More Related Content
Arduinoでラジコン作ったよーん - AndroidとArduinoでむすぶ新しいラジコンのすがた - Arduinoでラジコンつくったよーん - Google HackHair Tokyo 2015 - Fandroid大垣支部「Arduinoでやってみたがや」 Viewers also liked
Kumusha Takes Wiki at Wiki Indaba 2014 Hyatt Legal Plans Bravo! Awards Csse 2014 hmm presentation_ta_ed Research Literacy GEDU6170 MSVU Incept lifesaver presentation Chahine Understanding Common Study Results Donor Care X Marks the Spot Defender Direct Annual Christmas Sales Auction Gedu 6170 tiles abstracts and intro Similar to coma Study Room Arduino Workshop
coma Study Room vol.2 Arduino Workshop Platform io で シュッと arduino 開発を高速化しよう speed up your arduino development with p... 2017年01月21日 AITCシニア技術者勉強会 第3回「各種センサーを使ってみよう!~温湿度と加速度~」 Xamarin+f#で操作する Raspberry Pi Robot Arduinoで遊ぼう #2近くの物体との距離を測る IoTハンズオン勉強会 「センサーデータをクラウドに蓄積してみよう」 SFC デザイン言語WS(電子工作)第3回「電子工作の作法」 配布用Raspberry pi+arduino+scratchでフィジカルコンピューティング体験! coma Study Room Arduino Workshop
- 1.
- 2.
- 3.
- 4.
- 5.
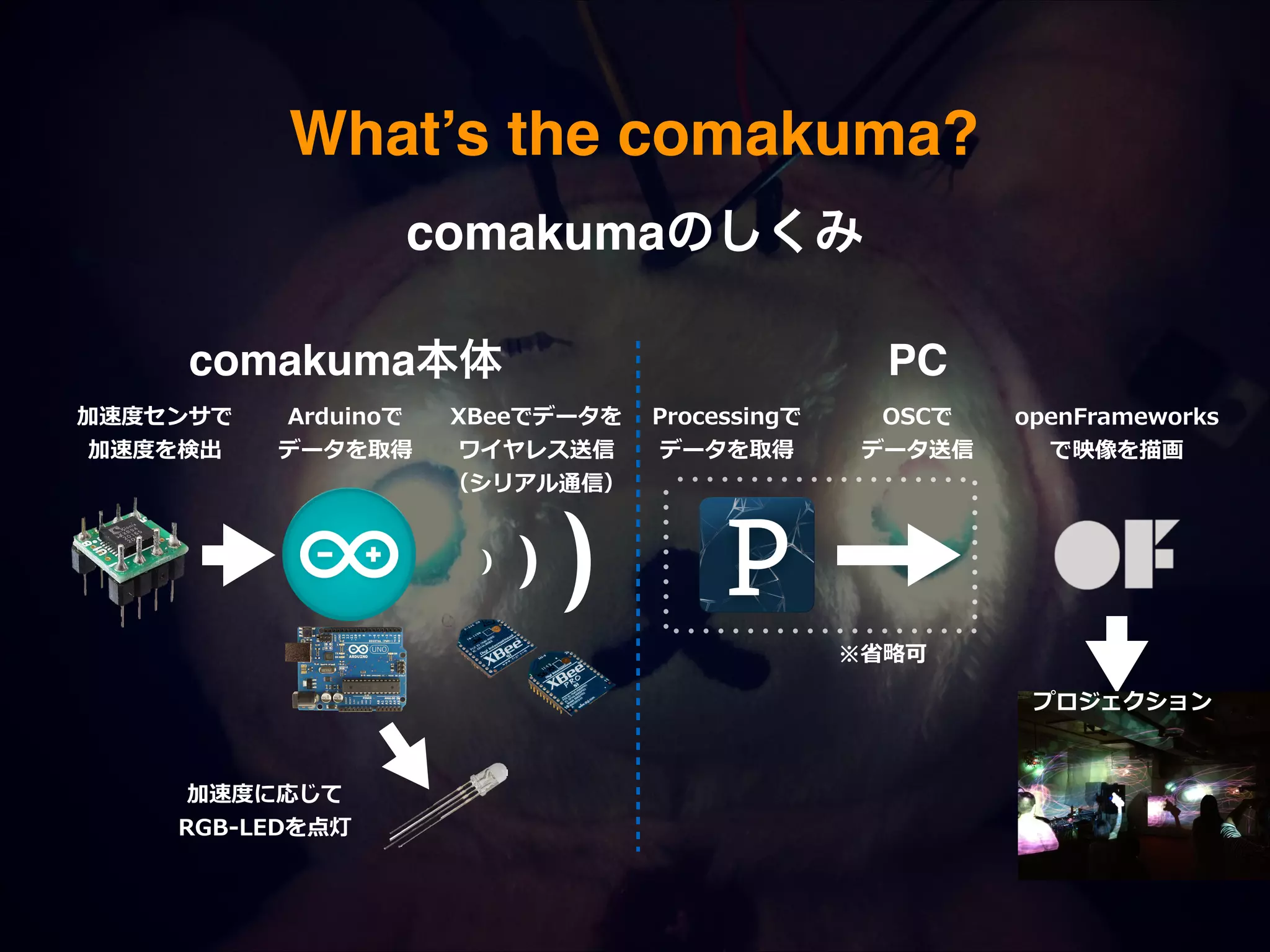
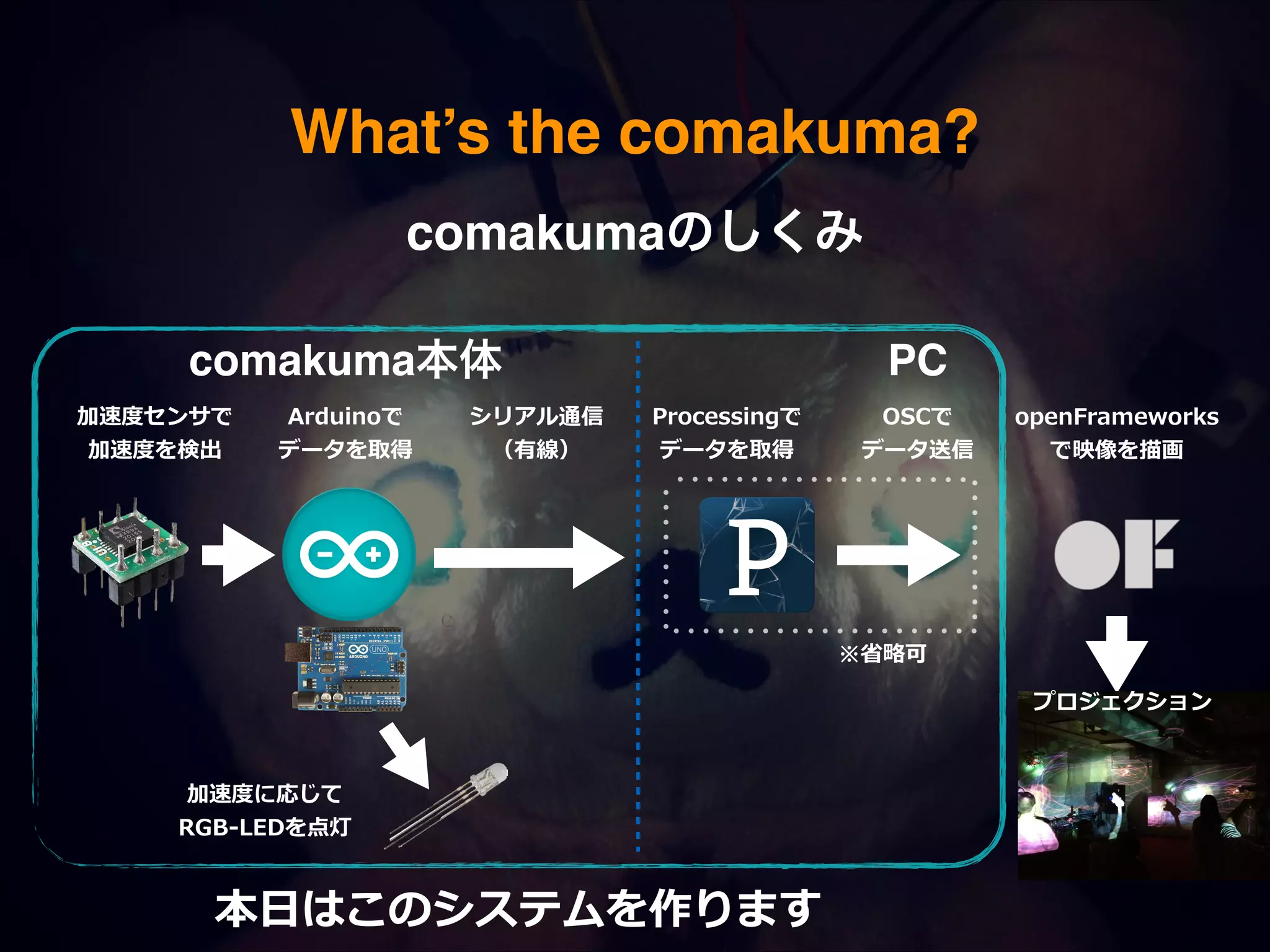
What’s the comakuma? ・前回のcomadiscotheque Ver.0.02で使用した! 加速度センサを内蔵したリラックマ型ガジェット! ! ・comakumaをだっこして踊る人々の動きをセンシングして ! フロアの映像に反映! ! ・激しく目が発光! ! ・かわいい! - 6.
- 7.
- 8.
- 9.
- 10.
- 11.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
- 18.
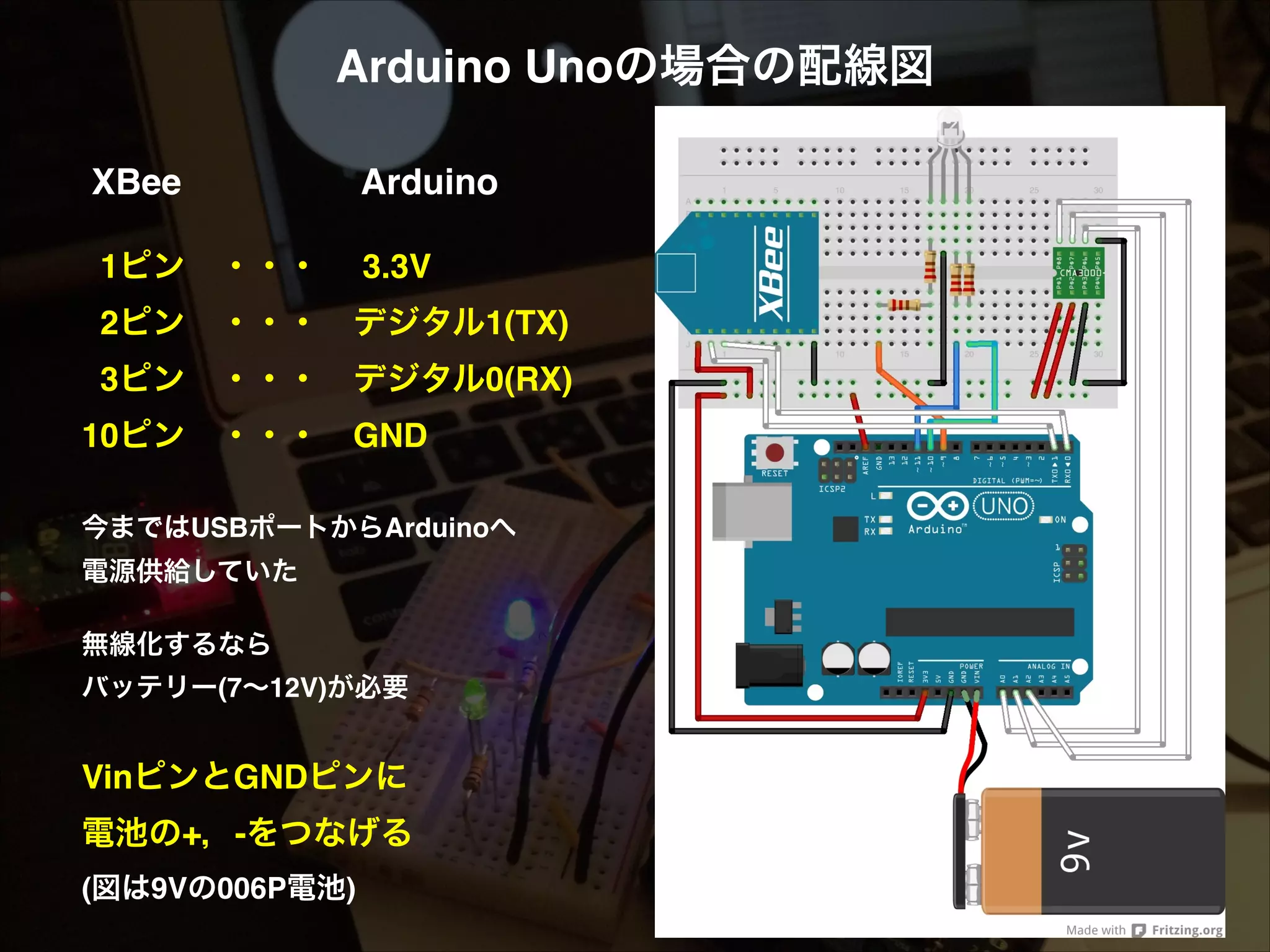
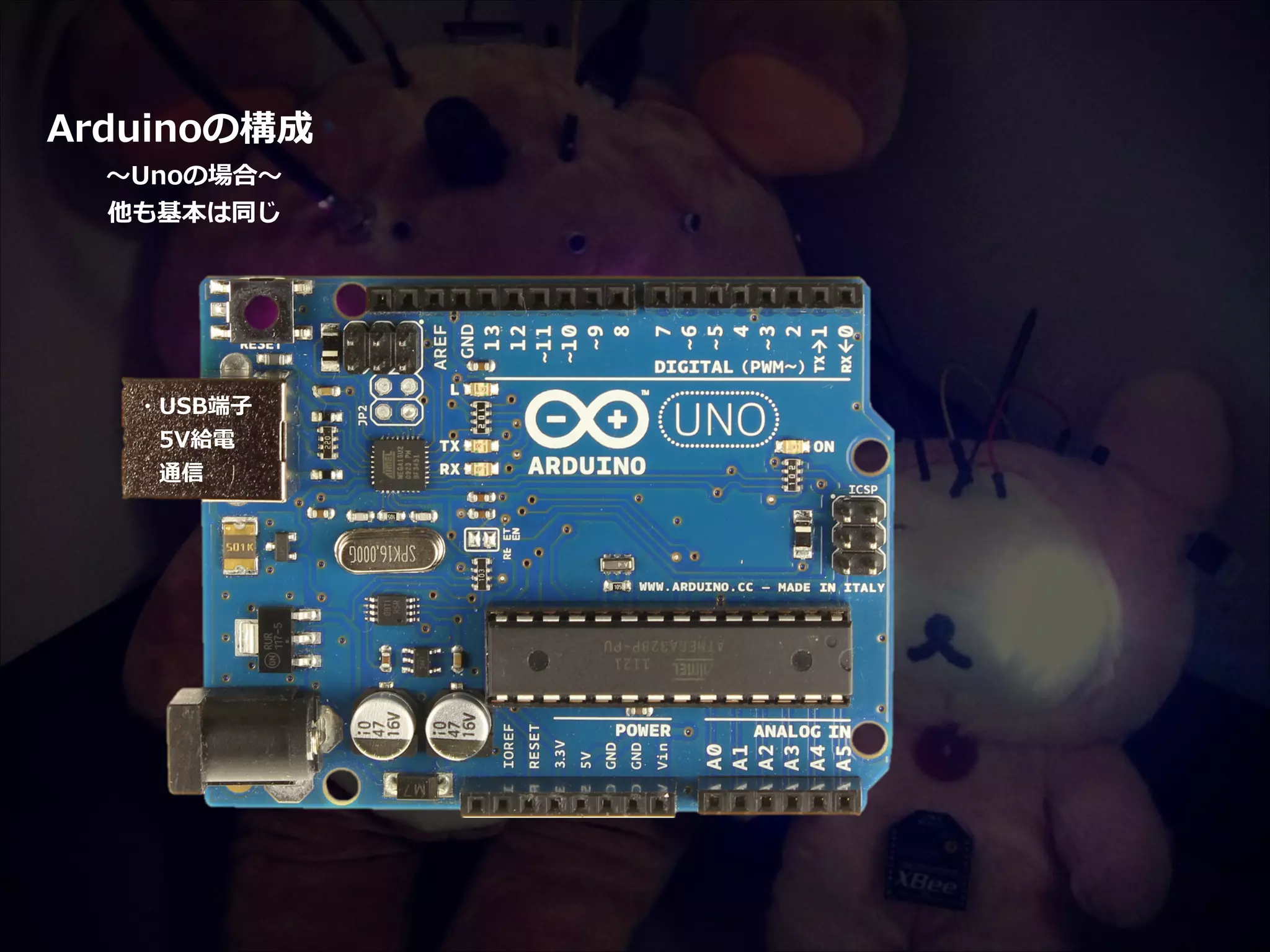
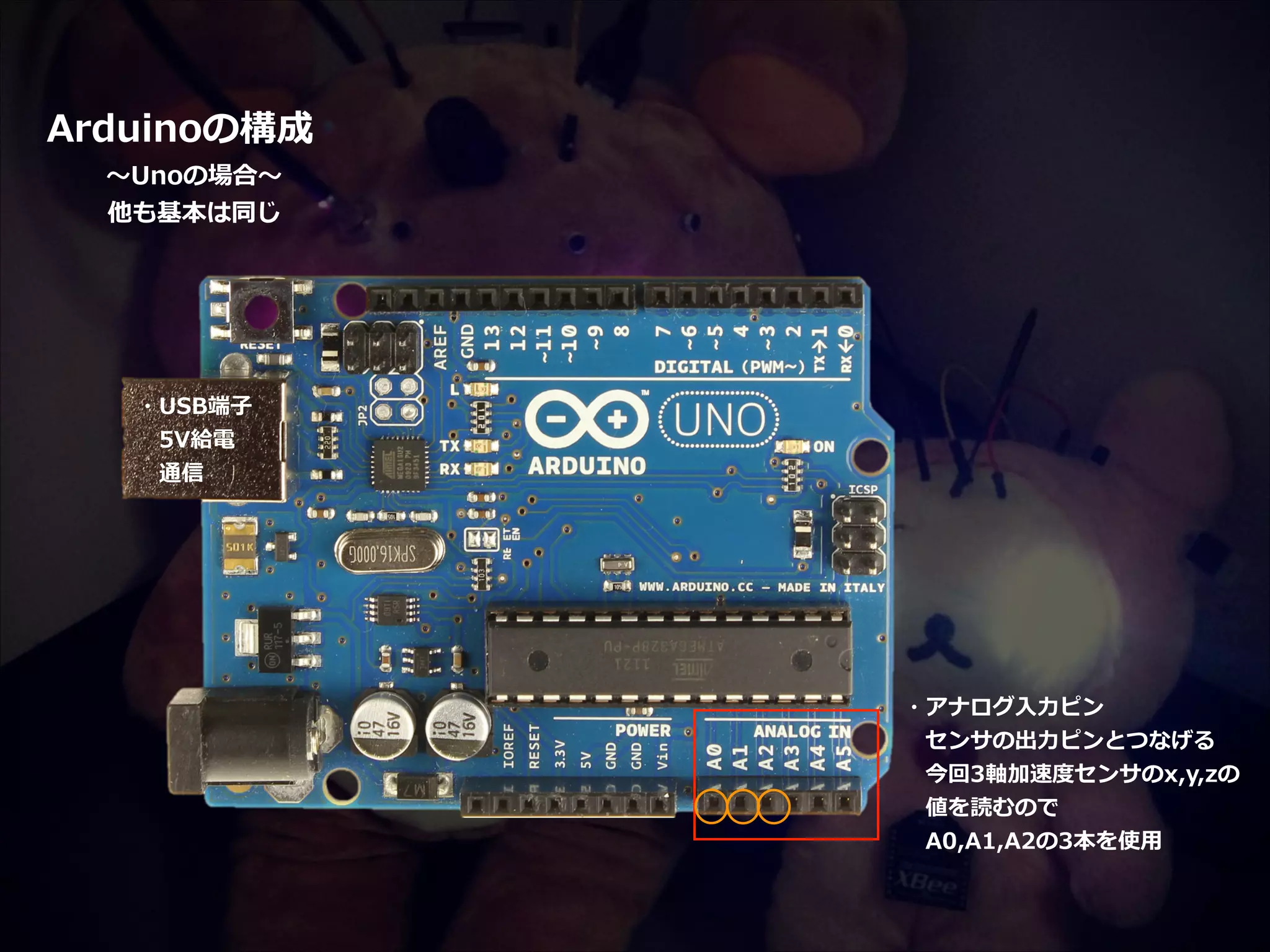
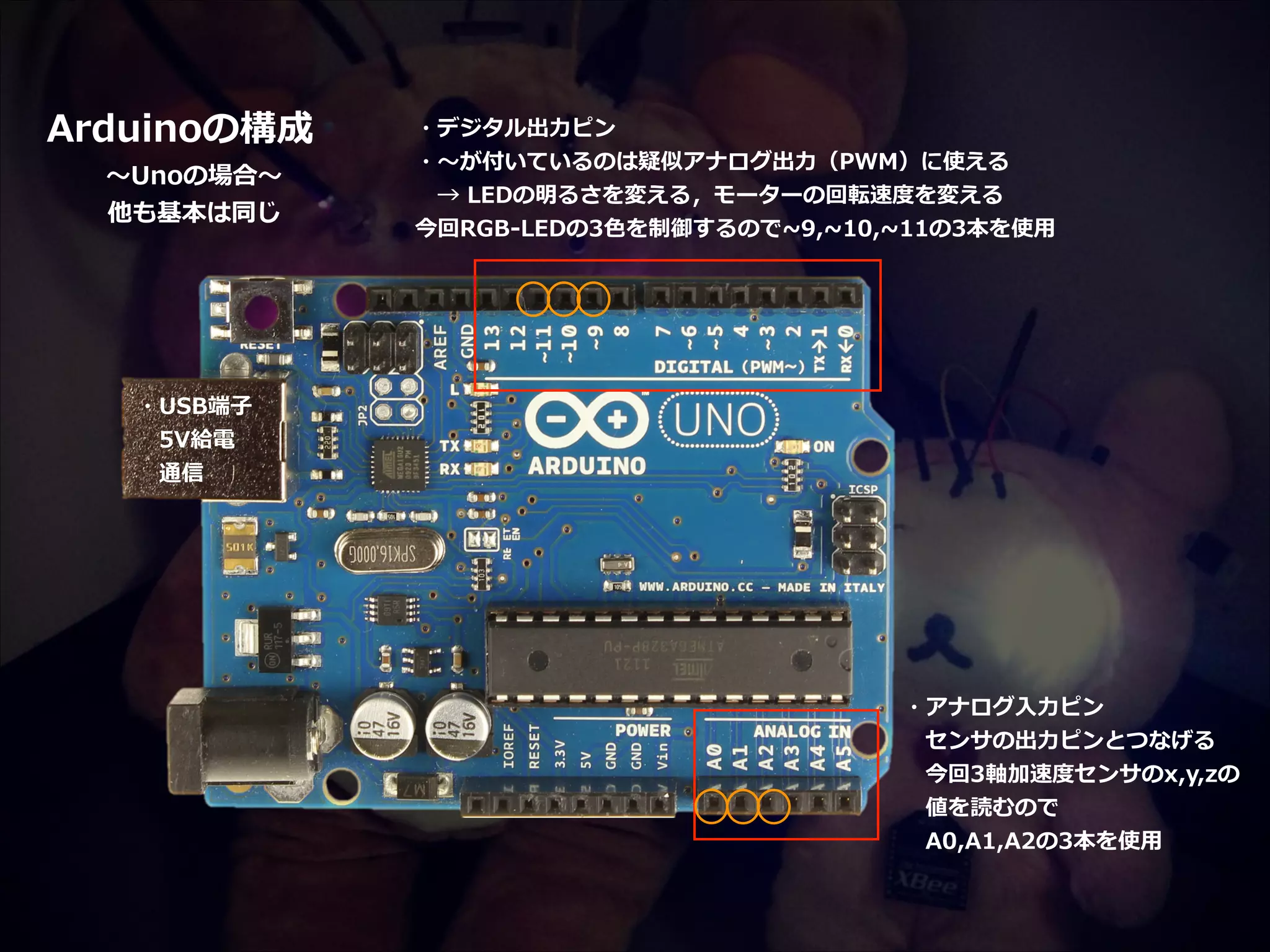
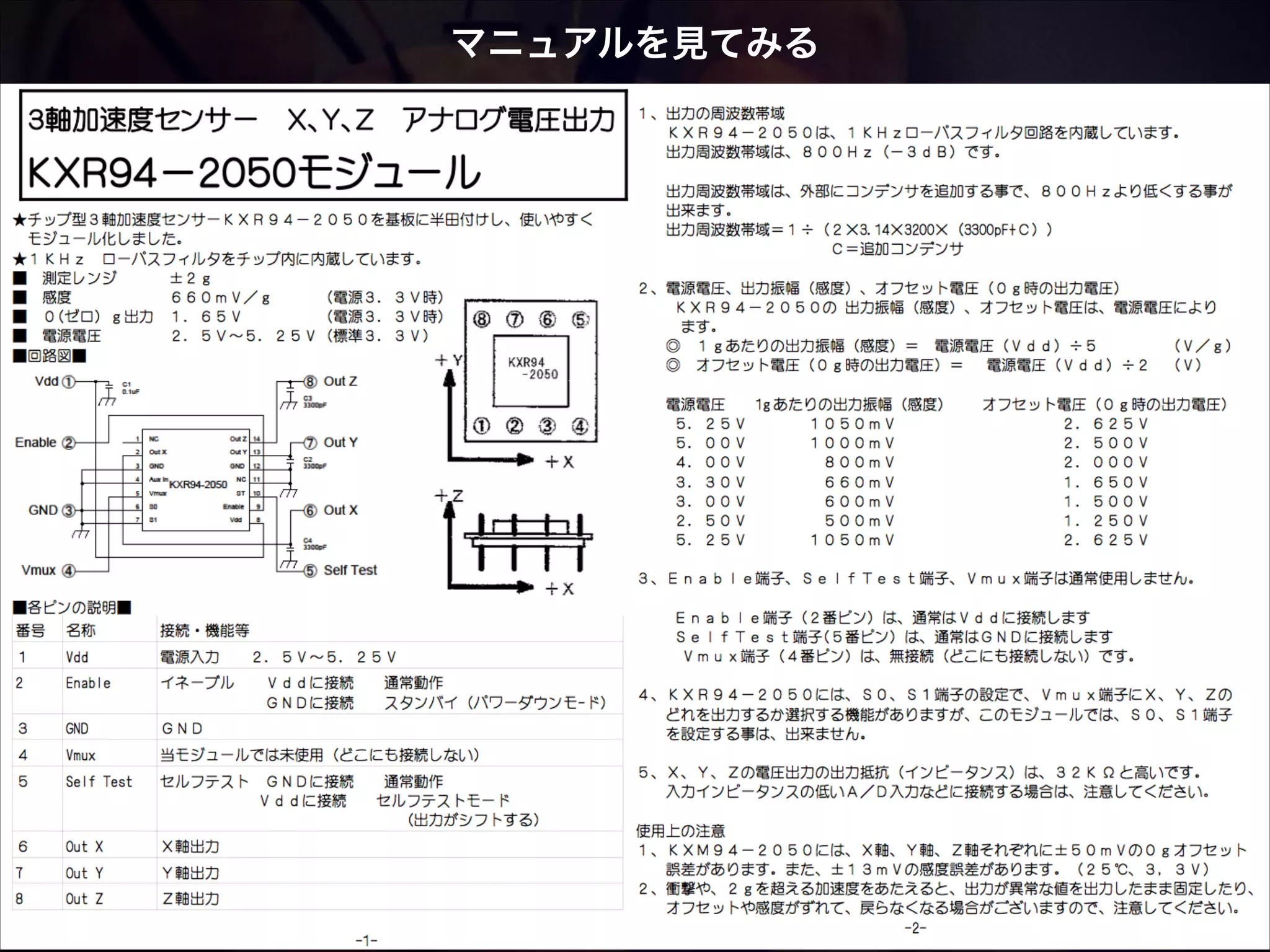
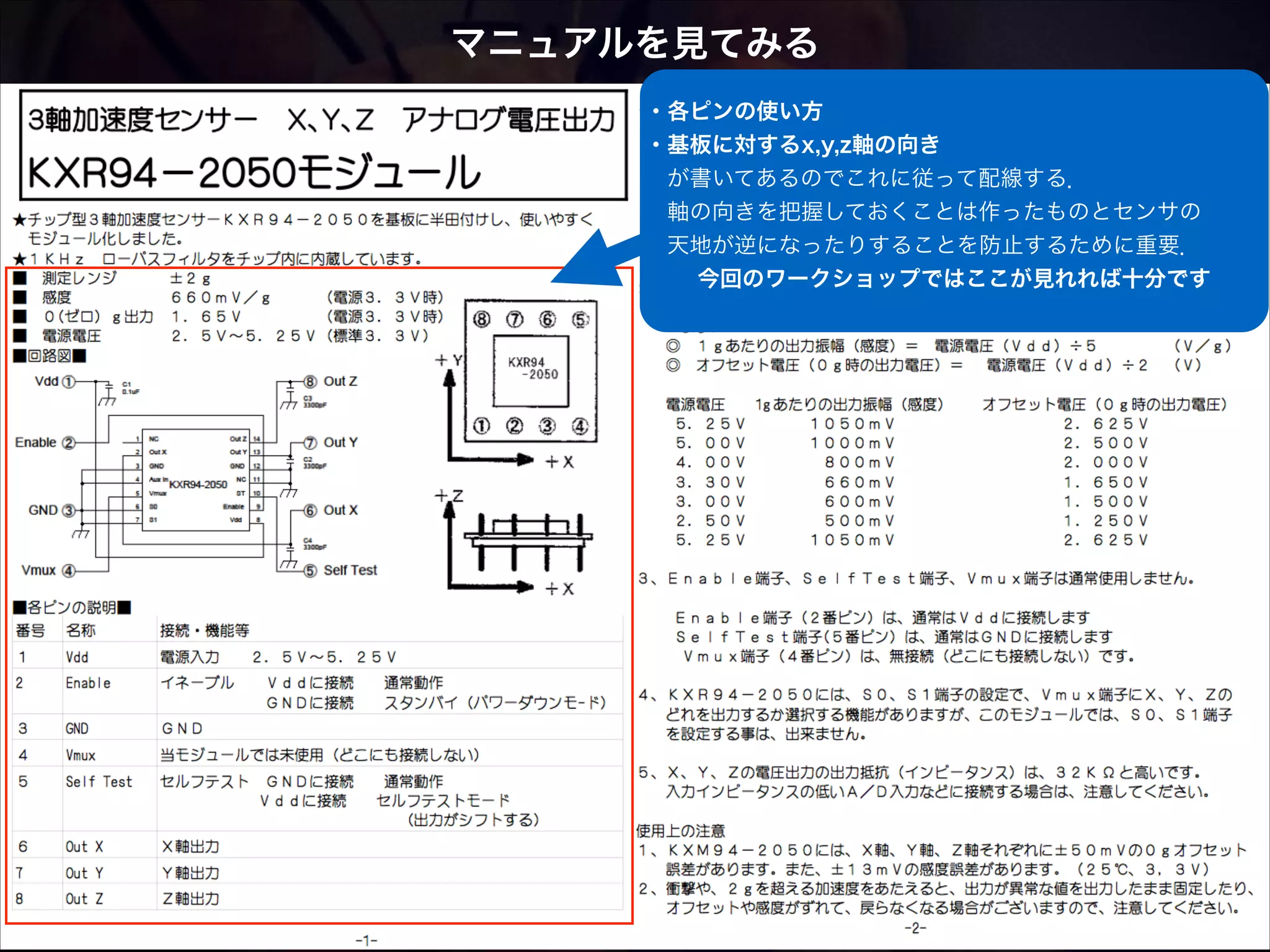
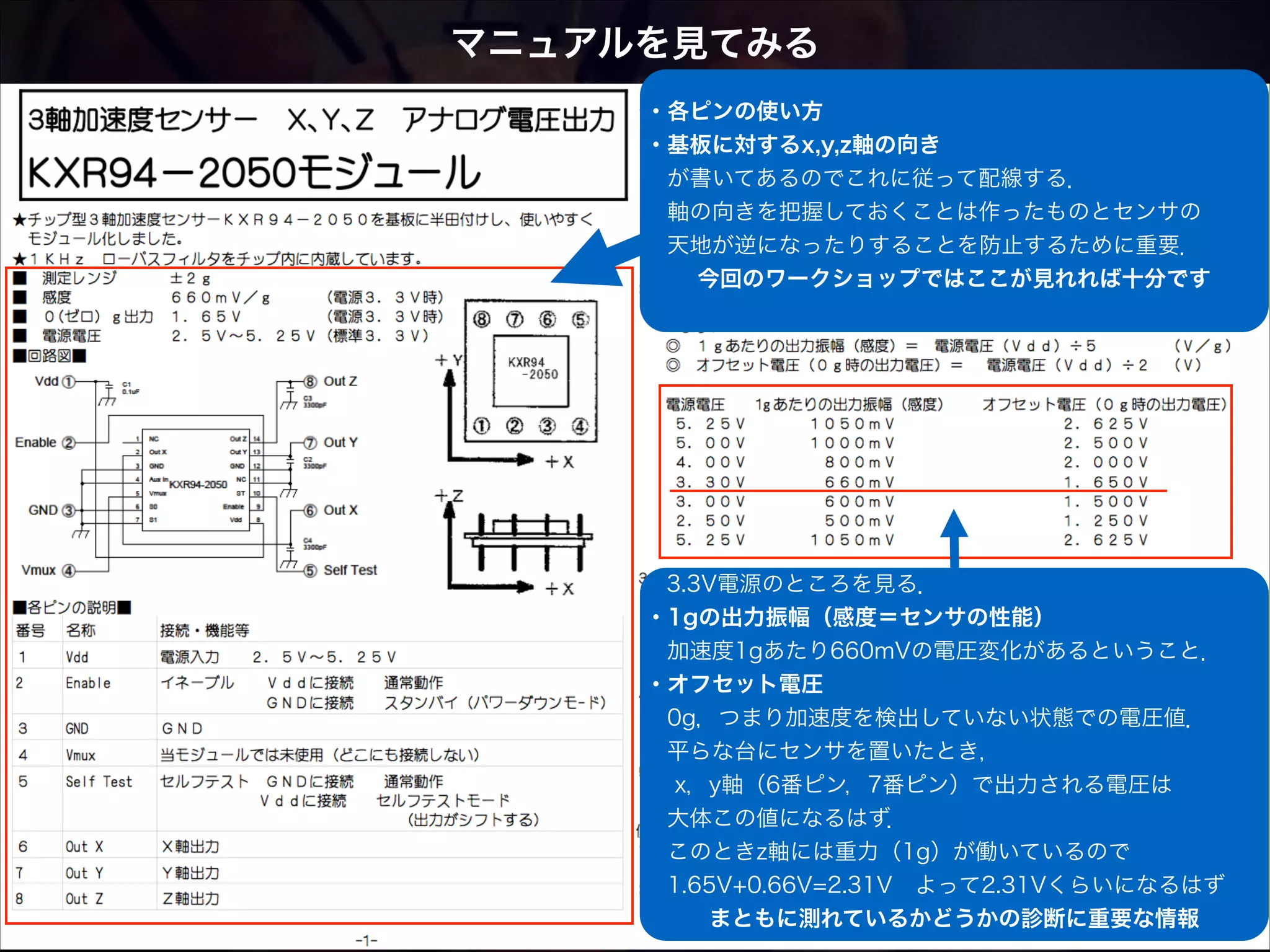
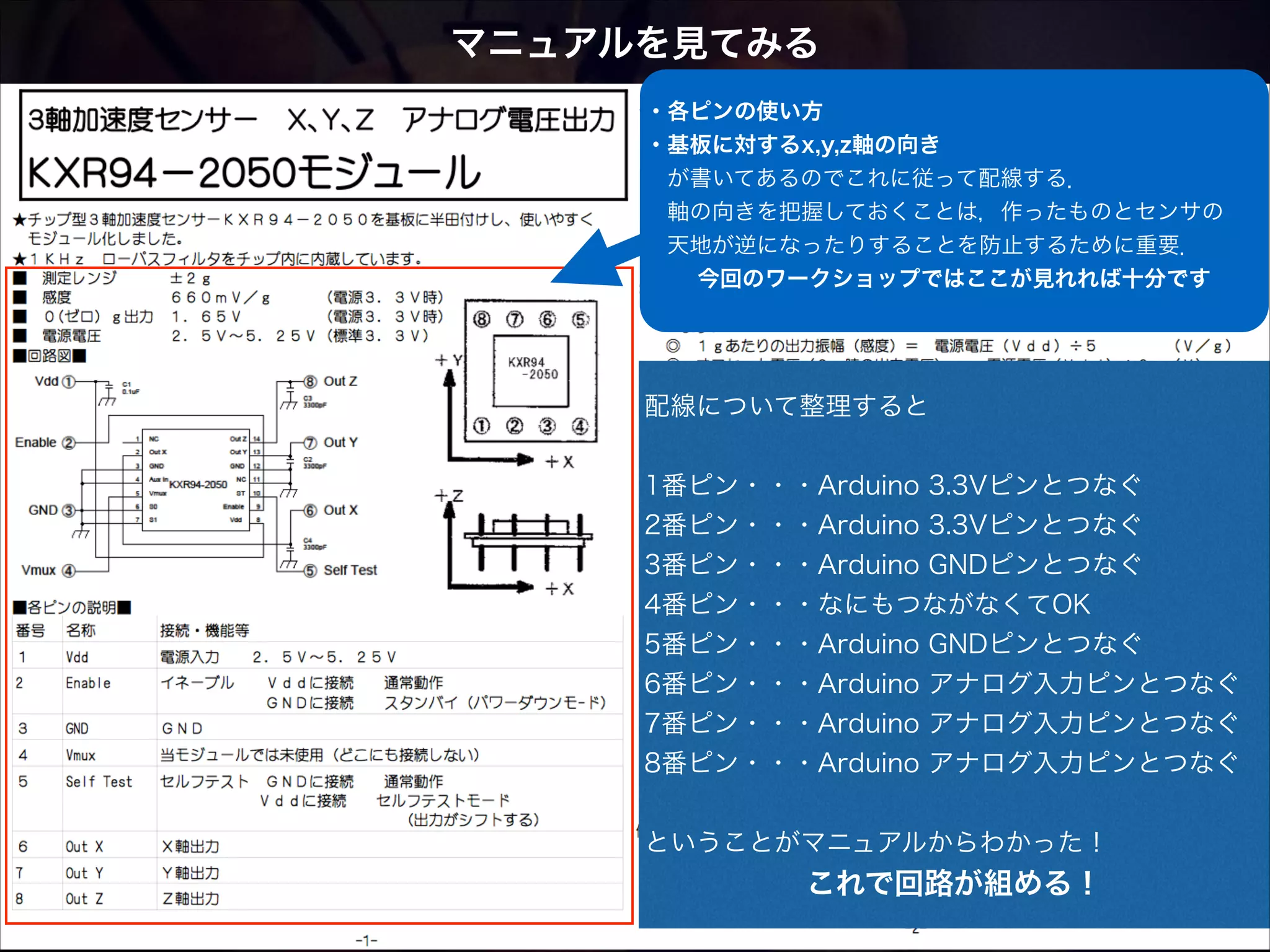
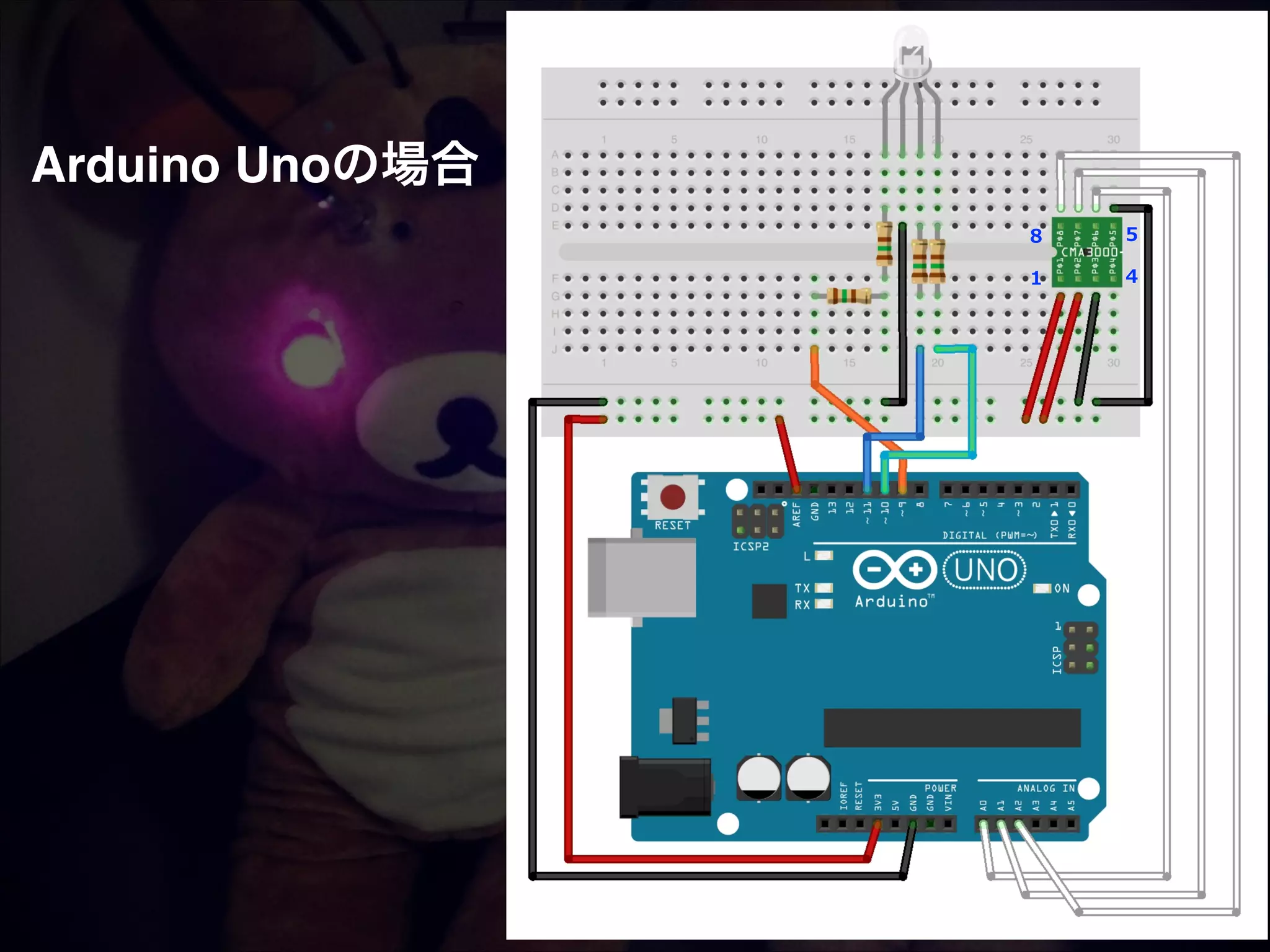
Arduinoの構成 〜~Unoの場合〜~ 他も基本は同じ ・デジタル出⼒力力ピン ・〜~が付いているのは疑似アナログ出⼒力力(PWM)に使える → LEDの明るさを変える,モーターの回転速度度を変える 今回RGB-‐‑‒LEDの3⾊色を制御するので~∼9,~∼10,~∼11の3本を使⽤用 ・USB端⼦子 5V給電 通信 ・アナログ⼊入⼒力力ピン センサの出⼒力力ピンとつなげる 今回3軸加速度度センサのx,y,zの 値を読むので A0,A1,A2の3本を使⽤用 - 19.
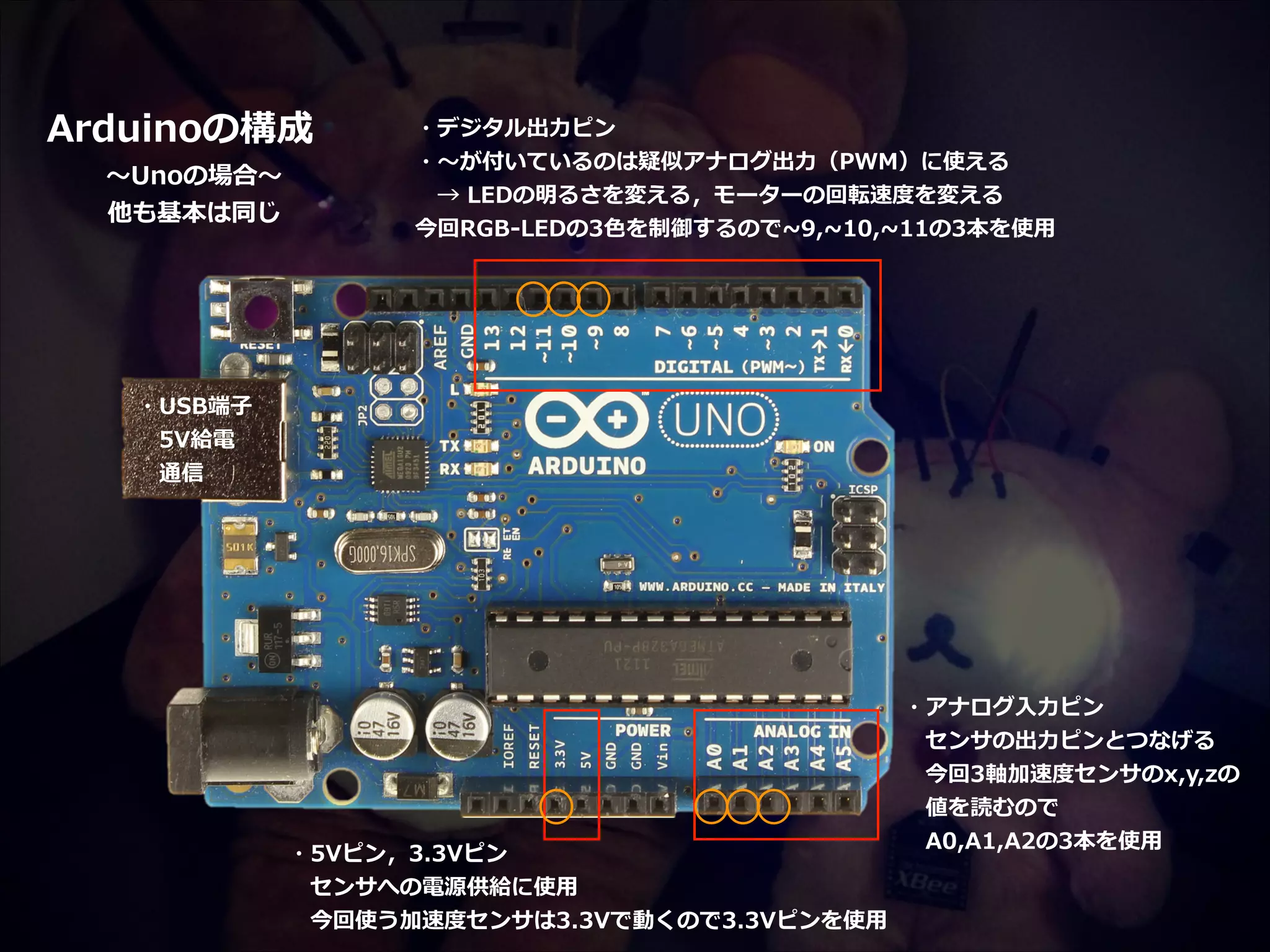
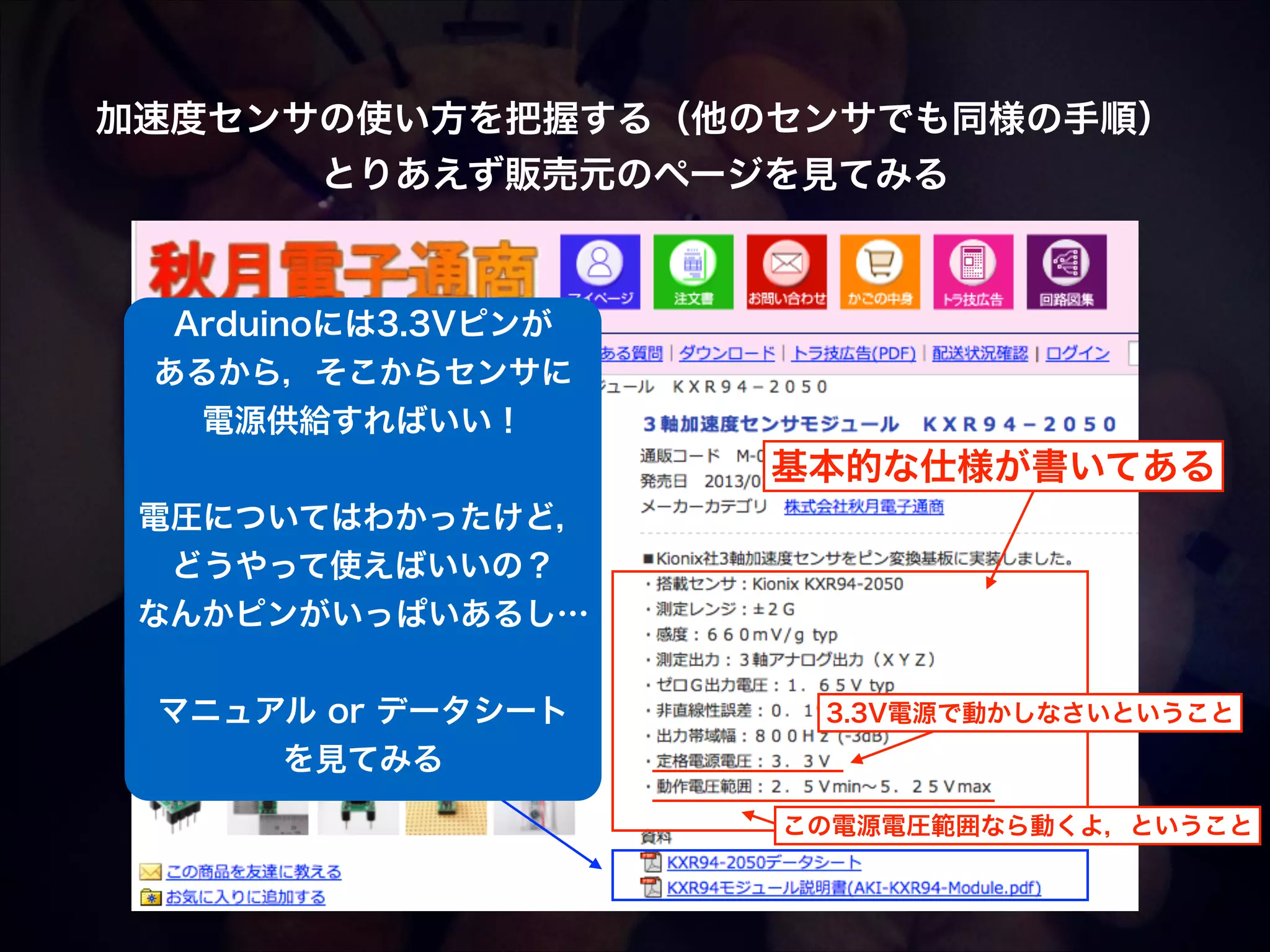
Arduinoの構成 〜~Unoの場合〜~ 他も基本は同じ ・デジタル出⼒力力ピン ・〜~が付いているのは疑似アナログ出⼒力力(PWM)に使える → LEDの明るさを変える,モーターの回転速度度を変える 今回RGB-‐‑‒LEDの3⾊色を制御するので~∼9,~∼10,~∼11の3本を使⽤用 ・USB端⼦子 5V給電 通信 ・アナログ⼊入⼒力力ピン センサの出⼒力力ピンとつなげる 今回3軸加速度度センサのx,y,zの 値を読むので ・5Vピン,3.3Vピン センサへの電源供給に使⽤用 今回使う加速度度センサは3.3Vで動くので3.3Vピンを使⽤用 A0,A1,A2の3本を使⽤用 - 20.
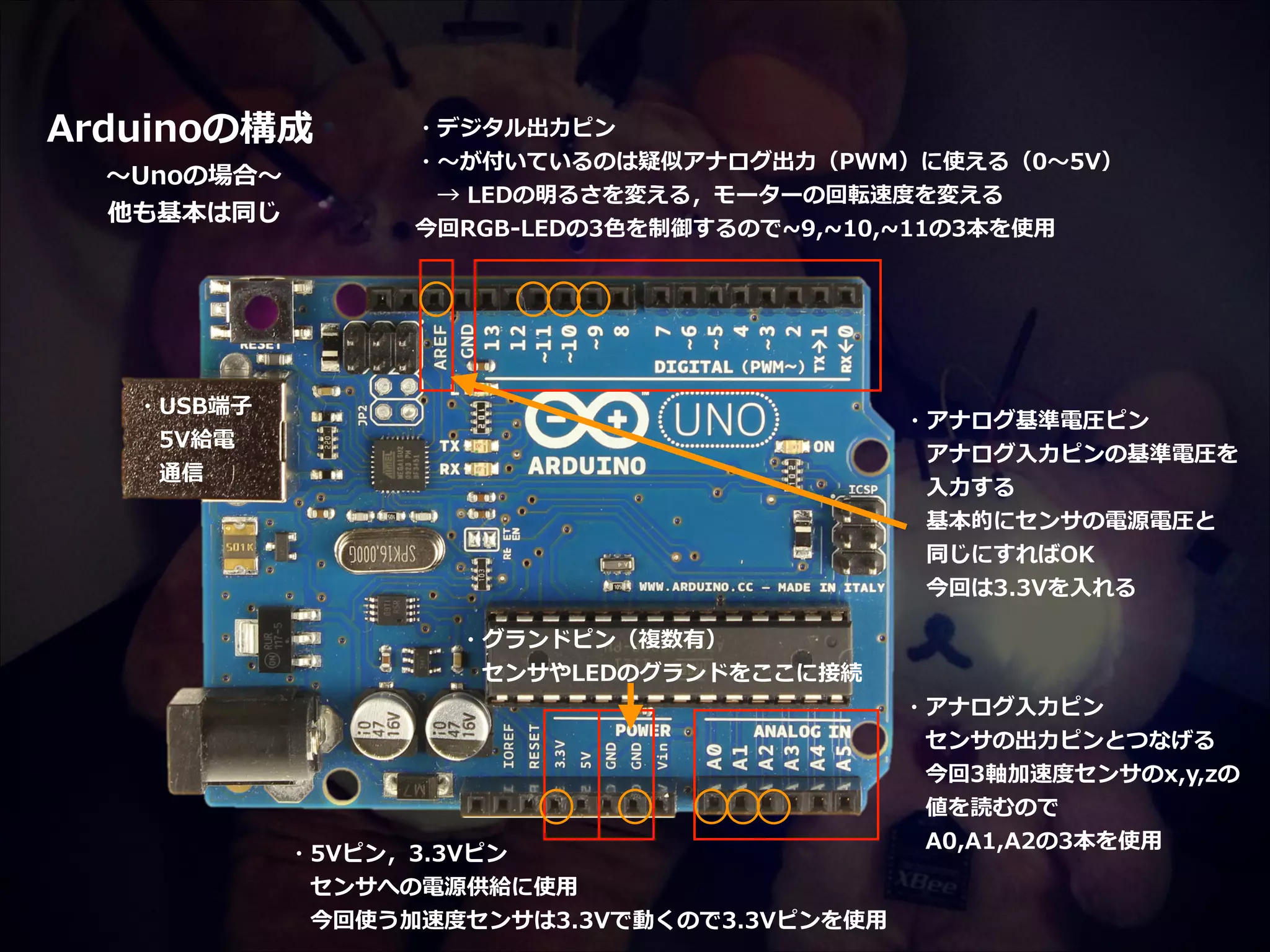
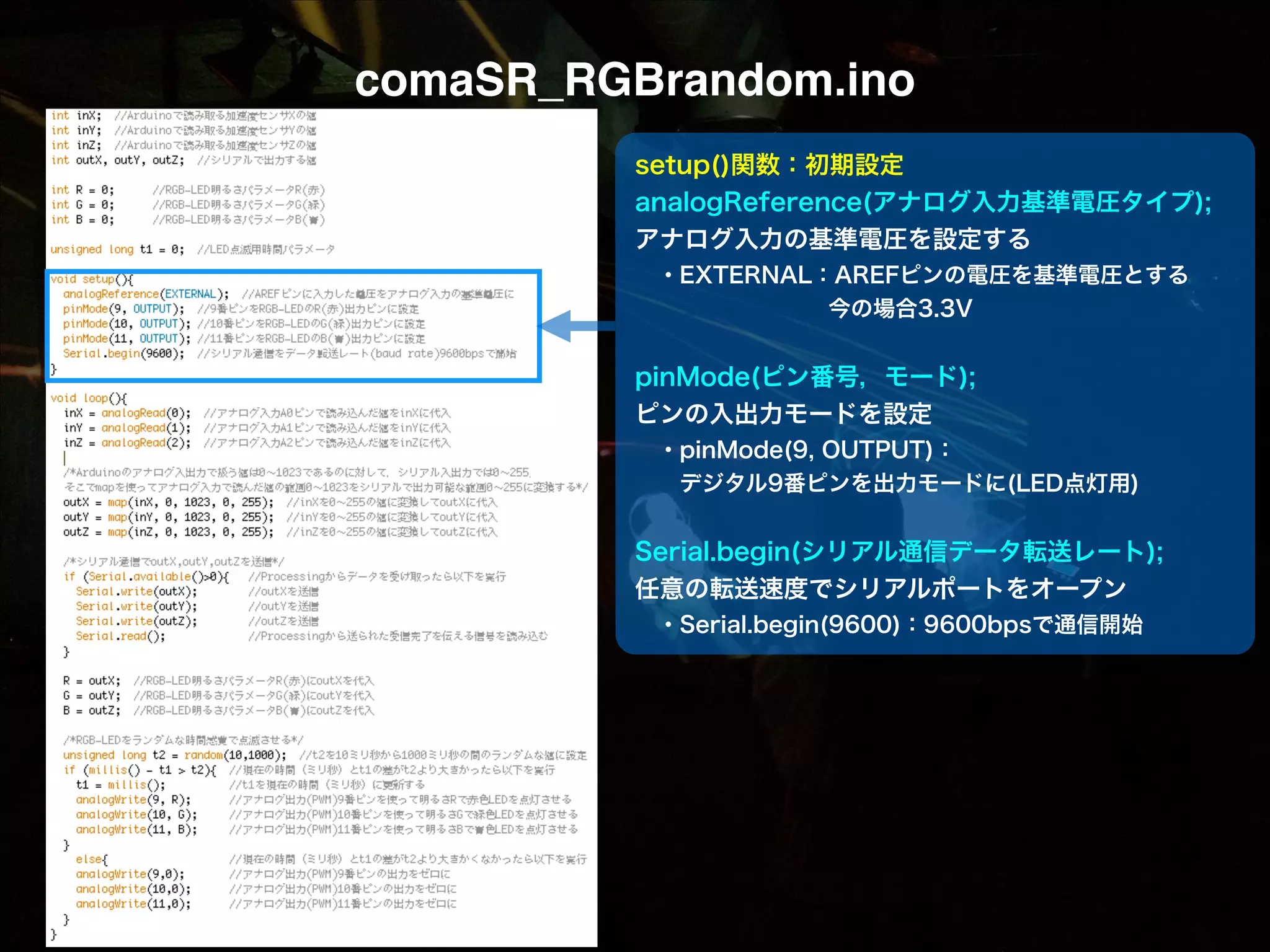
Arduinoの構成 〜~Unoの場合〜~ 他も基本は同じ ・デジタル出⼒力力ピン ・〜~が付いているのは疑似アナログ出⼒力力(PWM)に使える(0〜~5V) → LEDの明るさを変える,モーターの回転速度度を変える 今回RGB-‐‑‒LEDの3⾊色を制御するので~∼9,~∼10,~∼11の3本を使⽤用 ・USB端⼦子 5V給電 通信 ・アナログ基準電圧ピン
アナログ⼊入⼒力力ピンの基準電圧を ⼊入⼒力力する 基本的にセンサの電源電圧と 同じにすればOK 今回は3.3Vを⼊入れる ・グランドピン(複数有)
センサやLEDのグランドをここに接続 ・アナログ⼊入⼒力力ピン センサの出⼒力力ピンとつなげる 今回3軸加速度度センサのx,y,zの 値を読むので ・5Vピン,3.3Vピン センサへの電源供給に使⽤用 今回使う加速度度センサは3.3Vで動くので3.3Vピンを使⽤用 A0,A1,A2の3本を使⽤用 - 21.
- 22.
- 23.
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
- 32.
- 33.
- 34.
- 35.
- 36.
- 37.
- 38.
- 39.
- 40.
- 41.
- 42.
- 43.
- 44.
- 45.
- 46.
- 47.
- 48.
- 49.
- 50.
- 51.
- 52.
- 53.
- 54.
- 55.
- 56.
- 57.
- 58.
- 59.
- 60.
- 61.
- 62.
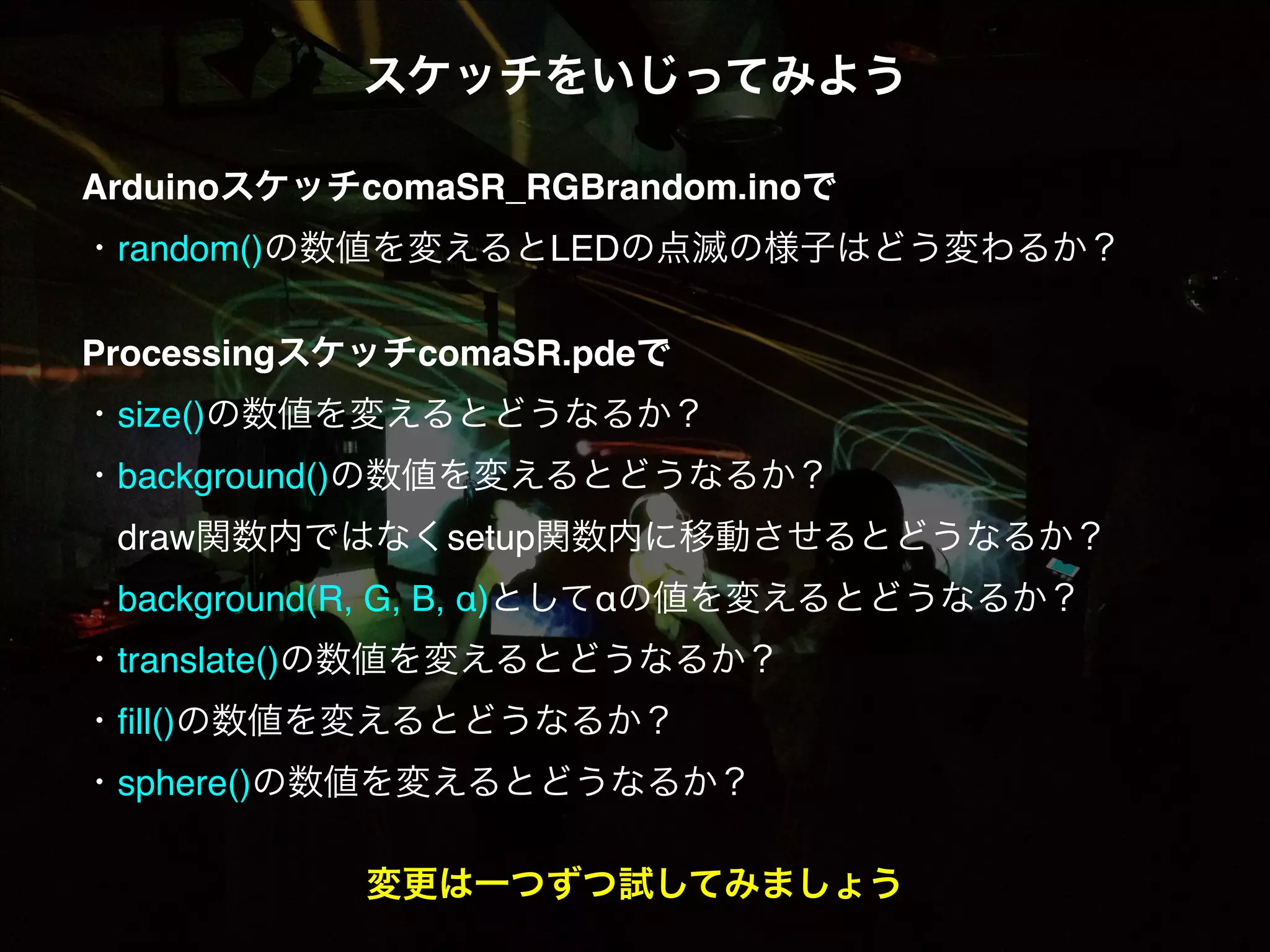
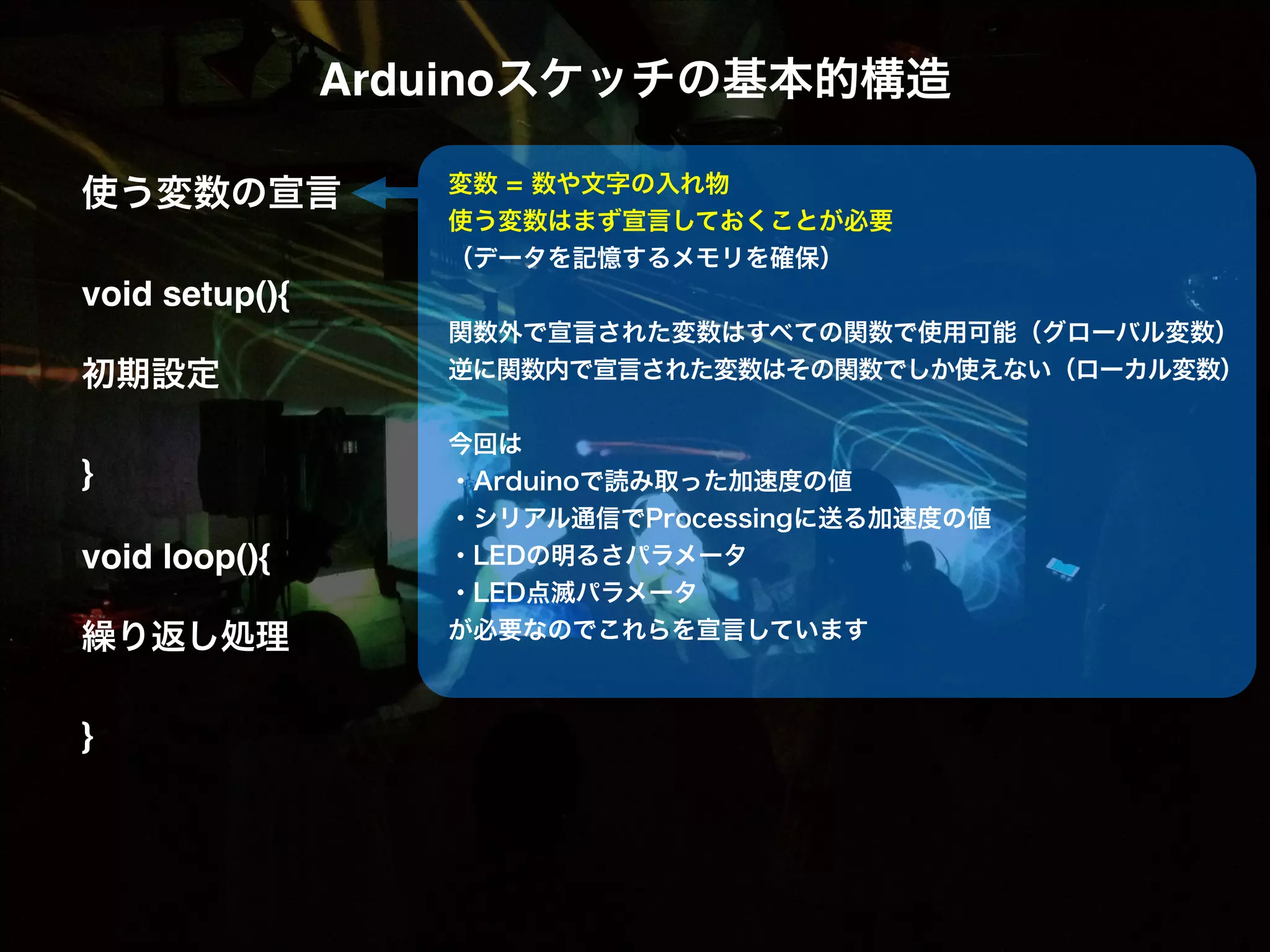
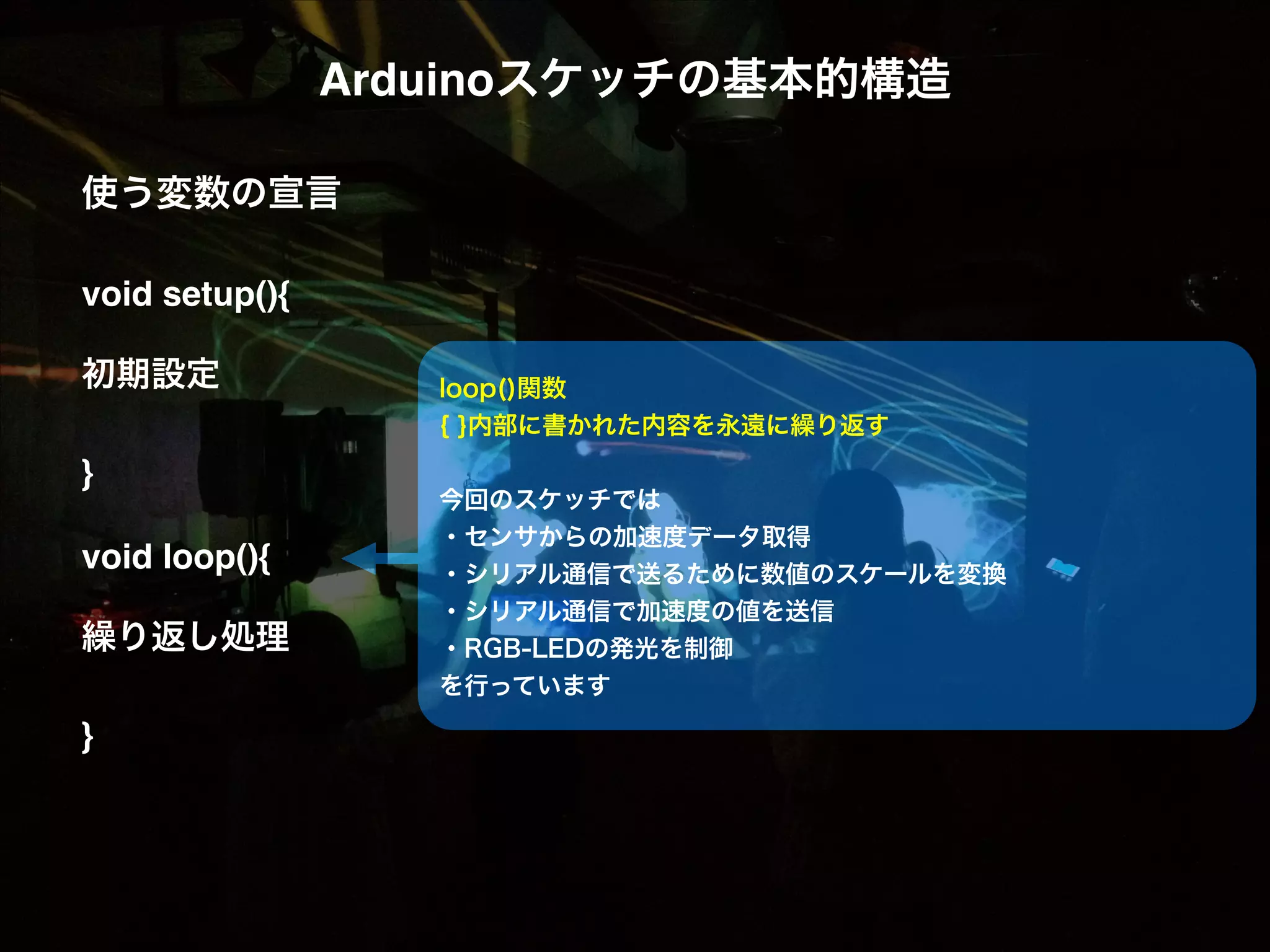
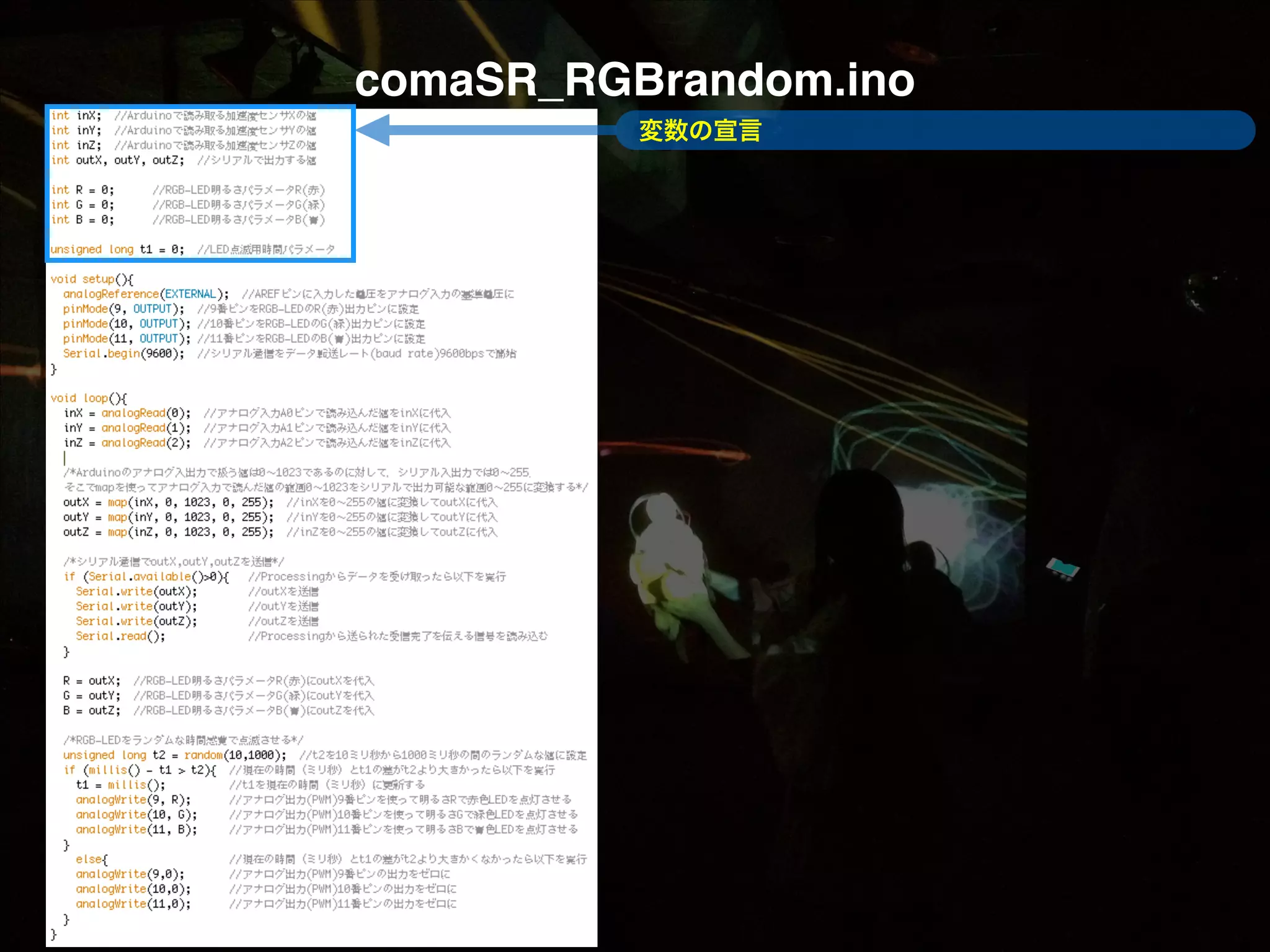
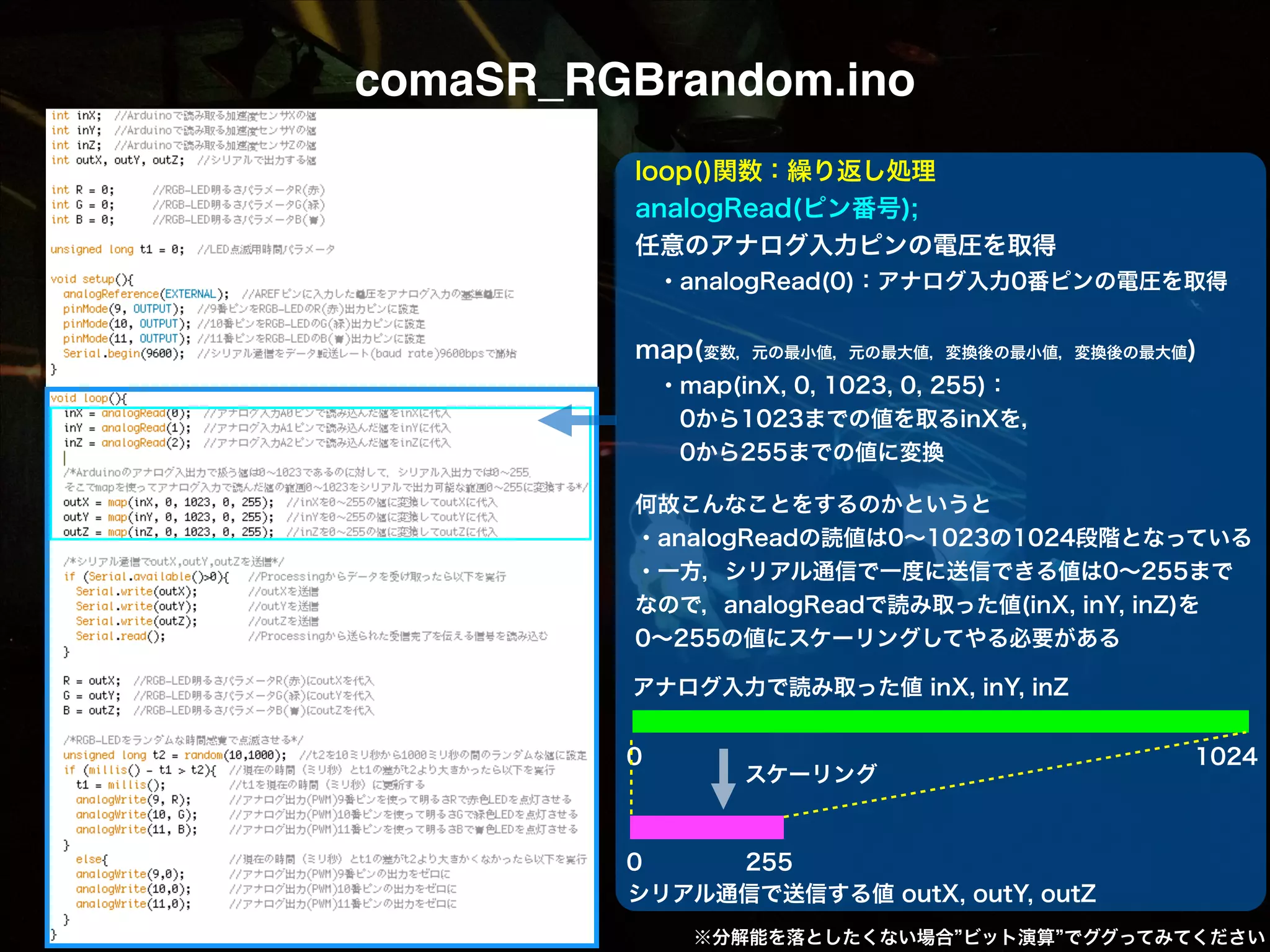
comaSR_RGBrandom.ino loop()関数:繰り返し処理 analogRead(ピン番号); 任意のアナログ入力ピンの電圧を取得 ・analogRead(0):アナログ入力0番ピンの電圧を取得 ! map(変数,元の最小値,元の最大値,変換後の最小値,変換後の最大値) ・map(inX, 0, 1023,0, 255): 0から1023までの値を取るinXを, 0から255までの値に変換 ! 何故こんなことをするのかというと ・analogReadの読値は0∼1023の1024段階となっている ・一方,シリアル通信で一度に送信できる値は0∼255まで なので,analogReadで読み取った値(inX, inY, inZ)を 0∼255の値にスケーリングしてやる必要がある ! アナログ入力で読み取った値 inX, inY, inZ 0 スケーリング 1024 255 0 シリアル通信で送信する値 outX, outY, outZ ※分解能を落としたくない場合 ビット演算 でググってみてください - 63.
- 64.
- 65.
- 66.
- 67.
- 68.
- 69.
- 70.
- 71.
- 72.
- 73.
- 74.
- 75.
- 76.
- 77.
- 78.
- 79.
- 80.
- 81.
- 82.
- 83.
- 84.
- 85.
- 86.
- 87.
- 88.
- 89.
- 90.
- 91.
- 92.
- 93.
- 94.
- 95.
- 96.
- 97.
- 98.
- 99.
- 100.
- 101.






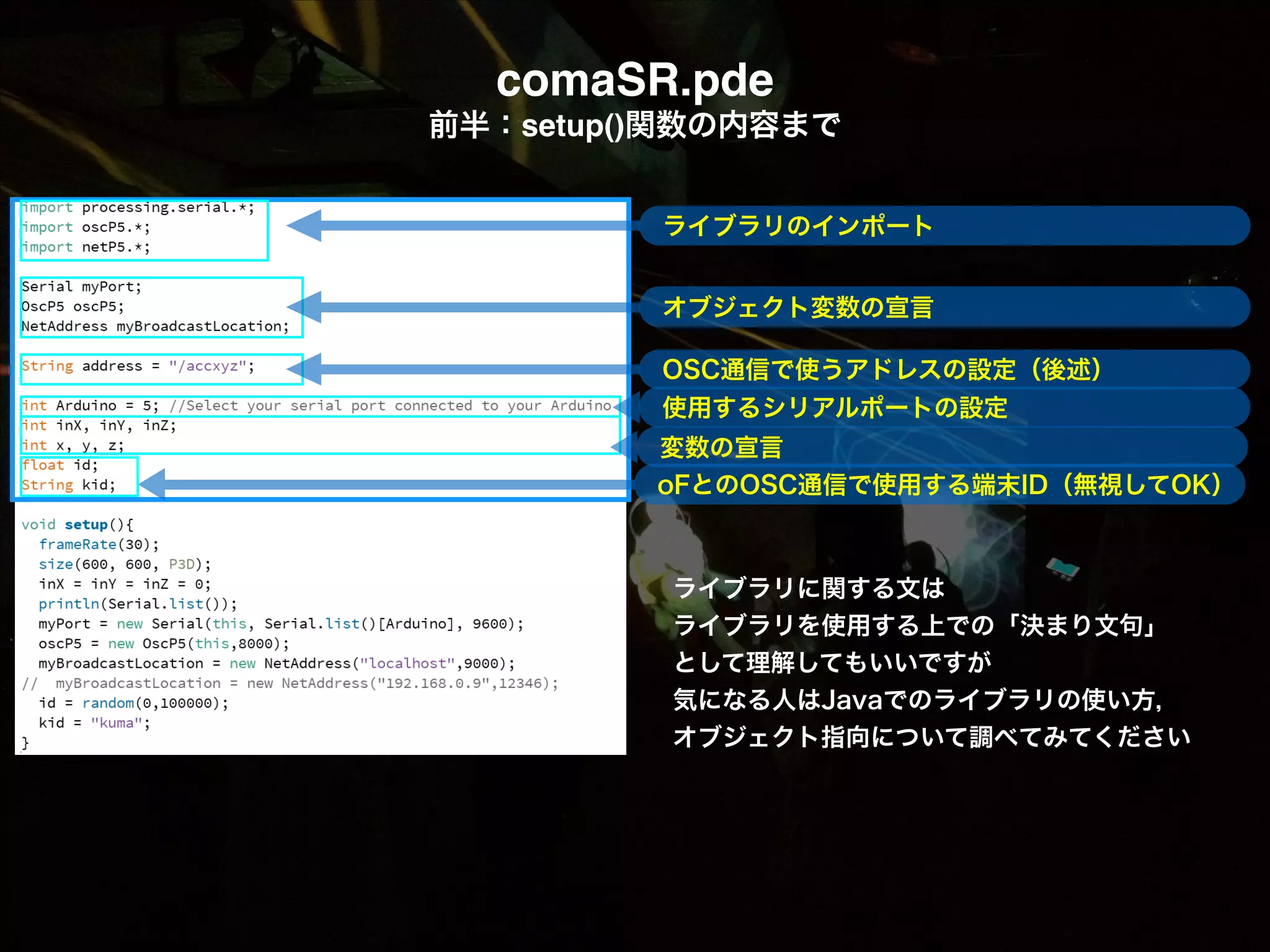
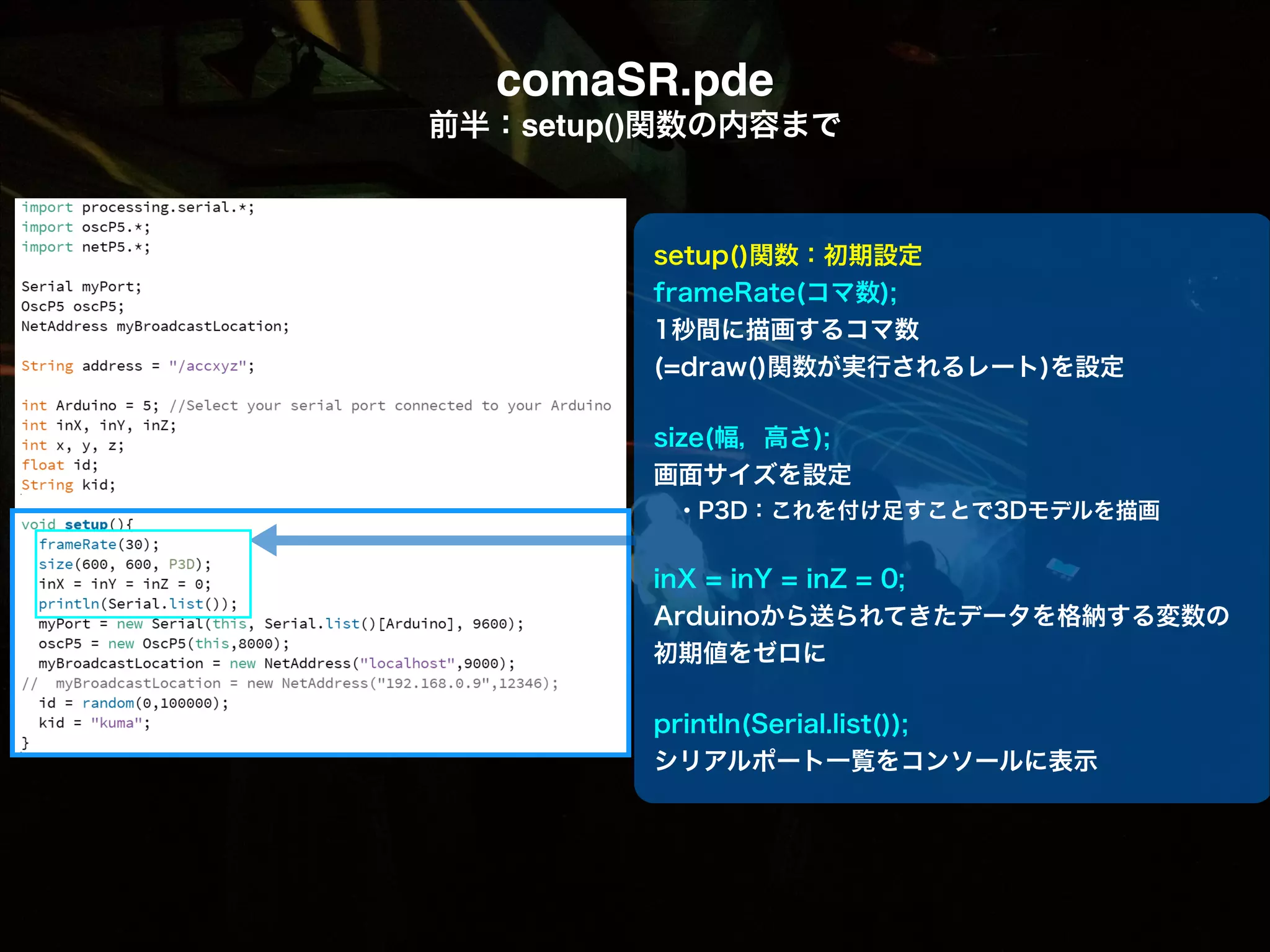
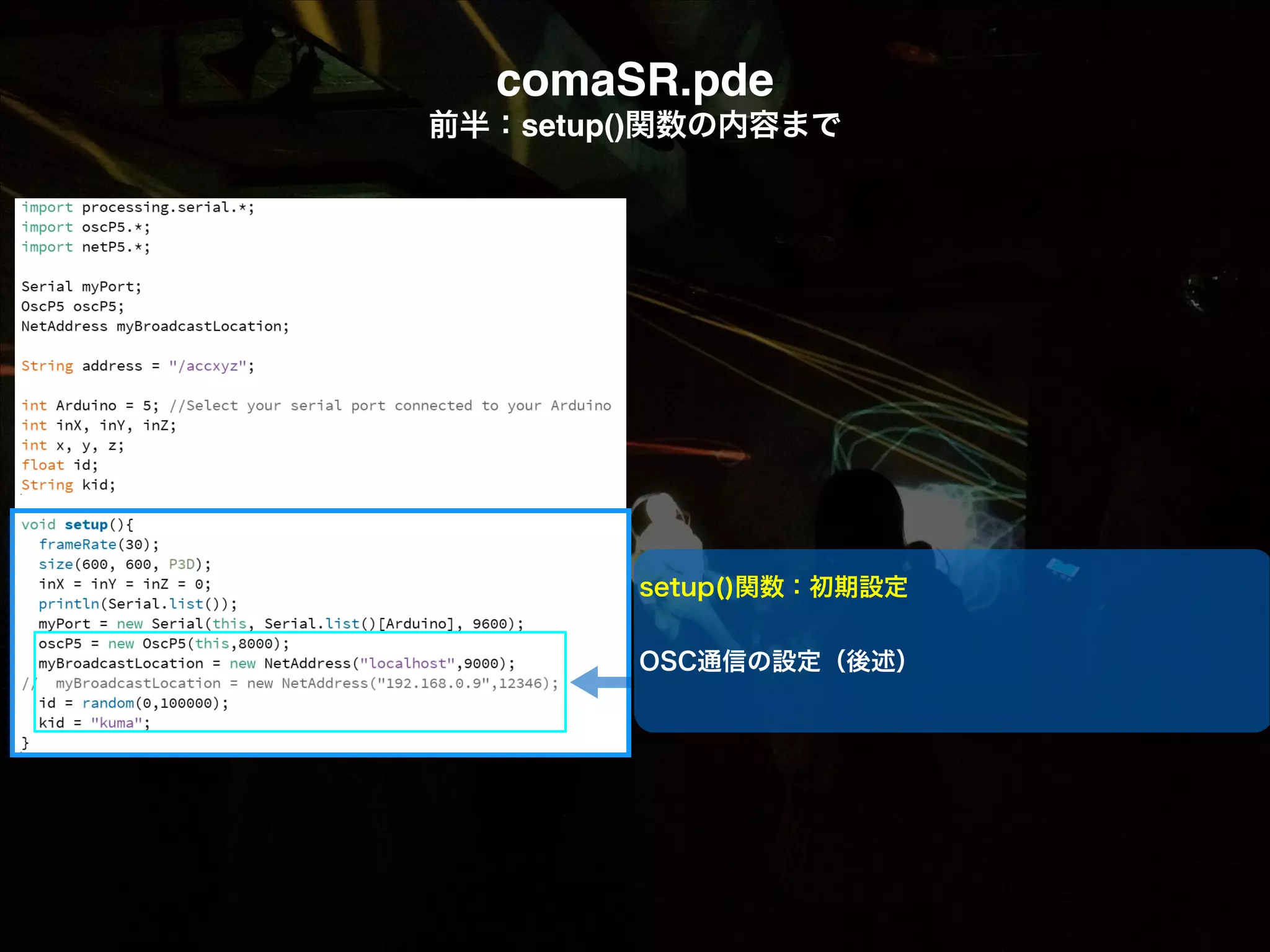
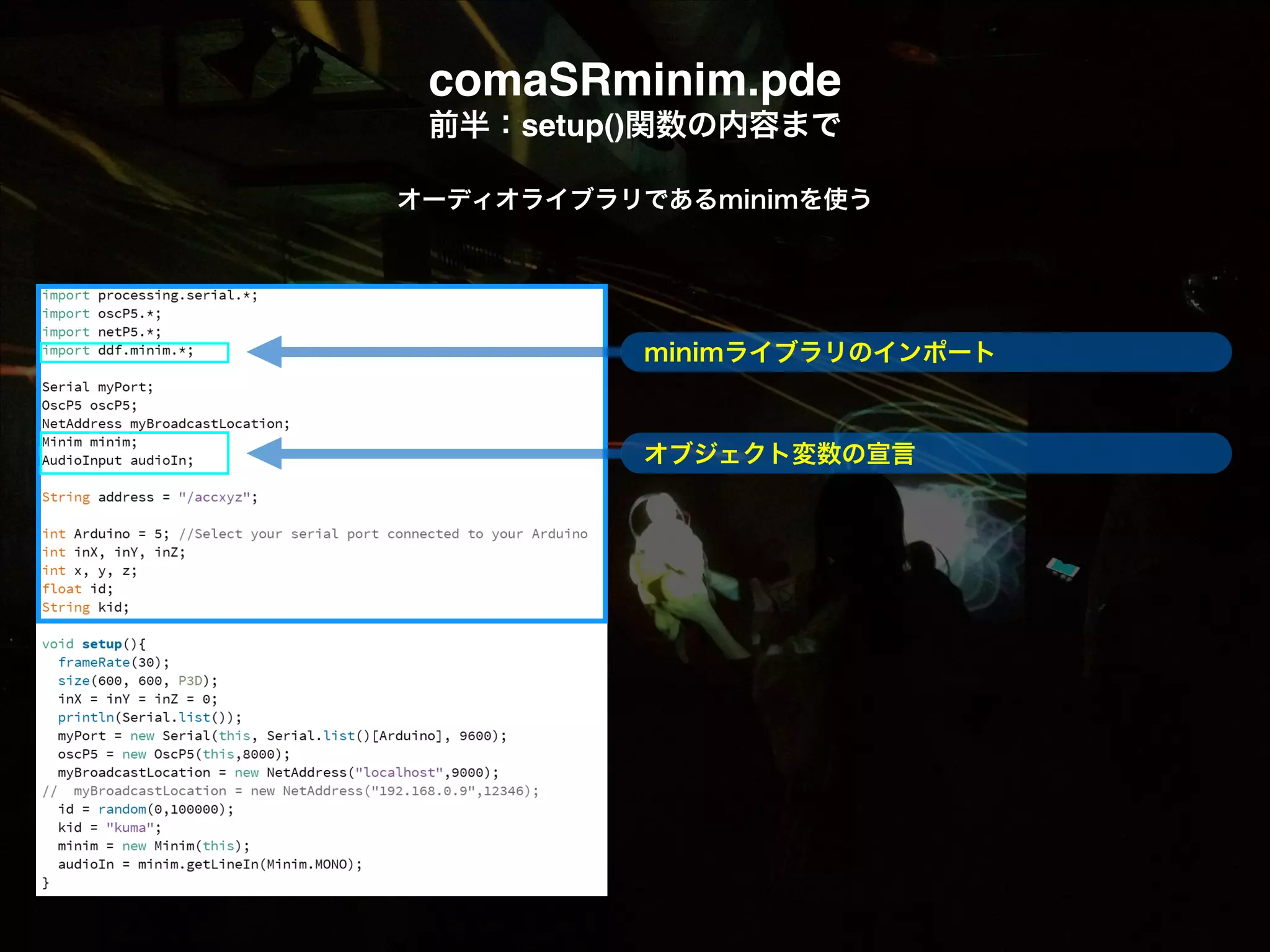
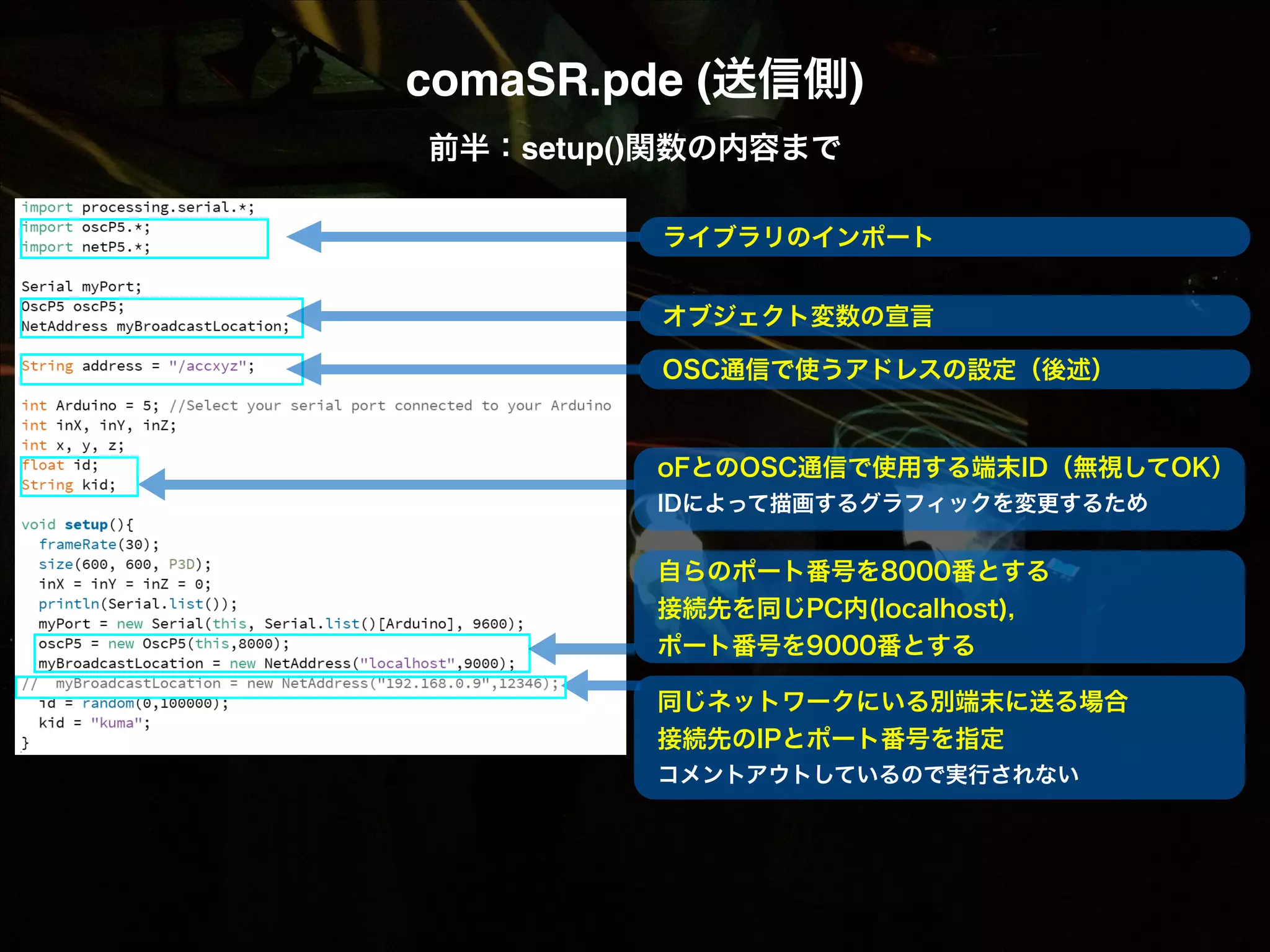
![comaSR.pde! 前半:setup()関数の内容まで setup()関数:初期設定 ! myPort = new Serial(this, シリアルポート, 9600); 任意のシリアルポートを9600bpsでオープン ・Serial.list()[Arduino]:上で設定したポート番号を使う](https://image.slidesharecdn.com/comastudyroomarduino-131125102754-phpapp01/75/coma-Study-Room-Arduino-Workshop-68-2048.jpg)