Download as PDF, PPTX



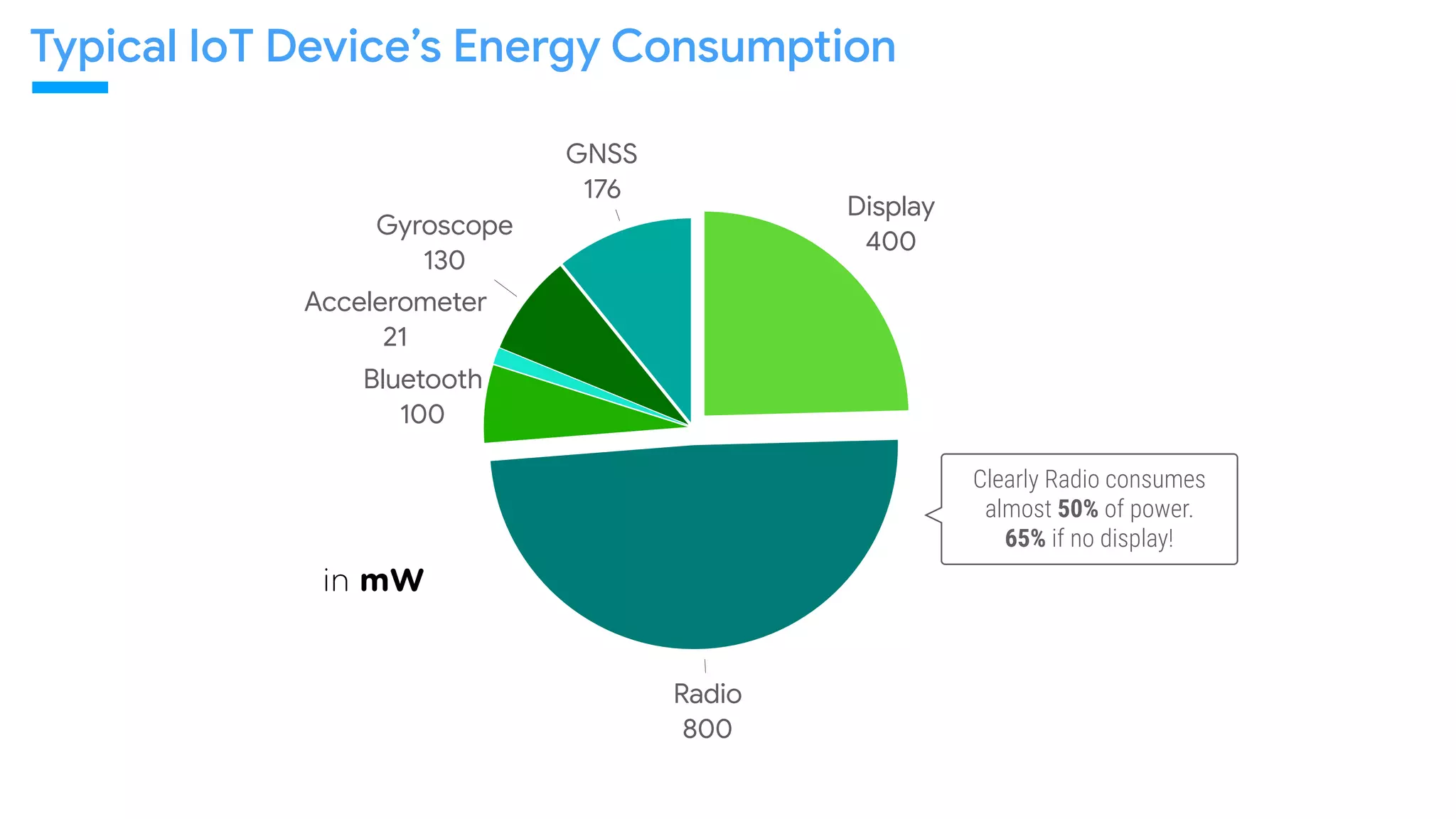
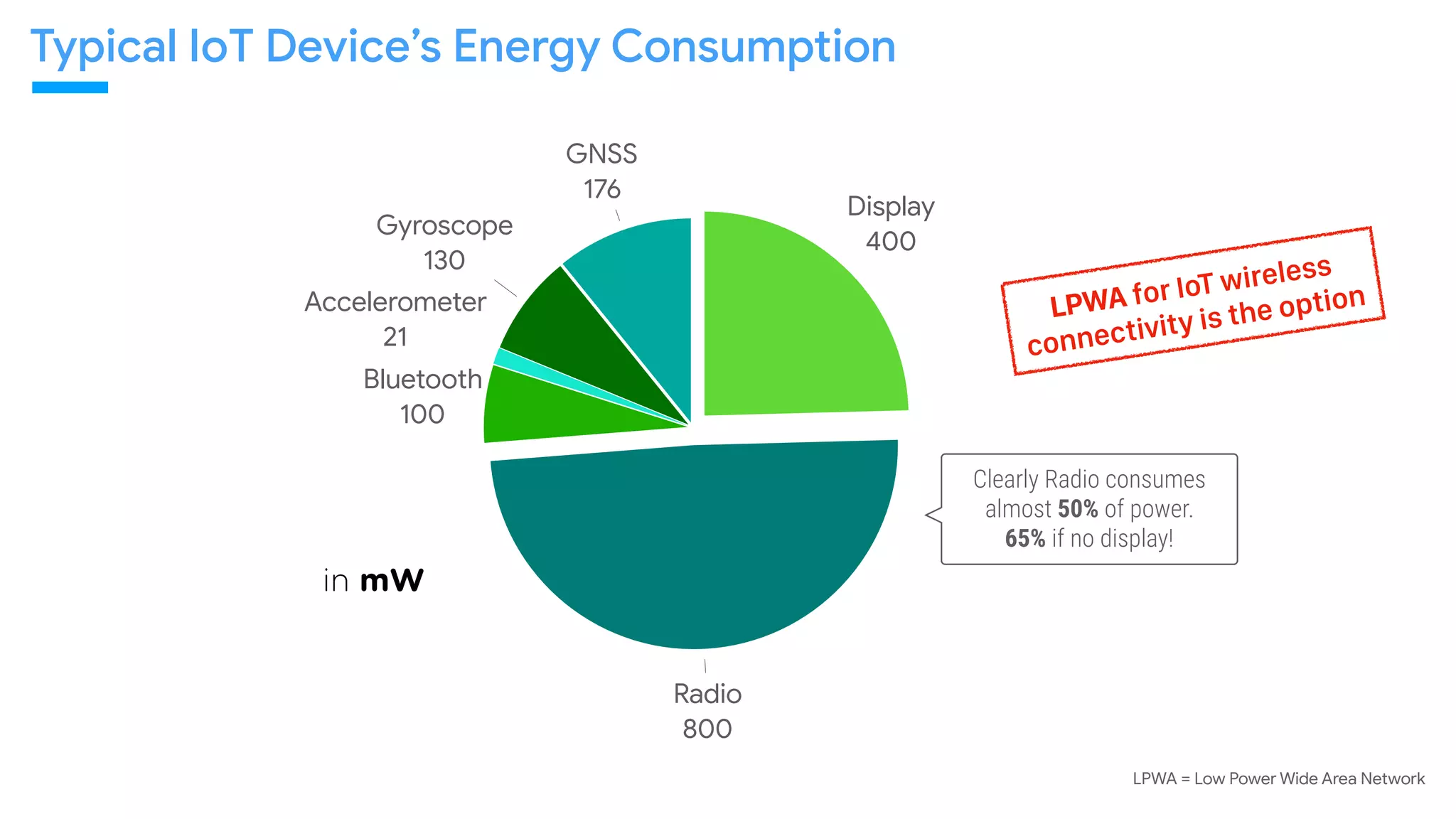

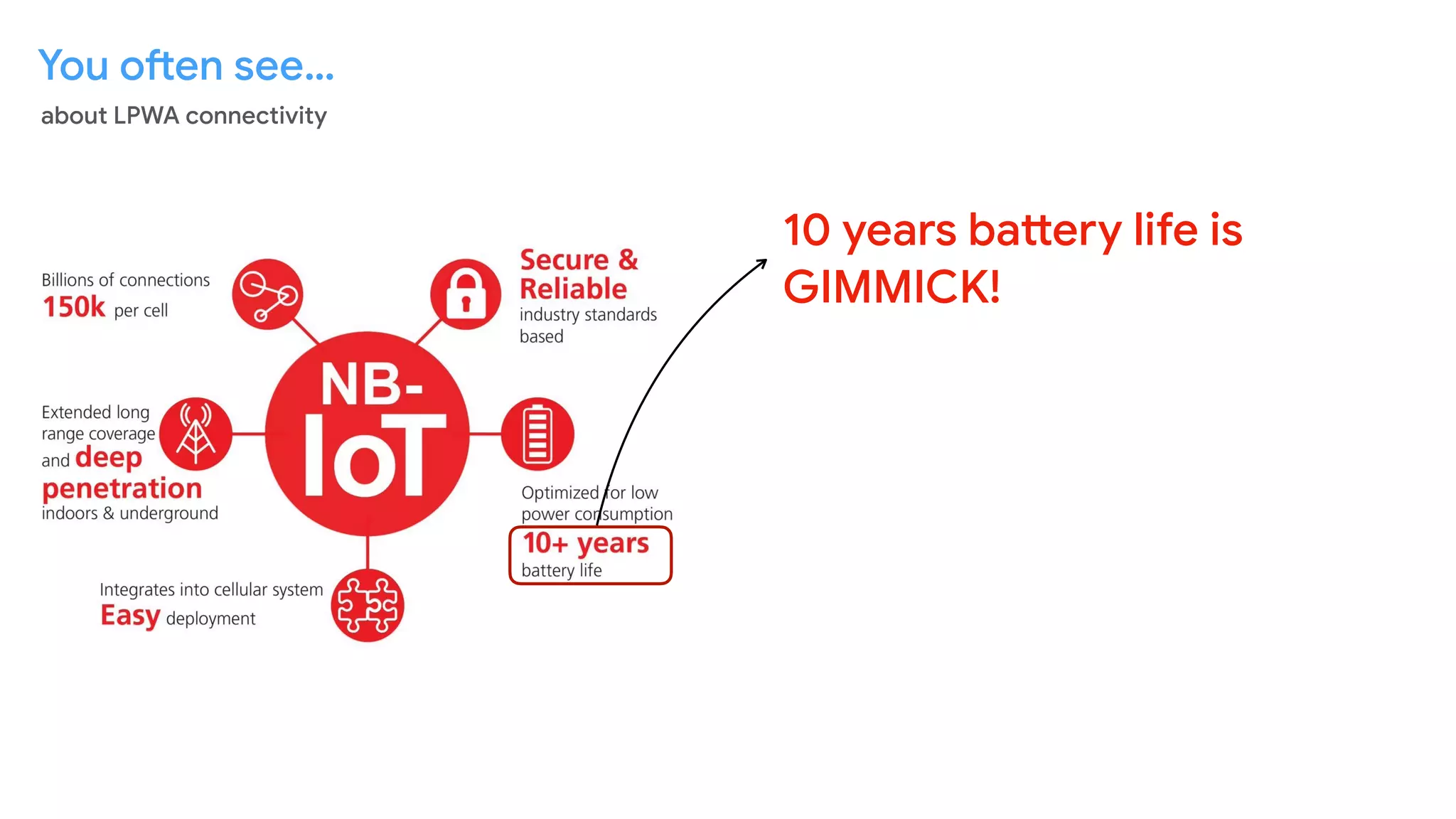





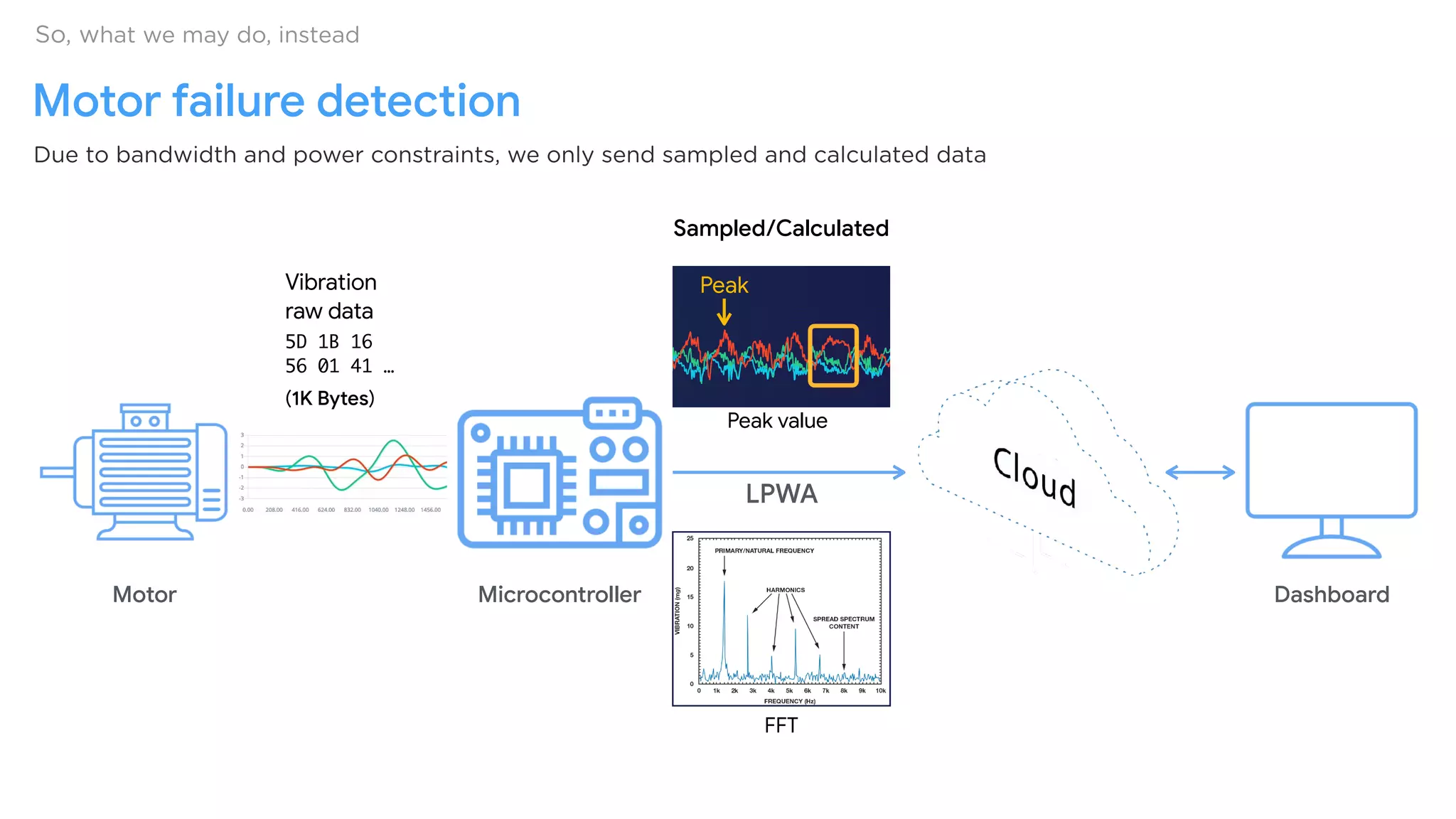
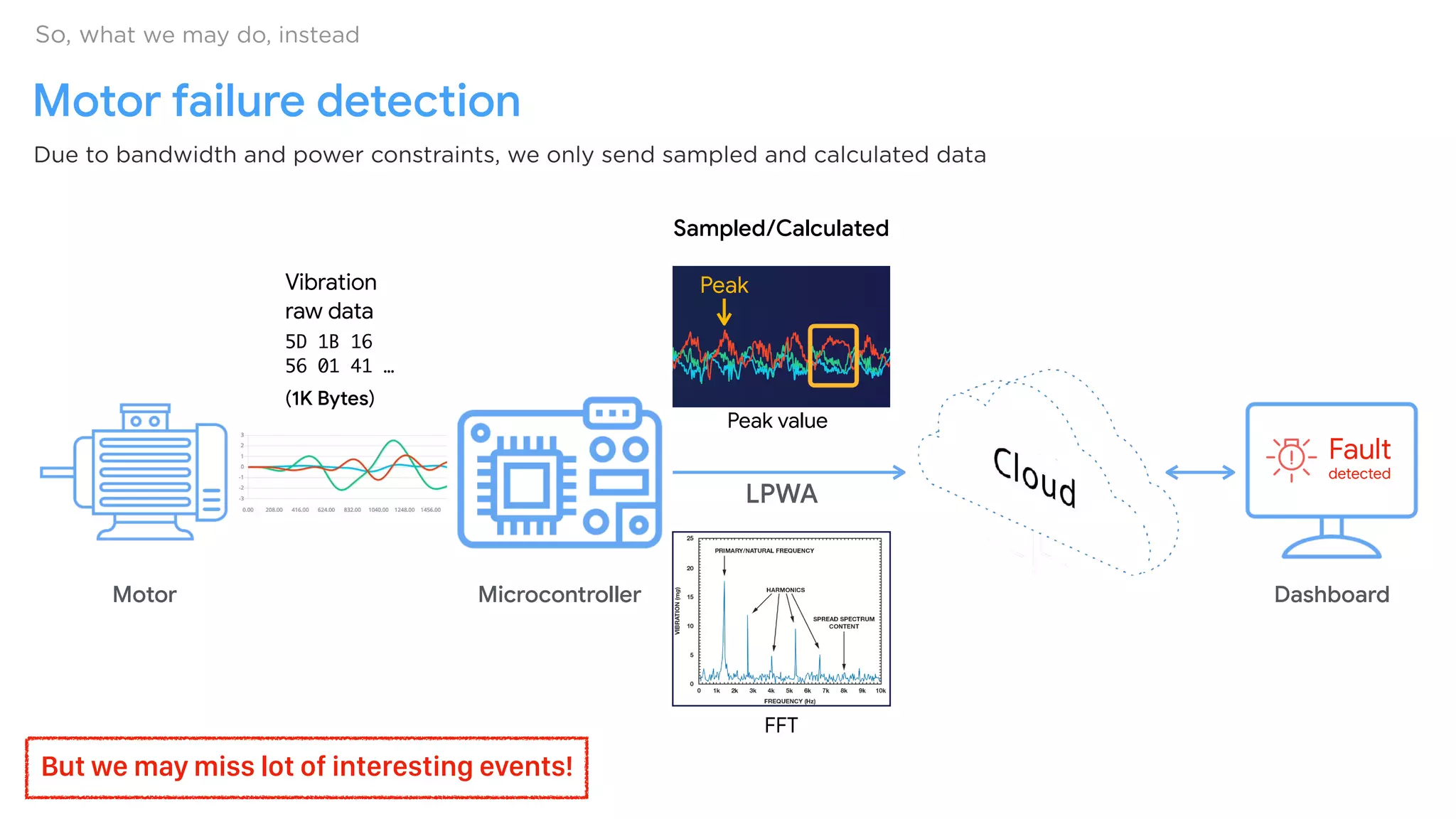
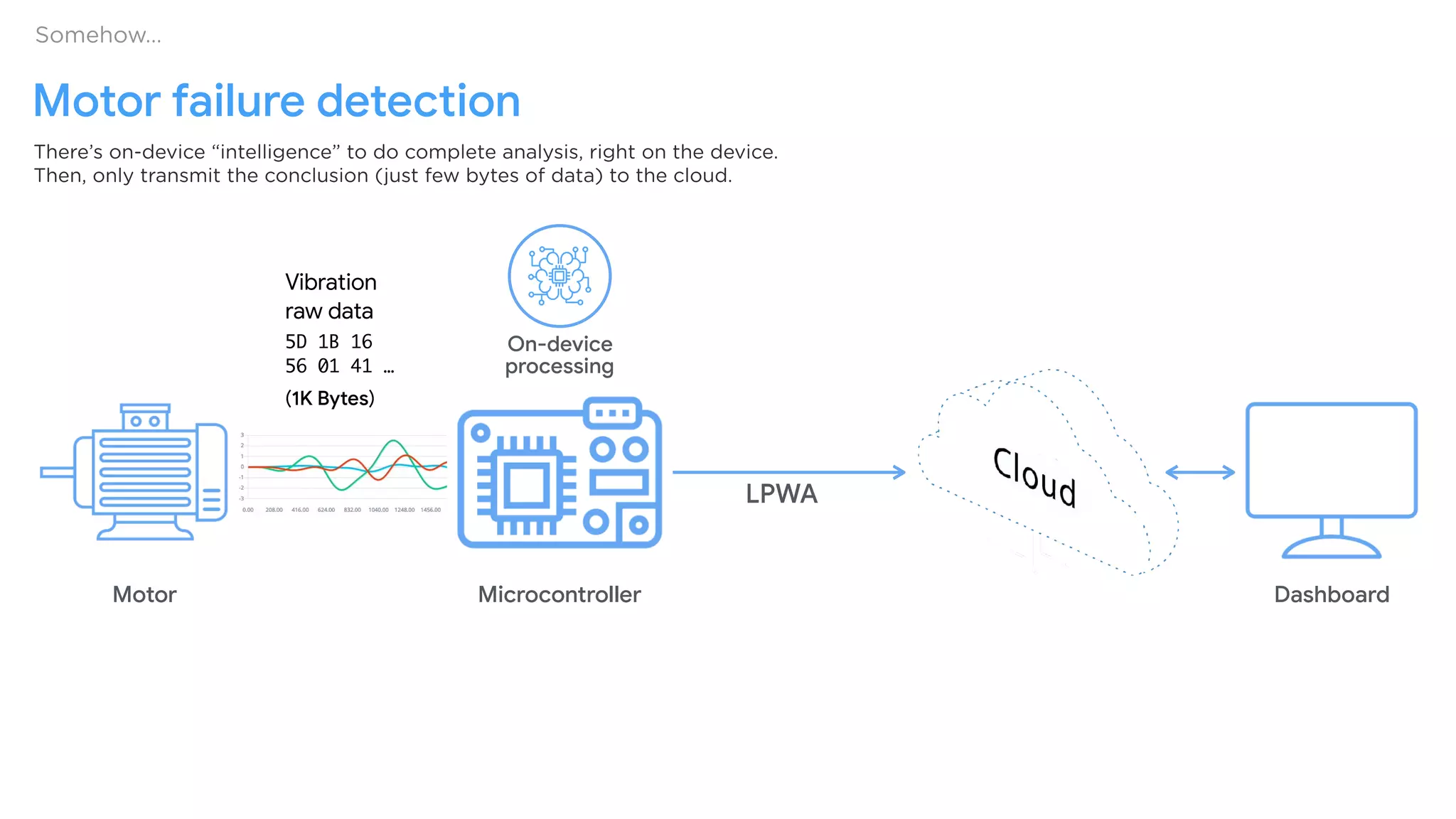
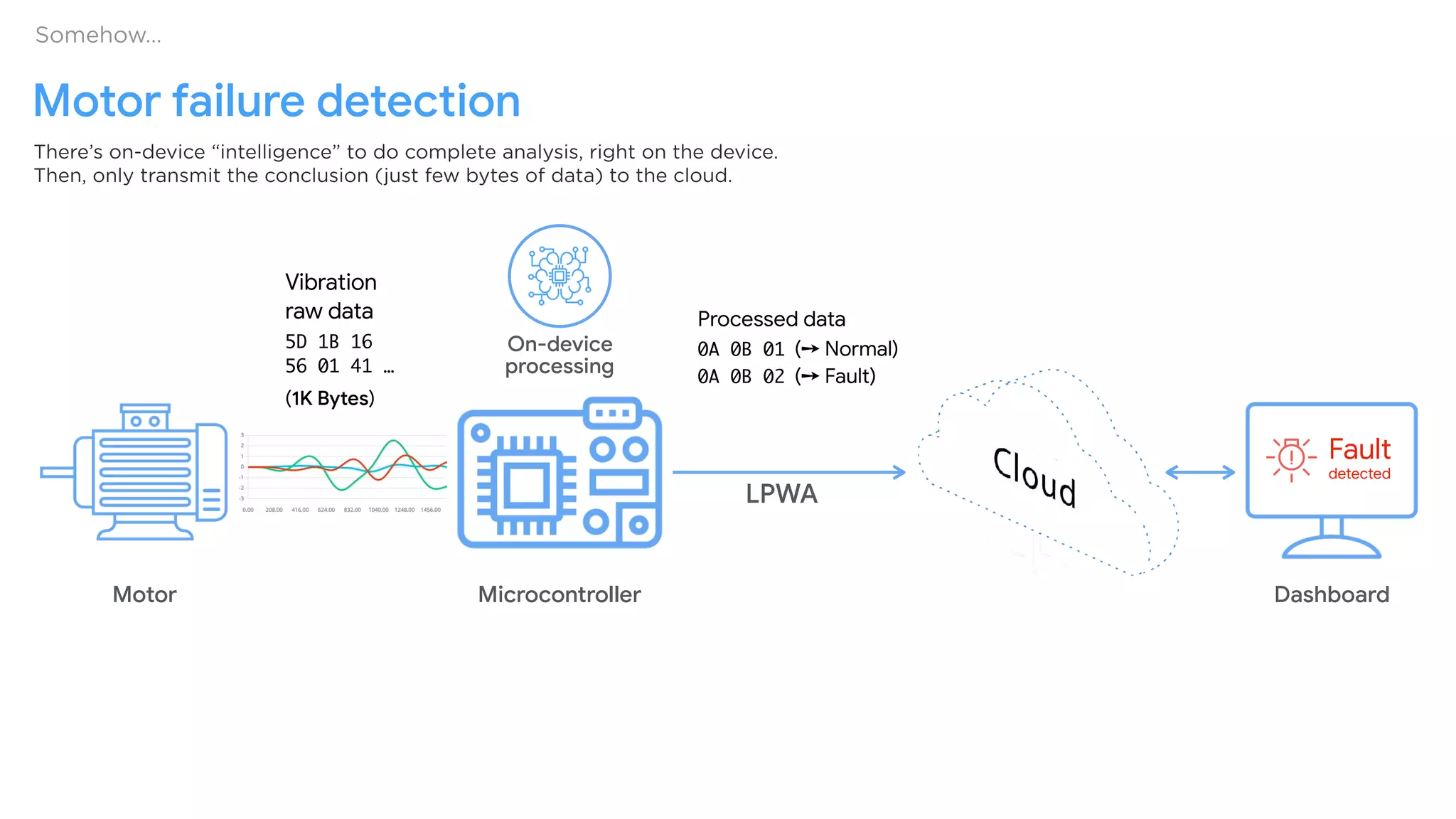
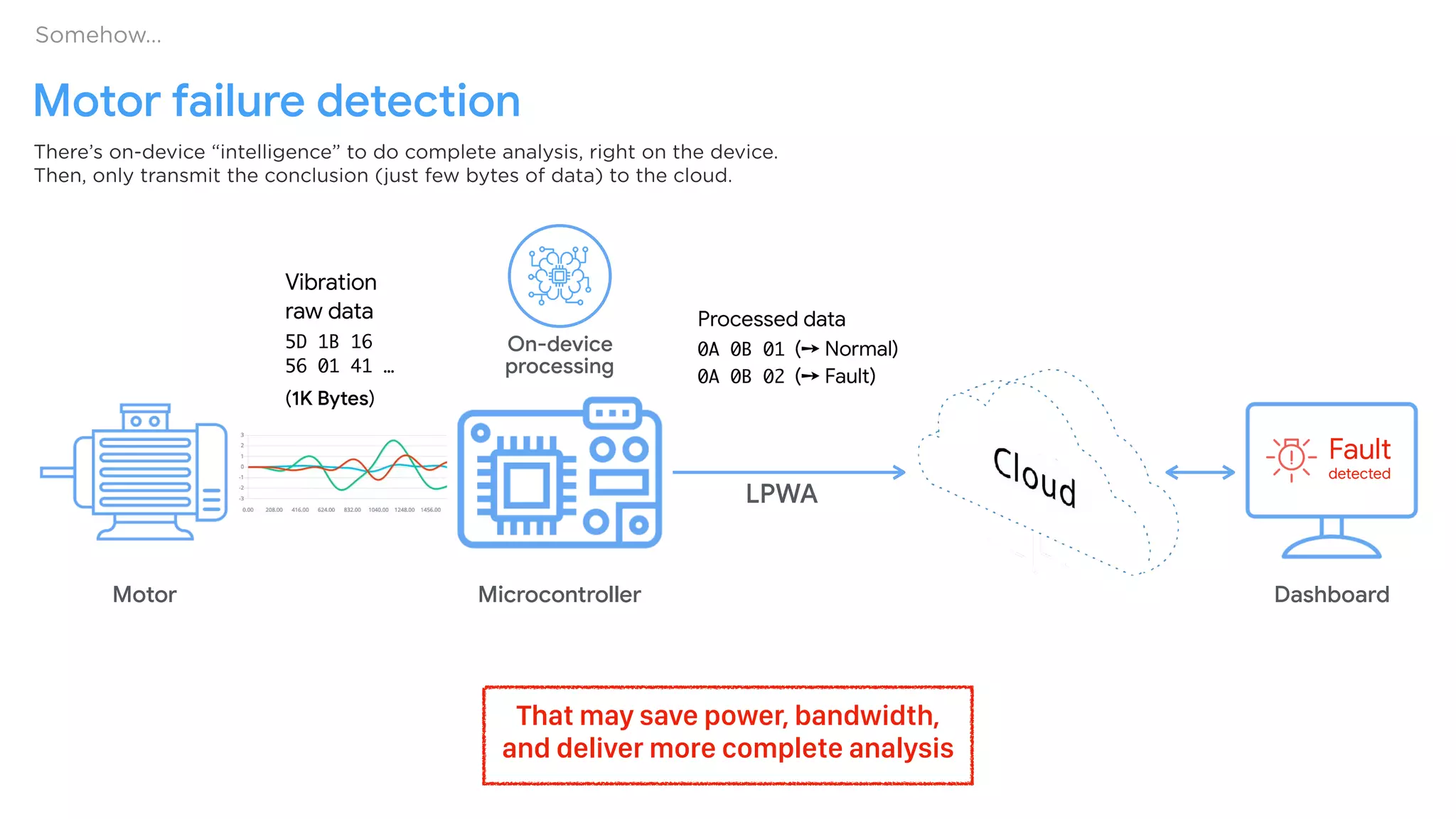
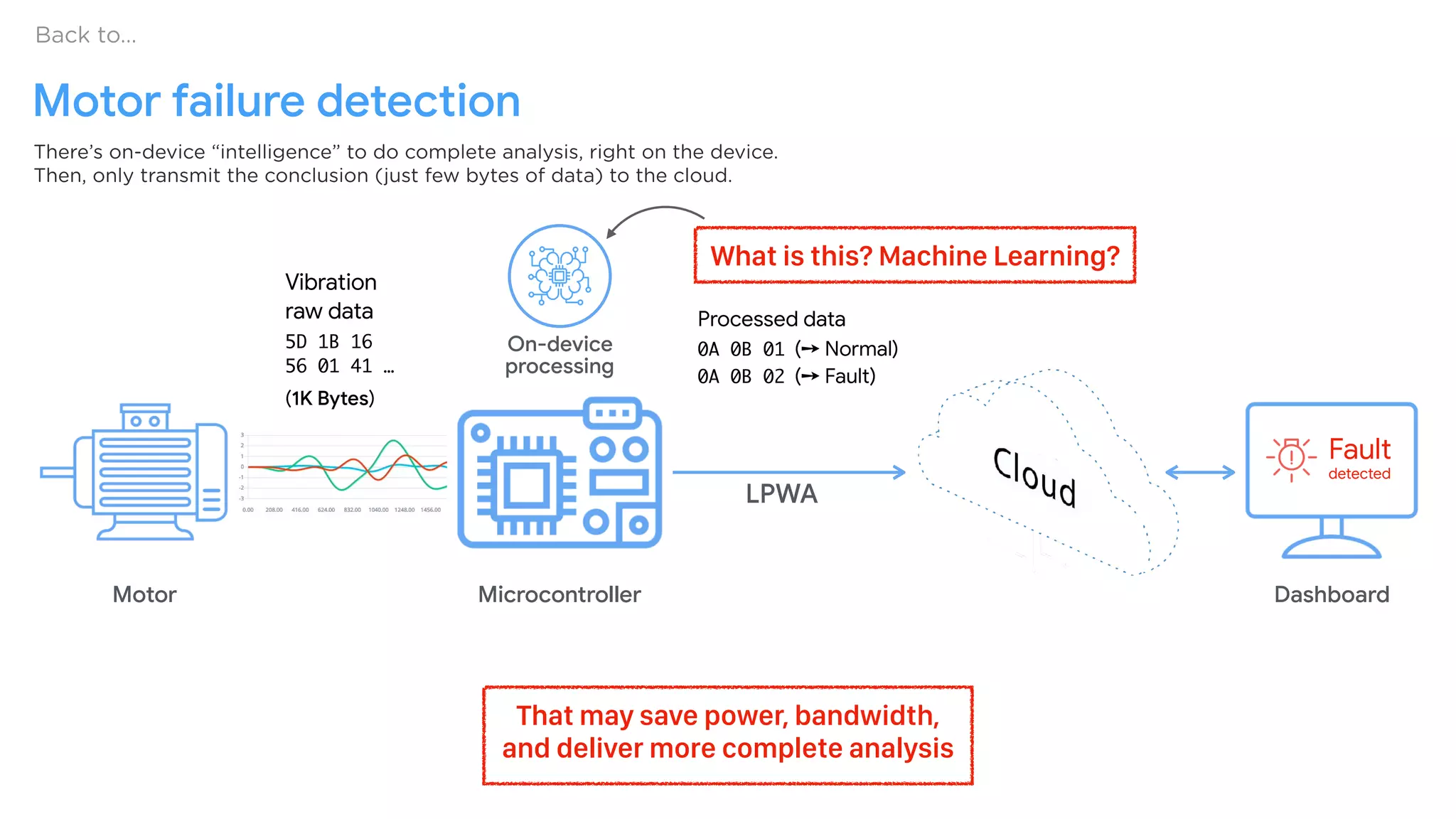
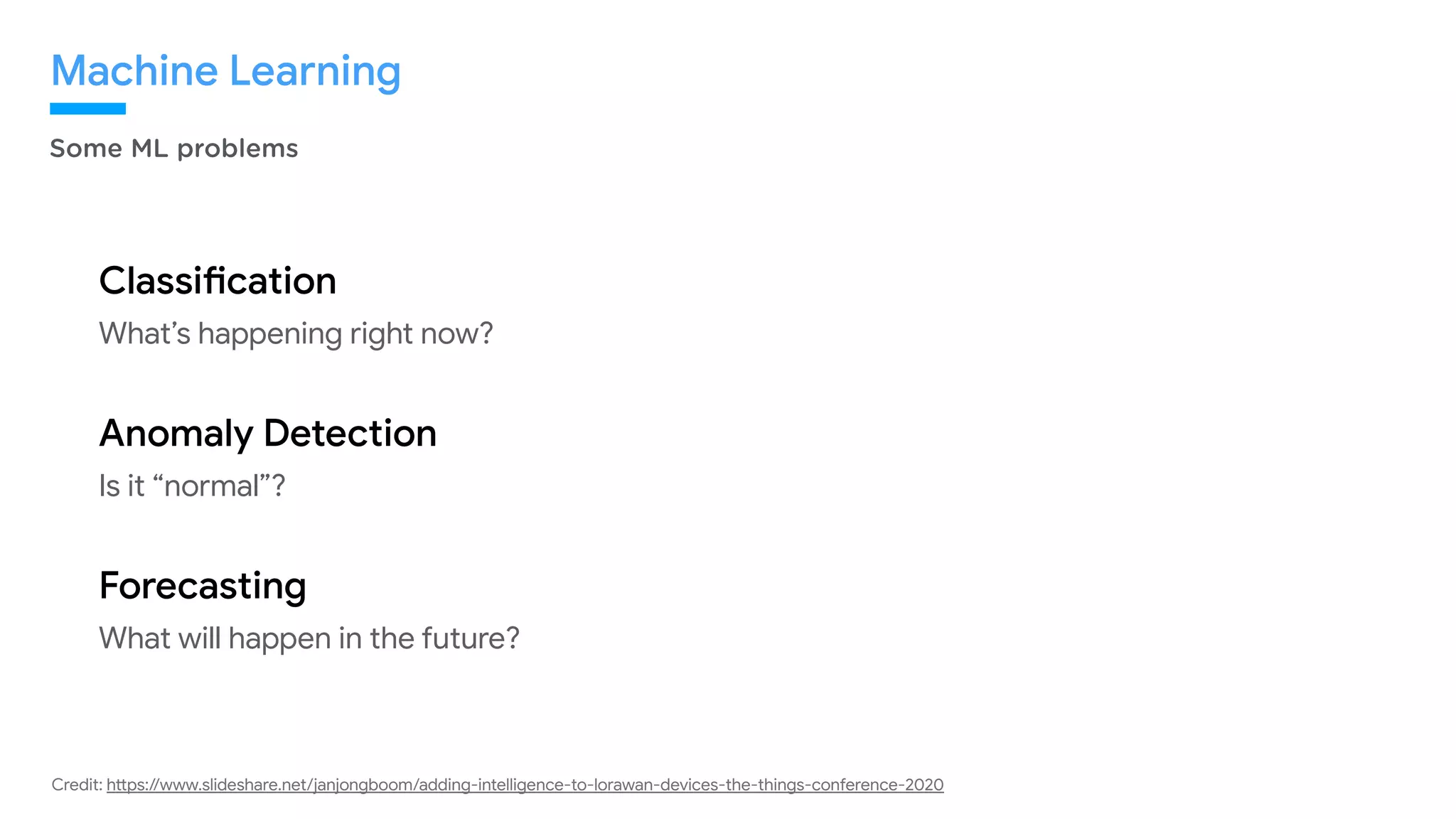
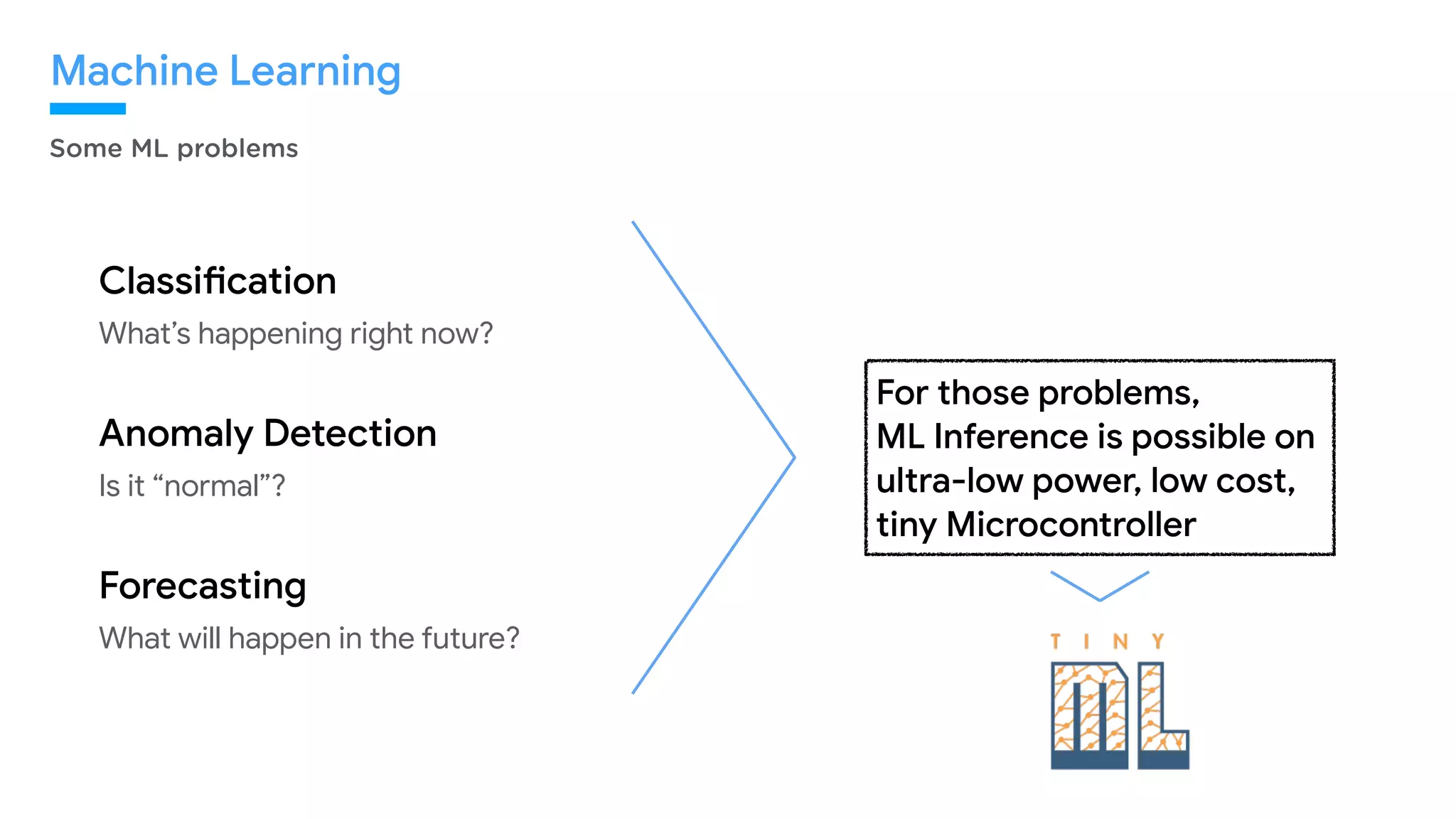
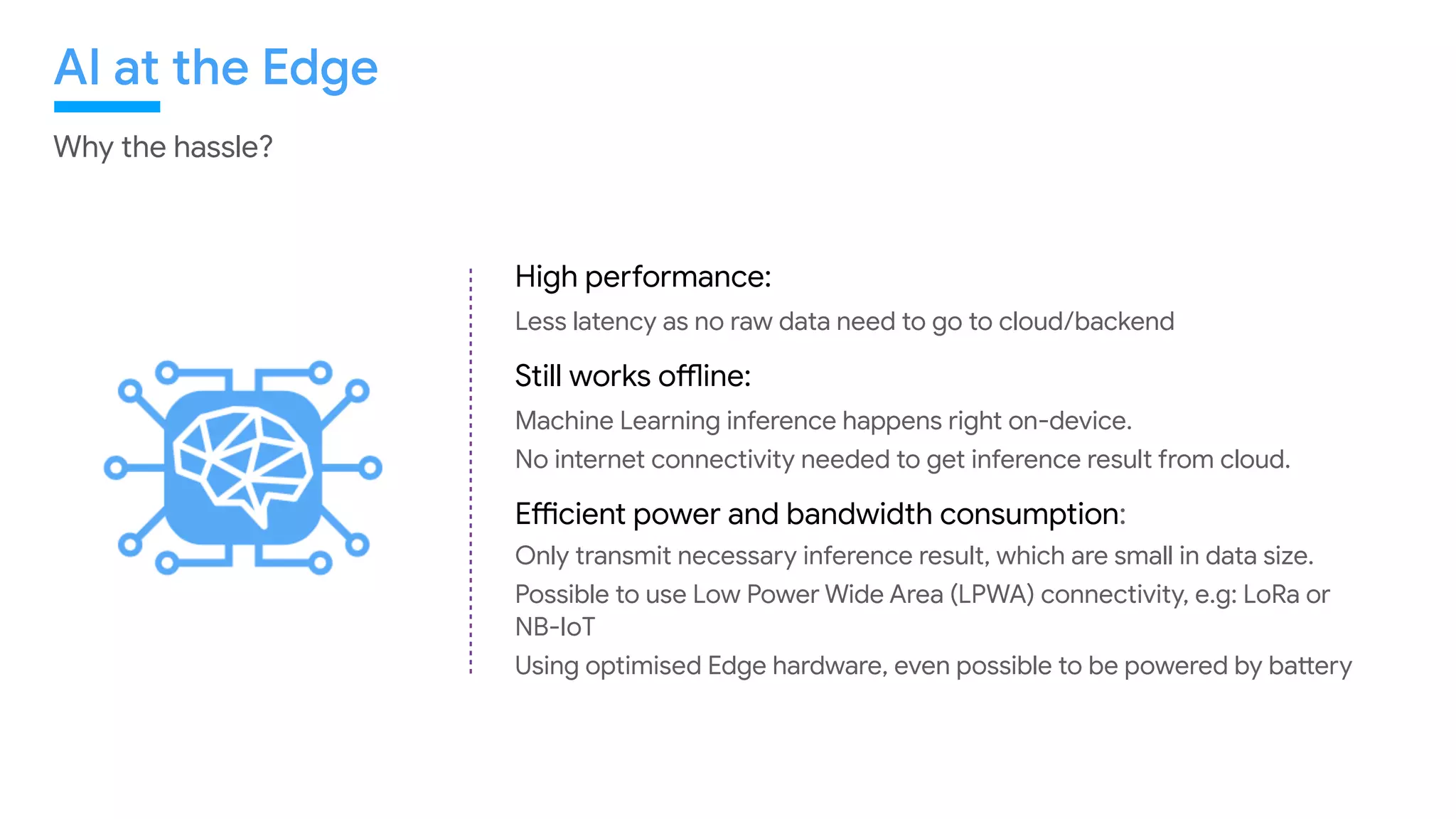
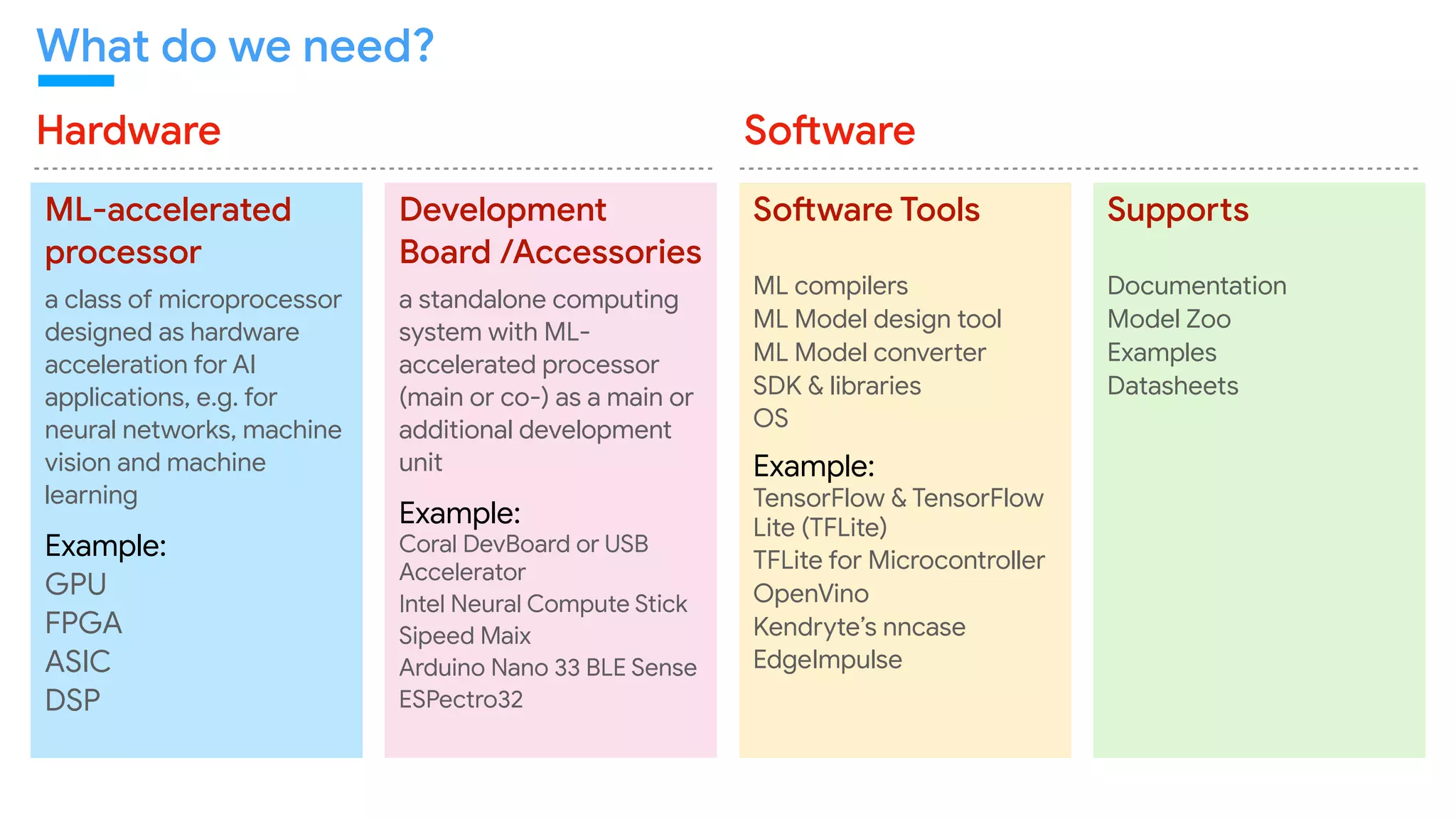
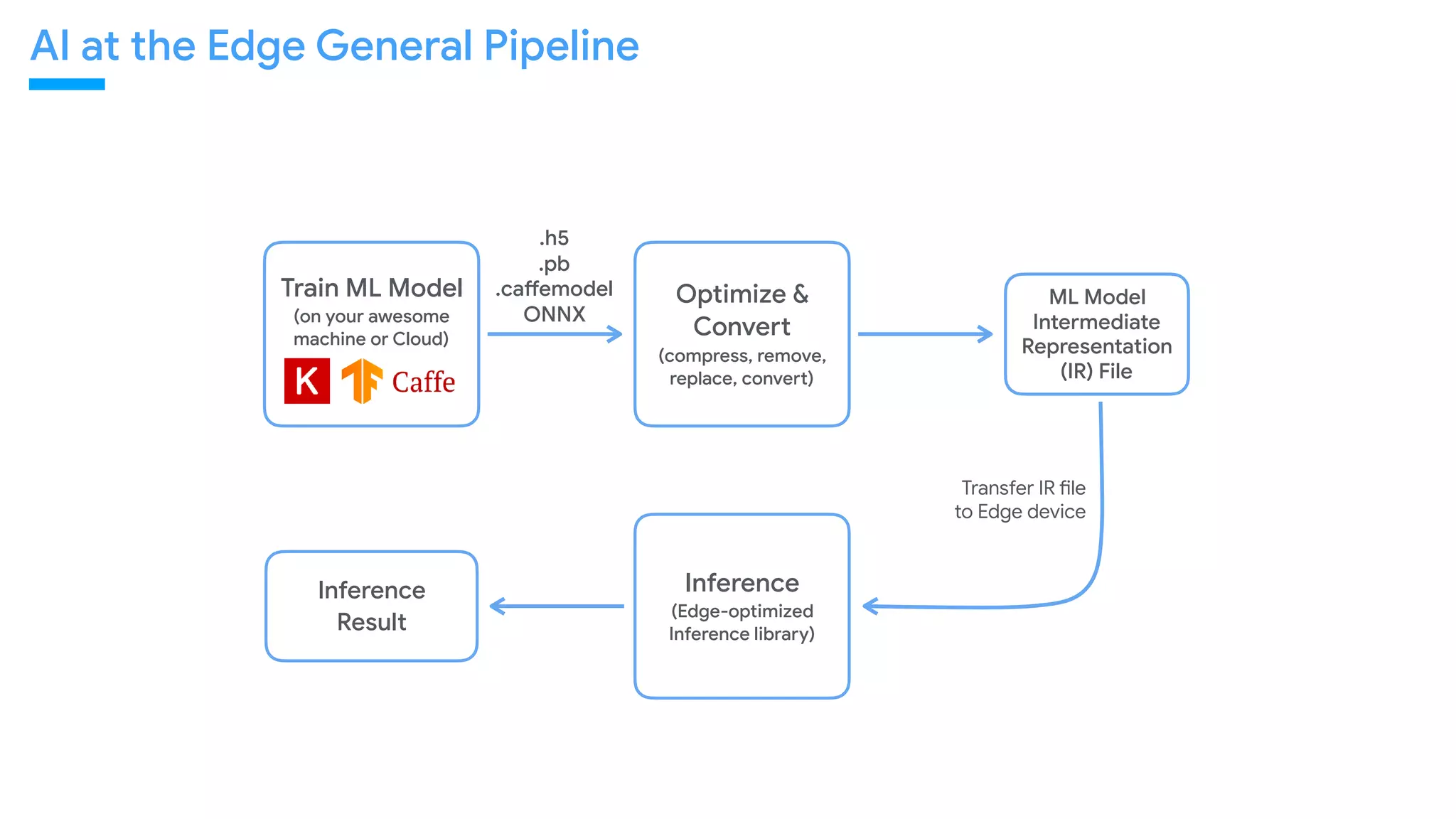
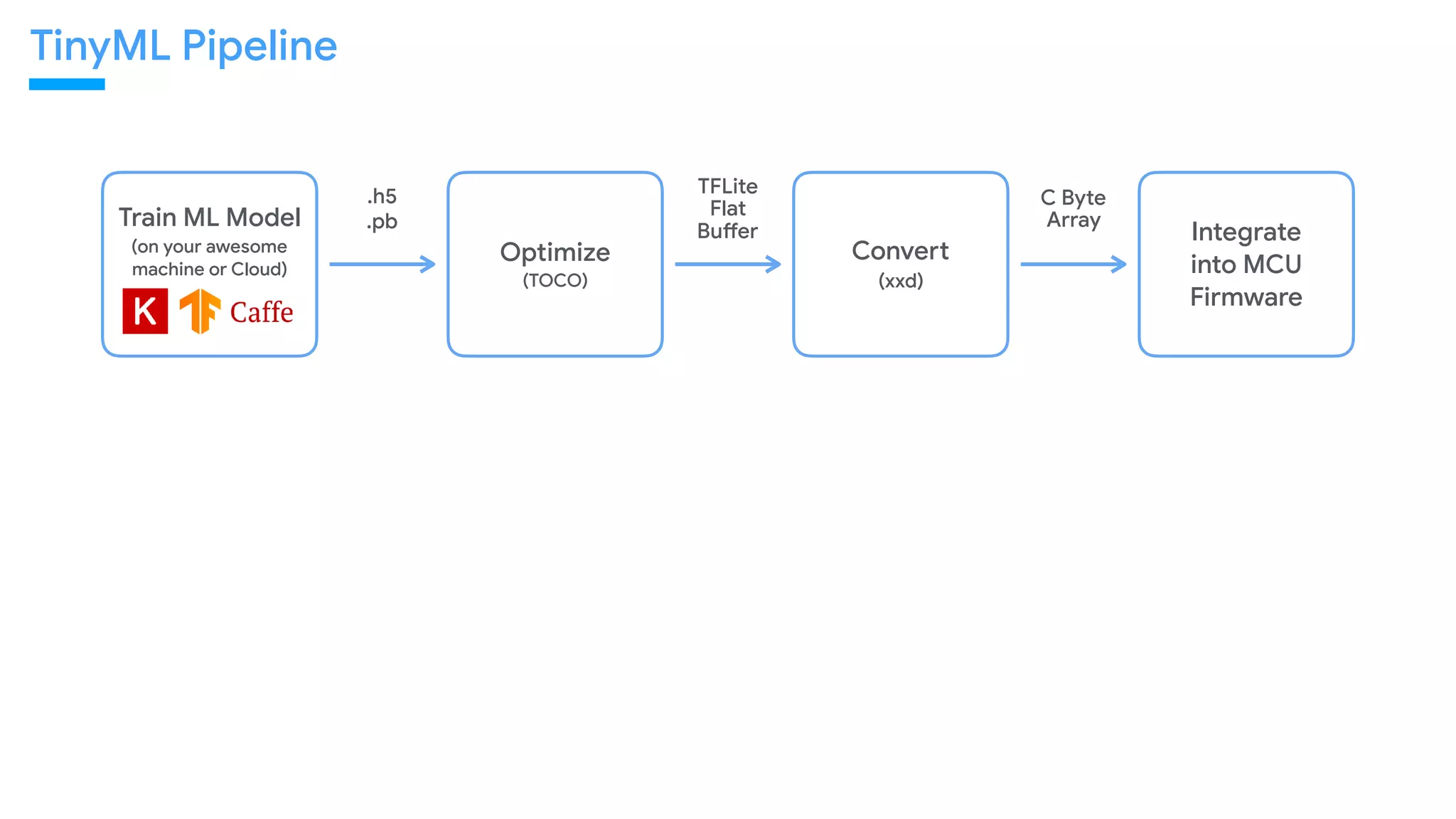
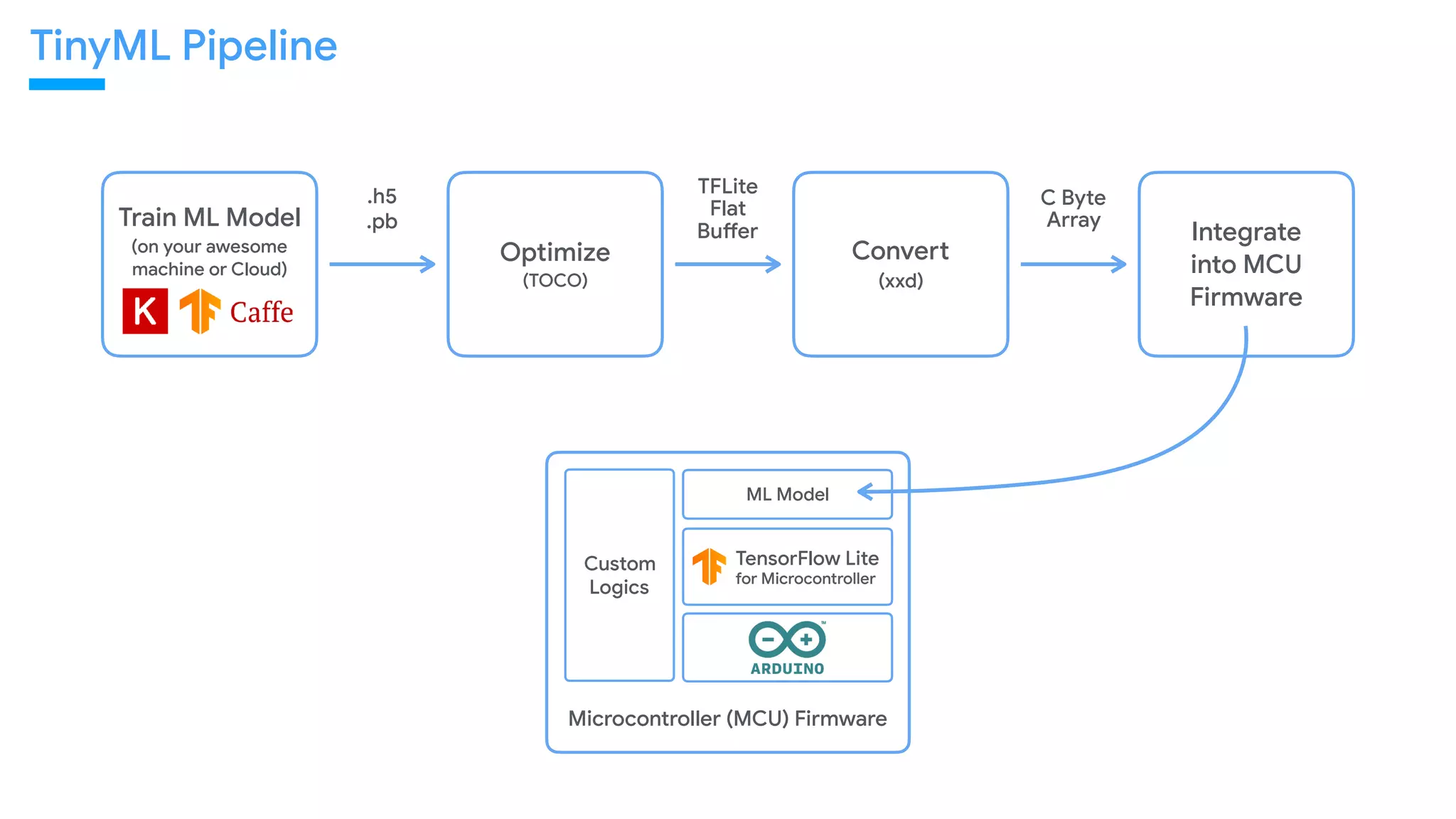


The document outlines a presentation by Andri Yadi at Arduino Day 2020, focusing on TinyML and its implementation using Arduino technologies. It discusses the power efficiency of IoT devices, emphasizing the importance of low power wide area networks (LPWA) and on-device processing for data analysis. Additionally, it highlights the use of machine learning for real-time insights and predictive maintenance in IoT applications, showcasing various hardware and software tools needed for development.