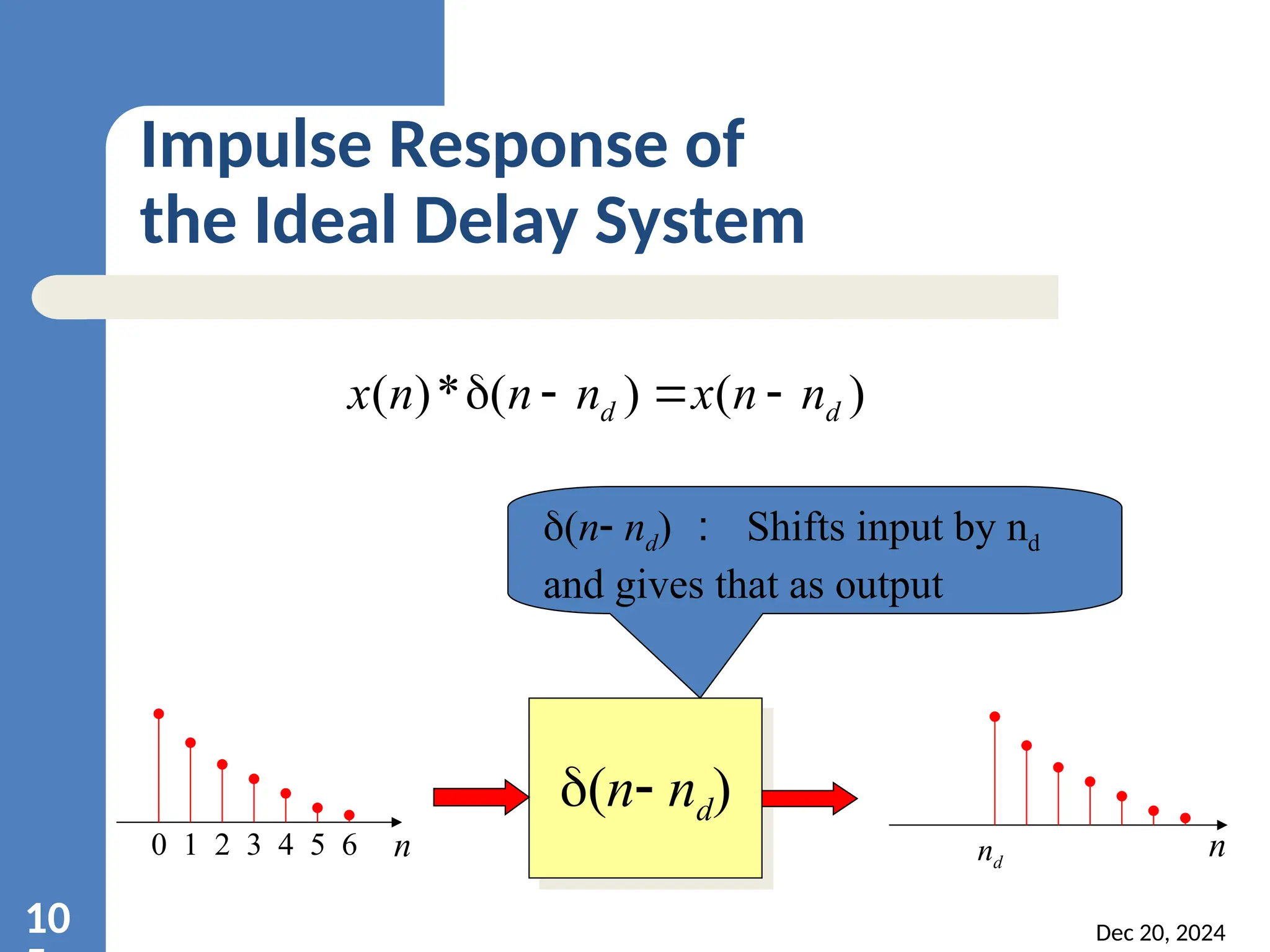
![Dec 20, 2024 93 Example: Ideal Delay System ) ( ) ( d n n x n y Accumulator n k k x n y ) ( ) ( Moving Average 2 1 ) ( 1 1 ) ( 2 1 M M k k n x M M n y T [ ] x(n ) y(n)=T[x(n) ] Check the following systems for stability and causality](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-93-2048.jpg)
![Dec 20, 2024 94 Example: Squarer 2 ] [ ) ( n x n y Forward difference ] [ ] 1 [ ) ( n x n x n y Compressor eger ve is M n Mn x n y int , ], [ ) ( T [ ] x(n ) y(n)=T[x(n) ] Check the following systems for stability and causality Backward difference ] 1 [ ] [ ) ( n x n x n y](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-94-2048.jpg)
![Solution Select x1[n]=x2[n] for n≤k x1[n]≠x2[n] for n>k Find T{x1[n]}=x1[n-nd] and T{x2[n]}=x2[n-nd] At n=k T{x1[n]}= T{x2[n]} if nd is positive So system is causal for nd≥0 System is noncausal for nd<0 If x[n]<∞ .i.e. M, bounded input y[n] also bounded . So system is stable. Dec 20, 2024 95 Ideal Delay System ) ( ) ( d n n x n y ](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-95-2048.jpg)
![Solution Select x1[n]=x2[n] for n≤k x1[n]≠x2[n] for n>k T{x1[n]}= and T{x2[n]}= T{x1[n]}= T{x2[n]} if M1≤0 and M2>-M1 Then the system is causal otherwise the system is noncausal Dec 20, 2024 96 Moving Average system 2 1 ) ( 1 1 ) ( 2 1 M M k k n x M M n y 2 1 ) ( 1 1 1 2 1 M M k k n x M M 2 1 ) ( 1 1 2 2 1 M M k k n x M M](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-96-2048.jpg)
![Solutions If x[n]<∞ .i.e. M bounded input then output y[n] also bounded. So the system is stable. Dec 20, 2024 97 Moving Average 2 1 ) ( 1 1 ) ( 2 1 M M k k n x M M n y M M M M M M M M M n y then M n x If M M k 2 1 1 ) 1 ( 1 1 ] [ ] [ 2 1 2 1 2 1](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-97-2048.jpg)







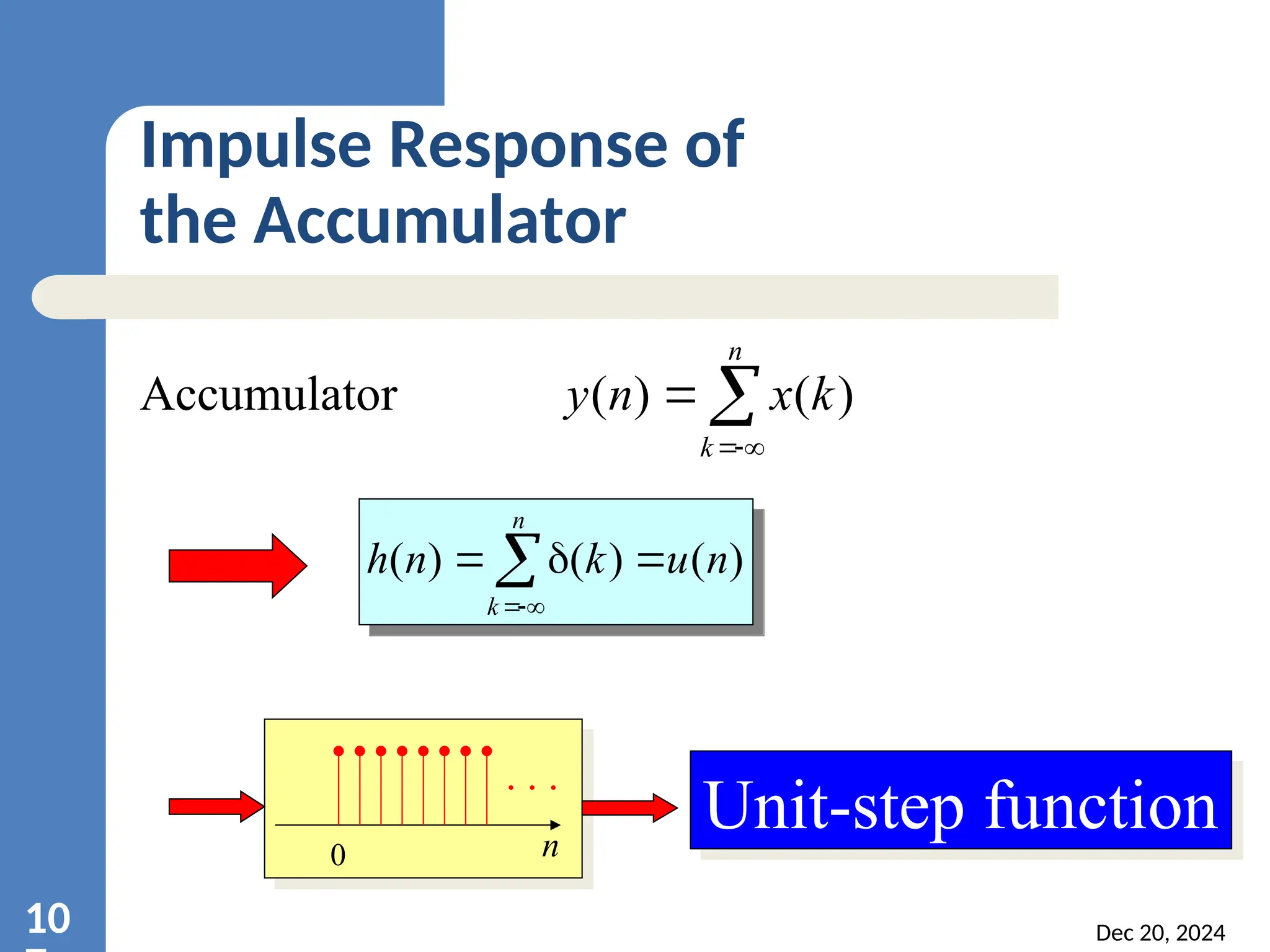
![Solutions Select x1[n]=x2[n] for n≤k x1[n]≠x2[n] for n>k T{x1[n]}= and T{x2[n]}= T{x1[n]}= T{x2[n]} so the system is causal. So the system is unstable. Dec 20, 2024 10 Accumulator n k k x n y ) ( ) ( n k k x ) ( 1 n k k x ) ( 2 n k M n y then M n x If ] [ ] [](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-108-2048.jpg)







![Dec 20, 2024 11 Example: The Ideal Delay System d n j j e e H ) ( ) cos( ) ( 0 n A n x n j j n j j e e A e e A n x 0 0 2 2 ) ( d d n j n j j n j n j j e e e A e e e A n y 0 0 0 0 2 2 ) ( ) ( ) ( 0 0 2 2 d d n n j j n n j j e e A e e A ] ) ( cos[ ) ( 0 d n n A n y](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-118-2048.jpg)
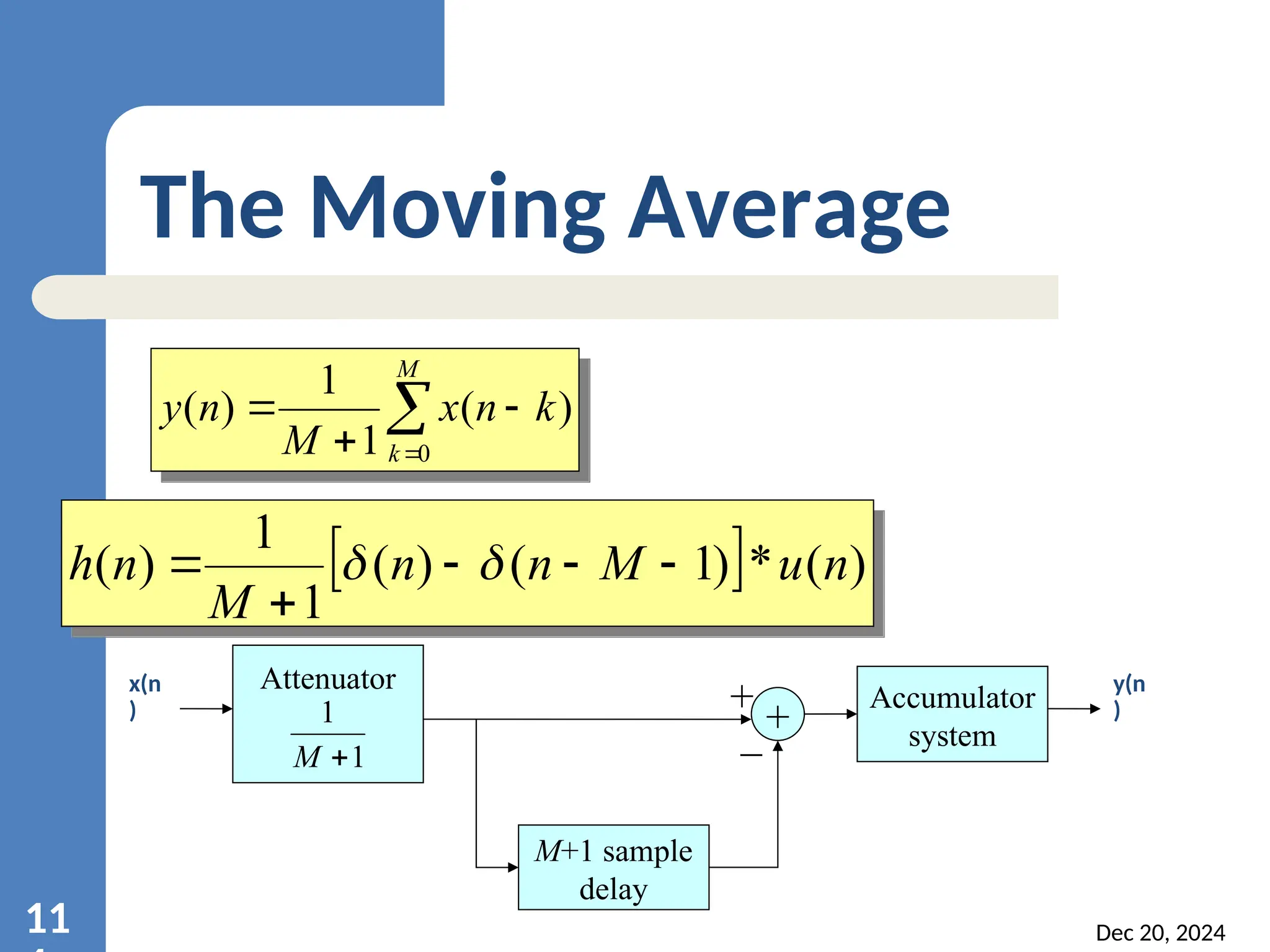
![Dec 20, 2024 12 Moving Average M k k n x M n y 0 ) ( 1 1 ) ( M k k n M n h 0 ) ( 1 1 ) ( k jk j e k h e H ) ( ) ( h(n) 0 0 M M k jk e M 0 1 1 j M j e e M 1 1 1 1 ) 1 ( ) ( ) ( 1 1 2 / 2 / 2 / 2 / ) 1 ( 2 / ) 1 ( 2 / ) 1 ( j j j M j M j M j e e e e e e M ) ( ) ( 1 1 2 / 2 / 2 / ) 1 ( 2 / ) 1 ( 2 / j j M j M j M j e e e e e M ) 2 / sin( ] 2 / ) 1 ( sin[ 1 1 2 / M e M M j n n](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-120-2048.jpg)
![Dec 20, 2024 12 Moving Average ) 2 / sin( ] 2 / ) 1 ( sin[ 1 1 ) ( 2 / M e M e H M j j ) 2 / sin( ] 2 / ) 1 ( sin[ 1 1 | ) ( | M M e H j](https://image.slidesharecdn.com/dsp-units-241220120835-2cc433ae/75/introduction-to-digital-signal-processing-121-2048.jpg)