The objective of path planning algorithms is to find the optimal path from a source position to a target position. This paper proposes a real-time path planner for UAVs based on the genetic algorithm. The proposed approach does not identify any specific points outside or between obstacles to solve the problems of the invisible path. In addition, this approach uses no additional steps in the genetic algorithm to handle the problems resulting from generating points inside the obstacles, or the intersection between path segments with obstacles. For these reasons, this paper introduces a simple evaluation method that takes into account the intersections between the path segments and obstacles to find a collision-free and near to optimal path. This evaluation method take into account overlapped and intersected obstacles. The sequential implementation for all of the genetic algorithm steps is detailed. This paper explores the Parallel Genetic Algorithms (PGA) models and introduces the parallel implementation of the proposed path planner on multi-core processors using OpenMP. The execution time of the proposed parallel implementation is reduced compared to sequential execution.
![International Journal of Computational Science and Information Technology (IJCSITY) Vol. 10, No. 2, May 2022 DOI : 10.5121/ijcsity.2022.10201 1 UAV PATH PLANNING USING GENETIC ALGORITHMWITH PARALLEL IMPLEMENTATION Mohammad AlRaslan and Ahmad Hilal AlKurdi Faculty of Informatics Engineering, Idleb University, Idleb, Syria ABSTRACT The objective of path planning algorithms is to find the optimal path from a source position to a target position. This paper proposes a real-time path planner for UAVs based on the genetic algorithm. The proposed approach does not identify any specific points outside or between obstacles to solve the problems of the invisible path. In addition, this approach uses no additional steps in the genetic algorithm to handle the problems resulting from generating points inside the obstacles, or the intersection between path segments with obstacles. For these reasons, this paper introduces a simple evaluation method that takes into account the intersections between the path segments and obstacles to find a collision-free and near to optimal path. This evaluation method take into account overlapped and intersected obstacles. The sequential implementation for all of the genetic algorithm steps is detailed. This paper explores the Parallel Genetic Algorithms (PGA) models and introduces the parallel implementation of the proposed path planner on multi-core processors using OpenMP. The execution time of the proposed parallel implementation is reduced compared to sequential execution. KEYWORDS Path planning, UAV, Genetic algorithm, Parallel genetic algorithm, OpenMP, Speed up. 1. INTRODUCTION In recent years, Unmanned Aerial Vehicle (UAV) and Unmanned Ground Vehicle (UGV) Path planningalgorithms become important research topics. These algorithms should find an optimal path between start and target positions. There are two main types of path planning algorithms: global path planning (offline path planning) and local path planning (online path planning) [1–3]. Many studies have detailedand classified path planning algorithms into several categories [4, 5]. Genetic Algorithm (GA) is one of the widely used algorithms for path planning [3]. Many studies implemented GA for UAV path planning and tried to give a collision-free path, where all of the path segments don’t intersect with any obstacle on the map. To avoid an obstacle on the map, many studies suggest to identify specific pointsoutside or between obstacles as crossing points. These points are either randomly generated or at specific locations around the obstacle. Randomly generated points may not be outside the obstacle, and points around obstacles may not give a collision-free path, especially if the obstacles are close to each other or intersect with each other. Other researchers used additional steps in GA to solve the problems resulting from generating points inside the obstacles, or the intersection between the path segments withobstacles. In [6], the Escape operator was introduced in GA for the waypoints that are generated inside the sensing area of radar (obstacle). The solution was to move these waypoints to other positions away from the radar sensing area to get a collision-free path. This means repeating random generation of new waypoints, with condition (if point outside all of obstacles, then …), to reach free waypoint outside obstacles. An Escape method is also presented in [7], with Simulated](https://image.slidesharecdn.com/10222ijcsity01-250806095829-e8701474/75/UAV-Path-Planning-using-Genetic-Algorithm-with-Parallel-Implementation-1-2048.jpg)
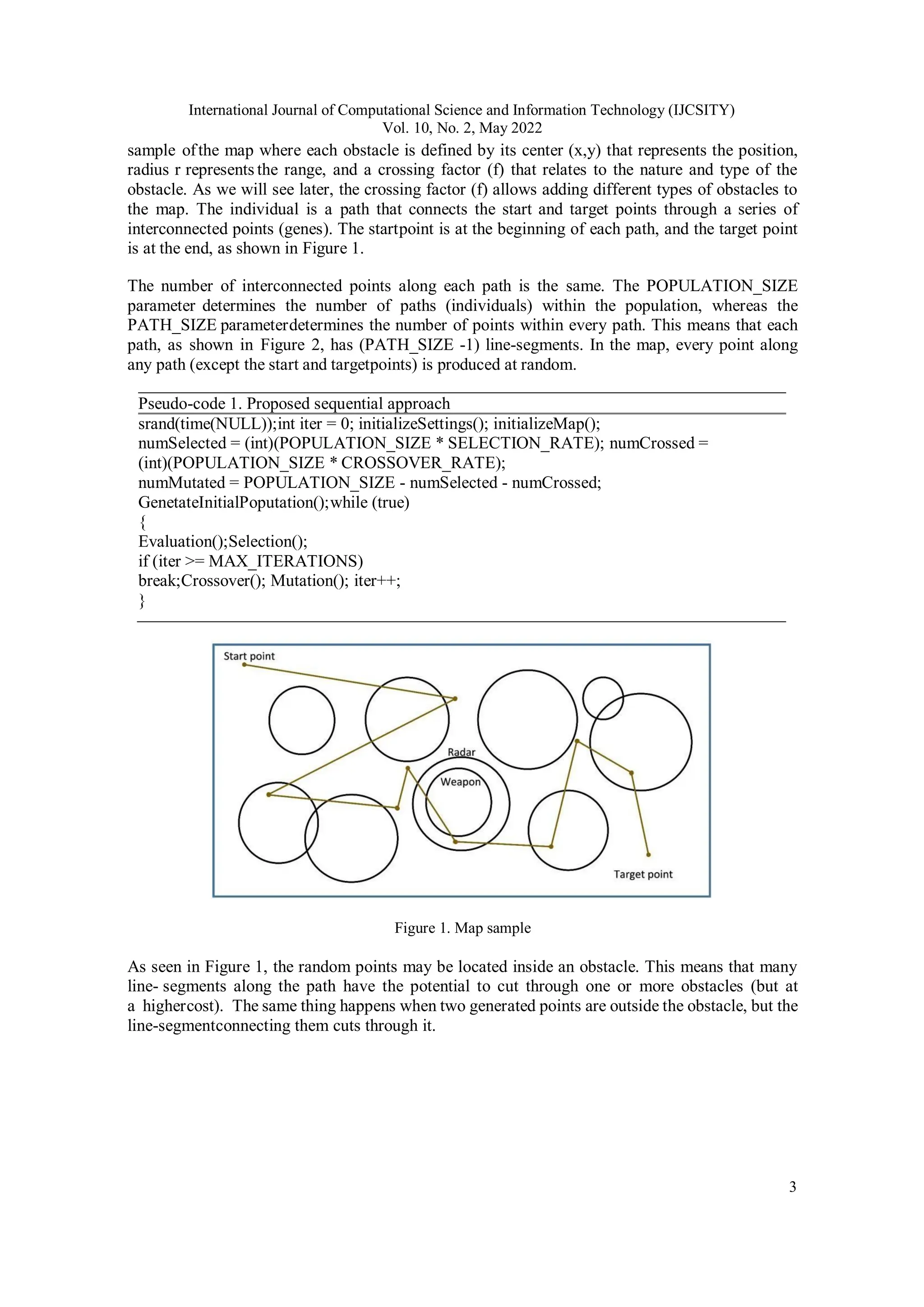
![International Journal of Computational Science and Information Technology (IJCSITY) Vol. 10, No. 2, May 2022 2 Annealing algorithm. The corner points of a square that covers the threatening radar area (obstacle) are used as crossing points to avoid obstacles. Authors in [8] gave improved GA for path planning. They presented three kinds of path planning schemes: Directly through, Insertion through, and Bypass through. When the path intersects with the threatening region (obstacle), these schemes choose a free path by determining specific pointsfor crossing (mid-point between two threatened zone, or a vertex of threatened zone). The improved GA in [8], has been modified in [9]. Likewise, the authors relied on that the path is feasible when all the guidance points are feasible. An avoiding technique was proposed in [10], by adding eight virtual points as crossing points. These points are placed in the orbit of the radar with a 45° angle. Simulated Annealing algorithm is used in [11], and two methods are introduced to give a good optimal solution that at the same time avoids circular radar threats (2-Opt method and two nodes random swapping method). The 2-Opt method stops at a point where it cannot improve the path because of the radar areas.The resulted path was not optimal in some of the cases when the number of radar threats is high (6-8). Authors in [12] used GA and presented a Forbidden Zone avoidance technique. The Forbidden Zone’s shape is assumed as a square type. This technique relies on covering the Forbidden Zones with the Guard Zones. When the path is invisible, specific points are used (one or two Guard Zones corner points) and added to the path. The researcher mention that this technique works when there is no overlapbetween the Forbidden Zones. Furthermore, most current path planning studies did not stop at just presenting the algorithm model; they also provided a parallel model for this algorithm to achieve real-time path planning. This paper proposes an approach for real-time UAV path planning. This approach deals with all points in search space as a crossable point. We discuss all GA steps and introduce a simple evaluation methodto find a collision-free and near to optimal path. This method takes into account the intersection states between the path segments and the obstacles. In addition, it does not specify any points on the map to solve the problems of the invisible path. The evaluation method deals with intersected or overlapped obstacles. After that, we detail how we achieved parallelism on multi-core systems. We present the Parallel Genetic Algorithms (PGA) and its implementation models and discuss implementation details of this approach on multicore architecture using OpenMP. We compare the sequential time with the parallel time and introduce the speed up. The remainder of this paper is organized as follows: Section 2 introduces GA principles and contains the proposed sequential approach for path planning. Section 3 deals with parallel computing, OpenMP, and parallel genetic algorithm (PGA). Section 4 presents the proposed parallel implementation. Section 5 focuses on simulation and experimental results. Finally, we conclude the paper in Section 6. 2. PROPOSED SEQUENTIAL APPROACH This section introduces all proposed GA steps for path planning. GA is usually started with a populationof individuals (chromosomes). Each individual is made up of a set of genes. The first task in GA is to figure out how to describe the environment, represent individuals, and calculate fitness. Following that,GA begins to develop solutions utilizing the following steps: crossover, mutation, and selection. Pseudo-code 1, describes the GA steps in our code. These steps are repeated until satisfying a condition,which is the number of iterations. 2.1. Environment modelling and chromosome encoding We propose the environment as a 2-D map, with several circular obstacles. These obstacles may represent a radar sensing range, enemy weapon zones, or difficult terrain. Figure 1, shows a](https://image.slidesharecdn.com/10222ijcsity01-250806095829-e8701474/75/UAV-Path-Planning-using-Genetic-Algorithm-with-Parallel-Implementation-2-2048.jpg)
![International Journal of Computational Science and Information Technology (IJCSITY) Vol. 10, No. 2, May 2022 4 Figure 2. Population and individual representation Table 1 gives the parameters of the genetic algorithm and the map. All of these parameters are initializedat the beginning of the algorithm. Table 1. The parameters of GA and the map parameter significance POPULATION_SIZE the number of individuals (paths) in population PATH_SIZE the number of the points in every path MAX_ITERATIONS the maximum number of repetitions in GA while loop SELECTION_RATE selection rate CROSSOVER_RATE crossover rate MUTATION_RATE mutation rate MaxX the maximum value on the X-axis MaxY the maximum value on the Y-axis source the source point target the target point obstacles[] an array of obstacles 2.2. Generating initial population The first step in GA is to generate the initial population. Paths within the initial population are createdat random. As illustrated in Figure 2, we need to generate (PATH_SIZE-2) random points for each pathbetween start and target points (𝑃1 → 𝑃PATH_SIZE − 2 ). Pseudo-code 2. Generating initial population void GenetateInitialPoputation() { for (int i = 0; i < POPULATION_SIZE; i++) { myPop[i].path[0] = myMap->source; for (int j = 1; j < PATH_SIZE - 1; j++) { myPop[i].path[j] = getRandomPoint(); } myPop[i].path[PATH_SIZE - 1] = myMap->dist; } } Generating a random point is achieved by generating its coordinate (x,y) on the map. These](https://image.slidesharecdn.com/10222ijcsity01-250806095829-e8701474/75/UAV-Path-Planning-using-Genetic-Algorithm-with-Parallel-Implementation-4-2048.jpg)
![International Journal of Computational Science and Information Technology (IJCSITY) Vol. 10, No. 2, May 2022 5 coordinates are specified in the [0, MaxX] and [0,MaxY] ranges on X-axis and Y-axis, respectively. The rand() andsrand() functions in the C++ language can be used to generate random numbers. Pseudo-code 2 includesthe generating initial population step. 2.3. Evaluation As mentioned earlier, path points are generated at random inside the map. This means that some pointscan be placed within the obstacles. In addition, two neighbouring points can be outside the obstacle, while the line-segment connecting them cuts through the obstacle. In this study, and depending on the previous assumptions, the fitness function evaluates the path in two aspects: basic cost and crossing cost, as illustrated in Eqn. 1 and Eqn. 2. 𝑡𝑜𝑡𝑎𝑙 𝑐𝑜𝑠𝑡(𝑓𝑖𝑡𝑛𝑒𝑠𝑠) = 𝑏𝑎𝑠𝑖𝑐 𝑐𝑜𝑠𝑡 + 𝑐𝑟𝑜𝑠𝑠𝑖𝑛𝑔 𝑐𝑜𝑠𝑡 (1) The basic cost is the path’s length. To put it another way, the path's length is the sum of the lengths of the line-segments that make it up. Euclidean distance is used to calculate the distance between two points. The crossing cost is calculated for line-segments within the path that travelled across one or more obstacles. The crossing cost relates to the crossing distance within the obstacle and a factor f. Thisfactor relates to the nature and type of the obstacle, where there is a possibility to add different type ofobstacles (in crossing cost) to the map, and to deal with overlapped or intersected obstacles. 𝑛−1 𝑚−1 𝐹𝑖𝑡𝑛𝑒𝑠𝑠(𝑝𝑎𝑡ℎ𝑘) = ∑ ( 𝐷𝑖𝑠𝑡𝑎𝑛𝑐𝑒(𝑃𝑖, 𝑃𝑖+1) + ∑ 𝑓𝑗 ∗ 𝐶𝑟𝑜𝑠𝑖𝑛𝑔𝐶𝑜𝑠𝑡(𝑃𝑖, 𝑃𝑖+1, 𝑂𝑗)) 𝑖=0 𝑗=0 (2) Where: n: is the number of line-segments in each path (individual). m: is the number of obstacles on the map. 𝑓𝑖𝑡𝑛𝑒𝑠𝑠(𝑝𝑎𝑡ℎ𝑘): denotes the total cost (fitness) of the Kth path, which represents the Kth individual in the population. 𝐷𝑖𝑠𝑡𝑎𝑛𝑐𝑒(𝑃𝑖, 𝑃𝑖+1): is the Euclidian distance between the two points 𝑃𝑖, 𝑃𝑖+1 within the path. 𝐶𝑟𝑜𝑠𝑖𝑛𝑔𝐶𝑜𝑠𝑡(𝑃𝑖, 𝑃𝑖+1, 𝑂𝑗): refers to the crossing cost when line-segment (𝑃𝑖, 𝑃𝑖+1) crossed through the obstacle (𝑂𝑗). 𝑓𝑗: is a factor that depends on the type of obstacle 𝑂𝑗 and the issue at hand Figure 3 explains the intersection states between a line-segment and the obstacle that is represented bya circle. Calculating the crossing distance has many cases based on these states. In the first state, Figure3 (a), there are two intersection points 𝐼1, 𝐼2. The crossing cost is the distance from 𝐼1 to 𝐼2 multiplied by the factor f. Based on Eqn. 2, the overall crossing cost for the line- segment (𝑃1,𝑃2) is calculated foreach obstacle 𝑂𝑗.](https://image.slidesharecdn.com/10222ijcsity01-250806095829-e8701474/75/UAV-Path-Planning-using-Genetic-Algorithm-with-Parallel-Implementation-5-2048.jpg)


![International Journal of Computational Science and Information Technology (IJCSITY) Vol. 10, No. 2, May 2022 8 Pseudo-code 4. Evaluation step void Evaluation() { for (int i = 0; i < POPULATION_SIZE; i++) { for (int j = 0; j < PATH_SIZE - 1; j++) { BasicCostOnePath+=EuclideanDistance (myPop[i].path[j], myPop[i].path[j + 1]); CrossingCostOnePath+=CrossingCostInAllObstacles(myPop[i].path[j], myPop[i].path[j + 1]); } TotalCostOnePath = BasicCostOnePath + CrossingCostOnePath;myPop[i].Fitness = TotalCostOnePath; BasicCostOnePath=TotalCostOnePath=CrossingCostOnePath=0; } } 2.4. Selection The selection step's goal is to choose the best individuals for the next generation. In this work, the rankselection method is employed. Firstly, all individuals are sorted in descending order, with the fitness value as the sort key. Then they are selected (saved) to the new population. (SELECTION RATE*POPULATION SIZE) determines the number of selected paths. The sorting algorithm has an impact on GA's execution time. MergeSort, which has a time complexity of 𝑂(𝑛 log 𝑛), is employed inthe sequential implementation. 2.5. Crossover The crossover process combines two paths into a new child path. A single-point crossover is employed. A random number is generated to indicate a position in the parent’s path (from 1 to PATH_SIZE–3). Path points are exchanged between these parents according to this position to generate a child’s path. The two paths for crossover operation are chosen at random from the selected paths. During the experiments, the same parent is likely to be chosen twice for the same crossover process. Therefore, we adopted the production of a single child from the crossover process to reduce the frequency of identicalindividuals within the new population. The crossover probability is defined by the CROSSOVER_RATE parameter, and the number of child paths resulting from crossover is defined by(CROSSOVER_RATE * POPULATION_SIZE). Pseudo- code 5, describes the crossover step in the proposed approach. Pseudo-code 5. Crossover step void Crossover() { for (int i = 0; i < numCrossed; i++) { int r1 = random_num(0, numSelected - 1); int r2 = random_num(0, numSelected - 1); index = i + numSelected; myPop[index] = CrosserInOnePosition(myPop[r1], myPop[r2]); } }](https://image.slidesharecdn.com/10222ijcsity01-250806095829-e8701474/75/UAV-Path-Planning-using-Genetic-Algorithm-with-Parallel-Implementation-8-2048.jpg)
![International Journal of Computational Science and Information Technology (IJCSITY) Vol. 10, No. 2, May 2022 9 2.6. Mutation The mutation step helps in increasing the population diversity. The mutation operation on a path is performed by choosing a random position in this path (from 1 to PATH_SIZE - 2). Then, replace the point in this position with a randomly generated point. The random path for mutation operation is chosenfrom selected and crossed paths. The mutation probability is defined by the MUTATION_RATE parameter, and the number of mutated paths is defined by (MUTATION_RATE *POPULATION_SIZE). Pseudo-code 6, describes the mutation step in the proposed approach. Pseudo-code 6. Mutation step void Mutation() { int index; for (int i = 0; i < numMutated; i++) { int r = random_num(0, numSelected + numCrossed - 1);index = i + numSelected + numCrossed; myPop[index] = mutatIndividual(myPop[r]); } } 3. PARALLEL GENETIC ALGORITHM The simultaneous usage of many compute resources to solve a computational problem is known as parallel computing. Flynn's taxonomy was refined to divide computer system architectures into shared- memory systems, distributed-memory systems, and hybrid systems based on memory structure [13, 14].In recent years, various tools, such as OpenMP, have been available to help the programmer in converting sequential algorithms into parallel. OpenMP stands for open multiprocessing. It is a standard application programming interface (API) thatprovides a portable, scalable model for shared memory parallel applications [13–15]. Fortran and C/C++ have both implemented this standard. OpenMP is made up of a set of compilers directives, function libraries, and environment variables. It works based on a fork-join concept. A program in the OpenMP environment has sequential and parallel regions. The master thread starts executing sequentially after launching the program until the compiler encounters a parallel region directive. Then,a team of threads is created, and start execution simultaneously. As explained previously, the GA should be implemented in a parallel style to achieve real-time path planning and overcome the GA's computational drawback. Many studies, such as [16–18], have discussed the Parallel Genetic Algorithm (PGA). These researches focus on models, hardware architectures, APIs, and middleware used to implement PGAs. There are three main types of PGA: Master-slave, Fine-grained, and Coarse-grained [18, 19]. In the master-slave model, there is a single population, and all GA steps are applied sequentially, except for the evaluation step that is performed in parallel. Many studies have detailed implementing PGA in shared memory multi-core computers. In [20], they implemented their solution on a multi-core system using MATLAB. The PGA is also implemented for Design Space Exploration using OpenMP, as in [21]. Other researches present how tospeed up GA using OpenMP on multicore processors [22, 23]. Java concurrent programming has beenused in many researches to implement GA in multicore parallelism [24, 25].](https://image.slidesharecdn.com/10222ijcsity01-250806095829-e8701474/75/UAV-Path-Planning-using-Genetic-Algorithm-with-Parallel-Implementation-9-2048.jpg)
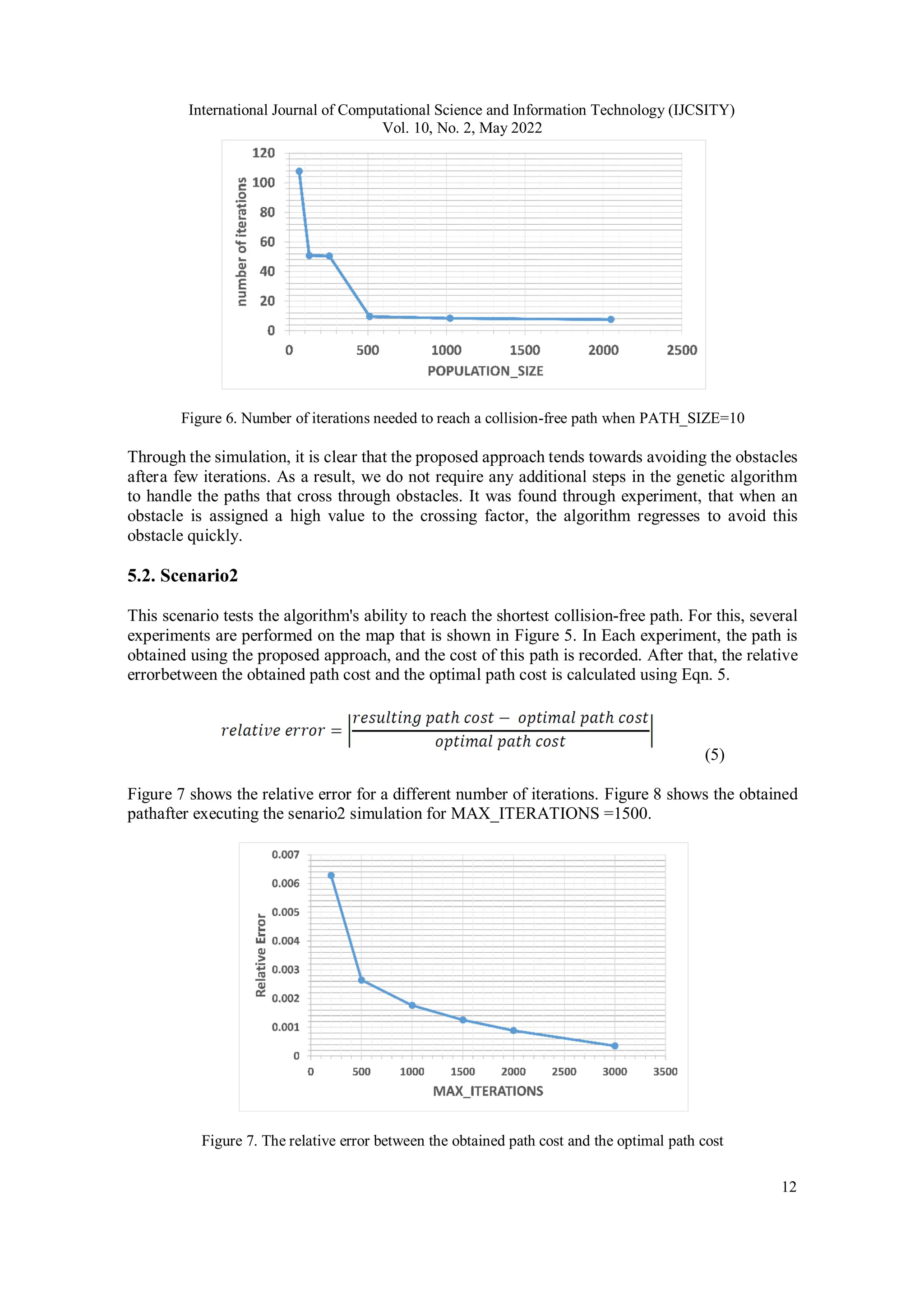
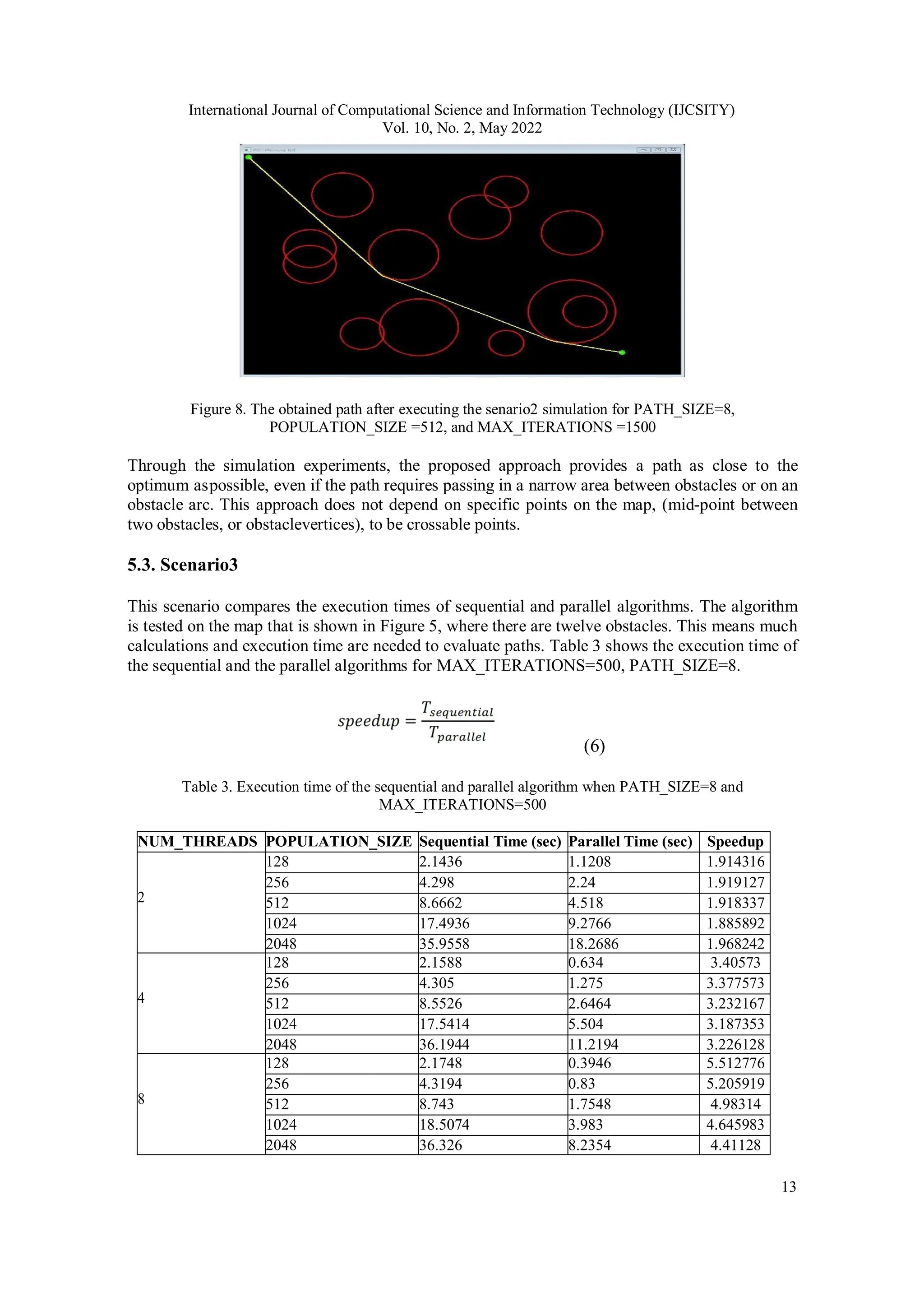
![International Journal of Computational Science and Information Technology (IJCSITY) Vol. 10, No. 2, May 2022 11 sequence and the sequence of comparison does not depend on data. As a result, it takes less computation time in parallel implementation compared to sequential [26]. 5. SIMULATION AND EXPERIMENTAL RESULTS In this section, simulation and experimental results are introduced in three scenarios. For some parameters, the value will be the same across all experiments (SELECTION_RATE=0.4, CROSSOVER_RATE=0.5, and MUTATION_RATE=0.1). The crossing factor (𝑓𝑗) is assigned a different value for each obstacle. These values fall within the range [4.5-9.5]. The simulation isperformed on a PC with a 2.2GHz Intel Core i7-G8 processor. Figure 5. Map sample 5.1. Scenario1 The goal of this scenario is to test the algorithm's ability to find a collision-free path that avoids all obstacles on the map. We find out the number of iterations needed by the algorithm to get this path. Wedon't care about the path cost in this scenario. GA repeats its steps in a loop. In each iteration, we test the best path within the population that the algorithm has found in the current iteration. However, we test the intersection of this best path with all obstacles on the map. If this path is collision-free and does not intersect with any obstacle, we exit the loop and record the current iteration at which we exited. Scenario1 was tested on the map that is displayed in Figure 5. Figure 6 shows the number of iterations required by the proposed approaches to reach a collision-free path for PATH_SIZE=10 and different values of POPULATION_SIZE.](https://image.slidesharecdn.com/10222ijcsity01-250806095829-e8701474/75/UAV-Path-Planning-using-Genetic-Algorithm-with-Parallel-Implementation-11-2048.jpg)
![International Journal of Computational Science and Information Technology (IJCSITY) Vol. 10, No. 2, May 2022 14 Figure 9. Speedup achieved by parallel implementation Through the simulation, it clearly appears that the parallel implementation achieves a reasonable acceleration relative to the number of threads. 6. CONCLUSION AND FUTURE WORK In This paper, we proposed a real-time path planner for UAVs based on genetic algorithm. An evaluation method was introduced here to reach the best path that avoids obstacles. All of the genetic stages for path planning were given in details. Three scenarios of simulation experiments were presented to prove that this approach tends towards providing a collision-free path that is close to optimum. Parallel implementation for each step was detailed using OpenMP, and the speedup was achieved to get fast path planning. For future works, the circular constructions could be used to smooth the final path. In addition, for parallel implementation, GPGPU will get more speedup. ACKNOWLEDGEMENT The authors would like to thank everyone who have extended his support for successful completion ofthis work. REFERENCES [1] Karur, K., Sharma, N., Dharmatti, C., & Siegel, J. E. (2021). A Survey of Path Planning Algorithms for Mobile Robots. Vehicles 2021, Vol. 3, Pages 448-468, 3(3), 448–468. https://doi.org/10.3390/VEHICLES3030027 [2] Pandey, A. (2017). Mobile Robot Navigation and Obstacle Avoidance Techniques: A Review. International Robotics & Automation Journal, 2(3), 96–105. https://doi.org/10.15406/iratj.2017.02.00023 [3] Zhang, H. Y., Lin, W. M., & Chen, A. X. (2018). Path planning for the mobile robot: A review. Symmetry, 10(10). https://doi.org/10.3390/sym10100450 [4] Ayawli, B. B. K., Chellali, R., Appiah, A. Y., & Kyeremeh, F. (2018). An Overview of Nature- Inspired, Conventional, and Hybrid Methods of Autonomous Vehicle Path Planning. Journal of Advanced Transportation, 2018. https://doi.org/10.1155/2018/8269698 [5] Patle, B. K., Babu L, G., Pandey, A., Parhi, D. R. K., & Jagadeesh, A. (2019). A review: On path planning strategies for navigation of mobile robot. Defence Technology, 15(4), 582–606. https://doi.org/10.1016/j.dt.2019.04.011 [6] Fu, S. Y., Han, L. W., Tian, Y., & Yang, G. S. (2012). Path planning for unmanned aerial vehicle based on genetic algorithm. Proceedings of the 11th IEEE International Conference on Cognitive](https://image.slidesharecdn.com/10222ijcsity01-250806095829-e8701474/75/UAV-Path-Planning-using-Genetic-Algorithm-with-Parallel-Implementation-14-2048.jpg)
![International Journal of Computational Science and Information Technology (IJCSITY) Vol. 10, No. 2, May 2022 15 Informatics and Cognitive Computing, ICCI*CC 2012, 140–144. https://doi.org/10.1109/ICCI- CC.2012.6311139 [7] Turker, T., Sahingoz, O. K., & Yilmaz, G. (2015). 2D path planning for UAVs in radar threatening environment using simulated annealing algorithm. 2015 International Conference on Unmanned Aircraft Systems, ICUAS 2015, 56–61. https://doi.org/10.1109/ICUAS.2015.7152275 [8] Wang, Y., & Chen, W. (2014). Path planning and obstacle avoidance of unmanned aerial vehicle based on improved genetic algorithms. Proceedings of the 33rd Chinese Control Conference, CCC 2014, 8612– 8616. https://doi.org/10.1109/ChiCC.2014.6896446 [9] Tao, J., Zhong, C., Gao, L., & Deng, H. (2016). A study on path planning of unmanned aerial vehicle based on improved genetic algorithm. Proceedings - 2016 8th International Conference on Intelligent Human-Machine Systems and Cybernetics, IHMSC 2016, 2, 392–395. https://doi.org/10.1109/IHMSC.2016.182 [10] Özalp, N., Sahingöz, Ö. K., Ayan, U., & Ak, T. (2013). Autonomous Unmanned Aerial Vehicle Route Planning. 2013 21st Signal Processing and Communications Applications Conference, SIU 2013, 6–9. https://doi.org/10.1109/SIU.2013.6531559 [11] Basbous, B. (2019). 2D UAV Path Planning with Radar Threatening Areas using Simulated Annealing Algorithm for Event Detection. 2018 International Conference on Artificial Intelligence and Data Processing, IDAP 2018, 1–7. https://doi.org/10.1109/IDAP.2018.8620881 [12] Cakir, M. (2015). 2D path planning of UAVs with genetic algorithm in a constrained environment. 6th International Conference on Modeling, Simulation, and Applied Optimization, ICMSAO 2015 - Dedicated to the Memory of Late Ibrahim El-Sadek. https://doi.org/10.1109/ICMSAO.2015.7152235 [13] Kurgalin, S., & Borzunov, S. (2019). A practical approach to high-performance computing. A Practical Approach to High-Performance Computing. Springer International Publishing. https://doi.org/10.1007/978-3-030-27558-7 [14] Barlas, G. (2014). Multicore and GPU programming: An integrated approach. Multicore and GPU Programming: An Integrated Approach, 1–698. https://doi.org/10.1016/C2013-0-06820-X [15] Kale, V. (2019). Parallel Computing Architectures and APIs. Parallel Computing Architectures and APIs. CRC Press LLC. https://doi.org/10.1201/9781351029223 [16] Harada, T., & Alba, E. (2020). Parallel Genetic Algorithms: A Useful Survey. ACM Computing Surveys, 53(4). https://doi.org/10.1145/3400031 [17] K., R., S., B., & Mohanty, J. (2017). An overview of GA and PGA. International Journal of Computer Applications, 178(6), 7–9. https://doi.org/10.5120/ijca2017915829 [18] Talbi, E. G. (2015). Parallel evolutionary combinatorial optimization. Springer Handbook of Computational Intelligence, 1107–1125. https://doi.org/10.1007/978-3-662-43505-2_55 [19] Luque, G., & Alba, E. (2011). Parallel Models for Genetic Algorithms, (0), 15–30. https://doi.org/10.1007/978-3-642-22084-5_2 [20] Roberge, V., Tarbouchi, M., & Labonte, G. (2013). Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning. IEEE Transactions on Industrial Informatics, 9(1), 132–141. https://doi.org/10.1109/TII.2012.2198665 [21] Muttillo, V., Giammatteo, P., Fiorilli, G., & Pomante, L. (2020). An OpenMP Parallel Genetic Algorithm for Design Space Exploration of Heterogeneous Multi-processor Embedded Systems. PervasiveHealth: Pervasive Computing Technologies for Healthcare, (January). https://doi.org/10.1145/3381427.3381431 [22] Herda, M. (2017). Parallel Genetic Algorithm for Capacitated P-median Problem. Procedia Engineering, 192(4), 313–317. https://doi.org/10.1016/j.proeng.2017.06.054 [23] J. Umbarkar, A., & S. Joshi, M. (2013). Dual Population Genetic Algorithm (GA) versus OpenMP GA for Multimodal Function Optimization. International Journal of Computer Applications, 64(19), 29–36. https://doi.org/10.5120/10744-5516 [24] Sahingoz, O. K. (2014). Generation of bezier curve-based flyable trajectories for multi-UAV systems with parallel genetic algorithm. Journal of Intelligent and Robotic Systems: Theory and Applications, 74(1–2), 499–511. https://doi.org/10.1007/s10846-013-9968-6 [25] Porta, J., Parapar, J., Doallo, R., Rivera, F. F., Santé, I., & Crecente, R. (2013). High performance genetic algorithm for land use planning. Computers, Environment and Urban Systems, 37(1), 45–58. https://doi.org/10.1016/j.compenvurbsys.2012.05.003 [26] Jain, M., Kumar, S., & Patle, V. . (2015). Estimation of Execution Time and Speedup for Bitonic Sorting in Sequential and Parallel Enviroment. International Journal of Computer Applications, 122(19), 32–35. https://doi.org/10.5120/21811-5139](https://image.slidesharecdn.com/10222ijcsity01-250806095829-e8701474/75/UAV-Path-Planning-using-Genetic-Algorithm-with-Parallel-Implementation-15-2048.jpg)