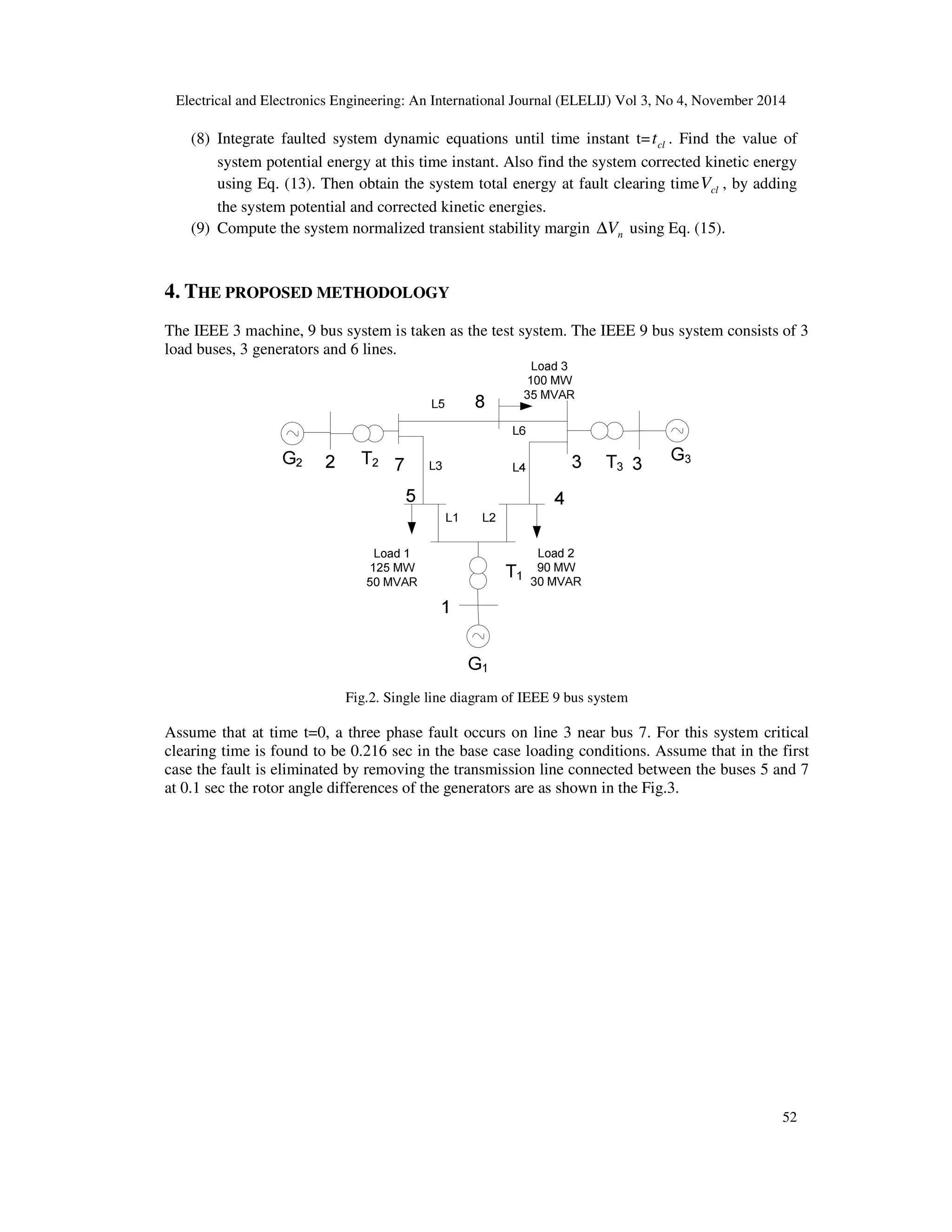
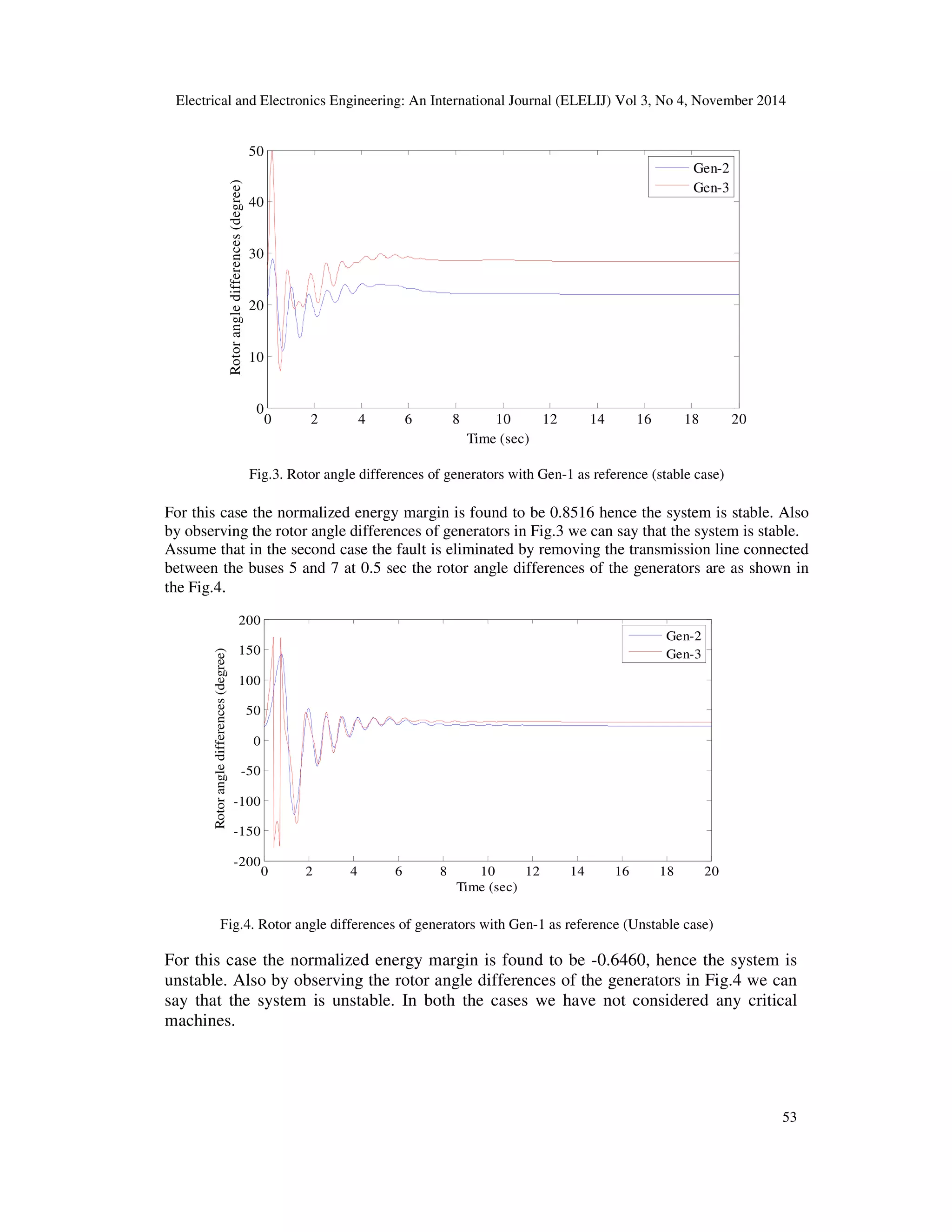
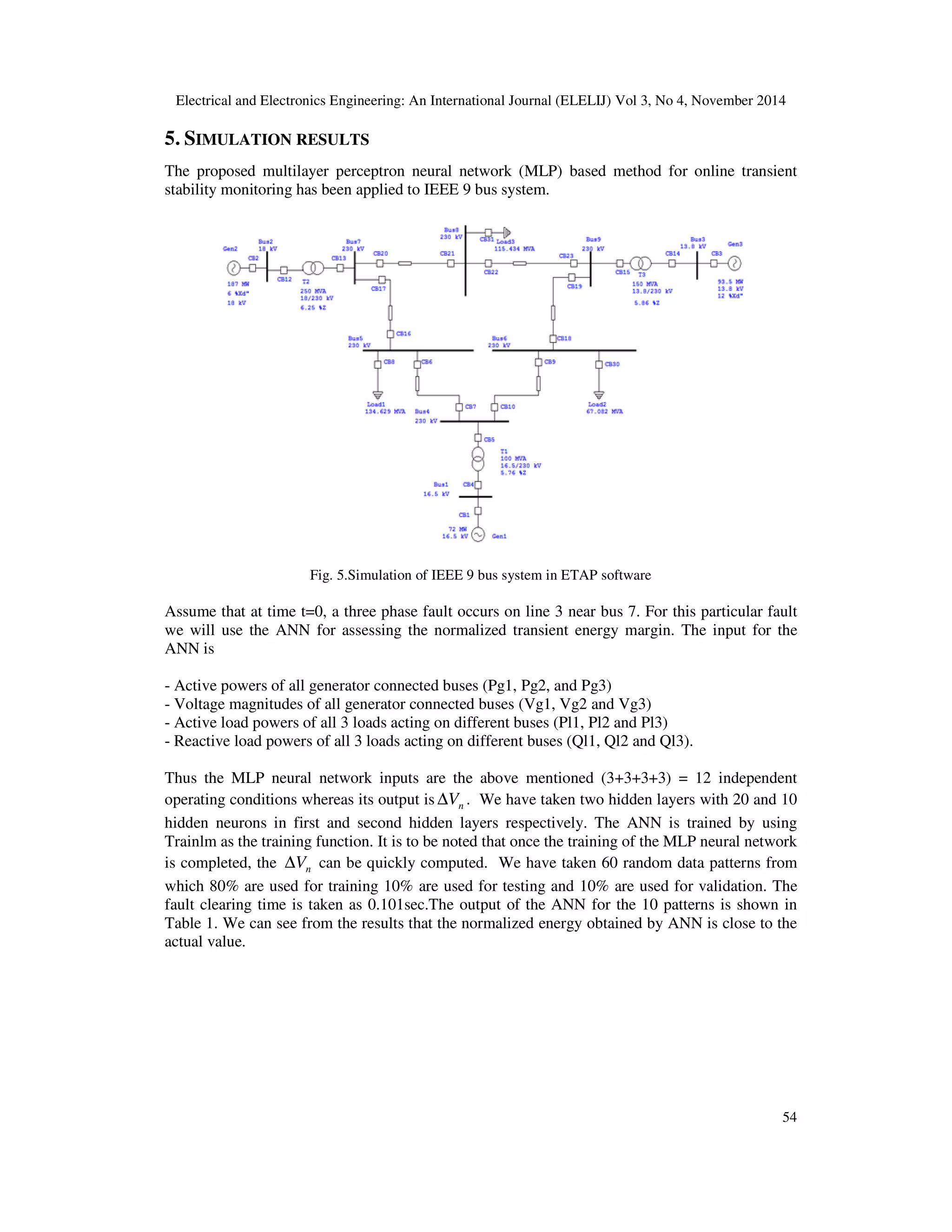
The paper presents a methodology for estimating the normalized transient stability margin of power systems using a multilayered perceptron (MLP) neural network, showcasing its application on the IEEE 9 bus system. By establishing complex relationships between input and output variables, the proposed method provides a fast and accurate tool for online assessment of transient stability, overcoming limitations associated with traditional methods like time-domain simulation and equal area criterion. Results demonstrate the effectiveness of the MLP approach, producing a quantitative measure of system stability based on normalized transient energy margin.
![Electrical and Electronics Engineering: An International Journal (ELELIJ) Vol 3, No 4, November 2014 DOI : 10.14810/elelij.2014.3405 47 POWER SYSTEM TRANSIENT STABILITY MARGIN ESTIMATION USING ARTIFICIAL NEURAL NETWORKS Lakshminarayana Pothamsetty1 Shishir Ranjan2 Mukesh Kumar Kirar3 and Ganga Agnihotri4 1,2,3,4 Department of Electrical Engineering, MANIT, Bhopal, India ABSTRACT This paper presents a methodology for estimating the normalized transient stability margin by using the multilayered perceptron (MLP) neural network. The complex relationship between the input variables and output variables is established by using the neural networks. The nonlinear mapping relation between the normalized transient stability margin and the operating conditions of the power system is established by using the MLP neural network. To obtain the training set of the neural network the potential energy boundary surface (PEBS) method along with time domain simulation method is used. The proposed method is applied on IEEE 9 bus system and the results shows that the proposed method provides fast and accurate tool to assess online transient stability. KEYWORDS Power system stability, transient energy function, potential energy boundary surface (PEBS), neural networks, ETAP software. 1. INTRODUCTION Present power systems are large interconnected networks which span over entire countries and even continents are linking with the generators and loads. The main requirement for the reliable operation of the power system is that the system should be stable when a fault occurs on the system. A system is generally said to be transiently stable, if all the synchronous machines of the system remain in synchronism during the short period following a large disturbance. The transient stability is a fast phenomenon and usually occurring within 1 sec for a generator close to the cause of disturbance. The time domain simulation method is the most commonly used method to solve the set of nonlinear equations describing the system dynamic equations, in order to determine the transient stability [1]. From the inspection of the solution, conclusion can be drawn whether the system is stable or unstable. In the actual operation of a power system the loading conditions and the parameters of the system are quite different from those assumed at the initial planning stage. Therefore for the better assessment of transient stability the system operator should simulate the contingencies in advance, access the results and take preventive control action if required. The time-domain simulation method is the most accurate method for accessing the transient stability but the disadvantage of this method is that, it will take more time and does not provide information about the transient energy margin. The equal area criterion can be applied for assessing the transient stability but this method has some modelling limitations. The transient energy function method can also be applied but this method has also some modelling limitations. Both the equal area](https://image.slidesharecdn.com/powersystemtransientstabilitymarginestimationusingartificialneuralnetworks-141222001534-conversion-gate02/75/Power-system-transient-stability-margin-estimation-using-artificial-neural-networks-1-2048.jpg)
![Electrical and Electronics Engineering: An International Journal (ELELIJ) Vol 3, No 4, November 2014 48 criterion and transient energy methods need a lot of computations to determine the transient stability [2, 3]. Since the transient stability is a fast phenomenon, so better methods should be used to assess the transient stability which provide fast and accurate results. Neural networks can be used to access the transient stability of the large power systems. The main advantage of the neural networks is that it will learn complex relationships and their modular structure which allows parallel processing. The main objective of the present investigation is to propose a MLP neural network based approach for online transient stability analysis through estimation of a normalized transient stability margin ( nV∆ ) [4]. In this paper we have taken nV∆ is a function of only pre-fault system operating point, which can be adequately characterized by a proper set of readily measurable operating conditions in the pre-fault situations. The potential energy boundary surface method along with time domain simulation method is used to obtain critical energy for the particular disturbance under investigation. 2. MULTI-LAYERED PERCEPTRON NEURAL NETWORK Neural networks are inspired by the Human brain. A brain is a massively parallel distributed system made up of highly interconnected neural computing elements called as neurons, which have the ability to learn and thereby acquire knowledge and make it available for use. The neurons are also called as neurodes, processing elements or nodes. The complex relationship between the input variables and output variables is established by using the neural networks. A multilayered feed forward neural network is also known as multi layer perceptron. This neural network consists of an input layer, an output layer and one or more hidden layers. Generally one hidden layer is sufficient to establish complex relationship between the input and output. The number of neurons in the input layer and output layer depends on the specific problem but the number of neurons in the hidden layers is arbitrary and is usually decided by trial and error method [5, 6]. Fig.1. A multilayered perceptron with one hidden layer The neural network is used to adjust the weights and biases of the network in order to reduce the error between the desired output and obtained output. This process of adjusting the weights and biases is known as training. Different algorithms are present to train the neural network. In this paper we have used Trainlm as the training function [7]. Trainlm is the best algorithm compared to other algorithms present up to so far. To obtain the training data the Potential Energy Boundary Surface (PEBS) method along with time domain simulation method is used.](https://image.slidesharecdn.com/powersystemtransientstabilitymarginestimationusingartificialneuralnetworks-141222001534-conversion-gate02/75/Power-system-transient-stability-margin-estimation-using-artificial-neural-networks-2-2048.jpg)
![Electrical and Electronics Engineering: An International Journal (ELELIJ) Vol 3, No 4, November 2014 49 3. NORMALIZED TRANSIENT ENERGY MARGIN Consider a power system composed of n synchronous generators. The motion of the i th machine of an n-machine system reduced to generator internal nodes, using classical machine model representation is described in the Centre of Inertia (COI) formulation [8, 9] by i i dt d ω θ ~= (1) )( ~ θ ω iCOI T i eimi i i fP M M PP dt d M =−−= i =1, 2... n (2) Where, ∑≠= ++= n ij ijijijijiiiei DCGEP 1 2 )cossin( θθ (3) ∑= −= n i eimiCOI PPP 1 )( (4) Where, ijjiij BEEC = , ijjiij GEED = , ijijij jBGY += and ∑= = n i iT MM 1 (5) Where iθ is the rotor angle, iω~ is the rotor speed, iM is inertia constant, miP is the input mechanical power, eiP is the output electrical power, iE is the generator internal voltage for machine i , Y is the reduced admittance matrix and ijY is the ij th element of the reduced admittance matrix. ijG and ijB are conductance and susceptance elements of the reduced admittance matrix. The energy function for the post-fault system is constructed as ∑ ∫∑ == −= n i iii n i i dfMV i s i 1 2 1 )( 2 1 ),( θθωωθ θ θ TOTPEKE VVV ≅+= )()~( θω (6) Where iθ and iω~ are the variables from the faulted trajectory. In the absence of the transfer conductance terms ijG , the expression for )(θPEV can be expressed analytically in a closed form, otherwise the ijG terms contribute a path dependent term as follows ∑∑ − == −−= 1 11 )()( n i s ii n i iPE PV θθθ ∑ ∫+= + + +−− n j jiijij s ijijij ji s j s i dDC 11 )(cos)cos(cos θθ θθ θθθθθ (7)](https://image.slidesharecdn.com/powersystemtransientstabilitymarginestimationusingartificialneuralnetworks-141222001534-conversion-gate02/75/Power-system-transient-stability-margin-estimation-using-artificial-neural-networks-3-2048.jpg)
![Electrical and Electronics Engineering: An International Journal (ELELIJ) Vol 3, No 4, November 2014 50 Where, ijimii GEPP 2 −= In computing Eq. (7) iθ is obtained from the faulted trajectory and s iθ is obtained from the post- fault stable equilibrium point. The third term of Eq. (7) is path dependent. By assuming a straight line path of integration, the third term of Eq. (7) is approximated analytically as ∫ + + + ji s j s i jiijij dD θθ θθ θθθ )(cos )sin(sin )()( )()( s ijijs jj s ii s jj s ii ijD θθ θθθθ θθθθ − −−− −+− ≅ (8) After the removal of a disturbance, if the power system is stable then a certain amount of kinetic energy is not absorbed. This indicates that not all the transient kinetic energy, created by the disturbance, contributes to the instability of the system. Some of the kinetic energy created by the disturbance is responsible for the inter-machine motion between the generators [10, 11], and does not contribute to the separation of the severely distributed generators from the rest of the system. Therefore by using the transient energy function method in order to assess the accurate transient stability, the amount of kinetic energy which is not contributing to the instability of the system should be subtracted from the energy that needs to be absorbed by the system for stability to be maintained. If the inertias of the system are finite, the disturbance splits the generators of the system into two groups: the critical machines and the rest of the generators [12, 13]. Their angular speeds and inertial centres have inertia constants crω~ , crM , sysω~ ,Msys respectively. These parameters are obtained as follows ∑∈ = cri icr MM , ∑∈ = sysi isys MM (9) cr cri ii cr M M∑∈ = ω ω ~ ~ , sys sysi ii sys M M∑∈ = ω ω ~ ~ (10) In the Eq. (9) and Eq. (10) the subscript “cr” denotes the critical machines group and “sys” denotes the rest of the machines in the system. The kinetic energy which is responsible for the separation of the two groups [14, 15, 16] is the same as that of an equivalent one-machine- infinite-bus system having inertia constant eqM and angular velocity eqω~ given by syscr syscr eq MM MM M + = (11) )~~(~ syscreq ωωω −= (12) And the corresponding kinetic energy is given by 2~ 2 1 eqeqKEcorr MV ω= (13) Therefore the kinetic energy in Eq. (6) is replaced by Eq. (13). By computing the two values of the transient energies the transient stability can be assessed.](https://image.slidesharecdn.com/powersystemtransientstabilitymarginestimationusingartificialneuralnetworks-141222001534-conversion-gate02/75/Power-system-transient-stability-margin-estimation-using-artificial-neural-networks-4-2048.jpg)
![Electrical and Electronics Engineering: An International Journal (ELELIJ) Vol 3, No 4, November 2014 51 1) The value of the transient energy is normally determined at fault clearing time, clV and 2) The critical value of the transient energy function crV which is evaluated at the Controlling Unstable Equilibrium Point (CUEP) for the particular disturbance under investigation. If clV < crV then the system is stable. In this paper we have used Potential Energy Boundary Surface (PEBS) method along with Time Domain Simulation (TDS) method to calculate the crV . In other way the transient stability can be assessed by computing the transient stability margin V∆ [17, 18] given by clcr VVV −=∆ (14) If V∆ is greater than zero the system is stable, and if V∆ is less than zero the system is unstable. For the purpose of training the neural networks we have define a normalized transient energy margin nV∆ [19]. This normalized transient stability margin is calculated differently for stable and unstable cases as − − =∆ cl clcr cr clcr n V VV V VV V (15) From the above, we can easily shown that the nV∆ lies between -1 and +1. If nV∆ >0, the system is stable, and if nV∆ <0, the system is unstable. This normalized transient energy margin represents a quantitative measure of degree of stability or instability of the system. In this paper we have used the following procedure [20, 21] to obtain the normalized transient energy margin (1) Find the post-fault stable equilibrium point ( s θ ) by solving 0)( =θif i =1, 2...n (2) Integrate Eq. (1) and Eq. (2) to obtain the faulted trajectory. (3) Monitor Eq. (7) to obtain )(θPEV at each time step. The parameters in )(θf and )(θPEV pertain to post fault system. (4) Continue steps 2 and 3 until the transient potential energy reaches a maximum along the faulted trajectory. Denote this maximum value by ' crV . This is a good estimate for actual crV for that fault. (5) From the faulted trajectory find the time instant ' crt at which the transient energy V reaches ' crV . The ' crt is viewed as an estimate of actual crt . (6) Find actual crt by using ' crt as an initial guess in the time-domain simulation technique accompanied by trial and error method. (7) Integrate the faulted system dynamic equations until time instant, t= crt . Find the value of system potential energy at this time instant. Also find the system corrected kinetic energy using Eq. (13). Then obtain the system critical energy crV by adding the system potential and corrected kinetic energies. If system is stable ( crt > clt ) If system is unstable ( crt < clt )](https://image.slidesharecdn.com/powersystemtransientstabilitymarginestimationusingartificialneuralnetworks-141222001534-conversion-gate02/75/Power-system-transient-stability-margin-estimation-using-artificial-neural-networks-5-2048.jpg)
![Electrical and Electronics Engineering: An International Journal (ELELIJ) Vol 3, No 4, November 2014 55 Table.1 Comparison of actual and estimated nV∆ 6. CONCLUSIONS Fast transient stability assessment (TSA) is greatly important in the actual operation of power system. In this paper we have presented a multi-layered-perceptron (MLP) neural network based approach for online TSA through estimation of a normalized transient stability margin ( nV∆ ) for a particular contingency under different operating conditions. Simulation results on the IEEE 9 bus system demonstrated that the proposed method was capable of estimating nV∆ with a good degree of accuracy. From the results we can say that the proposed approach is well suitable for online normalized transient stability margin estimation. REFERENCES [1] A.Karami, (2011) “Power system transient stability margin estimation using neural networks”, Electrical Power and Energy systems, vol.33, pp.983-991. [2] V.Vittal, E.Z..Zhou, C.Hwang, A.A. Fouad,(NOV 1989) “Derivation of stability limits using analytical sensitivity of the transient energy margin” IEEE Trans. Power systems , vol.4(4), pp.1363- 1372. [3] A.A Fouad, Vijay Vittal, and Taekyoo oh.,(1984) “critical energy for transient stability assessment of a multi machine power systems.” IEEE Trans., vol.PAS-103, pp.2199-2206. [4] F.A.Boytes, and R.Ramirez, (Nov.1996) “Transient stability assessment in longitudinal power systems using artificial neural networks” IEEE Trans. On power systems, vol.11, pp.2003-2010. [5] S. Rajasekharan and G.A. Vijayalakshmi Pai, “Neural networks, Fuzzy logic and Genetic Algorithms: Synthesis and Applications,” PHI Learning Private Limited, 15th edition, 2003. [6] L.D. Colvara, “Stability analysis of power systems described with detailed models by automatic method,” Electric Power and Energy Systems, vol. 31, 2009, pp. 139-145. [7] D.Prasad Wadduwage, Christine Qiong Wu, U.D. Annakage, (2013) “Power system transient stability analysis via the concept of Lyapunov Exponents” Electric Power Systems Reasearch vol.104,pp.183- 192. [8] A.A. Fouad, S.E. Stanton, “transient stability of a multi machine power system”, part 1: Investigation of system trajectory; and part 2: critical transient energy.” IEEE Trans., vol. PAS-100, pp.3408-3424. [9] G.A. Maria, C.Tang, and J.kim, (May 1990) “Hybrid transient stability analysis” IEEE Trans. on Power systems, vol.5, no.2, pp 384-391. [10 ]Da-Zhong Fang, T.S. Chung, Yao Zhang and Wennan Song, (May 2000) “Transient stability limit conditions analysis using a corrected transient energy function approach” IEEE Trans. on Power systems, vol .15, No.2. [11] A.L.Bettiol, A.Souza, J.L.Todesco, J.R.Tesch Jr, (2003) “Estimation of critical clearing times using neural networks” IEEE Bologna Power Tech conference, june 23-26, Bolagna,Italy.](https://image.slidesharecdn.com/powersystemtransientstabilitymarginestimationusingartificialneuralnetworks-141222001534-conversion-gate02/75/Power-system-transient-stability-margin-estimation-using-artificial-neural-networks-9-2048.jpg)
![Electrical and Electronics Engineering: An International Journal (ELELIJ) Vol 3, No 4, November 2014 56 [12] A.L. Bettiol, L.Wehenkel, and M.Pavelia, (May 1999) “Transient stability constrained maximum allowable transfer” IEEE Trans. On power systems, vol.14, pp-654-659. [13] D.J.Sobajic, and Y.H.Pao, (Feb 1989) “Artificialneural network based dynamic security assessment for electric power systems” IEEE Trans. on power systems, vol.4, pp 220-228. [14] F.A.Rahimi, M.G. Lauby, J.N. Wrubel, and K.L. Lee, (May 1993) “Evaluation of the Transient Energy Function Method for On-line Security Analysis” IEEE Trans. on Power systems, vol.PWRS- 8, no.2. [15] M. Aggoune, M.A.El-sharkawi, D.C .Park, M.J.Damborg, and R.J Marks, (May 1991) “preliminary results on using artificial neural networks for security assessment” IEEE Trans. on power systems ,vol.6, pp.890-896. [16] M.Pavella, (Jan 1998) “Generalized One-machine Equivalents in transient stability analysis,” IEEE Power Engineering Review, pp.50-52. [17] Pao YH, Sobajic DJ, (1992) “Combined use of unsupervised and supervised learning for dynamic security assessment” IEEE Trans. on Power Systems;7(2), pp.878-884. [18] Zhou Q, Davidson J, Foaud AA, (1994) “Application of artificial neural networks in power system security and vulnerability assessment” IEEE Trans. on Power Systems;9(1), pp.525-532. [19] Hobson E, Allen GN, (1994) “Effectiveness of artificial neural networks for first swing stability determination of practical systems” IEEE Trans. on Power Systems;9(2), pp.1062–1068. [20] Karami A, Mohammadi MS, (2008) “Radial basis function neural network for power system load- flow” Electr Power Energy Syst;30, pp.60–66. [21] T.Athay, R.Podmore, and S. Virmani, (1979) “A practical method for direct analysis of transient stability,” IEEE Trans on Power Apparatus Syst., vol.PAS-98, pp.573-584. Authors Lakshminarayana Pothamsetty was born in Ongole, India on 15 July 1991. He received the B. Tech (Electrical) degree from RVR & JC College of Engg., Guntur, A.P., India in 2012 and pursuing M. Tech degree in Power Systems from MANIT, Bhopal, India. Shishir Ranjan was born in Lucknow, India on 6 June 1987. He received the B. Tech (Electrical) degree from Uttar Pradesh Technical University, U. P, India in 2010 and pursuing M. Tech degree in Power Systems from MANIT, Bhopal, India. Mukesh Kumar Kirar was born in Narsinghpur, India, in 06 Feb 1983. He received the B.E. (Electrical) degree from Government Engg. College, Ujjain, India in 2006 and M. Tech. (Power System) in 2008 and pursuing Ph.D from MANIT, Bhopal, India. He is currently working as an assistant professor in the Department of Electrical Engineering, MANIT, Bhopal, India. His fields of interests are power system stability and control, transformers and machines. Ganga Agnihotri was born in Sagar, India, in 27 May 1949. She received the B.E. (Electrical) degree from MACT, Bhopal, India. She received the M.E. (Advance Electrical Machine) and PhD (Power System Planning Operation and Control) from University Of Roorkee, Roorkee in 1974 and 1989 respectively. She is currently working as a professor in the Department of Electrical Engineering, MANIT, Bhopal, India. She has 12 research papers in International journals, 20 research papers in National journals, 22 research papers in International Conferences and 70 research papers in National Conferences. Her fields of interest are Power System Planning, Power Transmission Pricing, Power System Analysis and Deregulation. Dr. Agnihotri has a membership of Fellow IE(I) and LISTE.](https://image.slidesharecdn.com/powersystemtransientstabilitymarginestimationusingartificialneuralnetworks-141222001534-conversion-gate02/75/Power-system-transient-stability-margin-estimation-using-artificial-neural-networks-10-2048.jpg)