- SciPy - Home
- SciPy - Introduction
- SciPy - Environment Setup
- SciPy - Basic Functionality
- SciPy - Relationship with NumPy
- SciPy Clusters
- SciPy - Clusters
- SciPy - Hierarchical Clustering
- SciPy - K-means Clustering
- SciPy - Distance Metrics
- SciPy Constants
- SciPy - Constants
- SciPy - Mathematical Constants
- SciPy - Physical Constants
- SciPy - Unit Conversion
- SciPy - Astronomical Constants
- SciPy - Fourier Transforms
- SciPy - FFTpack
- SciPy - Discrete Fourier Transform (DFT)
- SciPy - Fast Fourier Transform (FFT)
- SciPy Integration Equations
- SciPy - Integrate Module
- SciPy - Single Integration
- SciPy - Double Integration
- SciPy - Triple Integration
- SciPy - Multiple Integration
- SciPy Differential Equations
- SciPy - Differential Equations
- SciPy - Integration of Stochastic Differential Equations
- SciPy - Integration of Ordinary Differential Equations
- SciPy - Discontinuous Functions
- SciPy - Oscillatory Functions
- SciPy - Partial Differential Equations
- SciPy Interpolation
- SciPy - Interpolate
- SciPy - Linear 1-D Interpolation
- SciPy - Polynomial 1-D Interpolation
- SciPy - Spline 1-D Interpolation
- SciPy - Grid Data Multi-Dimensional Interpolation
- SciPy - RBF Multi-Dimensional Interpolation
- SciPy - Polynomial & Spline Interpolation
- SciPy Curve Fitting
- SciPy - Curve Fitting
- SciPy - Linear Curve Fitting
- SciPy - Non-Linear Curve Fitting
- SciPy - Input & Output
- SciPy - Input & Output
- SciPy - Reading & Writing Files
- SciPy - Working with Different File Formats
- SciPy - Efficient Data Storage with HDF5
- SciPy - Data Serialization
- SciPy Linear Algebra
- SciPy - Linalg
- SciPy - Matrix Creation & Basic Operations
- SciPy - Matrix LU Decomposition
- SciPy - Matrix QU Decomposition
- SciPy - Singular Value Decomposition
- SciPy - Cholesky Decomposition
- SciPy - Solving Linear Systems
- SciPy - Eigenvalues & Eigenvectors
- SciPy Image Processing
- SciPy - Ndimage
- SciPy - Reading & Writing Images
- SciPy - Image Transformation
- SciPy - Filtering & Edge Detection
- SciPy - Top Hat Filters
- SciPy - Morphological Filters
- SciPy - Low Pass Filters
- SciPy - High Pass Filters
- SciPy - Bilateral Filter
- SciPy - Median Filter
- SciPy - Non - Linear Filters in Image Processing
- SciPy - High Boost Filter
- SciPy - Laplacian Filter
- SciPy - Morphological Operations
- SciPy - Image Segmentation
- SciPy - Thresholding in Image Segmentation
- SciPy - Region-Based Segmentation
- SciPy - Connected Component Labeling
- SciPy Optimize
- SciPy - Optimize
- SciPy - Special Matrices & Functions
- SciPy - Unconstrained Optimization
- SciPy - Constrained Optimization
- SciPy - Matrix Norms
- SciPy - Sparse Matrix
- SciPy - Frobenius Norm
- SciPy - Spectral Norm
- SciPy Condition Numbers
- SciPy - Condition Numbers
- SciPy - Linear Least Squares
- SciPy - Non-Linear Least Squares
- SciPy - Finding Roots of Scalar Functions
- SciPy - Finding Roots of Multivariate Functions
- SciPy - Signal Processing
- SciPy - Signal Filtering & Smoothing
- SciPy - Short-Time Fourier Transform
- SciPy - Wavelet Transform
- SciPy - Continuous Wavelet Transform
- SciPy - Discrete Wavelet Transform
- SciPy - Wavelet Packet Transform
- SciPy - Multi-Resolution Analysis
- SciPy - Stationary Wavelet Transform
- SciPy - Statistical Functions
- SciPy - Stats
- SciPy - Descriptive Statistics
- SciPy - Continuous Probability Distributions
- SciPy - Discrete Probability Distributions
- SciPy - Statistical Tests & Inference
- SciPy - Generating Random Samples
- SciPy - Kaplan-Meier Estimator Survival Analysis
- SciPy - Cox Proportional Hazards Model Survival Analysis
- SciPy Spatial Data
- SciPy - Spatial
- SciPy - Special Functions
- SciPy - Special Package
- SciPy Advanced Topics
- SciPy - CSGraph
- SciPy - ODR
- SciPy Useful Resources
- SciPy - Reference
- SciPy - Quick Guide
- SciPy - Cheatsheet
- SciPy - Useful Resources
- SciPy - Discussion
SciPy - Thresholding in Image Segmentation
Thresholding in image segmentation in SciPy is a fundamental technique used in image processing to separate different regions in an image based on pixel intensity values.
The basic idea is to apply a threshold to an image so that pixels with values above a certain threshold are classified into one group which often called foreground and those below are classified into another group which often called background.
In SciPy library the thresholding image segmentation is often implemented using the scipy.ndimage module along with the other libraries such as Matplotlib and Numpy for image processing. Here in this chapter we will see, thresholding image segmentation in detail.
Types of Thresholding in Image Segmentation
Thresholding is a key method in image processing used to segment an image by converting grayscale values into binary values. There different types of thresholding techniques that cater to various requirements based on the nature of the image as mentioned below −
Global Thresholding
Global thresholding is a simple and effective image segmentation technique where a single threshold value is used to classify pixels into two categories namely, foreground and background. In SciPy global thresholding can be achieved using basic array operations and tools from the scipy.ndimage module.
Following are the steps used to implement the Global thresholding in SciPy −
- Load or create an image.
- Define a global threshold value.
- Apply the threshold by comparing the image pixel values to the threshold.
- Finally, generate a binary mask where pixels above the threshold are classified as foreground True and pixels below are classified as background False.
Example
Here is a complete example of Global Thresholding using NumPy and Matplotlib to implement a Global thresholding operation −
import numpy as np import scipy.ndimage as ndi import matplotlib.pyplot as plt # Create a synthetic grayscale image np.random.seed(42) image = np.random.random((100, 100)) # Values between 0 and 1 # Define a global threshold value threshold_value = 0.5 # Apply global thresholding manually binary_image = image > threshold_value # Display the original and binary thresholded images fig, axes = plt.subplots(1, 2, figsize=(10, 5)) # Original image axes[0].imshow(image, cmap='gray') axes[0].set_title("Original Image") axes[0].axis("off") # Binary thresholded image axes[1].imshow(binary_image, cmap='gray') axes[1].set_title(f"Binary Thresholded Image (T = {threshold_value})") axes[1].axis("off") plt.tight_layout() plt.show() Below is the output of the Global thresholding of the image segmentation implemented with the help Numpy and Matplotlib libraries −

Otsu's Thresholding
Otsu's Thresholding is a global thresholding technique that determines the optimal threshold value for an image by maximizing the variance between the foreground and background classes. This method assumes that the image has a bimodal histogram i.e., two distinct peaks representing background and foreground.
The main objective of this method is to find the threshold T that minimizes the intra-class variance or equivalently maximizes the inter-class variance.
Example
Otsus Thresholding is not directly implemented in SciPy but we can achieve it by using a combination of SciPy's histogram functionality and NumPy for calculations. Below is the example which gives step-by-step approach of how to implement Otsu's Thresholding in SciPy −
import numpy as np import scipy.ndimage as ndi import matplotlib.pyplot as plt def otsu_threshold(image): """ Computes Otsu's threshold for a grayscale image. Parameters: image (ndarray): Input grayscale image (2D array). Returns: threshold (float): Optimal threshold value. """ # Compute the histogram of the image hist, bin_edges = np.histogram(image.ravel(), bins=256, range=(0, 1)) bin_centers = (bin_edges[:-1] + bin_edges[1:]) / 2 # Total number of pixels total_pixels = image.size # Cumulative sums and cumulative means cumulative_sum = np.cumsum(hist) cumulative_mean = np.cumsum(hist * bin_centers) # Global mean global_mean = cumulative_mean[-1] / total_pixels # Between-class variance numerator = (global_mean * cumulative_sum - cumulative_mean) ** 2 denominator = cumulative_sum * (total_pixels - cumulative_sum) between_class_variance = numerator / (denominator + 1e-10) # Add epsilon to avoid division by zero # Find the maximum of between-class variance optimal_idx = np.argmax(between_class_variance) optimal_threshold = bin_centers[optimal_idx] return optimal_threshold # Generate a synthetic grayscale image (random noise for demonstration) np.random.seed(0) image = np.random.random((100, 100)) # Apply Otsu's thresholding optimal_threshold = otsu_threshold(image) thresholded_image = image > optimal_threshold # Display the original and thresholded images fig, ax = plt.subplots(1, 2, figsize=(10, 5)) ax[0].imshow(image, cmap='gray') ax[0].set_title("Original Image") ax[0].axis('off') ax[1].imshow(thresholded_image, cmap='gray') ax[1].set_title(f"Thresholded Image\n(Otsu's Threshold = {optimal_threshold:.2f})") ax[1].axis('off') plt.tight_layout() plt.show() Below is the output of implementing the Otsu thresholding −

Adaptive Thresholding
Adaptive Thresholding is a thresholding technique where the threshold value varies across the image by depending on local image properties. This method is particularly useful for images with uneven lighting or varying intensity levels where a single global threshold would fail to segment the image properly.
Following are the steps involved in implementing the Adaptive Thresholding −
- Divide the Image into Local Regions: The image is analyzed in small neighborhoods or regions instead of globally.
- Calculate Local Statistics: Compute a local threshold for each pixel based on the statistics e.g., mean or Gaussian-weighted mean of the surrounding region.
- Threshold Each Pixel: Classify pixels as foreground or background based on the locally computed threshold.
Example
Here is an example using SciPy's tools to implement adaptive thresholding using a local mean filter −
import numpy as np import scipy.ndimage as ndi import matplotlib.pyplot as plt # Create a synthetic image with uneven lighting np.random.seed(0) x, y = np.meshgrid(np.linspace(0, 1, 100), np.linspace(0, 1, 100)) image = np.sin(10 * x * y) + np.random.random((100, 100)) * 0.5 # Apply a local mean filter window_size = 15 # Size of the local region local_mean = ndi.uniform_filter(image, size=window_size) # Perform adaptive thresholding thresholded_image = image > local_mean # Display the results fig, ax = plt.subplots(1, 3, figsize=(15, 5)) ax[0].imshow(image, cmap='gray') ax[0].set_title("Original Image") ax[0].axis('off') ax[1].imshow(local_mean, cmap='gray') ax[1].set_title("Local Mean") ax[1].axis('off') ax[2].imshow(thresholded_image, cmap='gray') ax[2].set_title("Adaptive Thresholded Image") ax[2].axis('off') plt.tight_layout() plt.show() 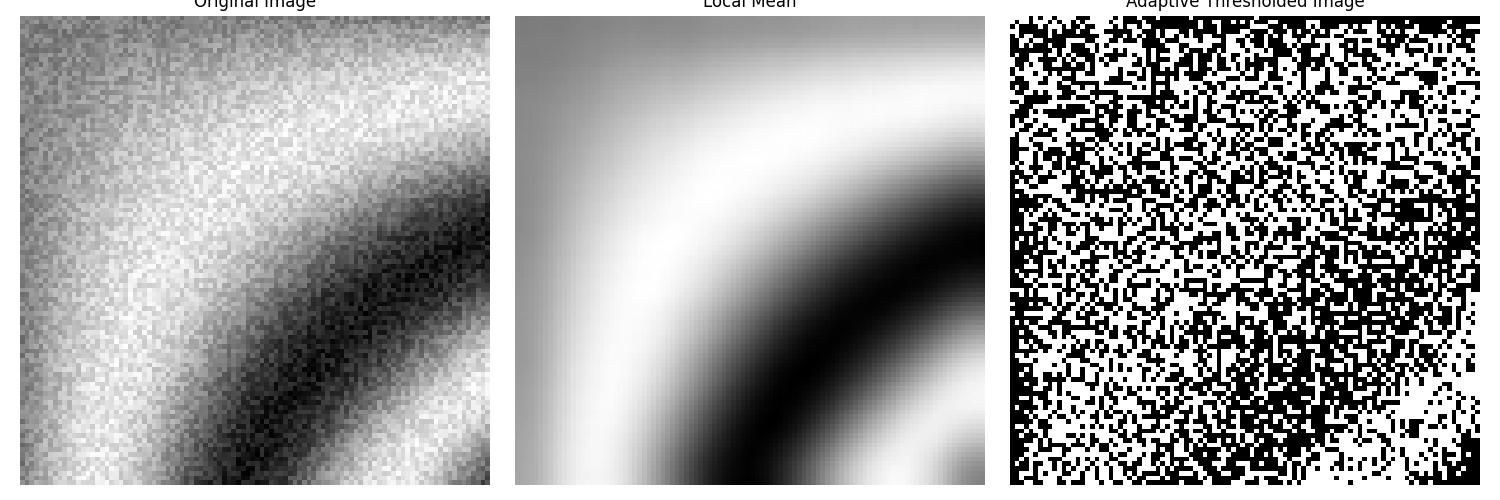
Advanced Adaptive Thresholding Technique
For more advanced adaptive thresholding technique we can use a Gaussian-weighted mean instead of a simple mean. Below is the example of the advanced adaptive thresholding technique −
import numpy as np import scipy.ndimage as ndi import matplotlib.pyplot as plt # Create a synthetic image with uneven lighting np.random.seed(0) x, y = np.meshgrid(np.linspace(0, 1, 100), np.linspace(0, 1, 100)) image = np.sin(10 * x * y) + np.random.random((100, 100)) * 0.5 # Apply a local Gaussian filter sigma = 5 # Standard deviation for Gaussian kernel local_gaussian_mean = ndi.gaussian_filter(image, sigma=sigma) # Perform adaptive thresholding thresholded_image_gaussian = image > local_gaussian_mean # Display results fig, ax = plt.subplots(1, 2, figsize=(10, 5)) ax[0].imshow(local_gaussian_mean, cmap='gray') ax[0].set_title("Local Gaussian Mean") ax[0].axis('off') ax[1].imshow(thresholded_image_gaussian, cmap='gray') ax[1].set_title("Gaussian Adaptive Thresholded Image") ax[1].axis('off') plt.tight_layout() plt.show() Below is the output of the advanced adapative filtering −
