Downloaded 21 times
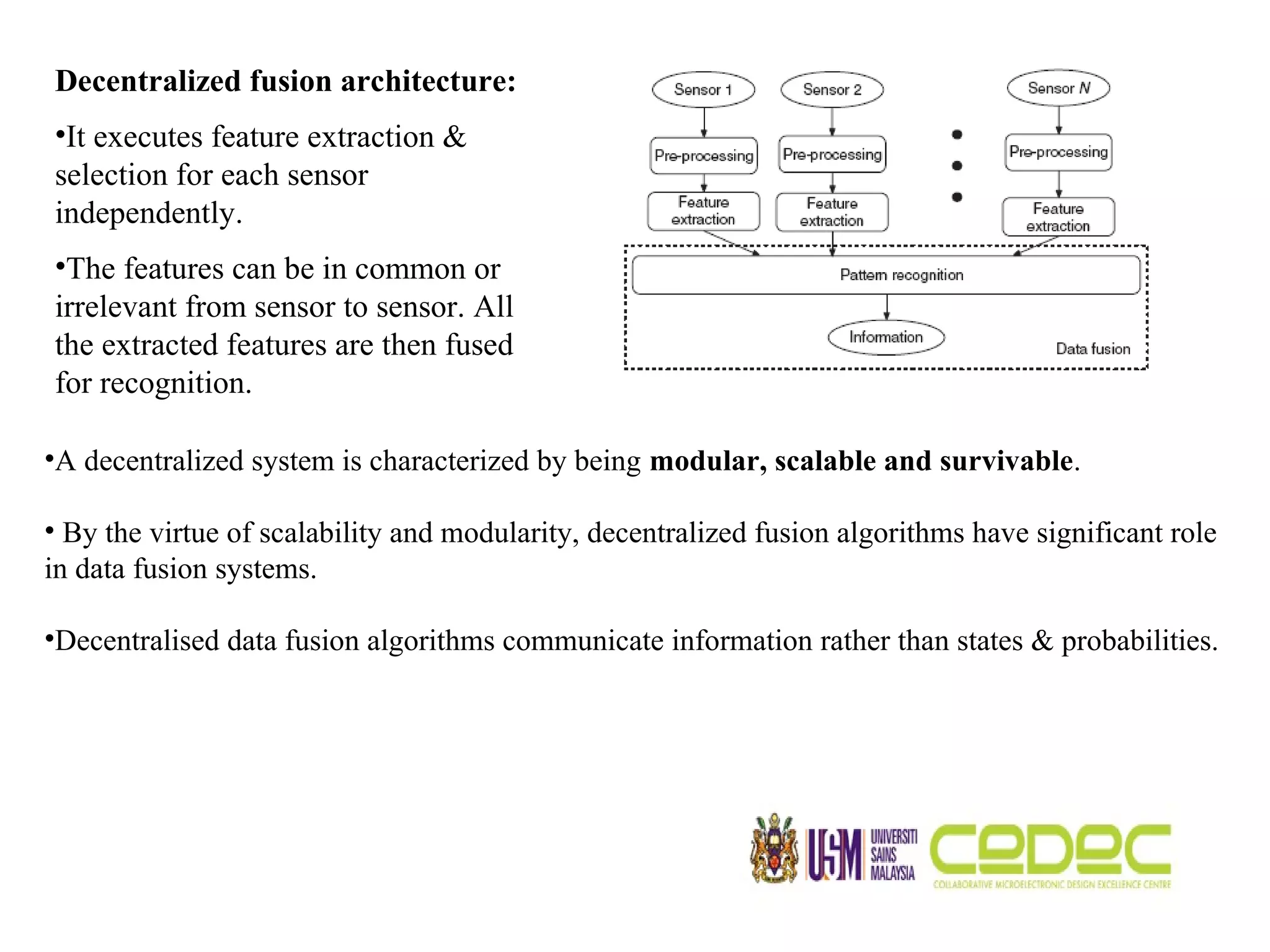
![Inertial measurement unit (IMU) An inertial measurement unit (IMU) is an electronic device that measures & reports on a craft's velocity, orientation, & gravitational forces, using a combination of accelerometers and gyroscopes [1] IMU works by detecting changes in pitch, roll, and yaw. [1] A.D. King: ‘Inertial Navigation-40 Years of Evolution’, GEC Review,13(3),(1998), p.140.](https://image.slidesharecdn.com/algorithm-121212221158-phpapp01/75/Decentralized-Data-Fusion-Algorithm-using-Factor-Analysis-Model-8-2048.jpg)
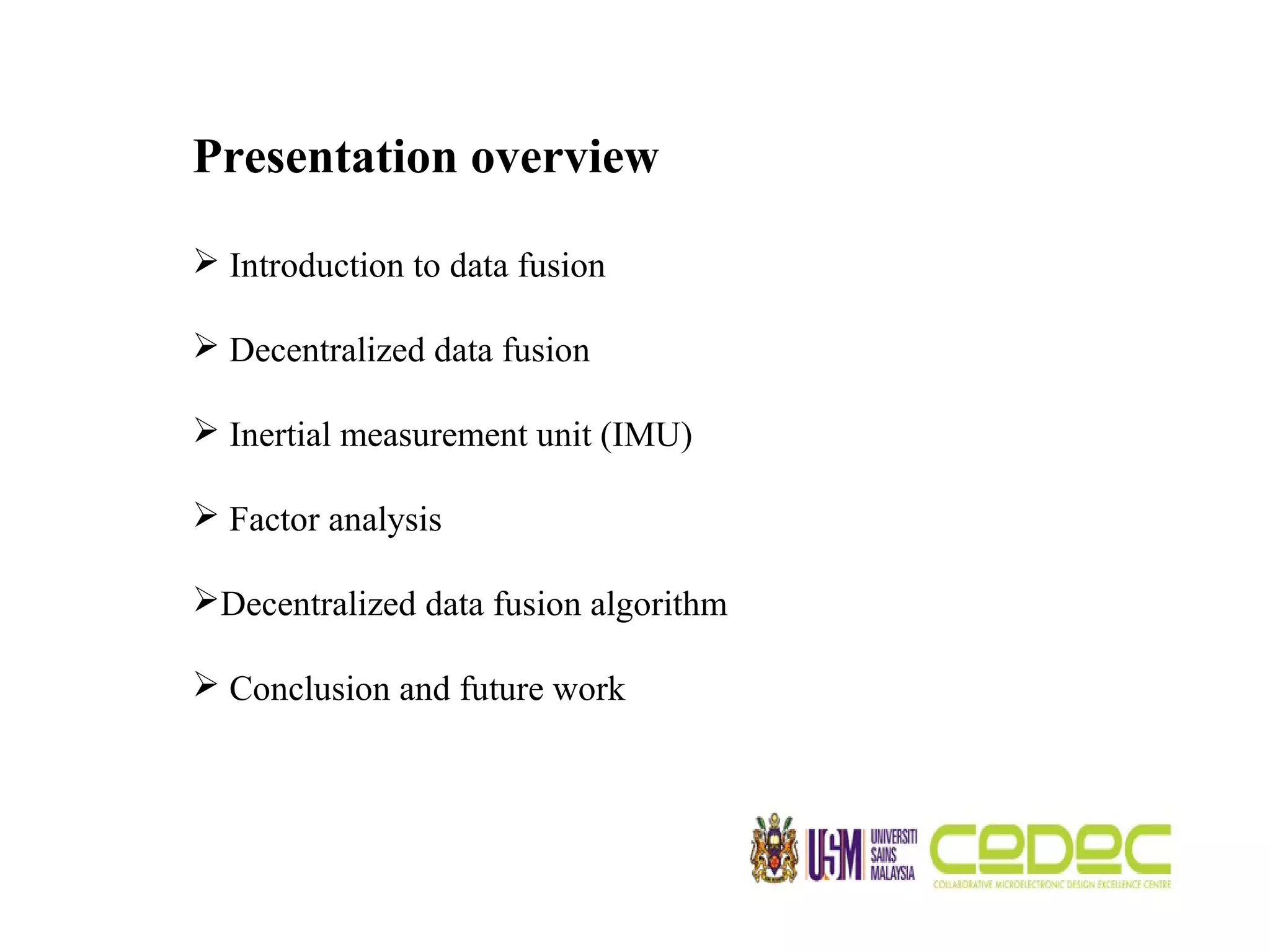
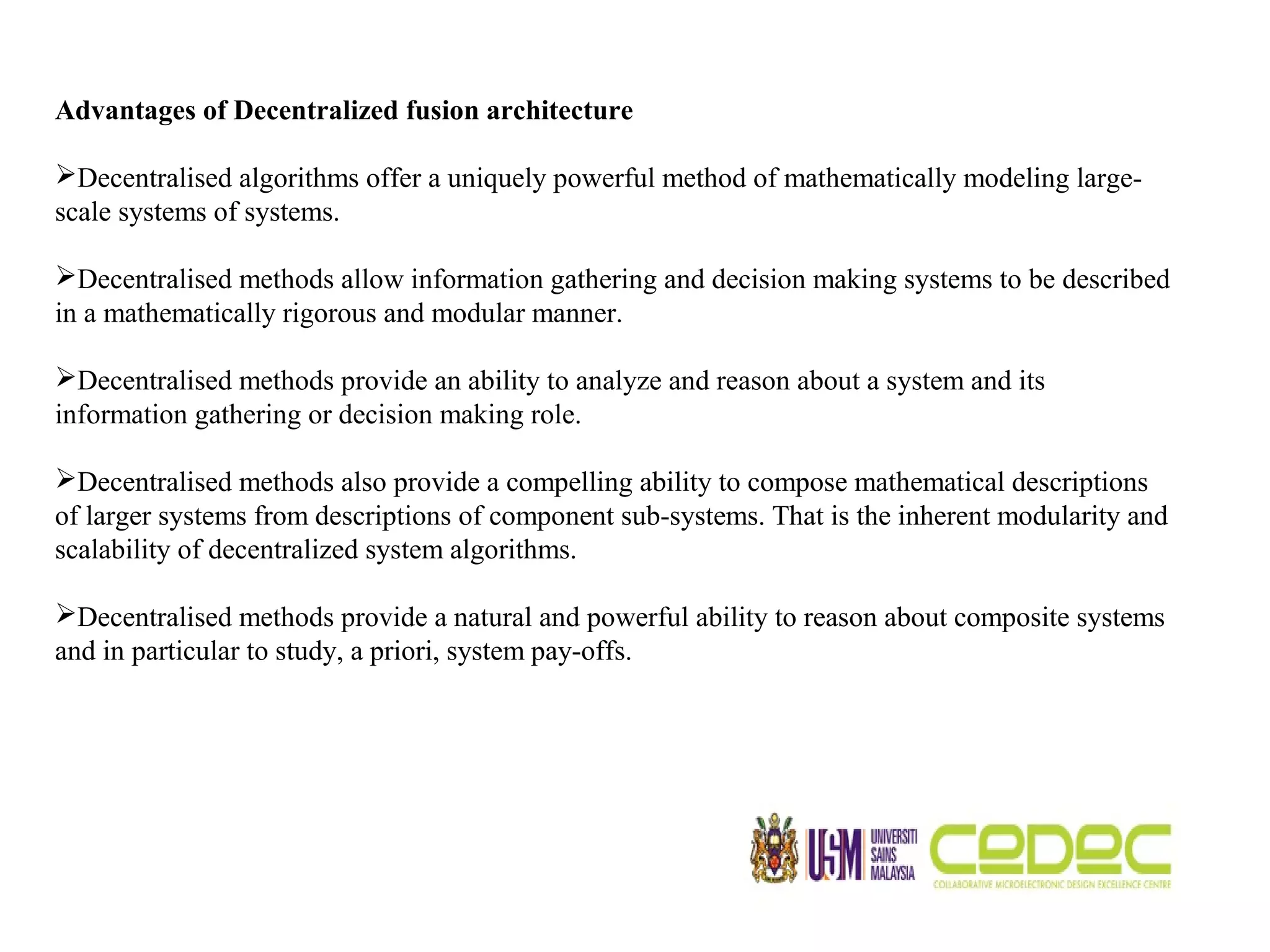
![Factor analysis is related to principal component analysis (PCA), but the two are not identical. The difference is: • Diagonal of the relationships matrix is replaced with communalities in Factor analysis. •The variance is accounted for more than one variable in Factor analysis. Factor Analysis Equations: Considering each object or record has p features, so Xij is the value of feature j for object i. We will center all the observations (subtract off their mean). We postulate that there are q factor variables, and each observation is a linear combination of factor scores Fir plus noise: Xij= εij + Firwrj (1) The weights wrj are called the factor loadings of the observable features; how much feature j changes, on average, in response to a one-unit change in factor score r. Here εij is as usual the noise term for feature j on object i. We will assume this has mean zero and variance ψj that is, different features has differently sized noise terms. The ψ j are known as the specific variances, because they are specific to individual features. We will further assume that E[εij εlm] = 0, unless i = l, j = m, that is, each object and each feature has uncorrelated noise.](https://image.slidesharecdn.com/algorithm-121212221158-phpapp01/75/Decentralized-Data-Fusion-Algorithm-using-Factor-Analysis-Model-10-2048.jpg)
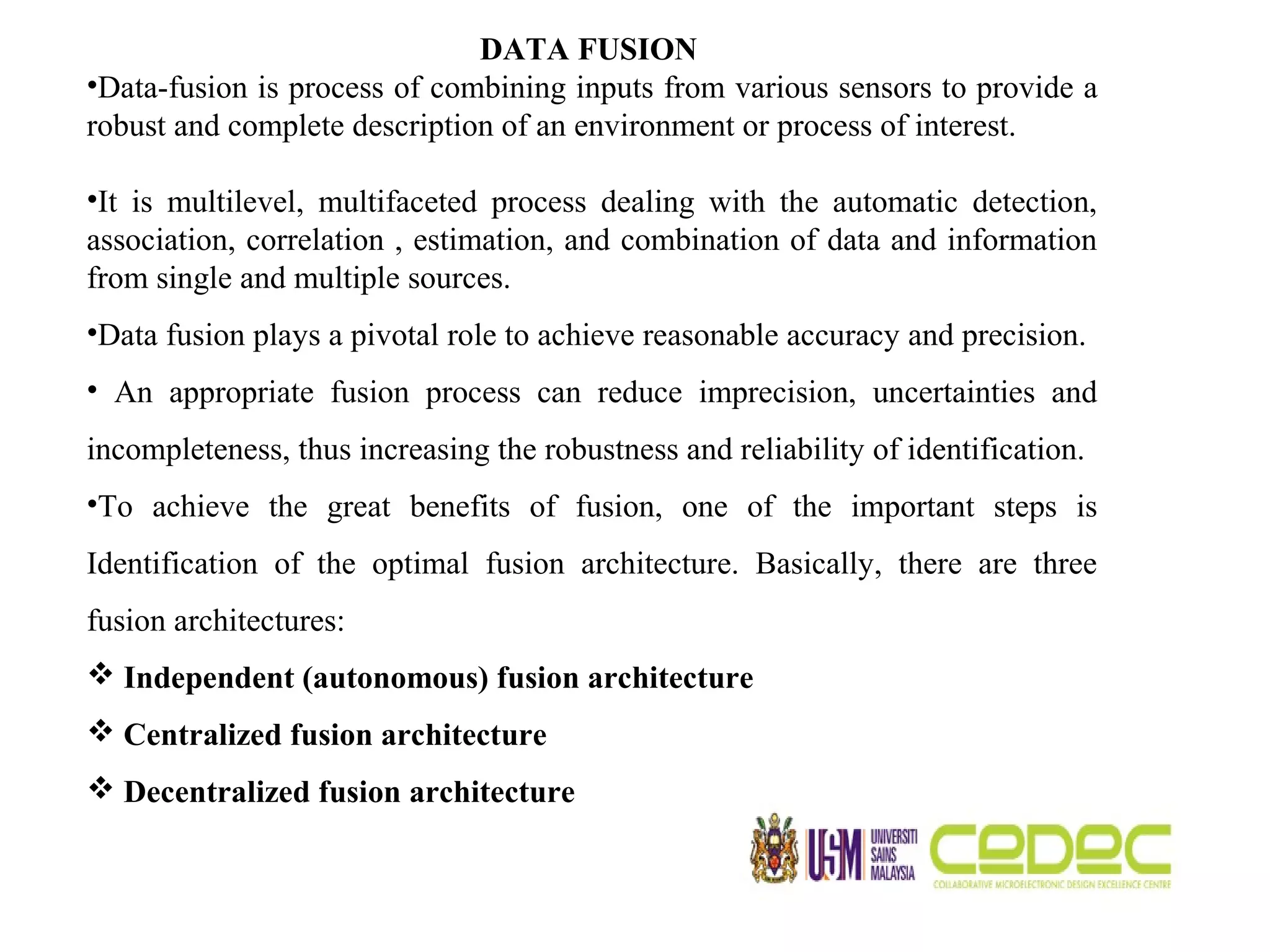
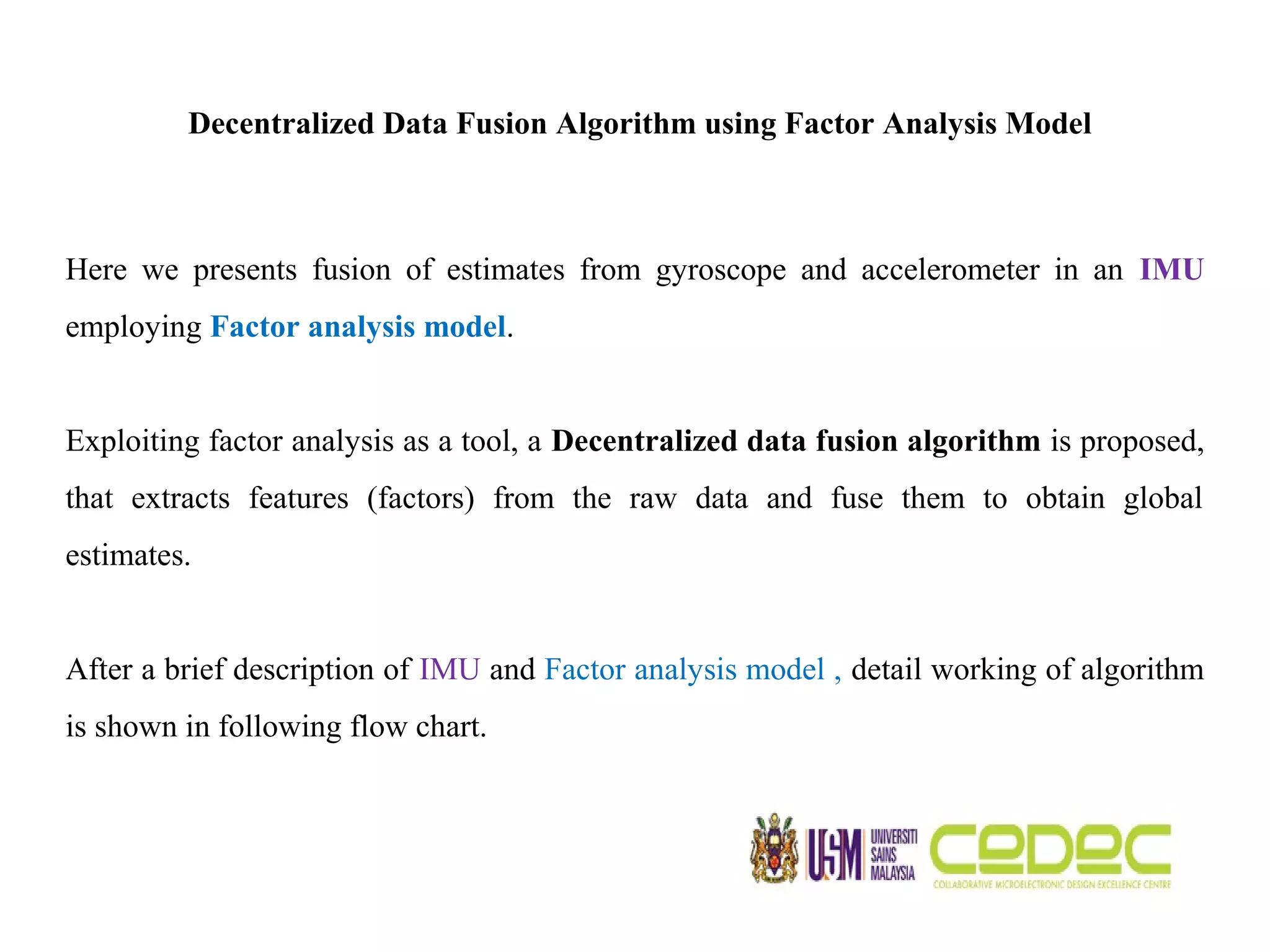
![We can also re-write the model in vector form, (2) With w being a q x p matrix. If we stack the vectors into a matrix, we get X= ε + Fw (3) [2] This is the factor analysis model. In a factor analysis model, the measured variables depend on a smaller number of unobserved (latent) factors. Because each factor might affect several variables in common, they are known as common factors. Each variable is assumed dependent on a linear combination of the common factors, and the coefficients are known as loadings. Each measured variable also includes a component due to independent random variability, known as specific variance because it is specific to one variable. Specifically, factor analysis assumes that the covariance matrix of data is of the form ∑x = ΛΛT + Ψ (4) Where Λ is the matrix of loadings and the elements of the diagonal matrix Ψ are the specific variances. The function factoran fits the factor analysis model using maximum likelihood. Where Λ is the matrix of loadings and the elements of the diagonal matrix Ψ are the specific variances. Factor analysis assumes that the covariance matrix of data is of the form. SigmaX = Lambda*Lambda' + Psi (5) Where Lambda is the matrix of loadings and the elements of the diagonal matrix Psi are the specific variances. [2] Jing, T , An Algorithm for estimating signals using factor analysis model, China 1991 Int. Con. Circuits and Systems, 1991, China , pp. 358-360](https://image.slidesharecdn.com/algorithm-121212221158-phpapp01/75/Decentralized-Data-Fusion-Algorithm-using-Factor-Analysis-Model-11-2048.jpg)
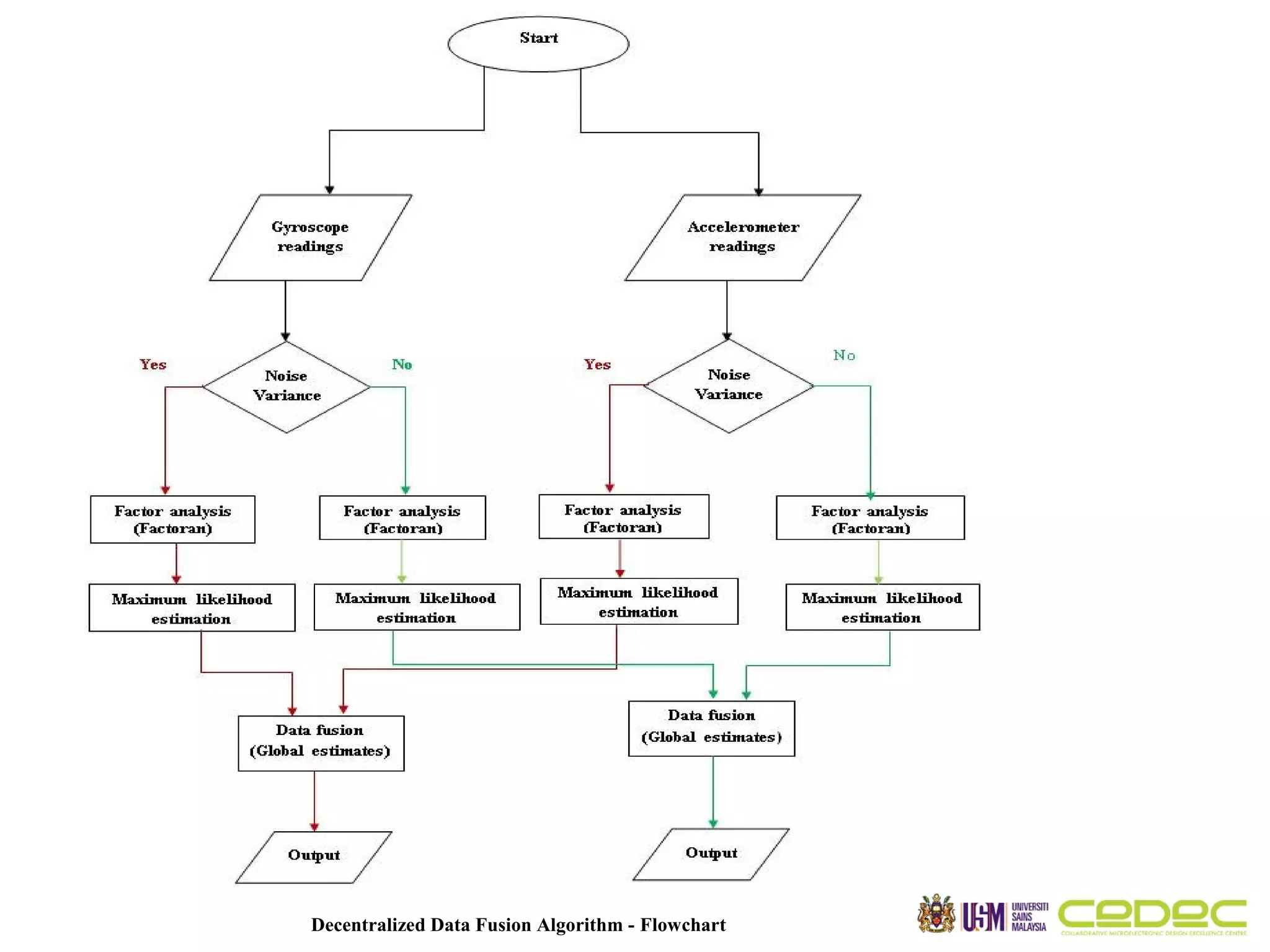
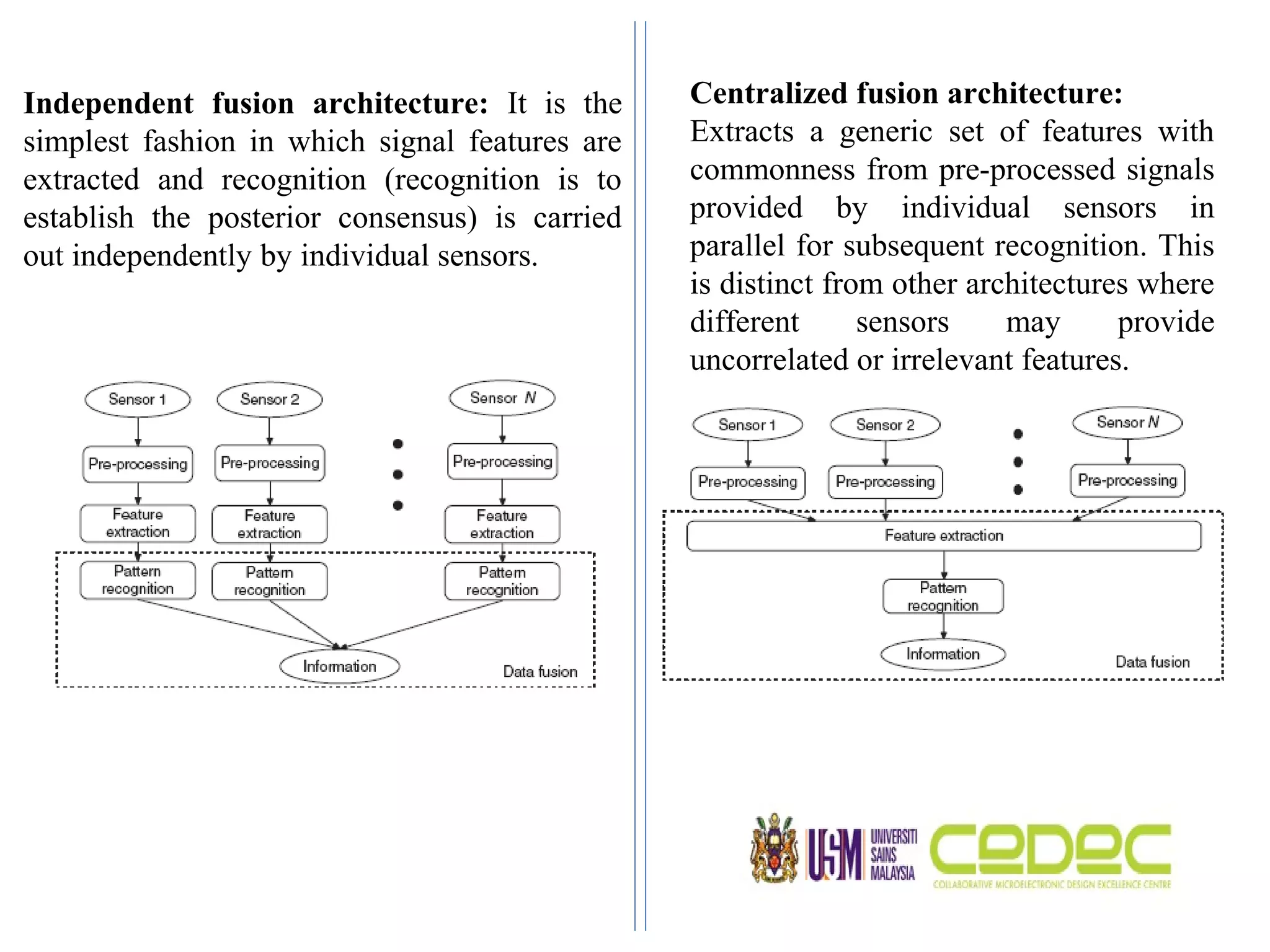
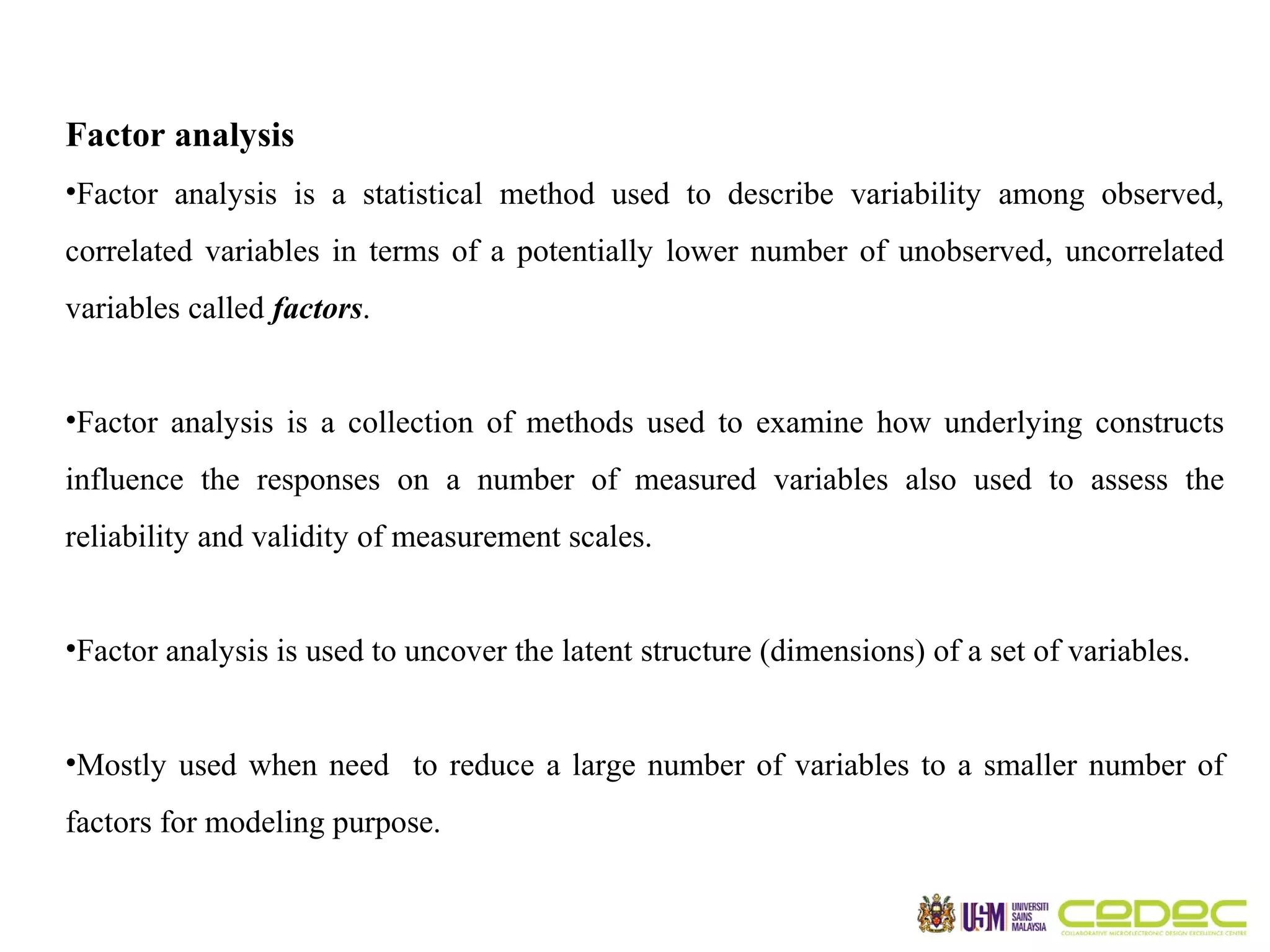
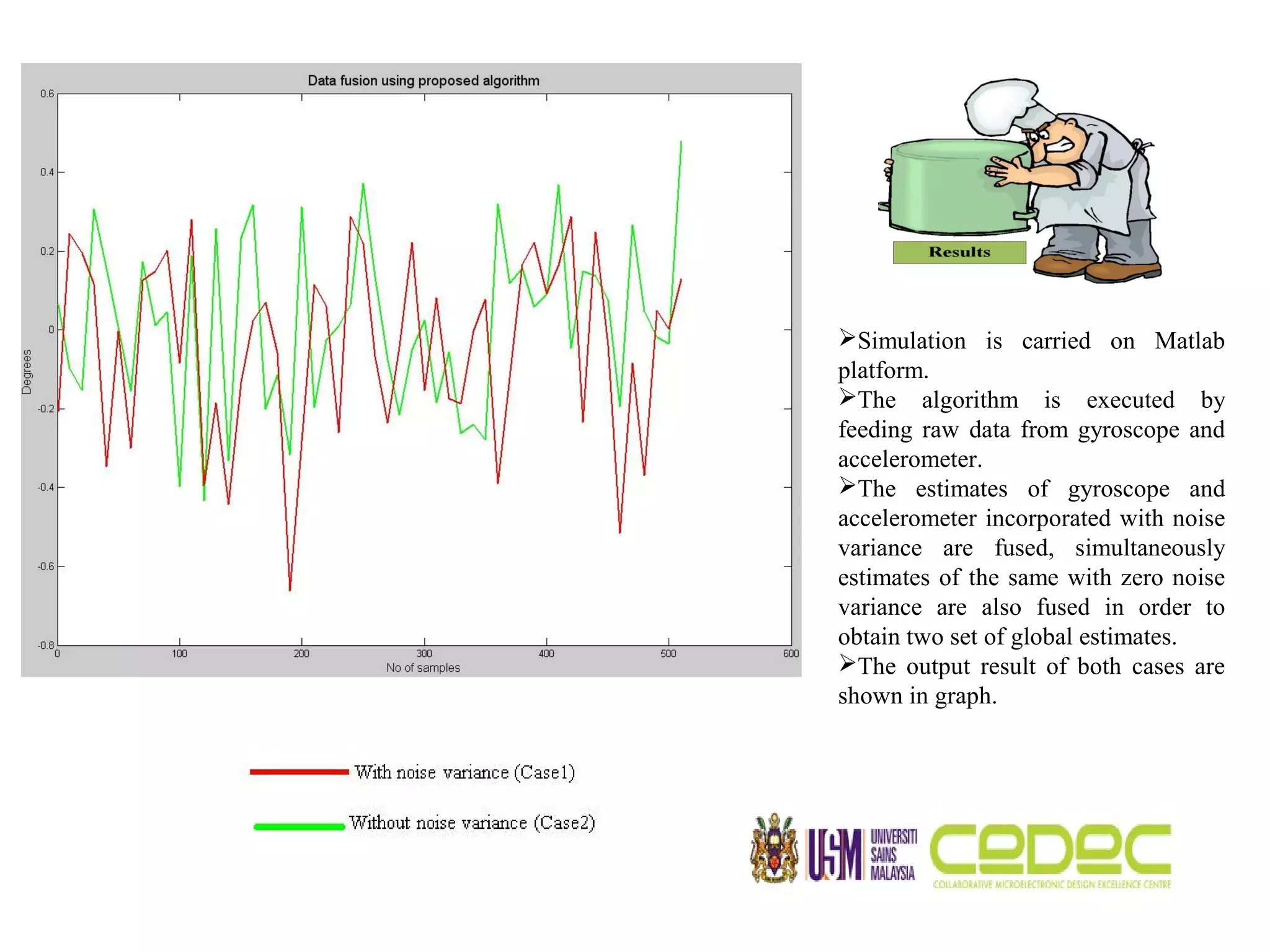
![Data is obtained from the SparkFun IMU that has noise variance of 0.07701688 for accelerometer & 0.00025556 for gyroscope [3]. Factor analysis is carried using the Matlab Statistics Toolbox™. The flow of data and various steps of the algorithm are shown in flowchart. Two set of maximum likelihood estimates are obtained: Case1) With noise variance. Case 2) Without noise variance. In the final step of algorithm, Maximum likelihood estimates (MLE) incorporating noise in gyroscope and accelerometer (case1) and ML estimates without noise (case2) are fused and global estimates are obtained. [3] http://home.comcast.net/~michael.p.thompson/kalman/kalman_test2.c](https://image.slidesharecdn.com/algorithm-121212221158-phpapp01/75/Decentralized-Data-Fusion-Algorithm-using-Factor-Analysis-Model-13-2048.jpg)



The document presents a decentralized data fusion algorithm using a factor analysis model for inertial measurement units (IMUs) to improve data accuracy. It explains the importance of data fusion, outlines different architectures, and details the algorithm's implementation with gyroscope and accelerometer data. Future work will focus on analyzing estimation errors and comparing the proposed method with existing algorithms.