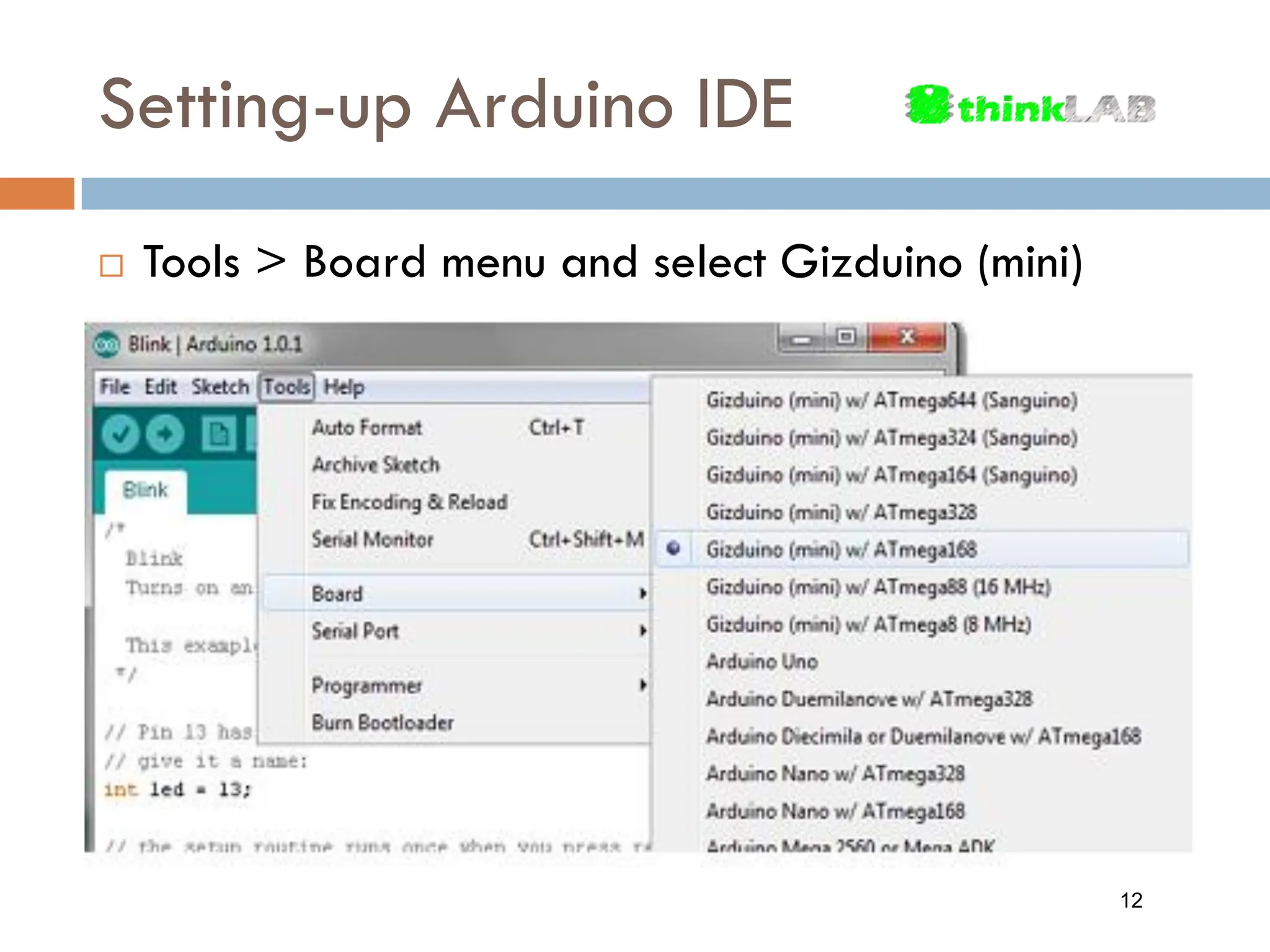
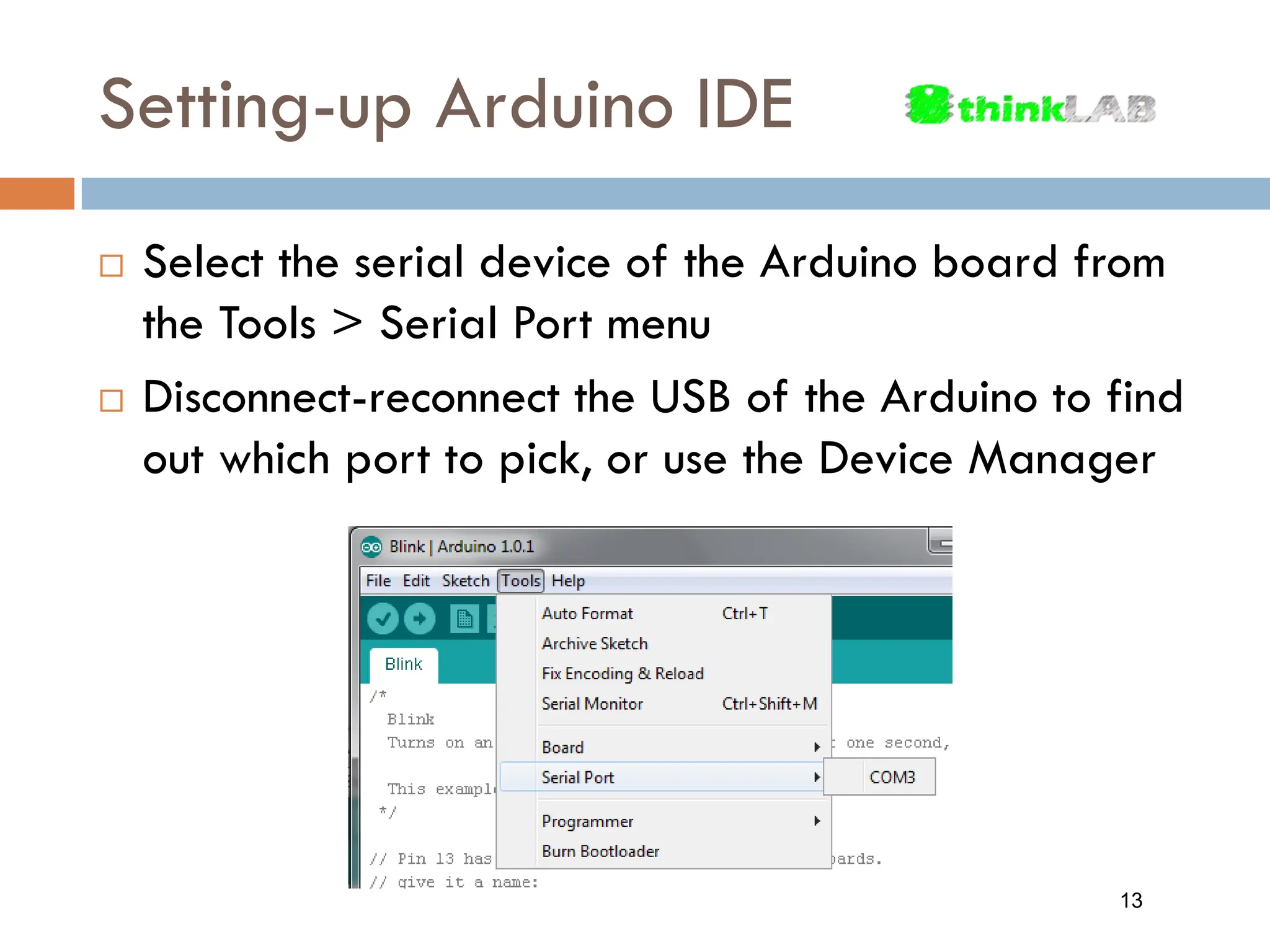
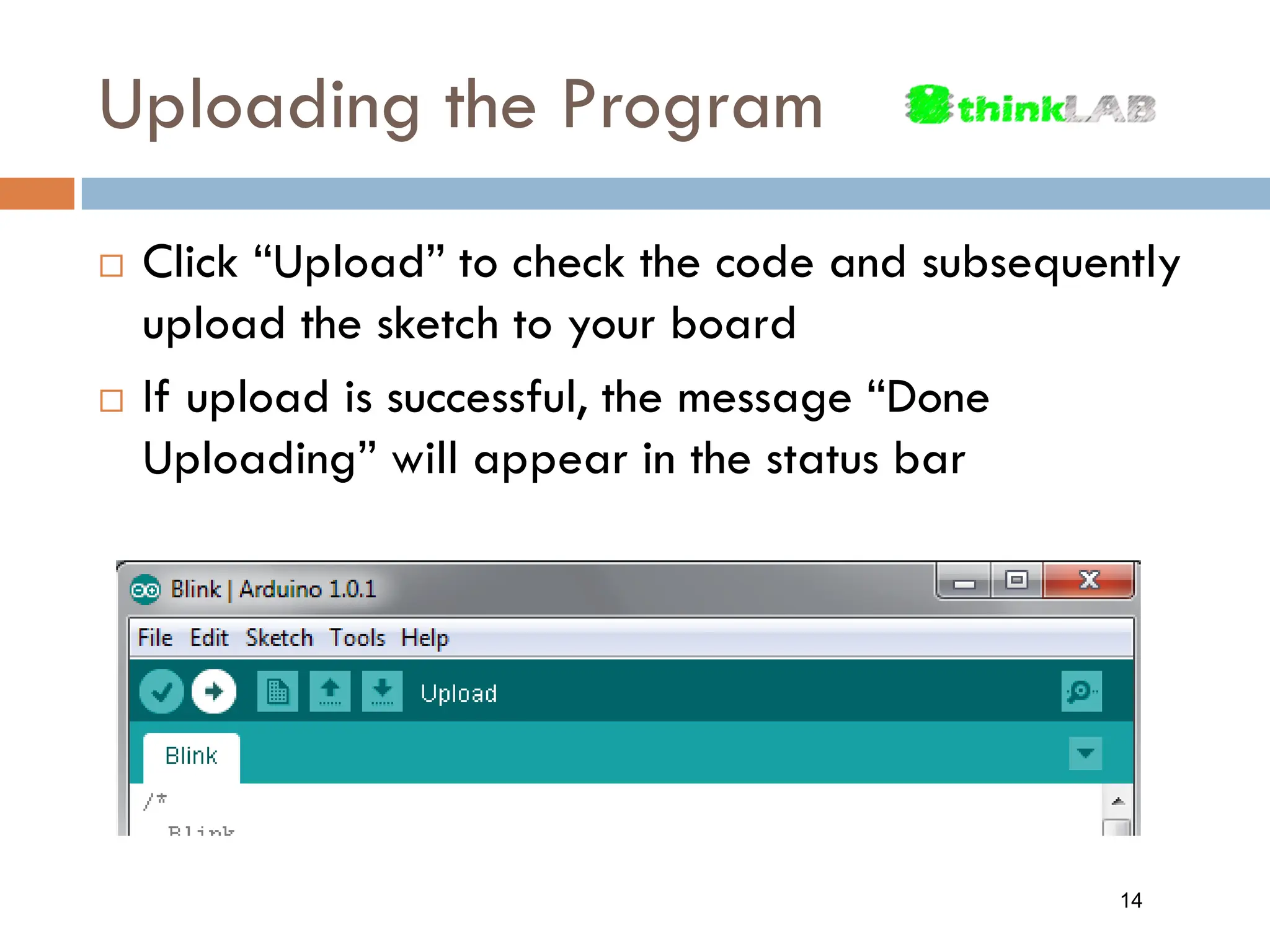
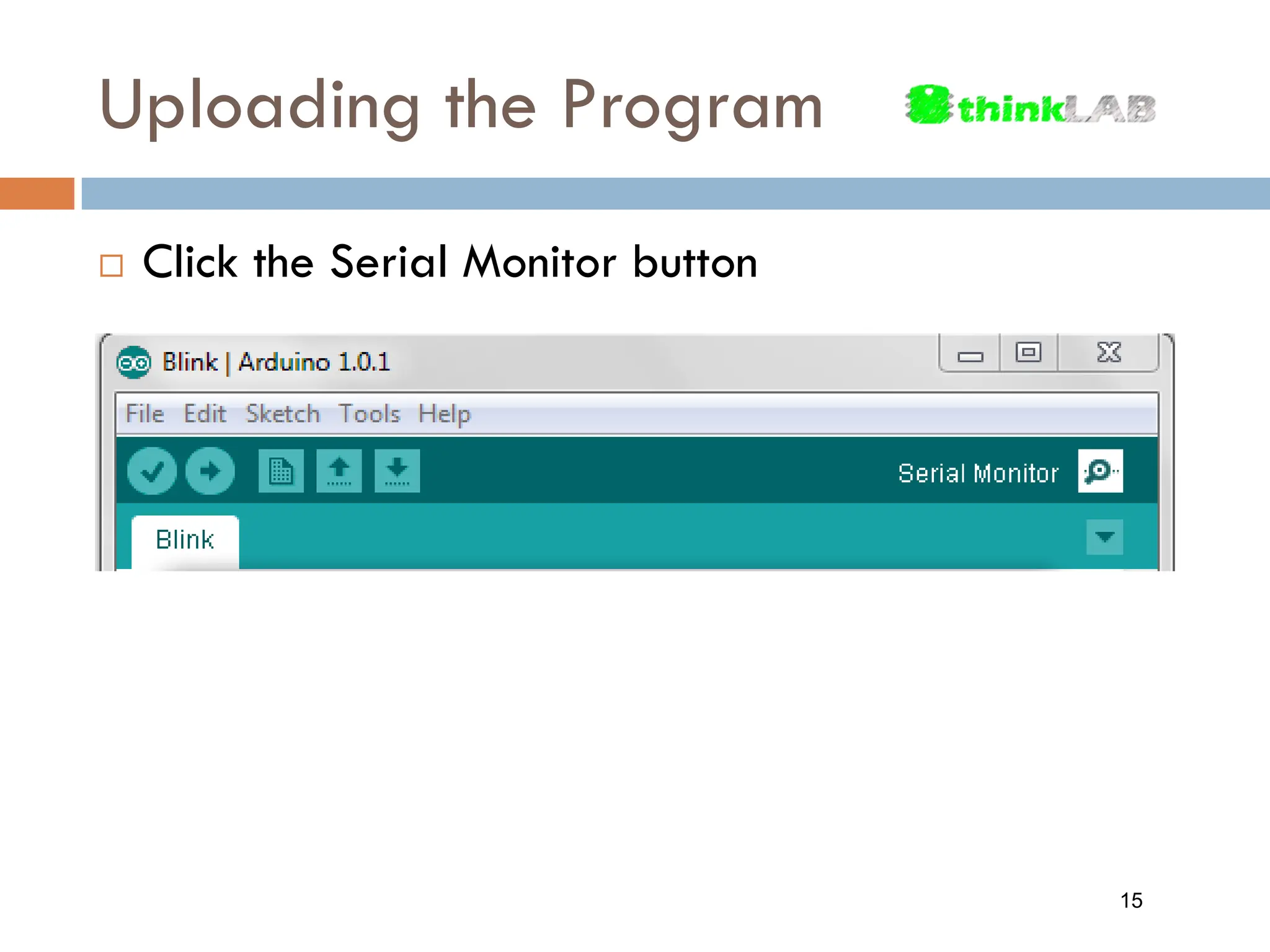
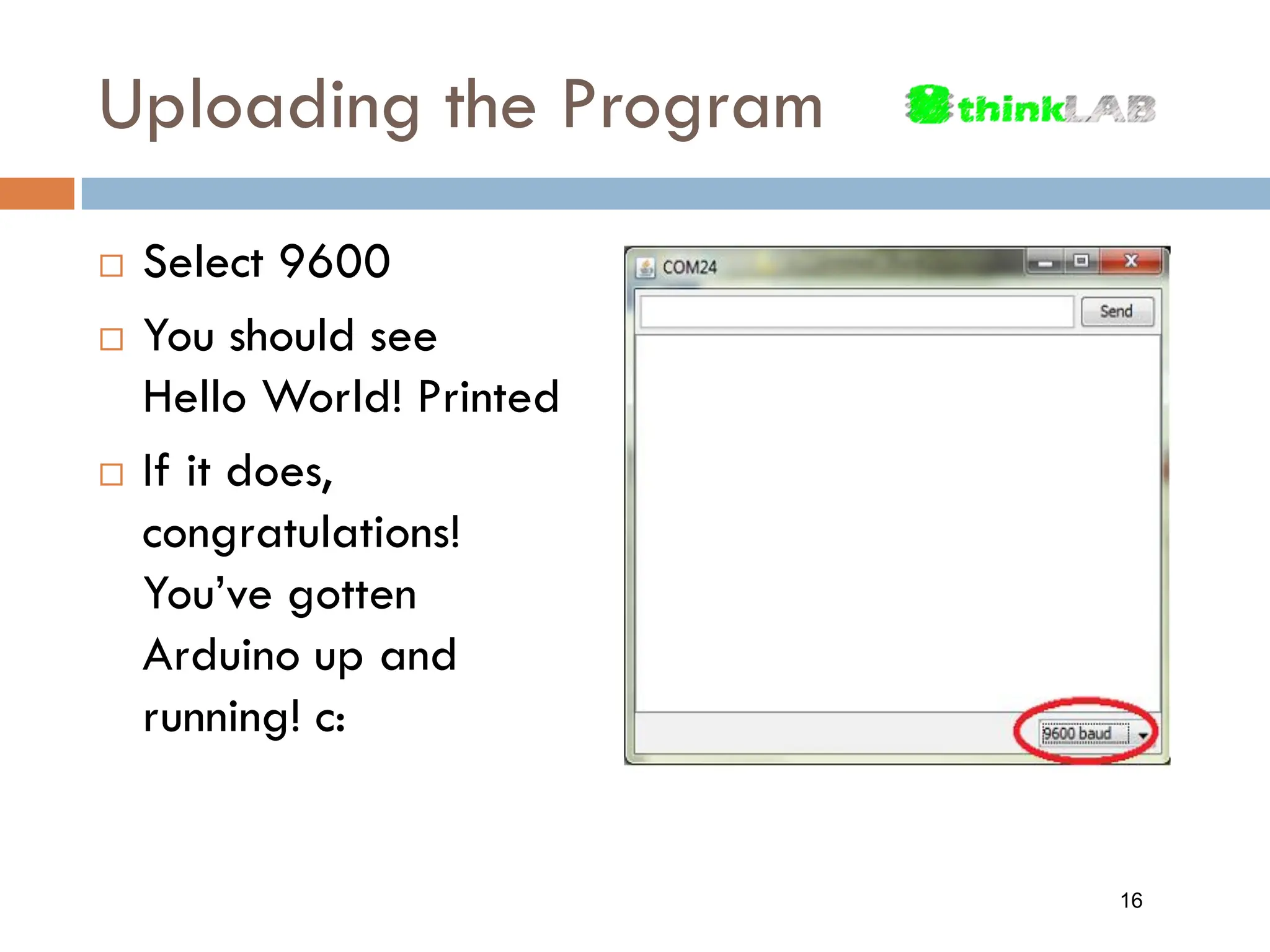
The document provides an overview of the Thinklab Workshop for Day 1 on Arduino Introduction and Fundamentals. It covers topics such as microcontrollers, the Arduino platform, getting started with Arduino, interfacing fundamentals including variables, control structures, logic, math commands, timing controls, random numbers, functions, and serial communications. Participants will learn about the Arduino IDE, uploading programs, digital and analog I/O, and using the serial monitor to send and receive data.
![Variables Array – a collection of variables of the same type accessed via a numerical index It is a series of variable instances placed adjacent in memory, and labeled sequentially with the index myArray[0] myArray[1] myArray[2] myArray[3] myArray[4] int myArray[5] 27](https://image.slidesharecdn.com/arduino-module1-240206060529-50bc3995/75/Arduino-Module-1-pdf-27-2048.jpg)