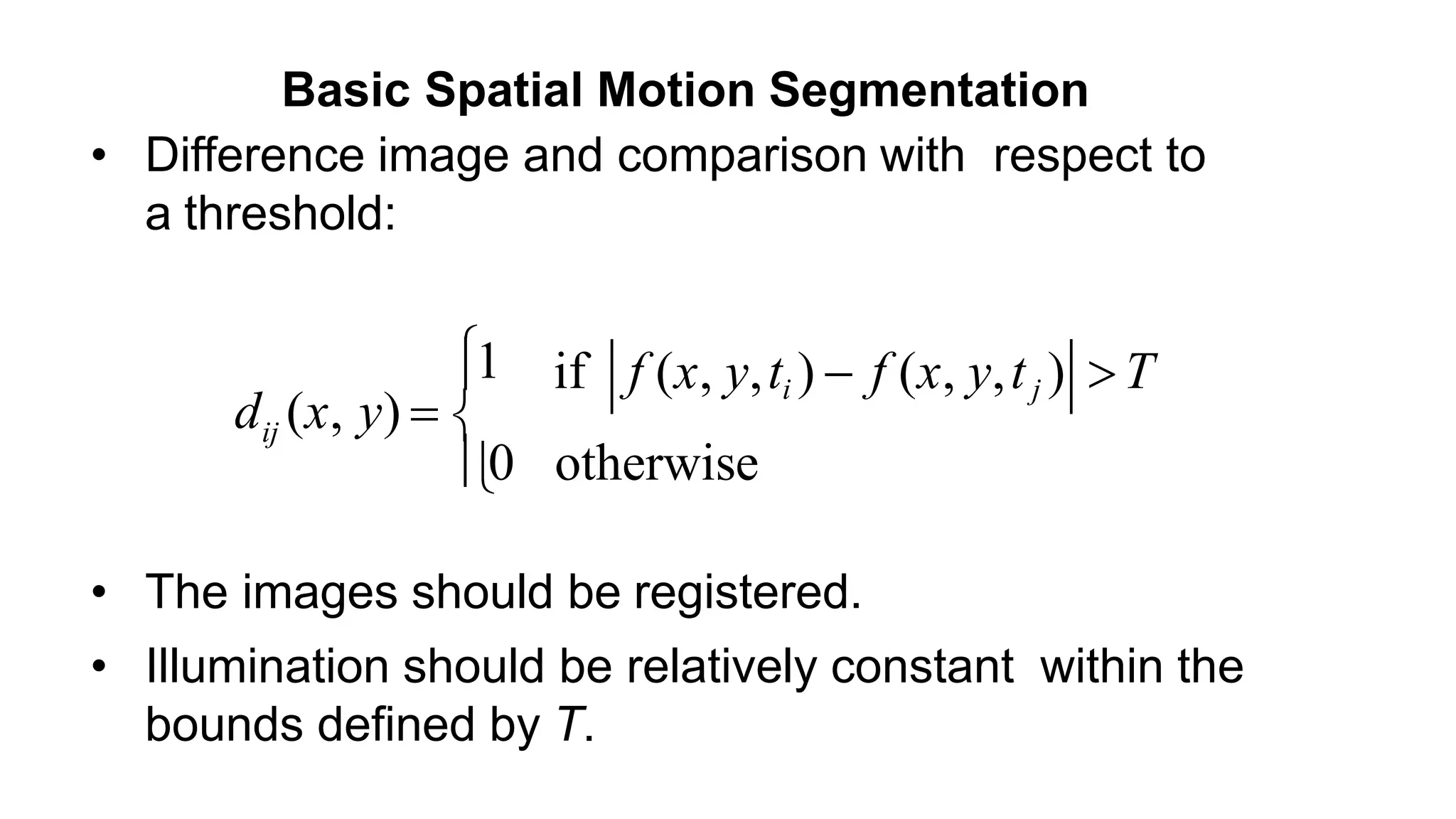
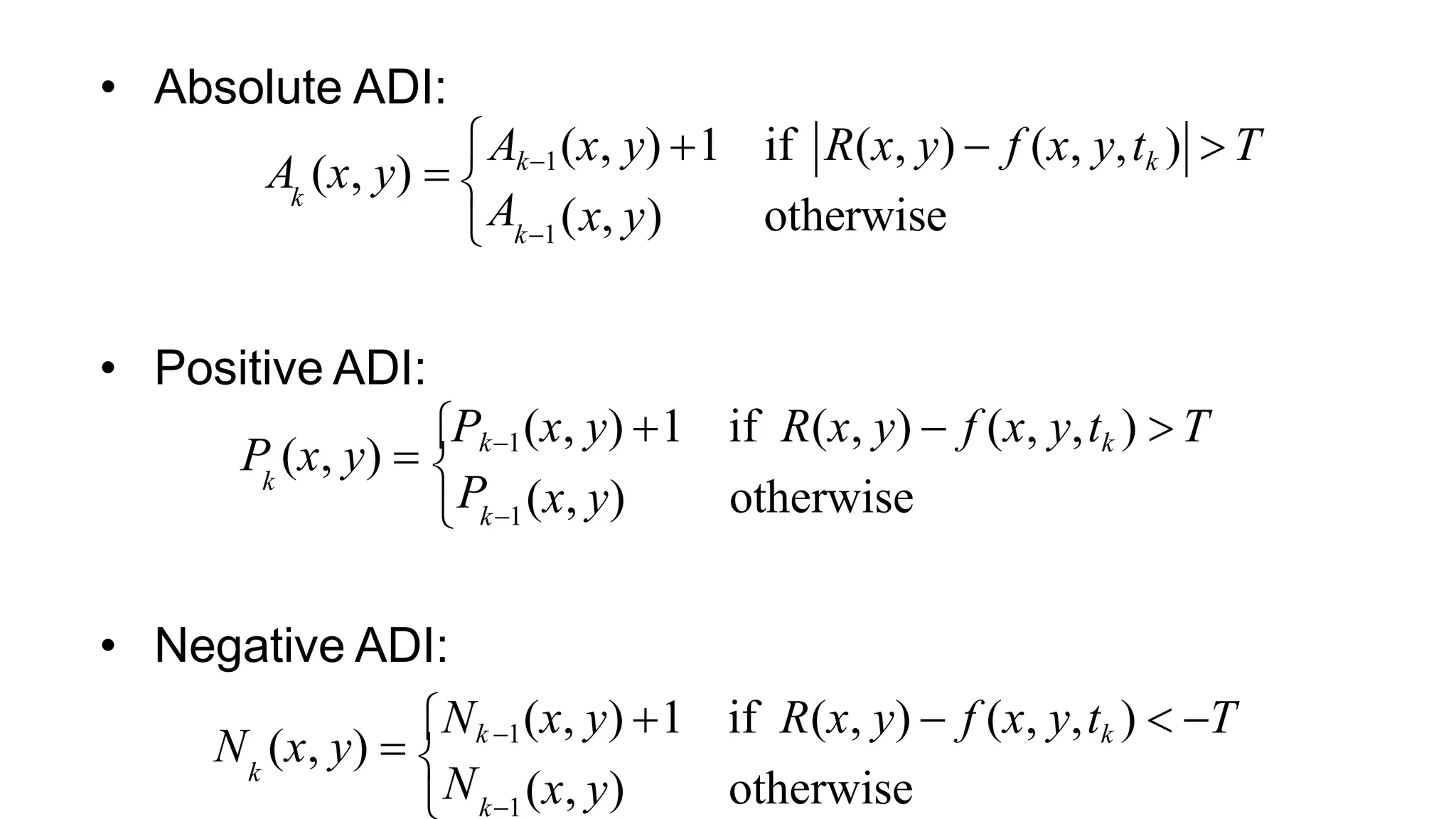
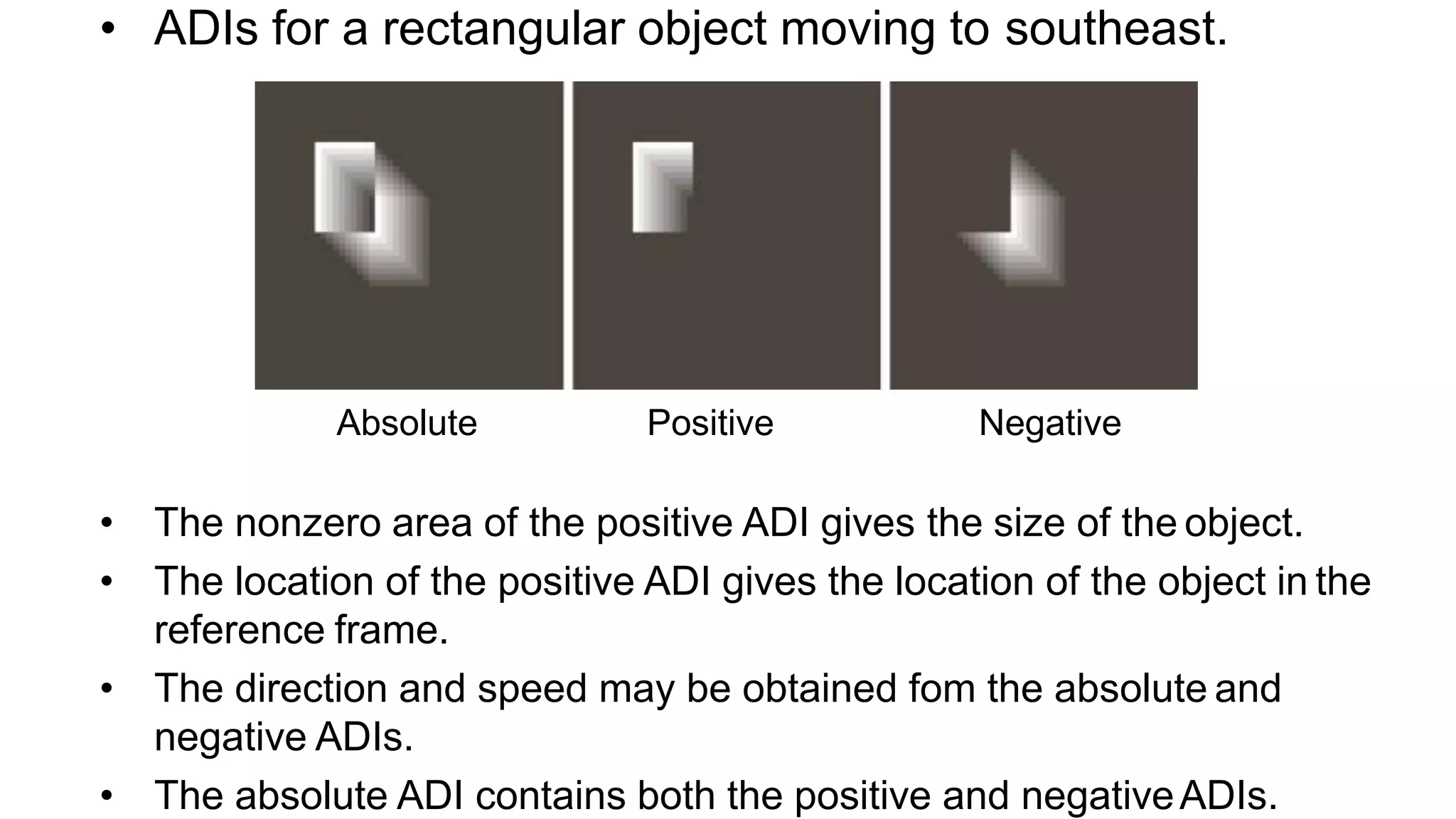
Motion is a powerful cue for image segmentation. Spatial motion segmentation involves comparing a reference image to subsequent images to create accumulative difference images (ADIs) that show pixels that differ over time. The positive ADI shows pixels that become brighter over time and can be used to identify and locate moving objects in the reference frame, while the direction and speed of objects can be seen in the absolute and negative ADIs. When backgrounds are non-stationary, the positive ADI can also be used to update the reference image by replacing background pixels that have moved.