Downloaded 18 times

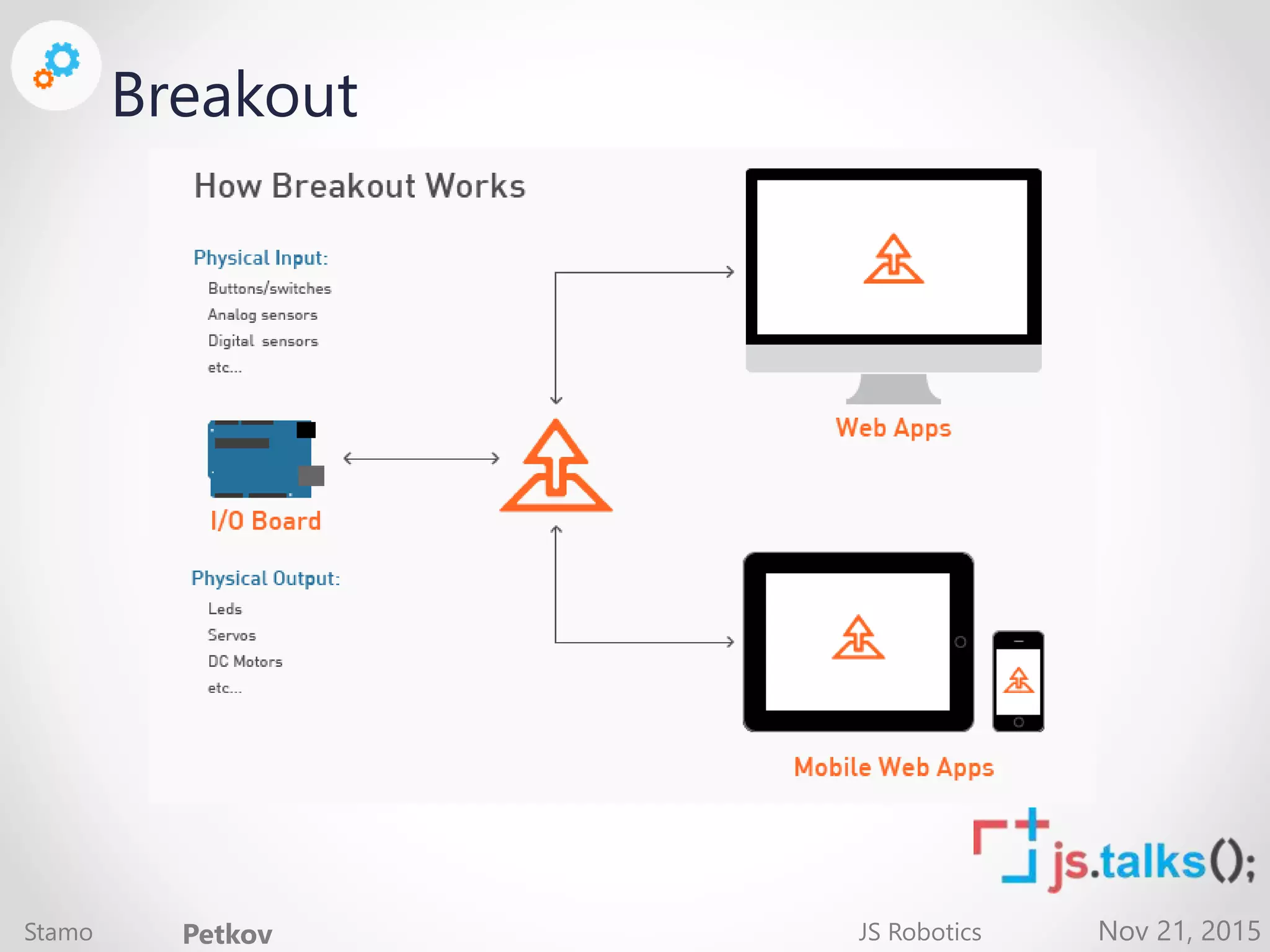
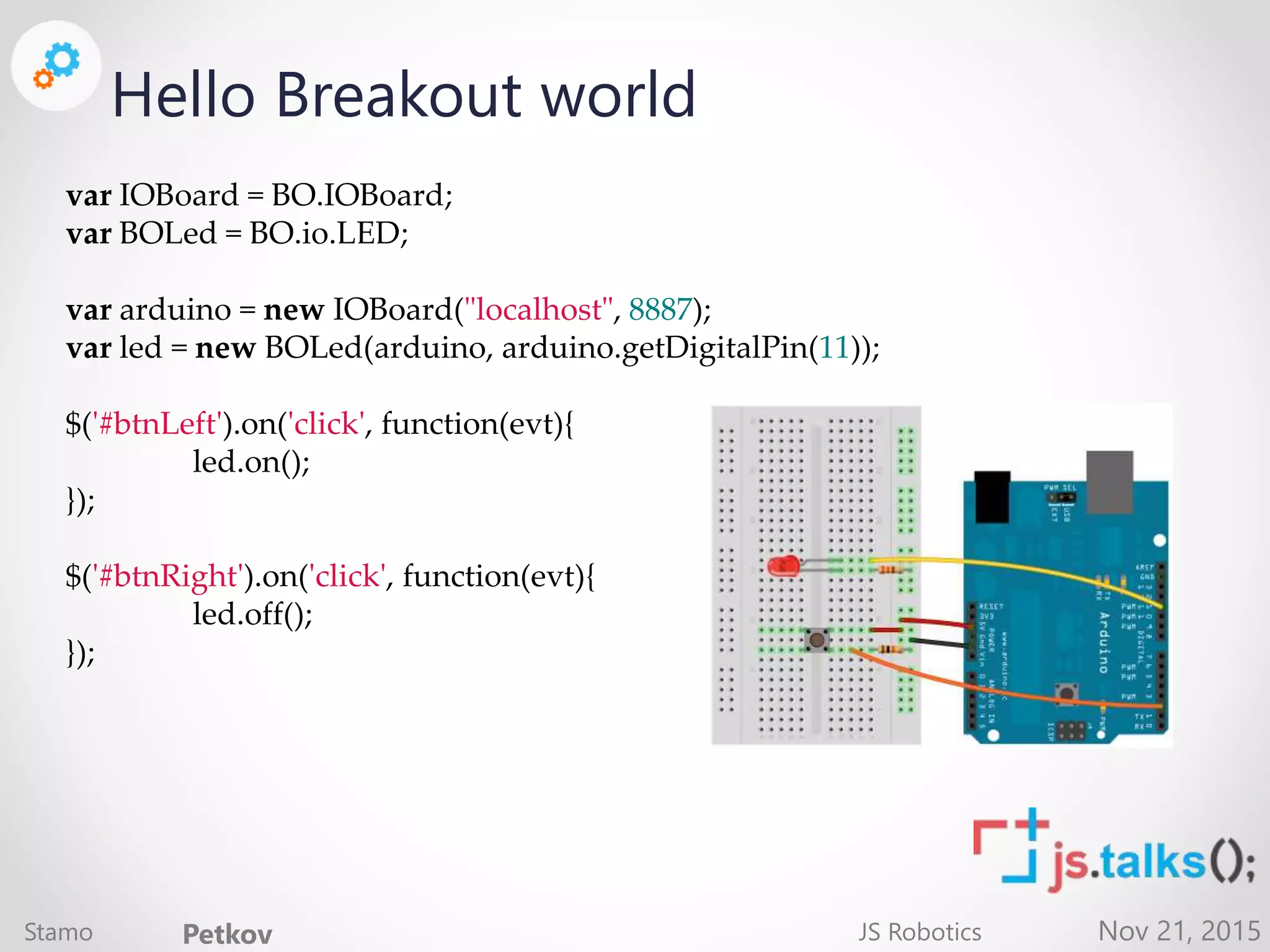
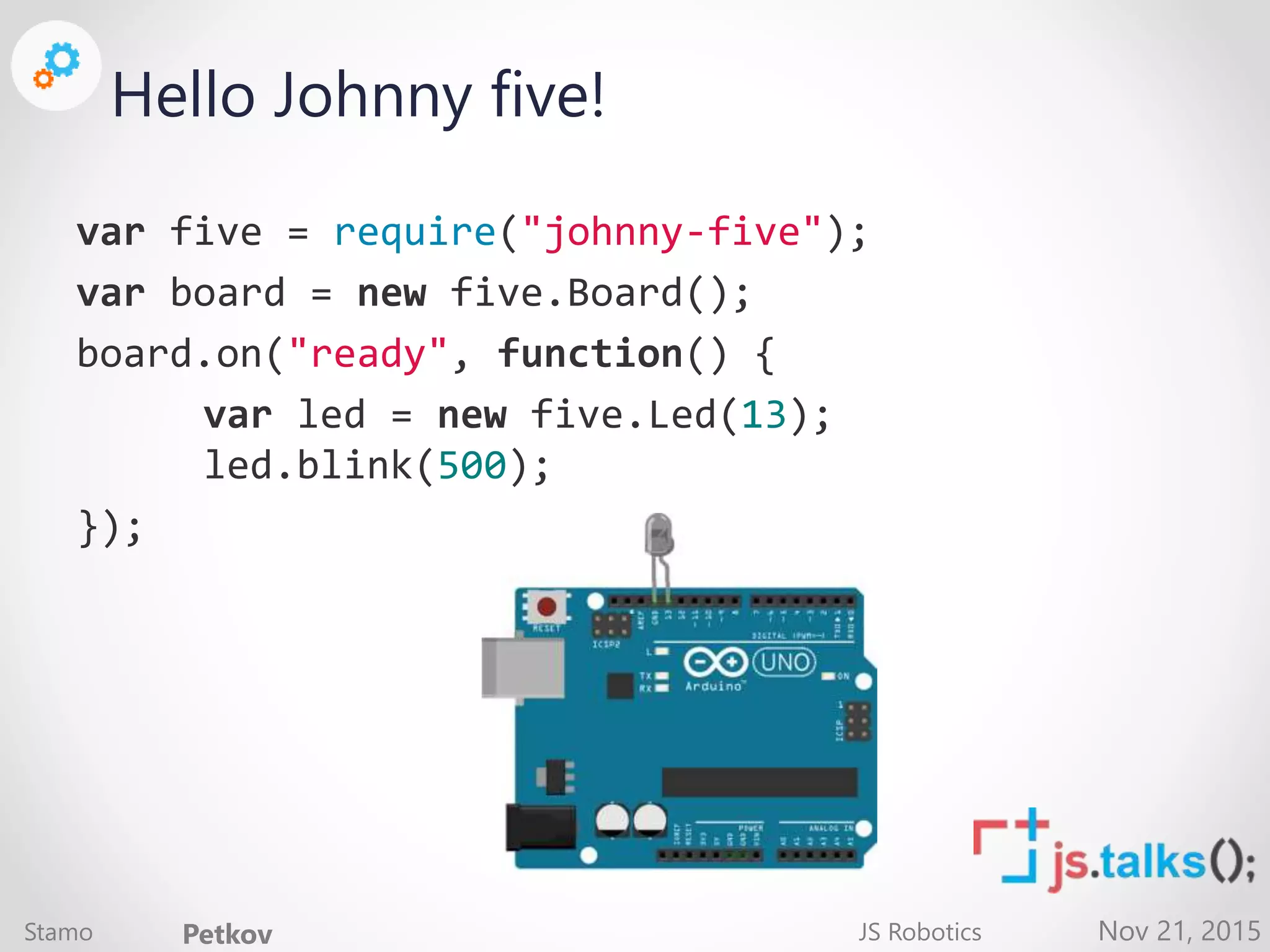

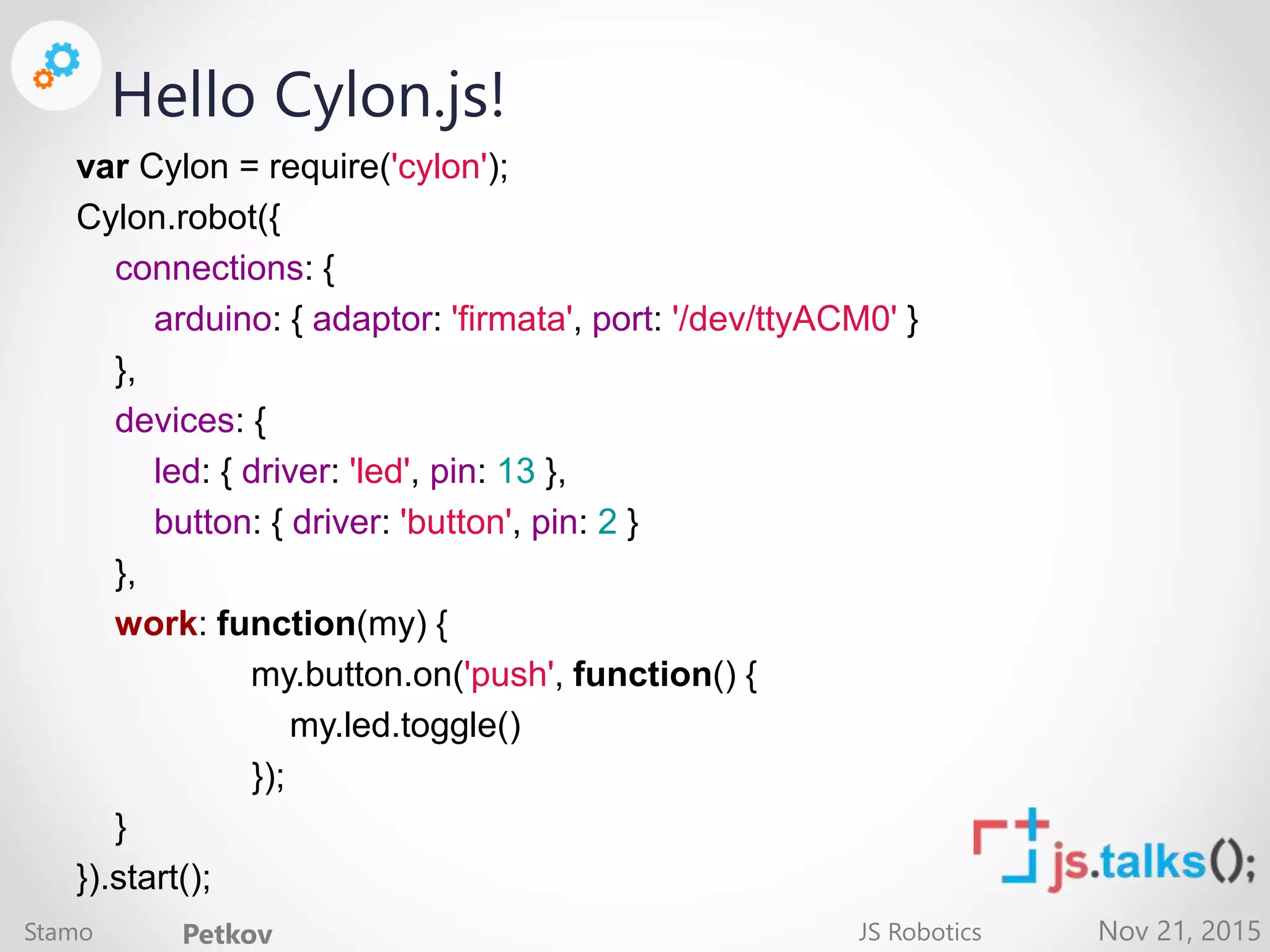

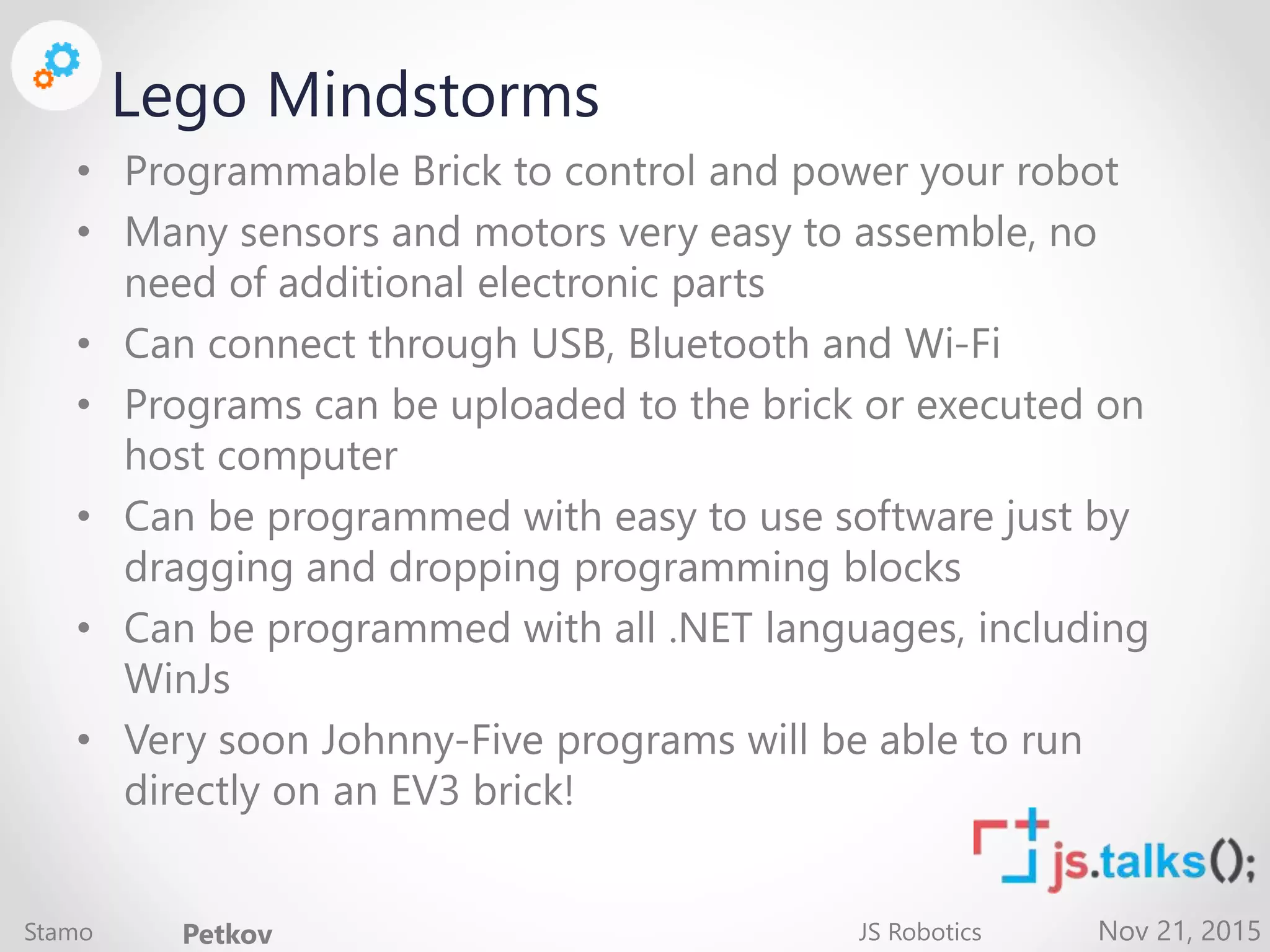


The document discusses JavaScript robotics and provides an agenda for a presentation on the topic. It defines robotics, explains why JavaScript is suitable for robotics, and describes Firmata, Breakout, Johnny-Five, and Cylon.js - frameworks for JavaScript robotics. It also discusses using Lego Mindstorms kits to involve family in robotics projects.