
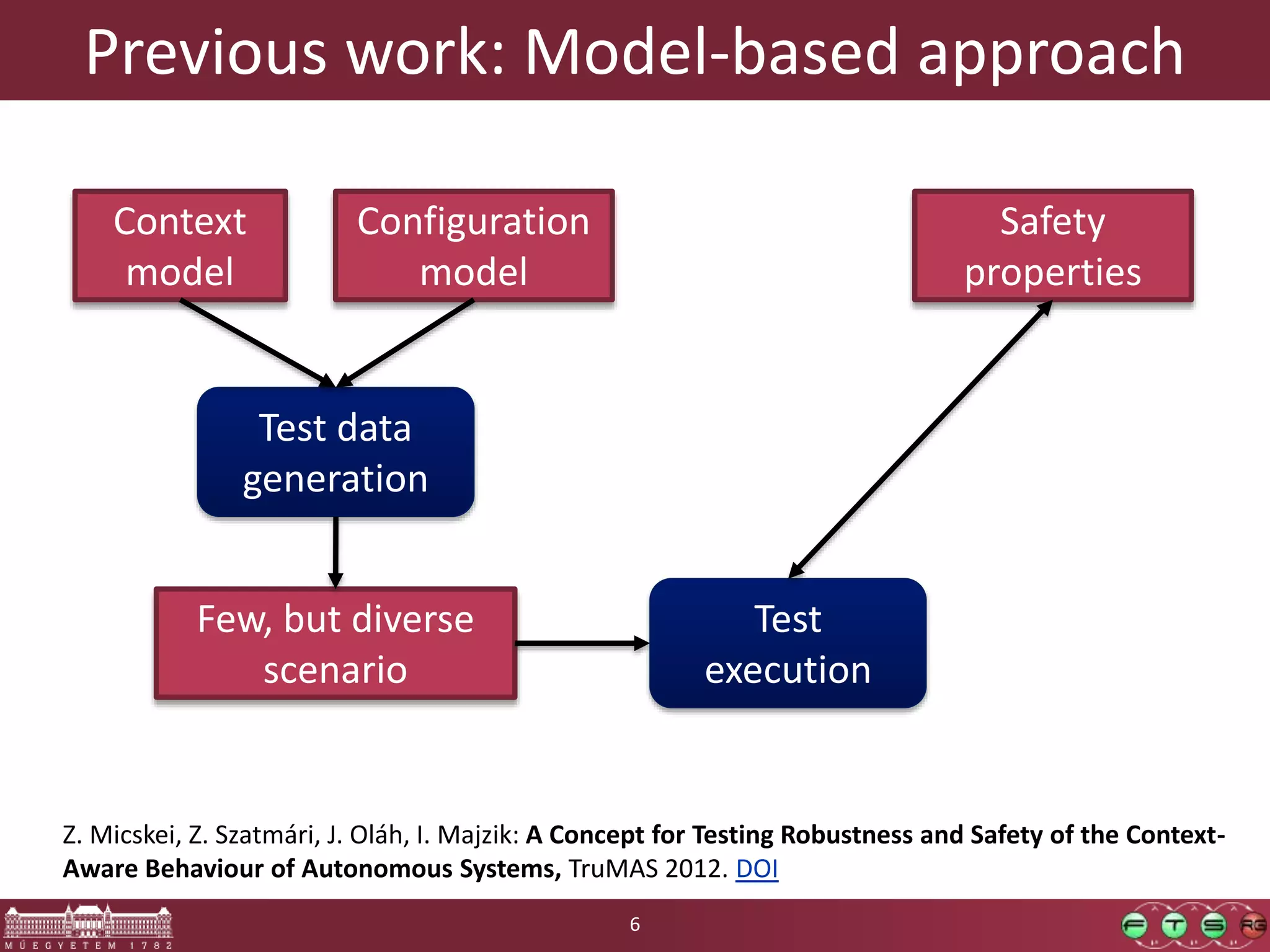
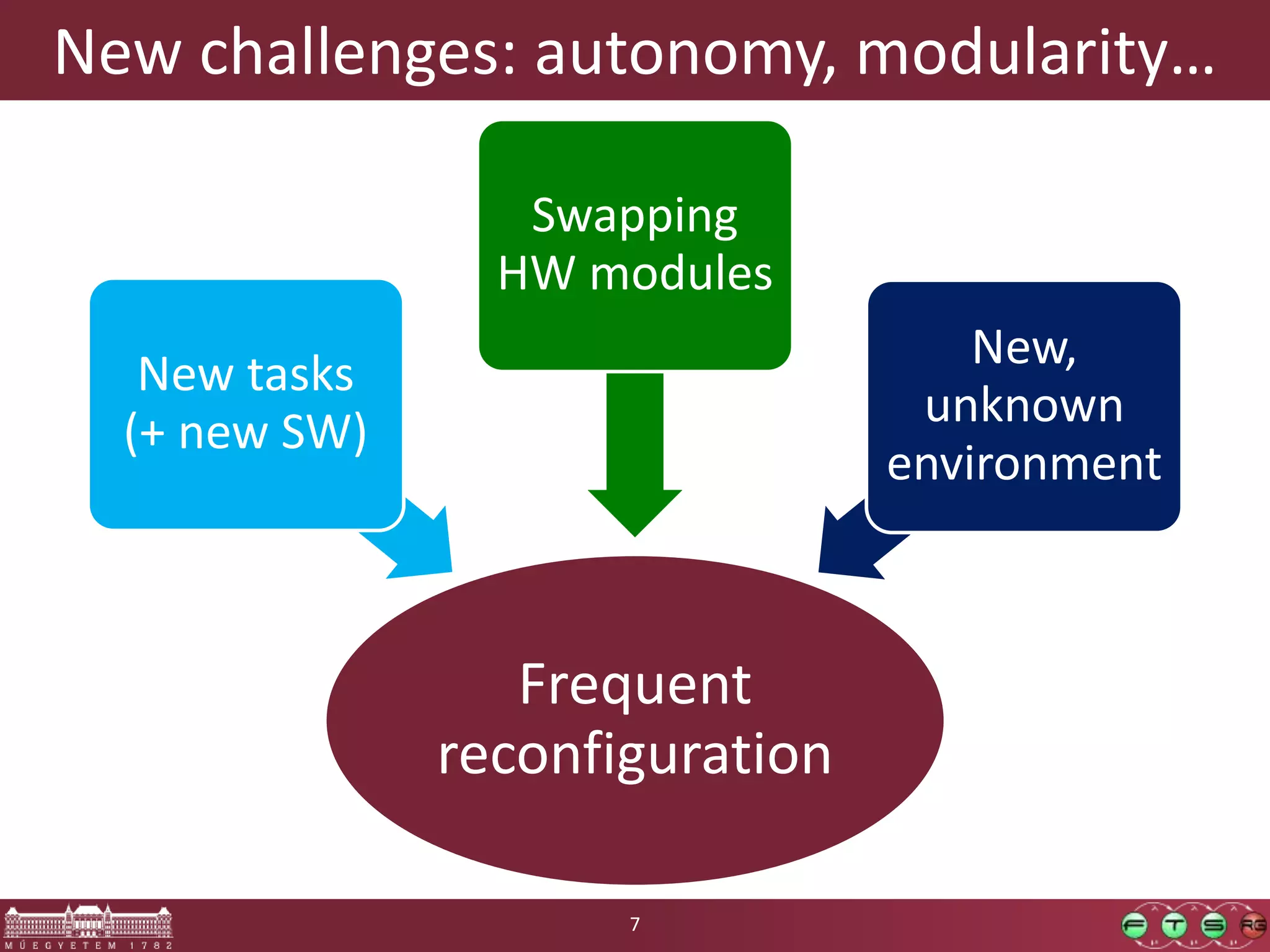
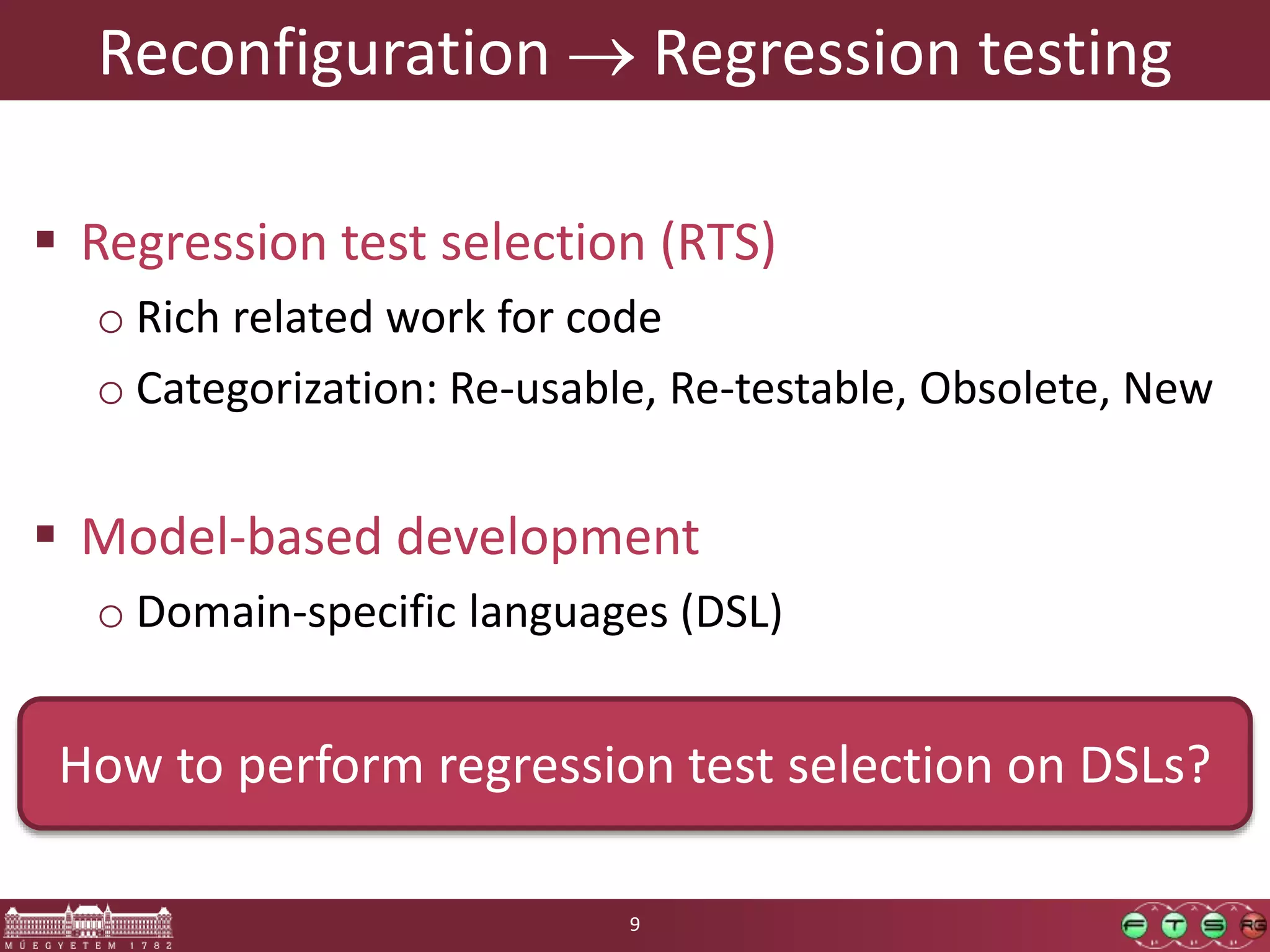
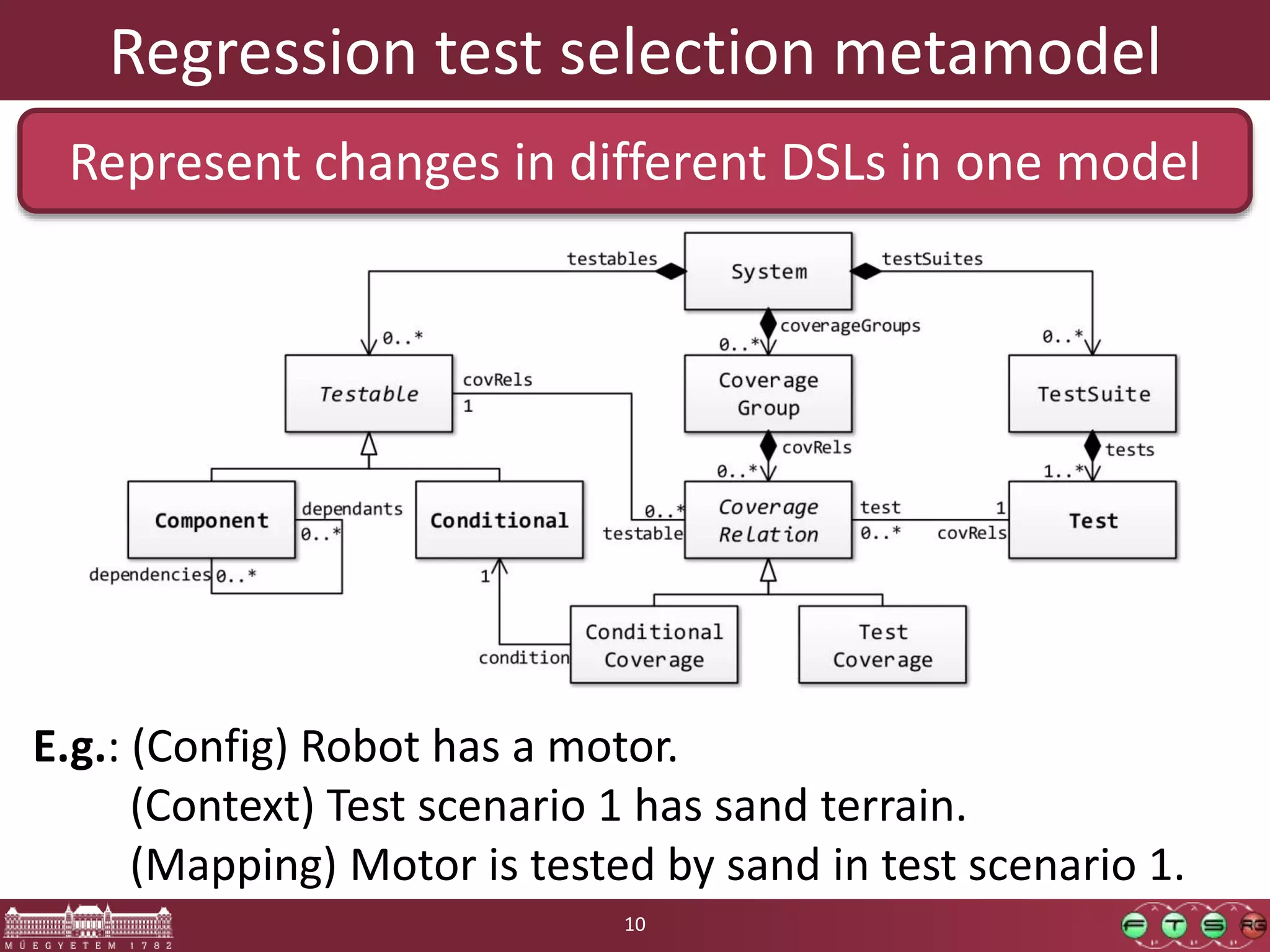
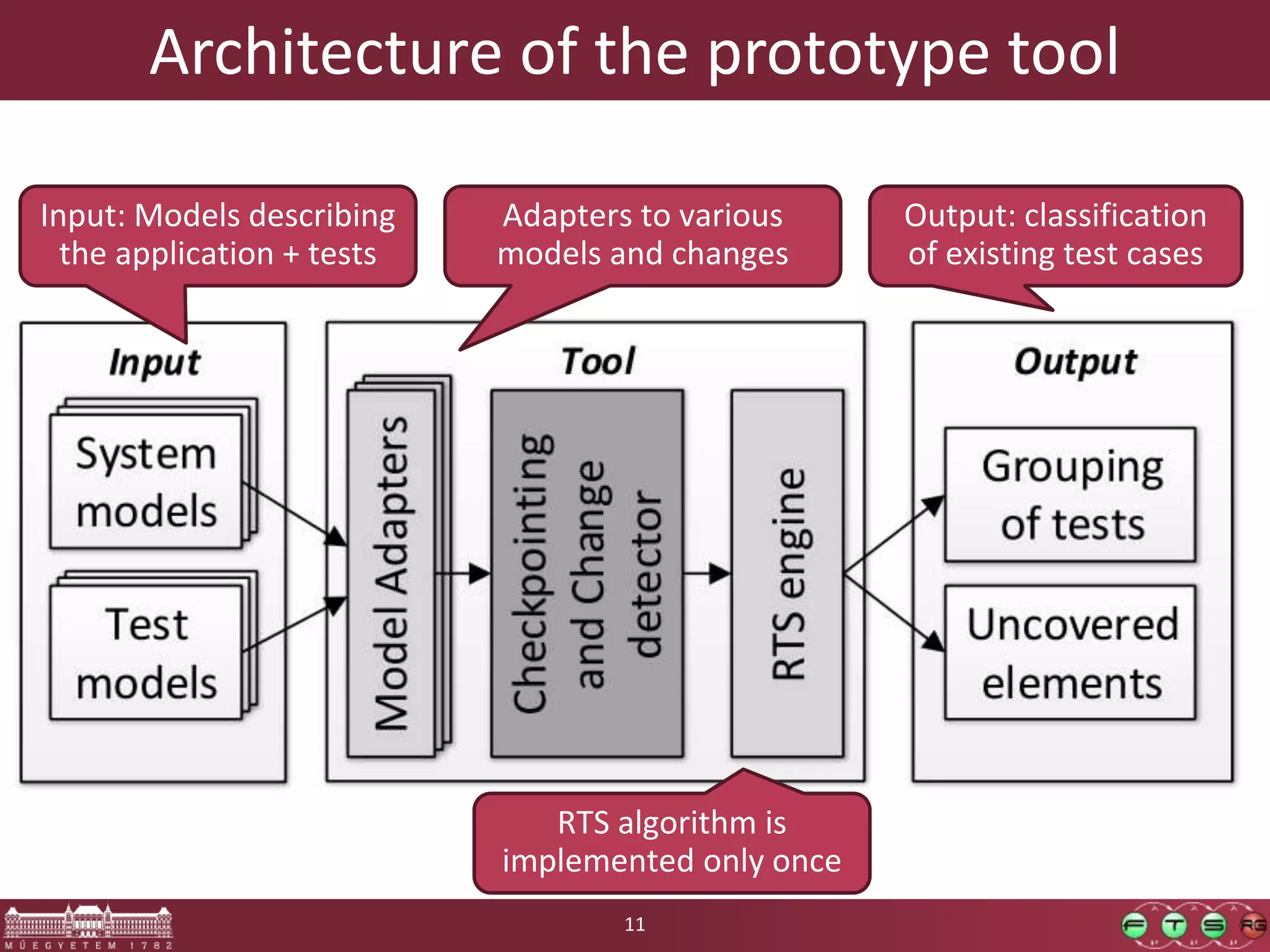
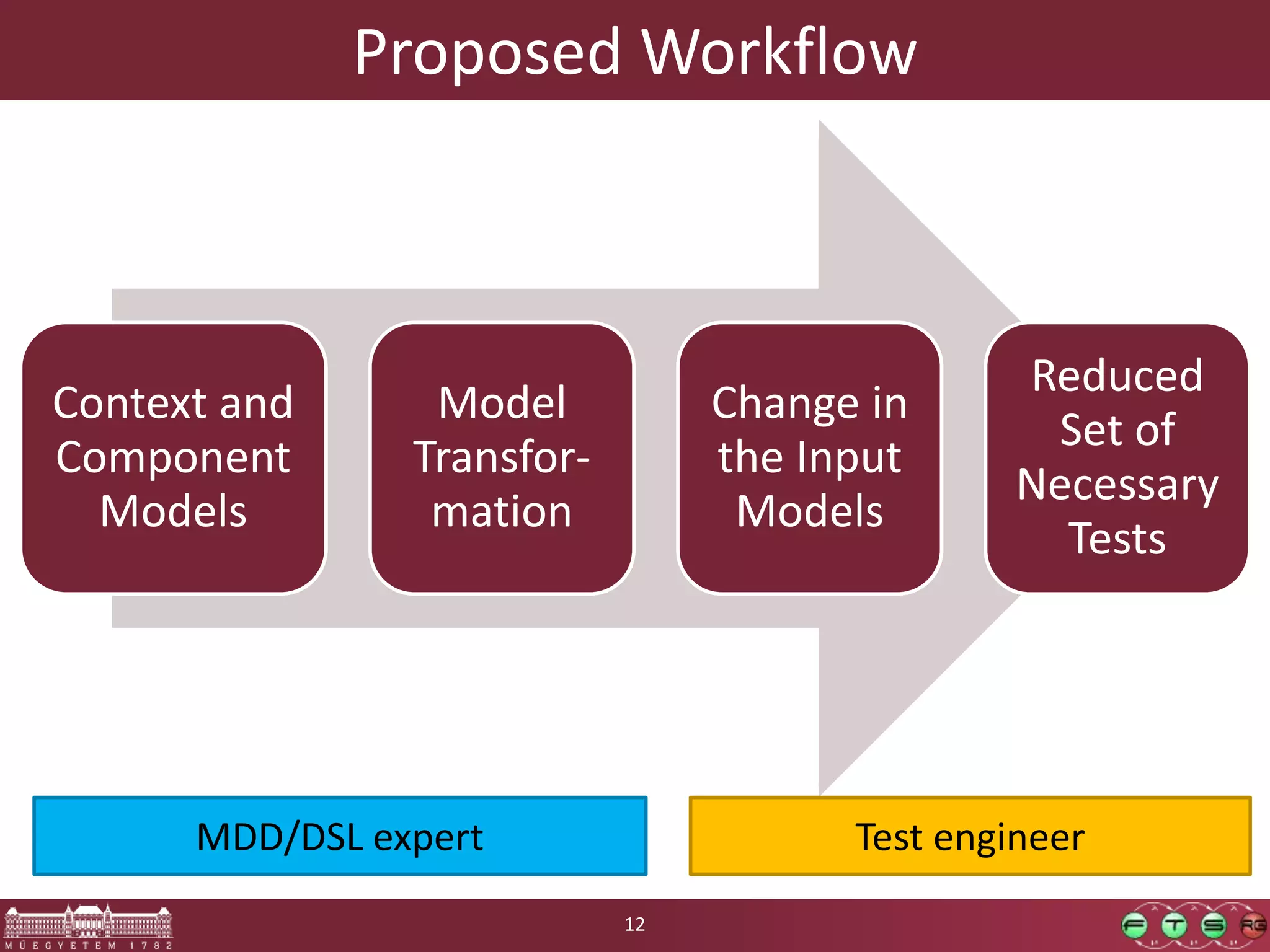
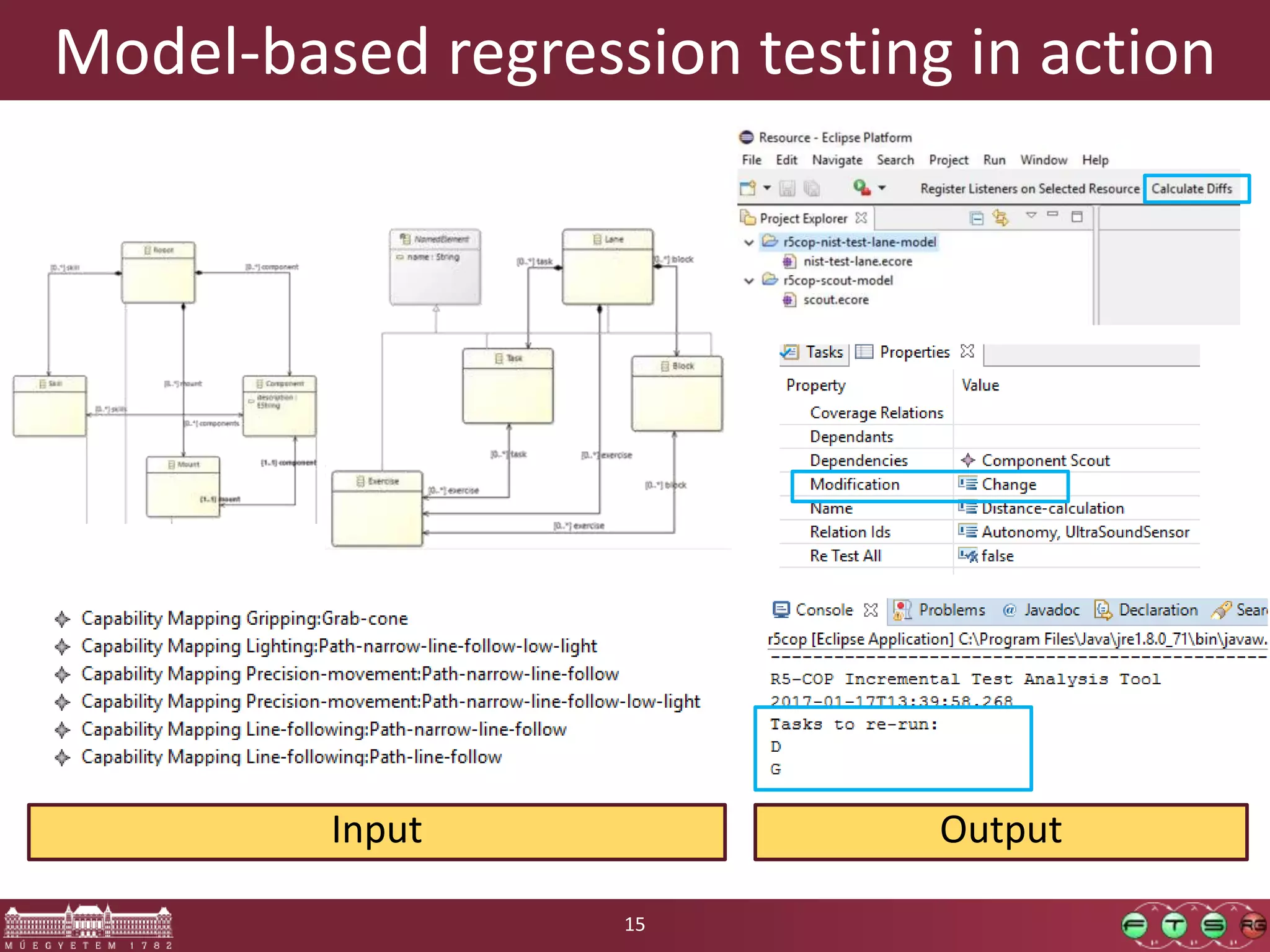
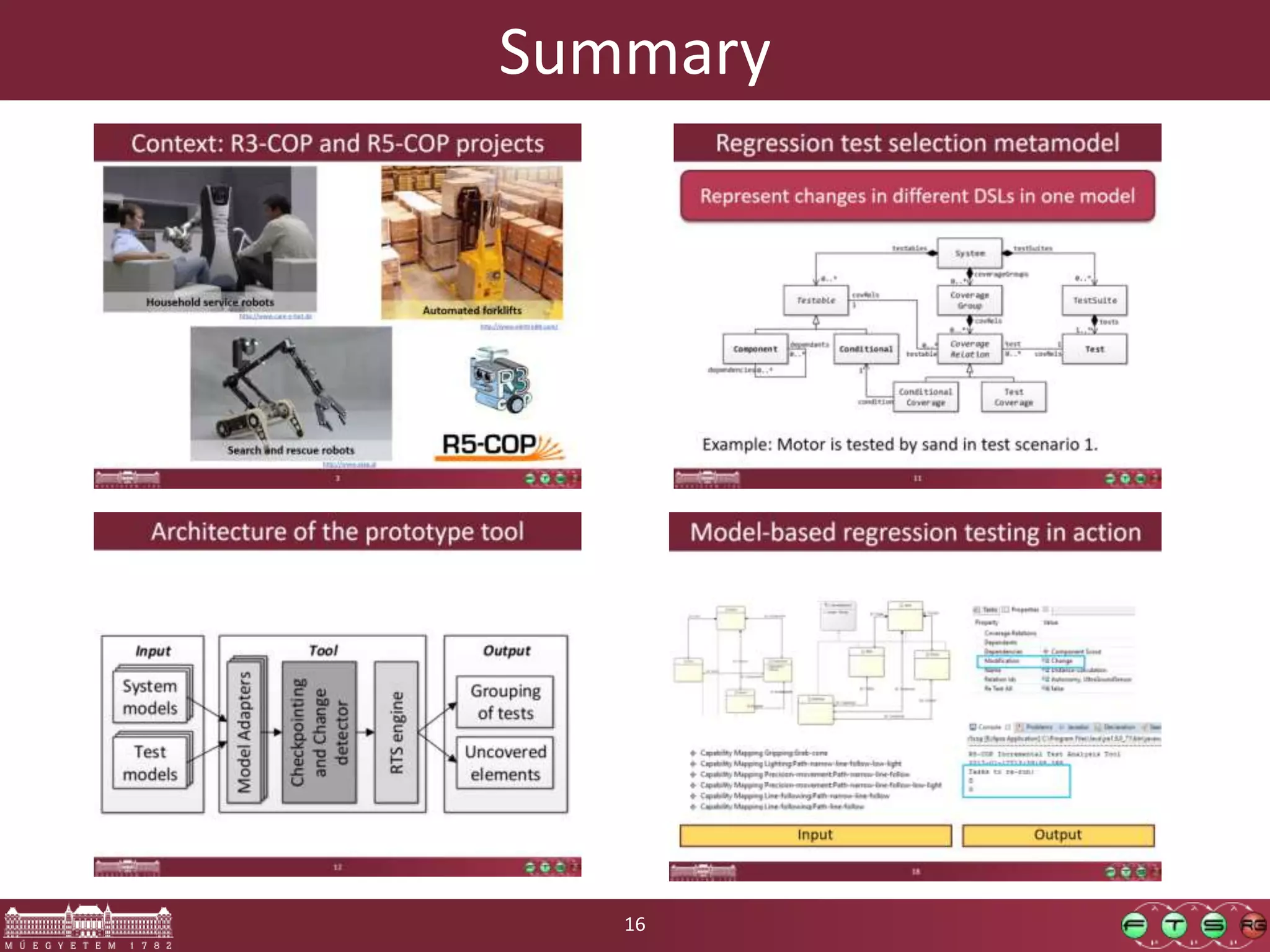

The document discusses a model-based regression testing approach for autonomous robots, focusing on projects like R3-COP and R5-COP. It outlines the limitations of current testing methods and proposes a new approach that integrates regression test selection and domain-specific languages to efficiently classify existing test scenarios. The findings highlight the scalability of the technologies used and the utility of the generic approach across various testing iterations and DSLs.