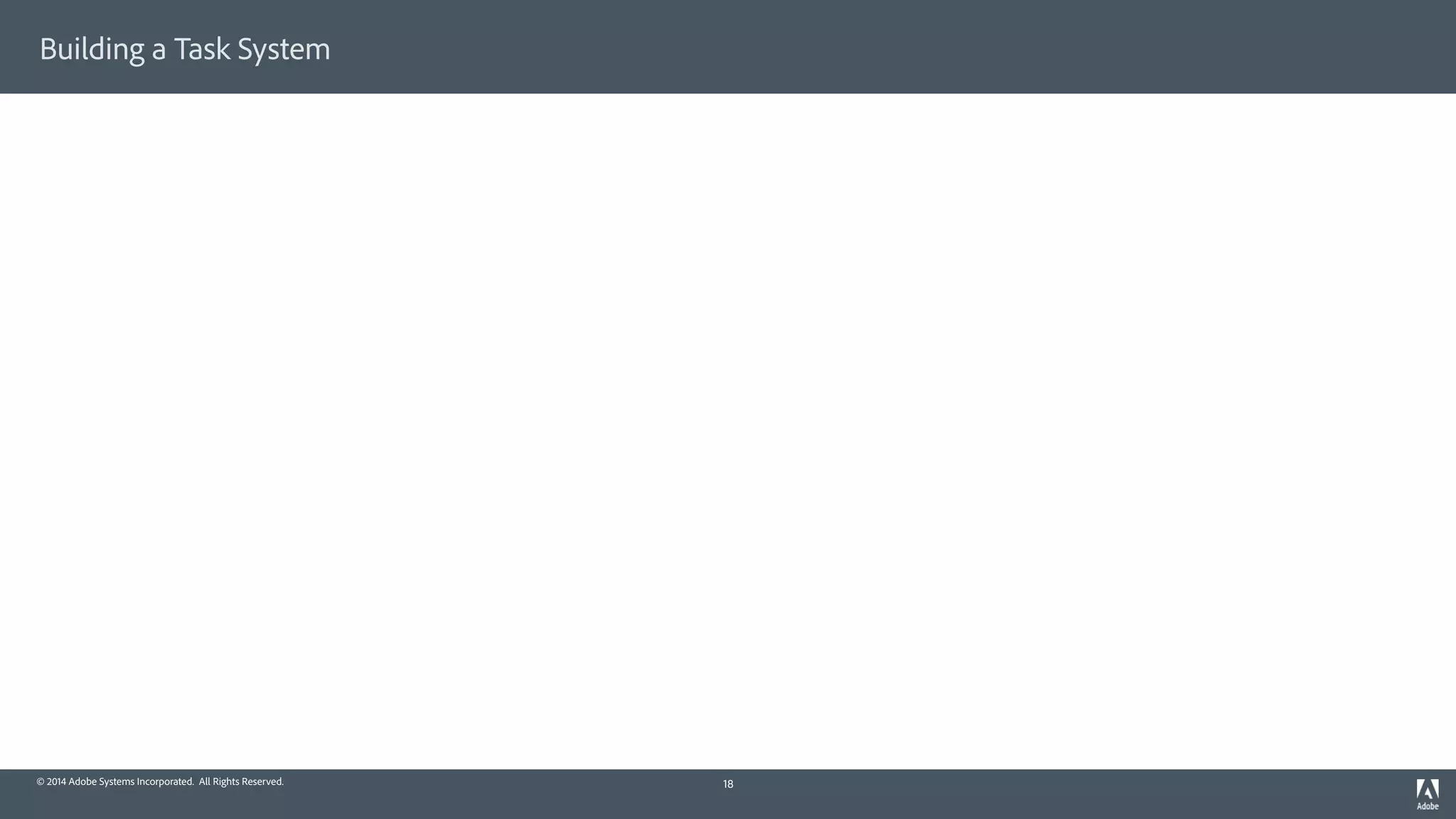
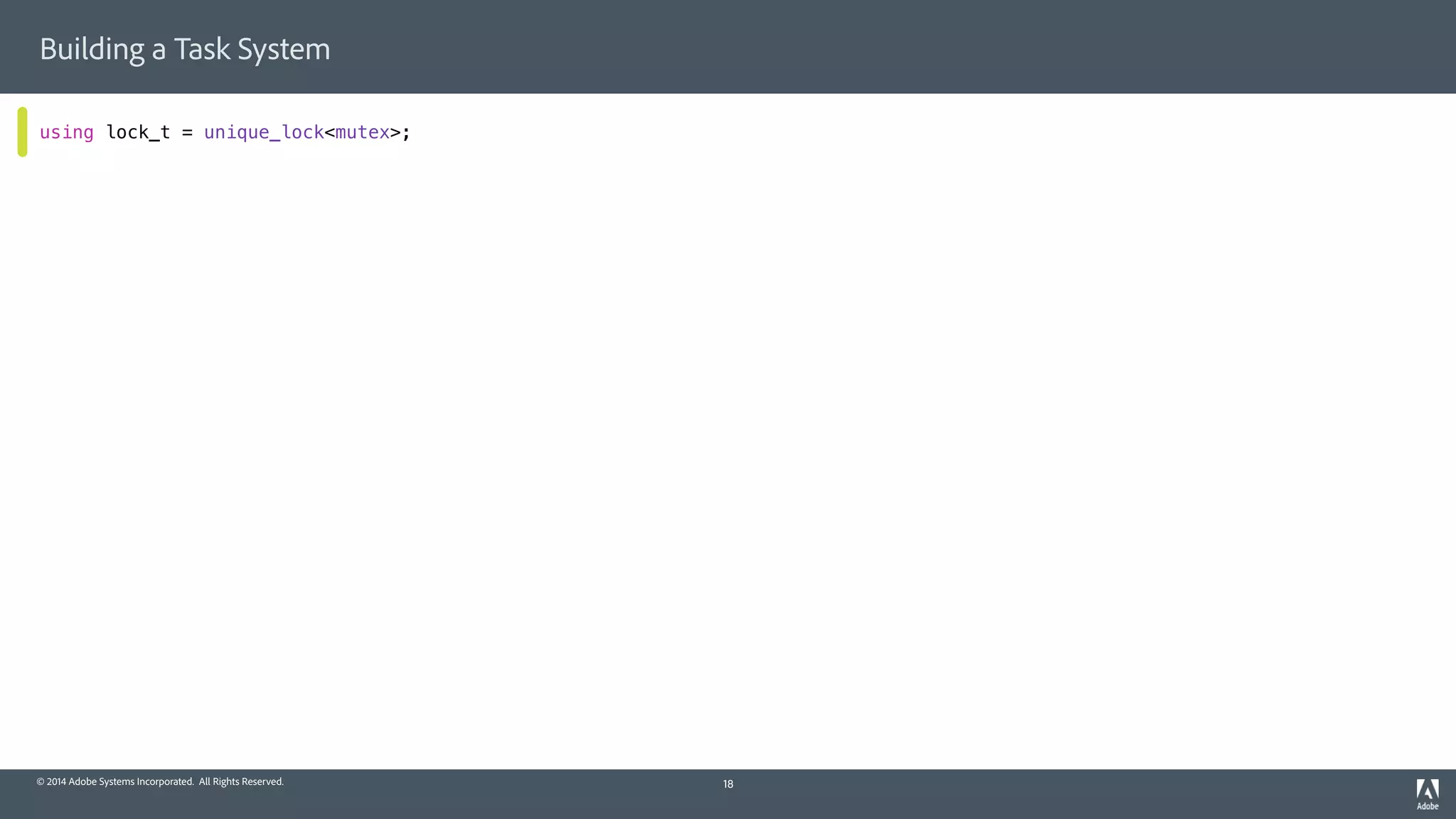
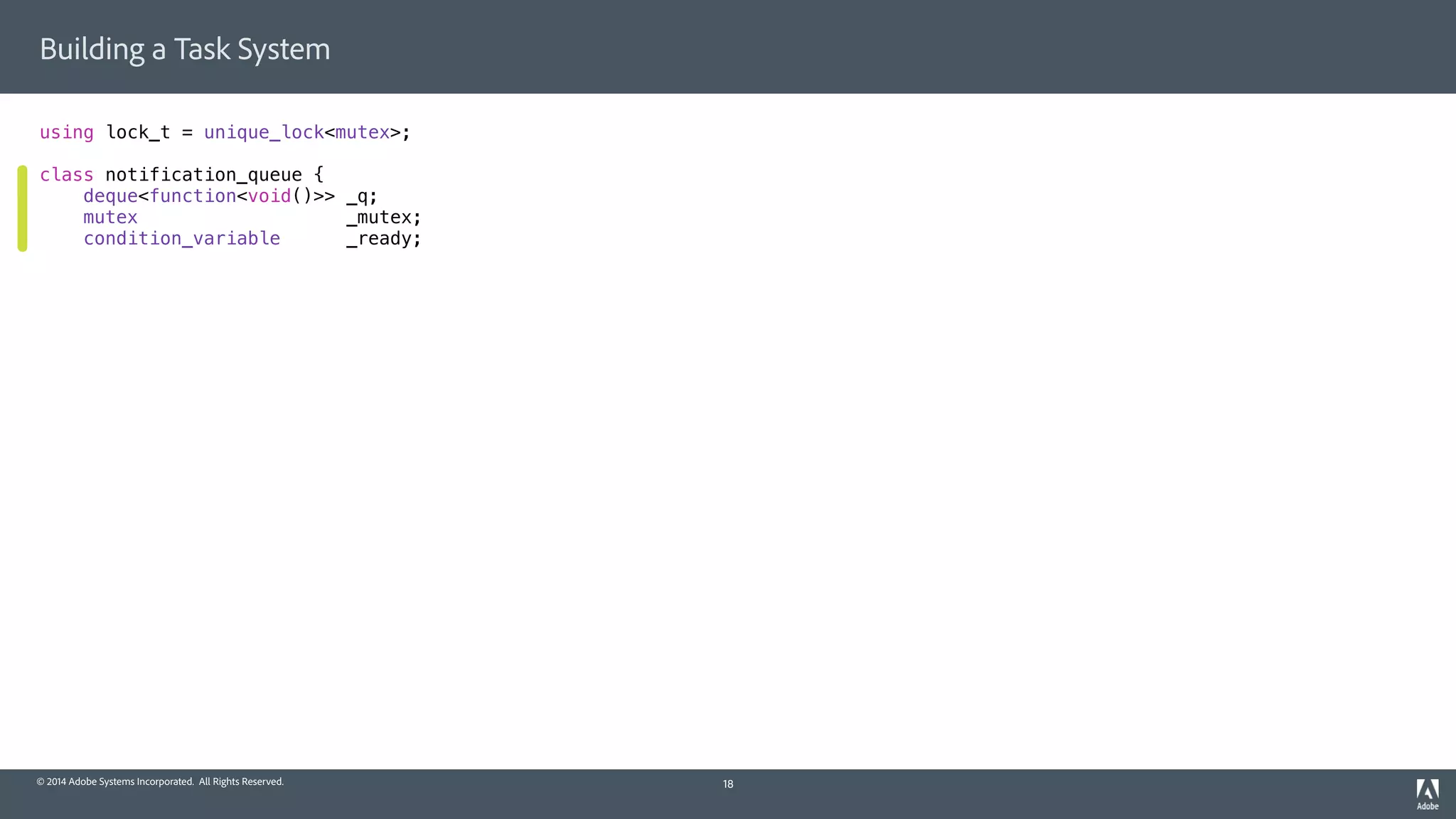
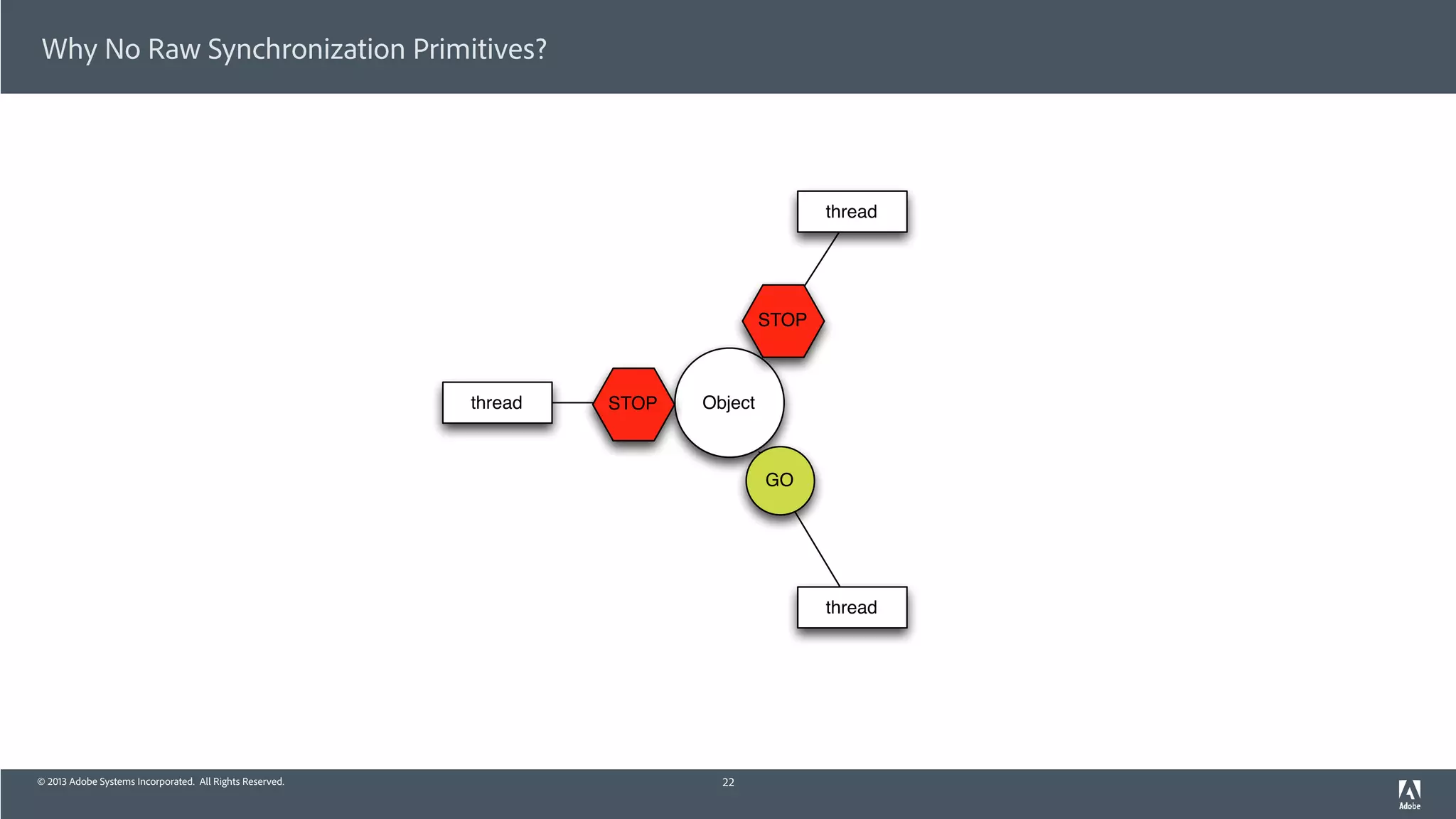
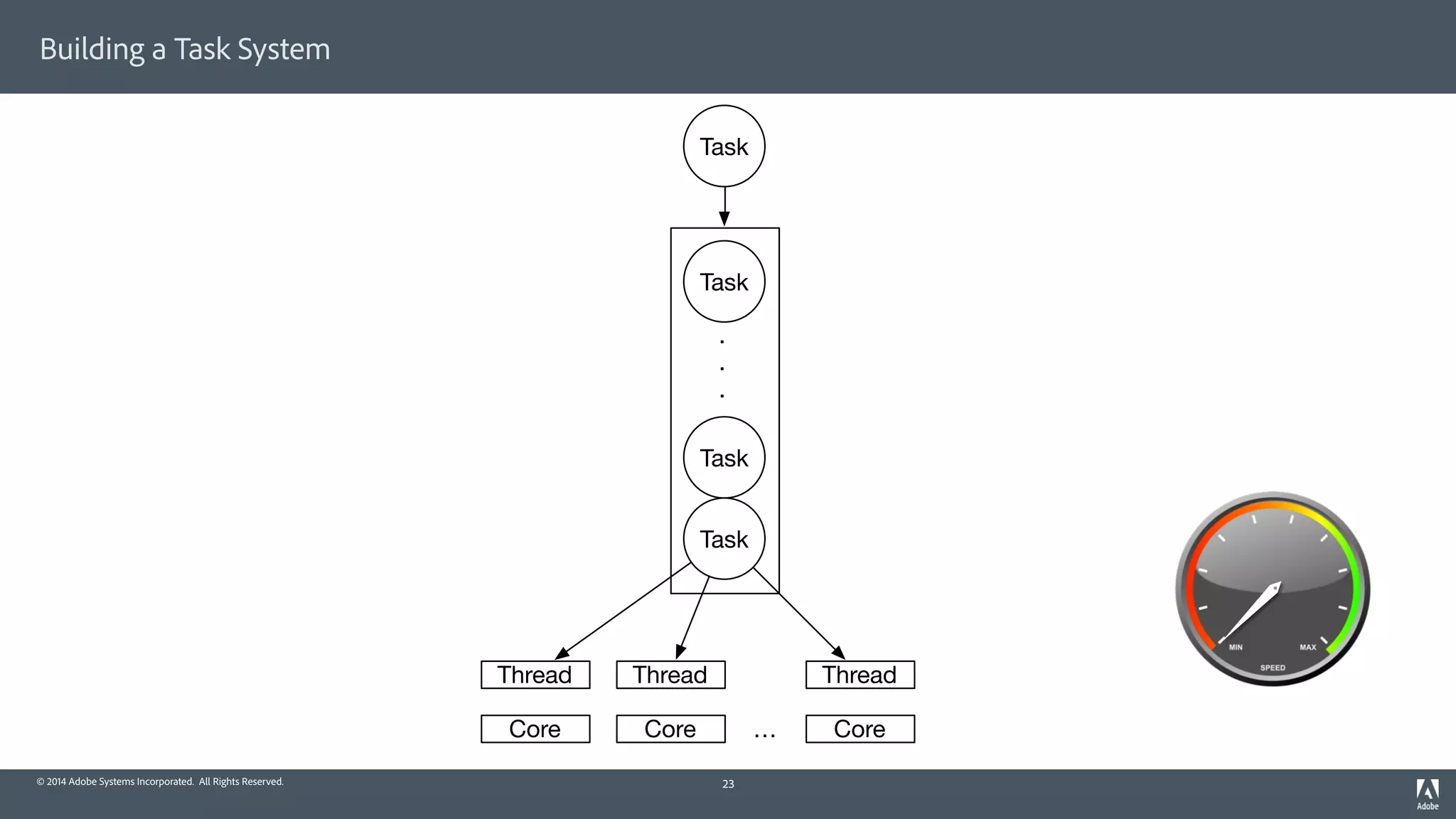
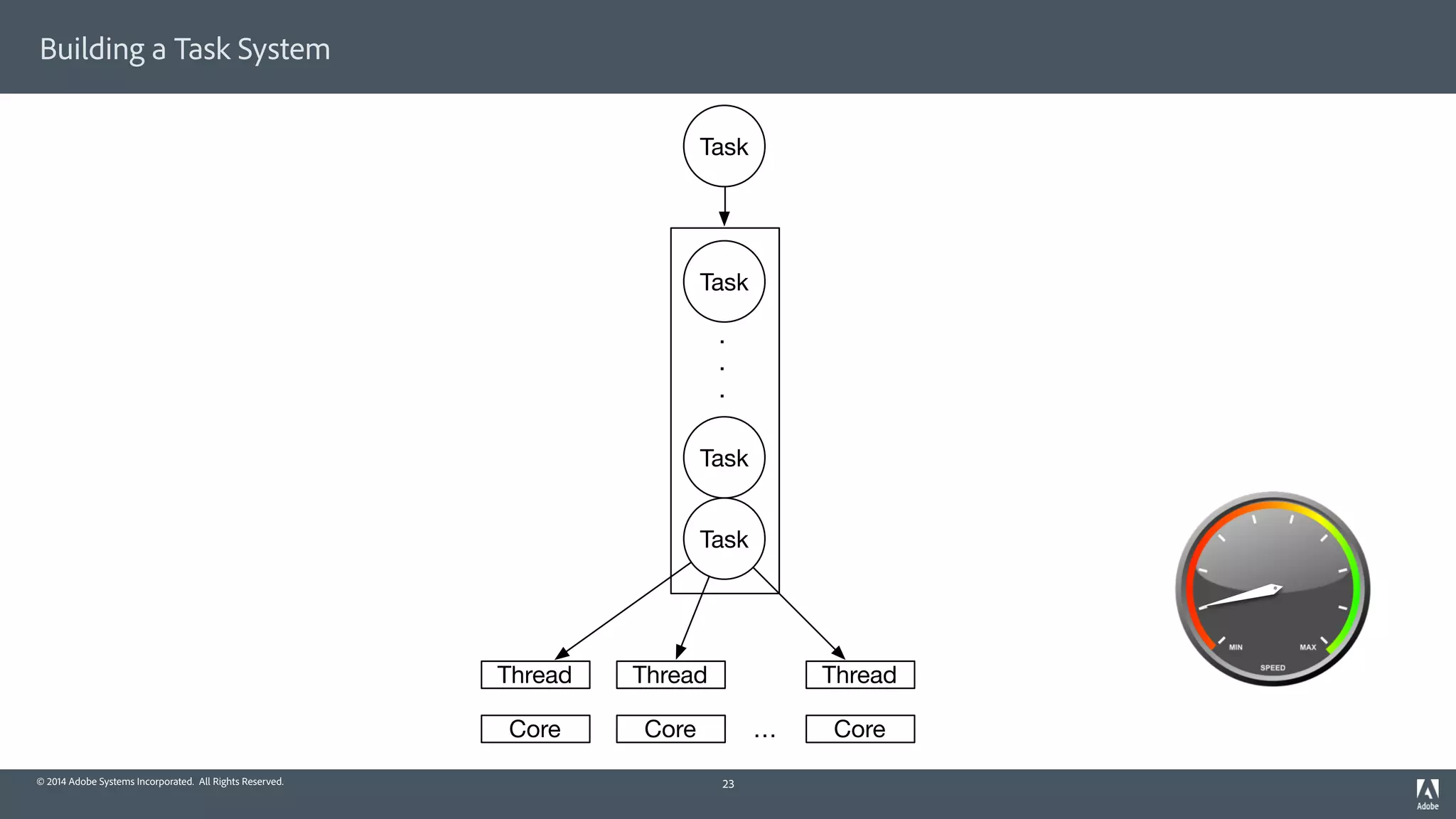
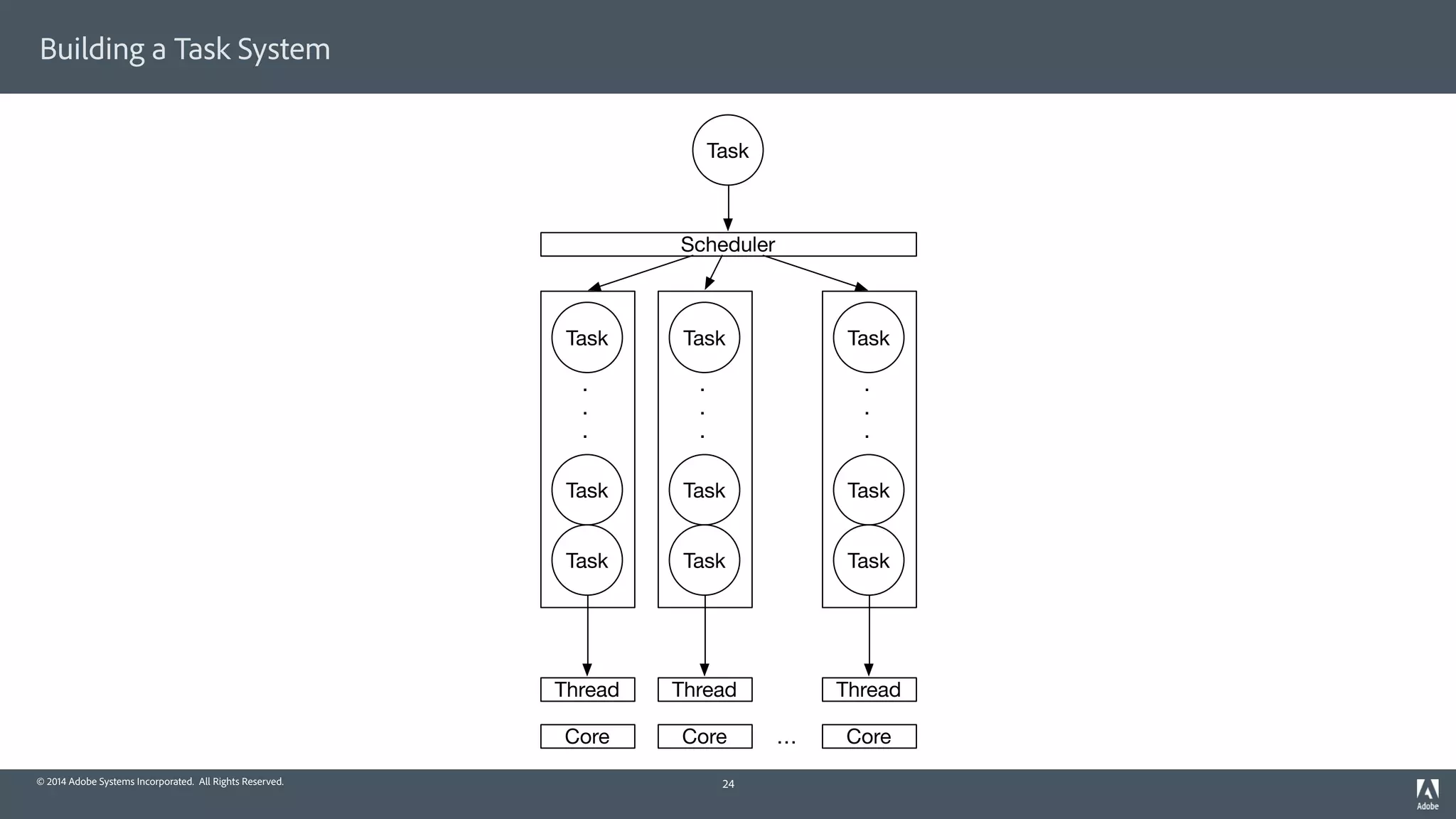
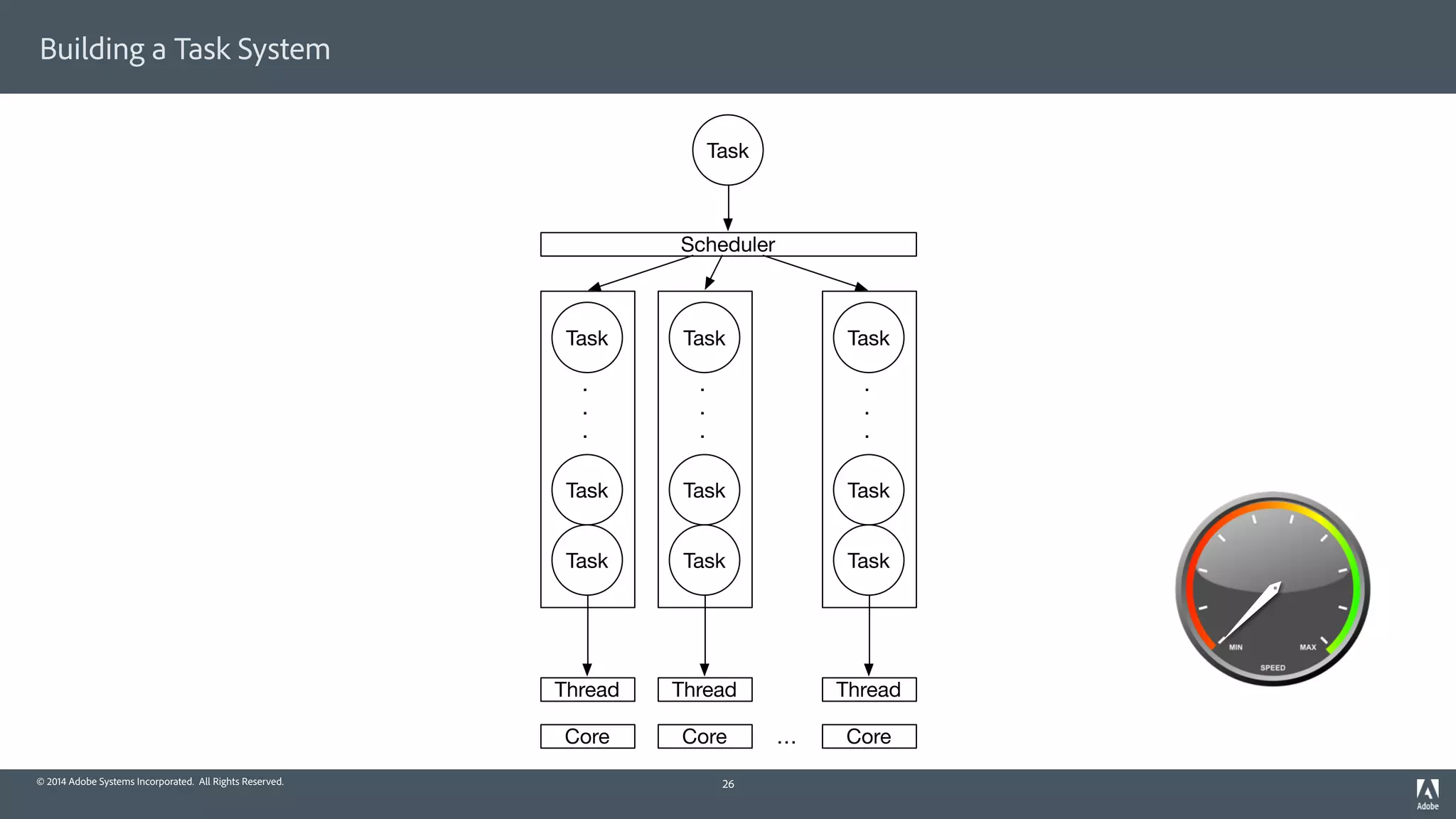
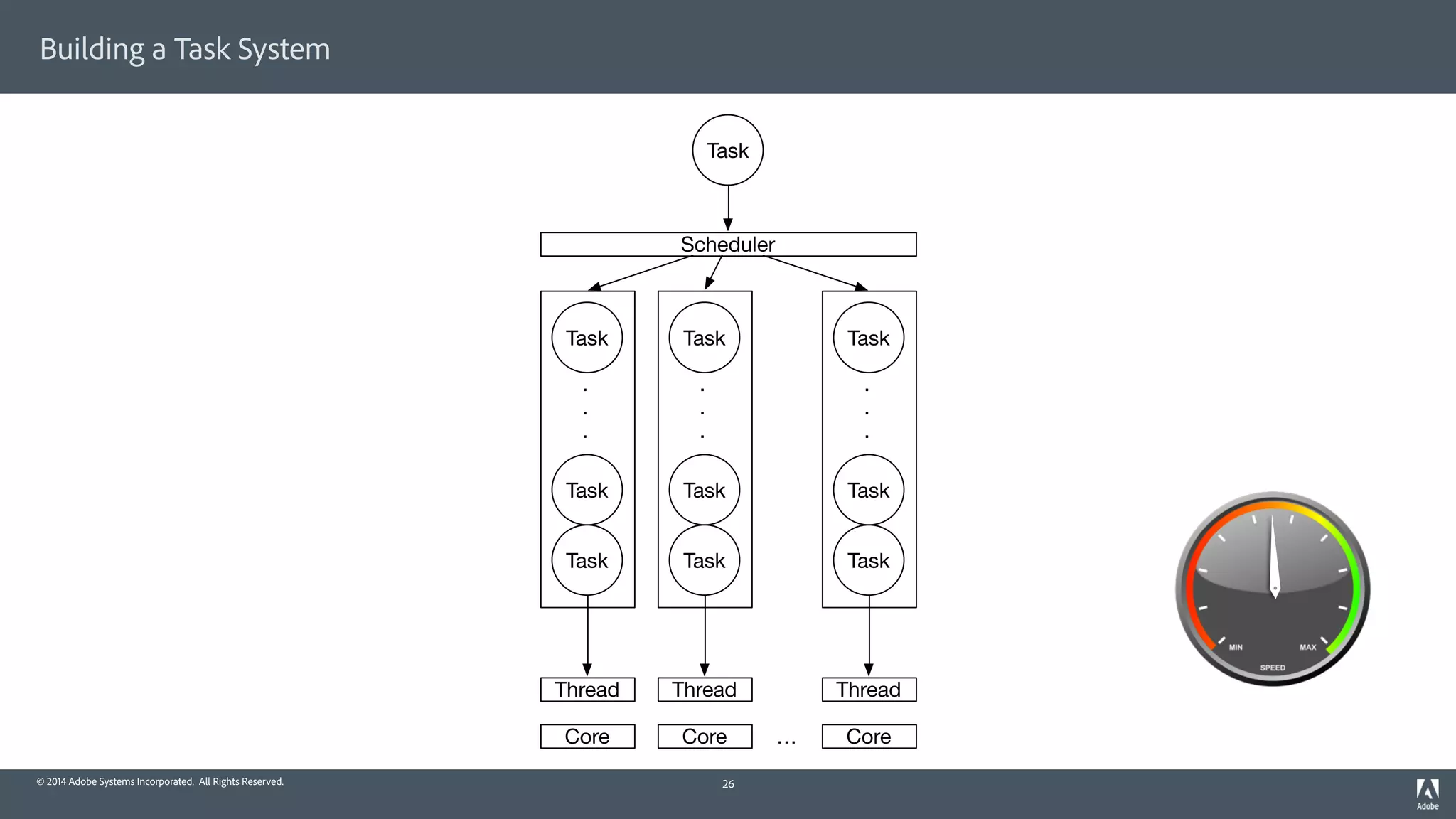
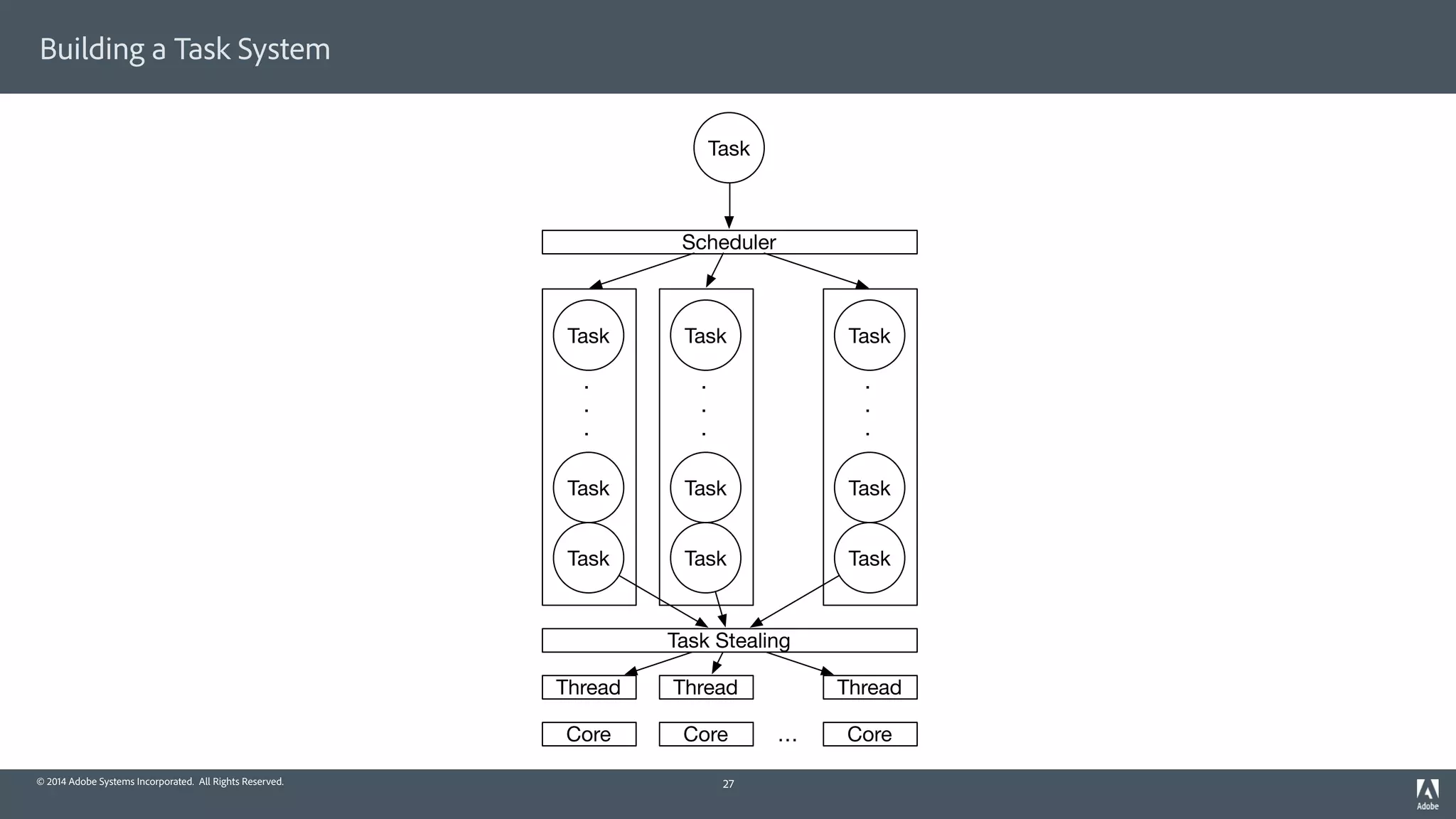
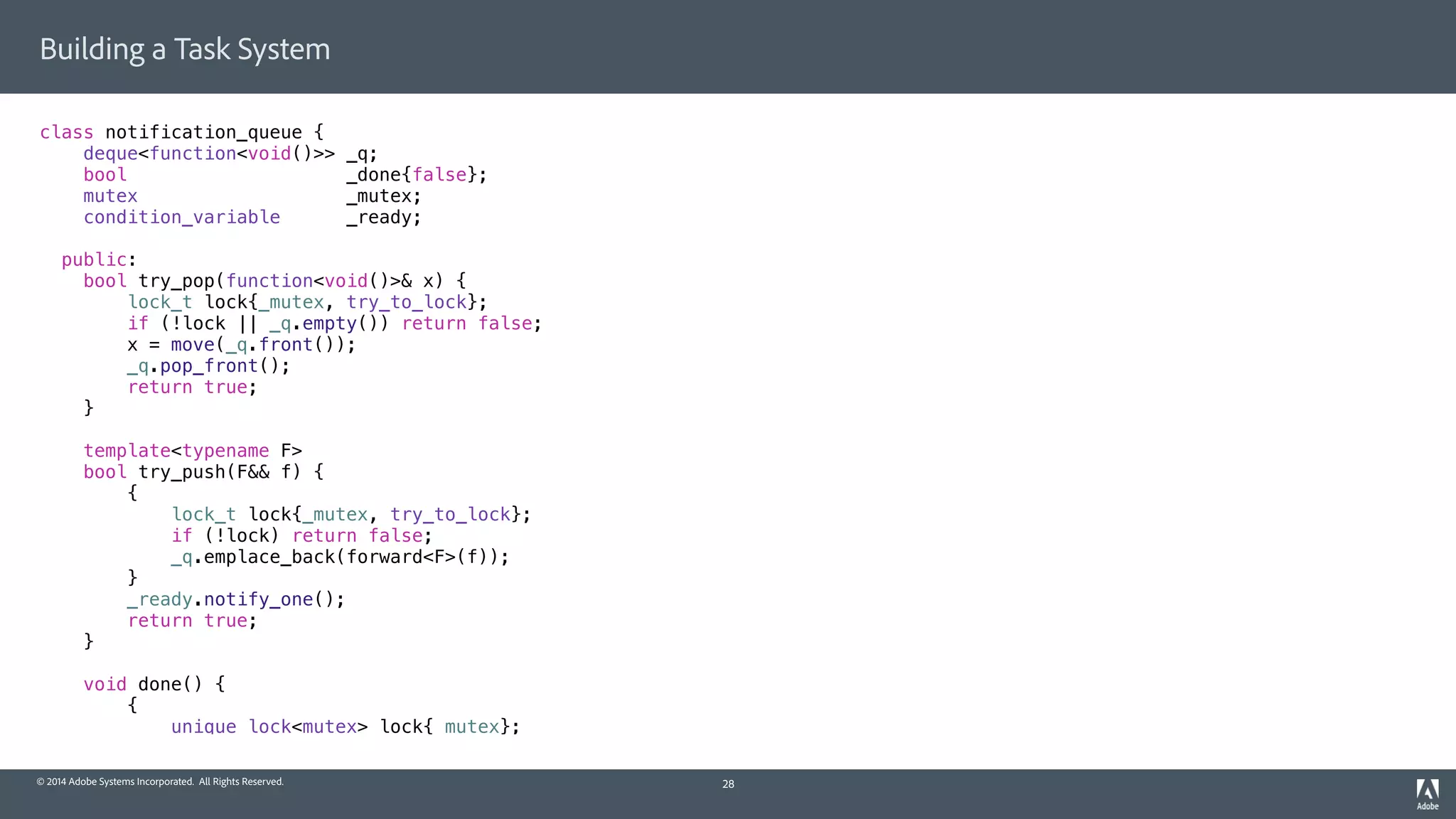
The document discusses principles for efficient coding practices in concurrency and task management, emphasizing minimal use of raw synchronization primitives and promoting task systems. It outlines the structure and implementation of a task system in C++14 that manages threads and tasks, focusing on optimizing machine utilization. Additionally, it introduces concepts of concurrency, parallelism, and the importance of avoiding performance bottlenecks in programming.





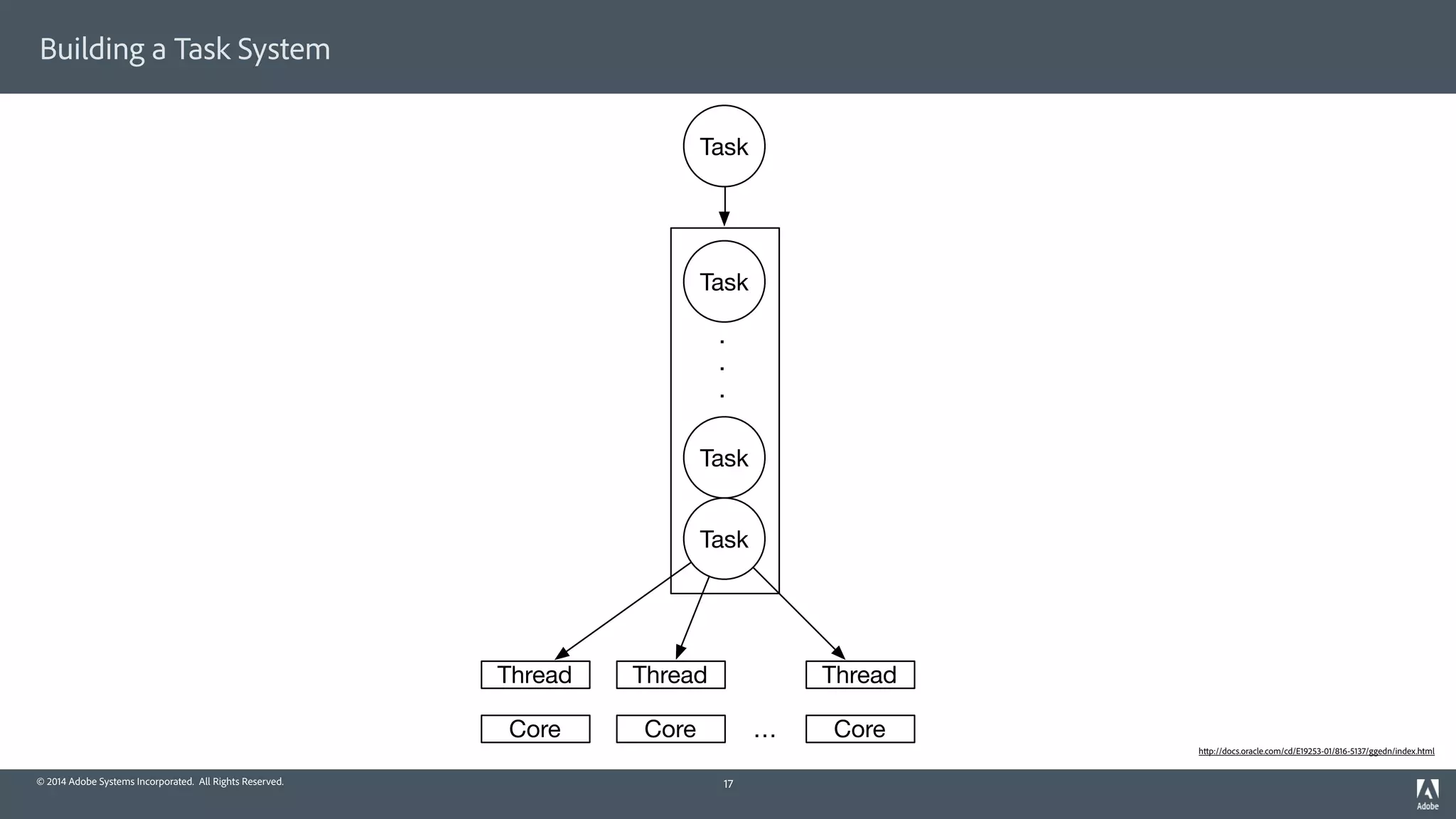
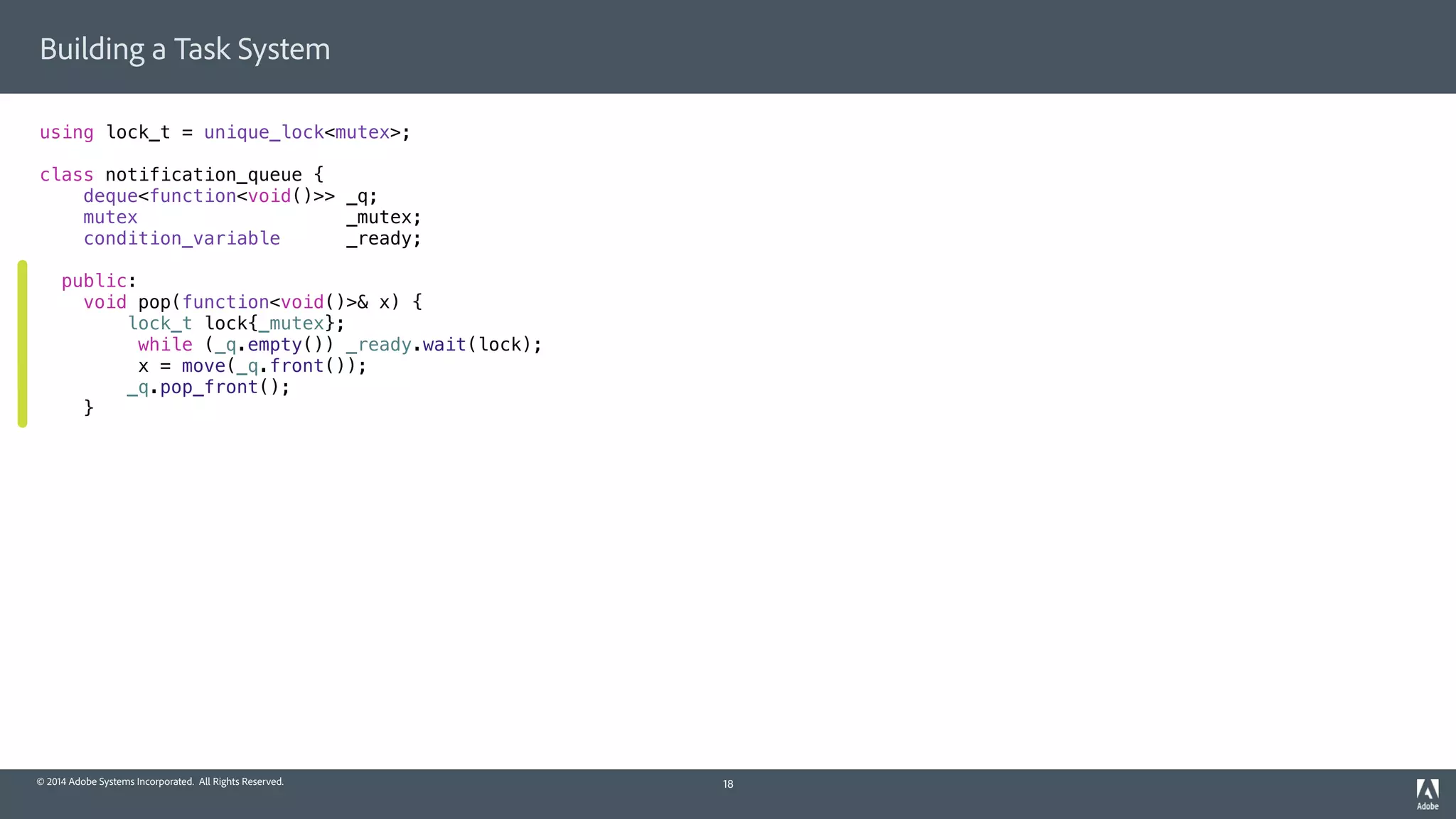



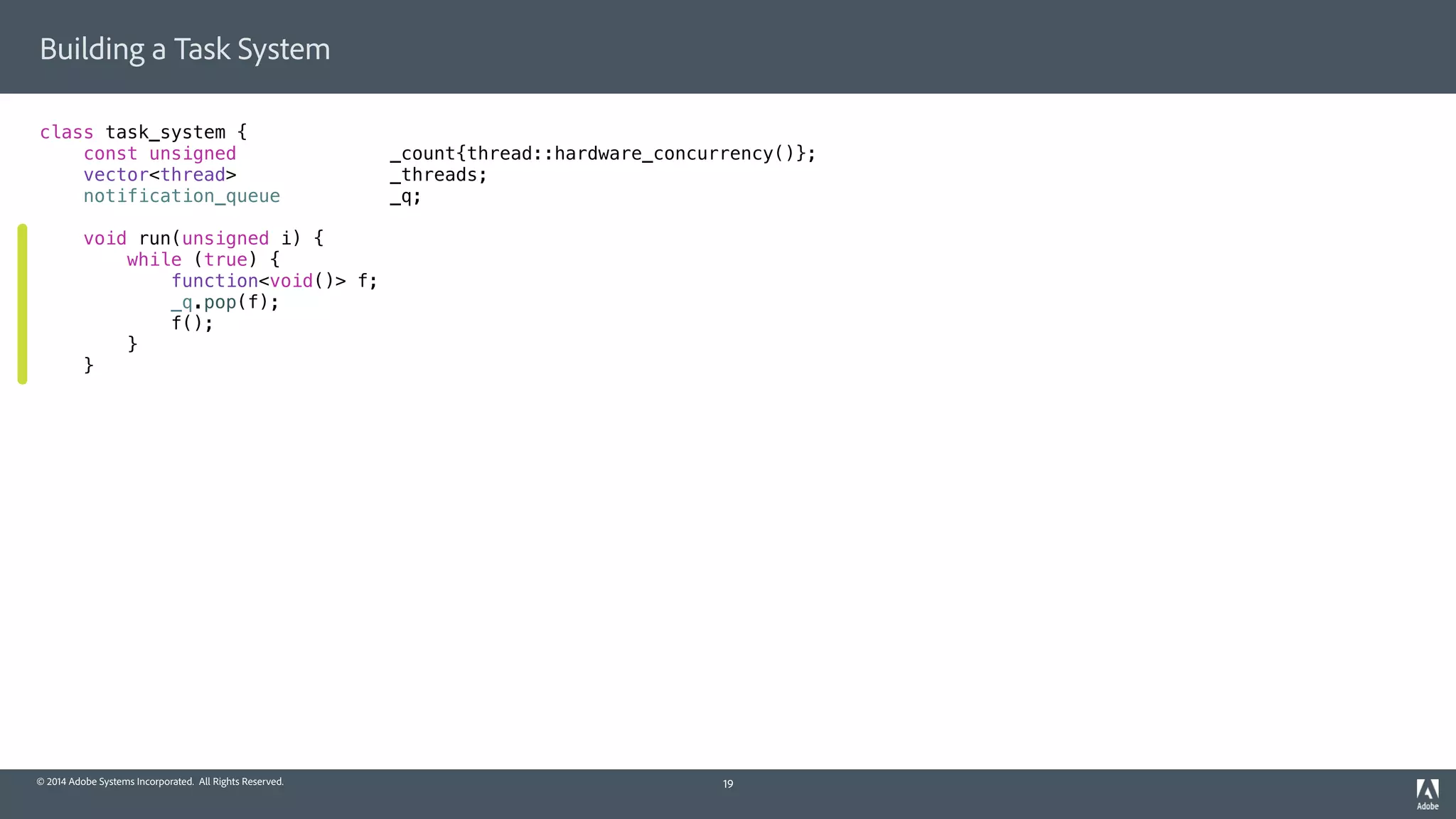
![© 2014 Adobe Systems Incorporated. All Rights Reserved. Building a Task System class task_system { const unsigned _count{thread::hardware_concurrency()}; vector<thread> _threads; notification_queue _q; void run(unsigned i) { while (true) { function<void()> f; _q.pop(f); f(); } } public: task_system() { for (unsigned n = 0; n != _count; ++n) { _threads.emplace_back([&, n]{ run(n); }); } } 19](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-35-2048.jpg)
![© 2014 Adobe Systems Incorporated. All Rights Reserved. Building a Task System class task_system { const unsigned _count{thread::hardware_concurrency()}; vector<thread> _threads; notification_queue _q; void run(unsigned i) { while (true) { function<void()> f; _q.pop(f); f(); } } public: task_system() { for (unsigned n = 0; n != _count; ++n) { _threads.emplace_back([&, n]{ run(n); }); } } ~task_system() { for (auto& e : _threads) e.join(); } 19](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-36-2048.jpg)
![© 2014 Adobe Systems Incorporated. All Rights Reserved. Building a Task System class task_system { const unsigned _count{thread::hardware_concurrency()}; vector<thread> _threads; notification_queue _q; void run(unsigned i) { while (true) { function<void()> f; _q.pop(f); f(); } } public: task_system() { for (unsigned n = 0; n != _count; ++n) { _threads.emplace_back([&, n]{ run(n); }); } } ~task_system() { for (auto& e : _threads) e.join(); } template <typename F> void async_(F&& f) { _q.push(forward<F>(f)); } }; 19](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-37-2048.jpg)

![© 2014 Adobe Systems Incorporated. All Rights Reserved. Building a Task System class task_system { const unsigned _count{thread::hardware_concurrency()}; vector<thread> _threads; vector<notification_queue> _q{_count}; atomic<unsigned> _index{0}; void run(unsigned i) { while (true) { function<void()> f; if (!_q[i].pop(f)) break; f(); } } public: task_system() { } ~task_system() { for (auto& e : _q) e.done(); for (auto& e : _threads) e.join(); } template <typename F> void async_(F&& f) { auto i = _index++; _q[i % _count].push(forward<F>(f)); } }; 25](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-50-2048.jpg)
![© 2014 Adobe Systems Incorporated. All Rights Reserved. Building a Task System class task_system { const unsigned _count{thread::hardware_concurrency()}; vector<thread> _threads; vector<notification_queue> _q{_count}; atomic<unsigned> _index{0}; void run(unsigned i) { while (true) { function<void()> f; if (!_q[i].pop(f)) break; f(); } } public: task_system() { } ~task_system() { for (auto& e : _q) e.done(); for (auto& e : _threads) e.join(); } template <typename F> void async_(F&& f) { auto i = _index++; _q[i % _count].push(forward<F>(f)); } }; 25](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-51-2048.jpg)
![© 2014 Adobe Systems Incorporated. All Rights Reserved. Building a Task System class task_system { const unsigned _count{thread::hardware_concurrency()}; vector<thread> _threads; vector<notification_queue> _q{_count}; atomic<unsigned> _index{0}; void run(unsigned i) { while (true) { function<void()> f; if (!_q[i].pop(f)) break; f(); } } public: task_system() { } ~task_system() { for (auto& e : _q) e.done(); for (auto& e : _threads) e.join(); } template <typename F> void async_(F&& f) { auto i = _index++; _q[i % _count].push(forward<F>(f)); } }; 25](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-52-2048.jpg)
![© 2014 Adobe Systems Incorporated. All Rights Reserved. Building a Task System class task_system { const unsigned _count{thread::hardware_concurrency()}; vector<thread> _threads; vector<notification_queue> _q{_count}; atomic<unsigned> _index{0}; void run(unsigned i) { while (true) { function<void()> f; if (!_q[i].pop(f)) break; f(); } } public: task_system() { } ~task_system() { for (auto& e : _q) e.done(); for (auto& e : _threads) e.join(); } template <typename F> void async_(F&& f) { auto i = _index++; _q[i % _count].push(forward<F>(f)); } }; 25](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-53-2048.jpg)
![© 2014 Adobe Systems Incorporated. All Rights Reserved. Building a Task System class task_system { const unsigned _count{thread::hardware_concurrency()}; vector<thread> _threads; vector<notification_queue> _q{_count}; atomic<unsigned> _index{0}; void run(unsigned i) { while (true) { function<void()> f; if (!_q[i].pop(f)) break; f(); } } public: task_system() { } ~task_system() { for (auto& e : _q) e.done(); for (auto& e : _threads) e.join(); } template <typename F> void async_(F&& f) { auto i = _index++; _q[i % _count].push(forward<F>(f)); } }; 25](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-54-2048.jpg)
![© 2014 Adobe Systems Incorporated. All Rights Reserved. Building a Task System void run(unsigned i) { while (true) { function<void()> f; for (unsigned n = 0; n != _count; ++n) { if (_q[(i + n) % _count].try_pop(f)) break; } if (!f && !_q[i].pop(f)) break; f(); } } public: task_system() { } ~task_system() { } template <typename F> void async_(F&& f) { auto i = _index++; for (unsigned n = 0; n != _count; ++n) { if (_q[(i + n) % _count].try_push(forward<F>(f))) return; } _q[i % _count].push(forward<F>(f)); } }; 29](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-61-2048.jpg)
![© 2014 Adobe Systems Incorporated. All Rights Reserved. Building a Task System void run(unsigned i) { while (true) { function<void()> f; for (unsigned n = 0; n != _count; ++n) { if (_q[(i + n) % _count].try_pop(f)) break; } if (!f && !_q[i].pop(f)) break; f(); } } public: task_system() { } ~task_system() { } template <typename F> void async_(F&& f) { auto i = _index++; for (unsigned n = 0; n != _count; ++n) { if (_q[(i + n) % _count].try_push(forward<F>(f))) return; } _q[i % _count].push(forward<F>(f)); } }; 29](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-62-2048.jpg)
![© 2014 Adobe Systems Incorporated. All Rights Reserved. Building a Task System void run(unsigned i) { while (true) { function<void()> f; for (unsigned n = 0; n != _count; ++n) { if (_q[(i + n) % _count].try_pop(f)) break; } if (!f && !_q[i].pop(f)) break; f(); } } public: task_system() { } ~task_system() { } template <typename F> void async_(F&& f) { auto i = _index++; for (unsigned n = 0; n != _count; ++n) { if (_q[(i + n) % _count].try_push(forward<F>(f))) return; } _q[i % _count].push(forward<F>(f)); } }; 29](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-63-2048.jpg)

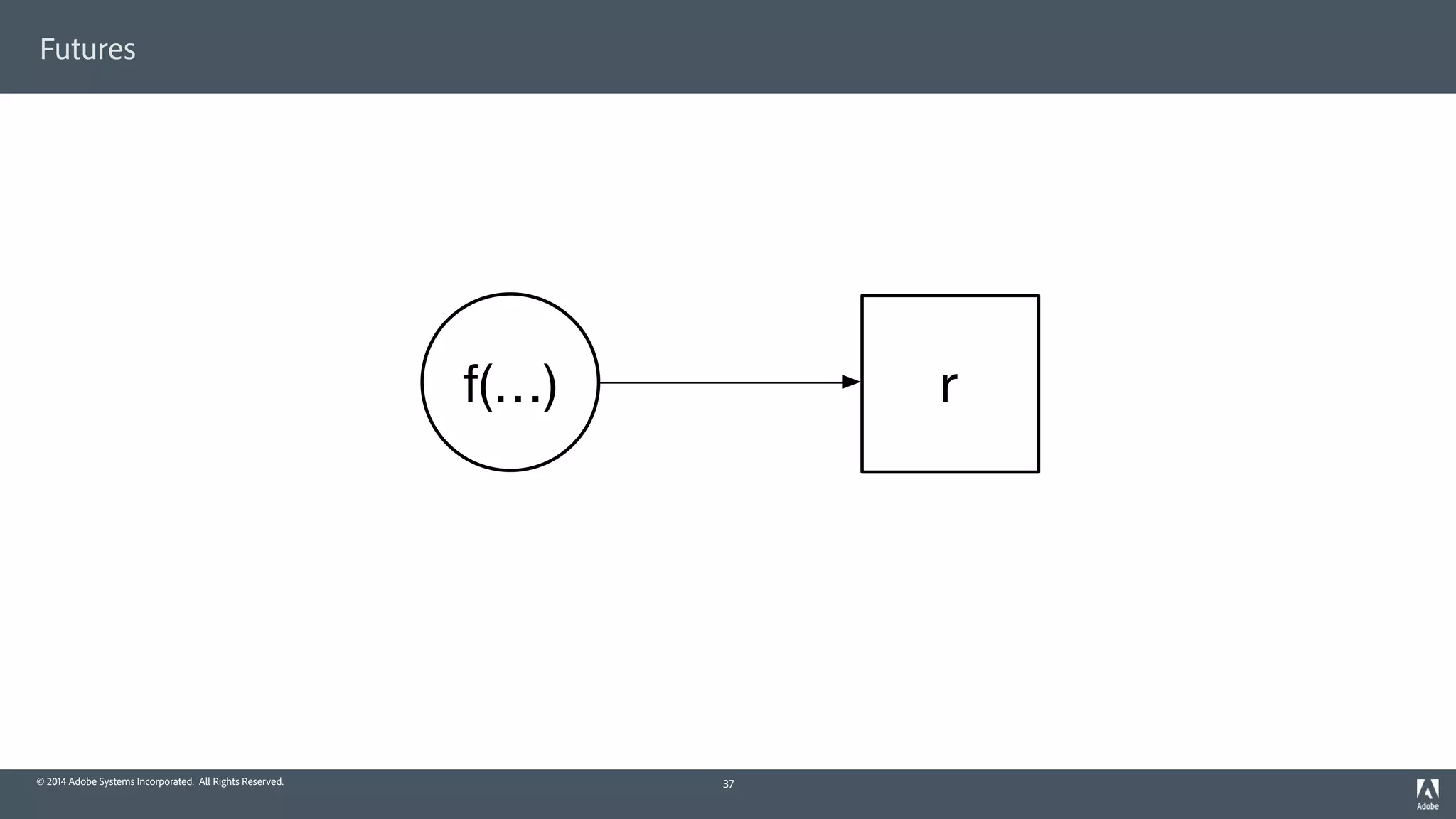
![© 2014 Adobe Systems Incorporated. All Rights Reserved. Futures 32 future<cpp_int> x = async([]{ return fibonacci<cpp_int>(1'000'000); }); // Do Something cout << x.get() << endl;](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-67-2048.jpg)
![© 2014 Adobe Systems Incorporated. All Rights Reserved. Futures ! Fibonacci is often used as an example for parallel algorithms ! Please stop… 32 future<cpp_int> x = async([]{ return fibonacci<cpp_int>(1'000'000); }); // Do Something cout << x.get() << endl;](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-68-2048.jpg)
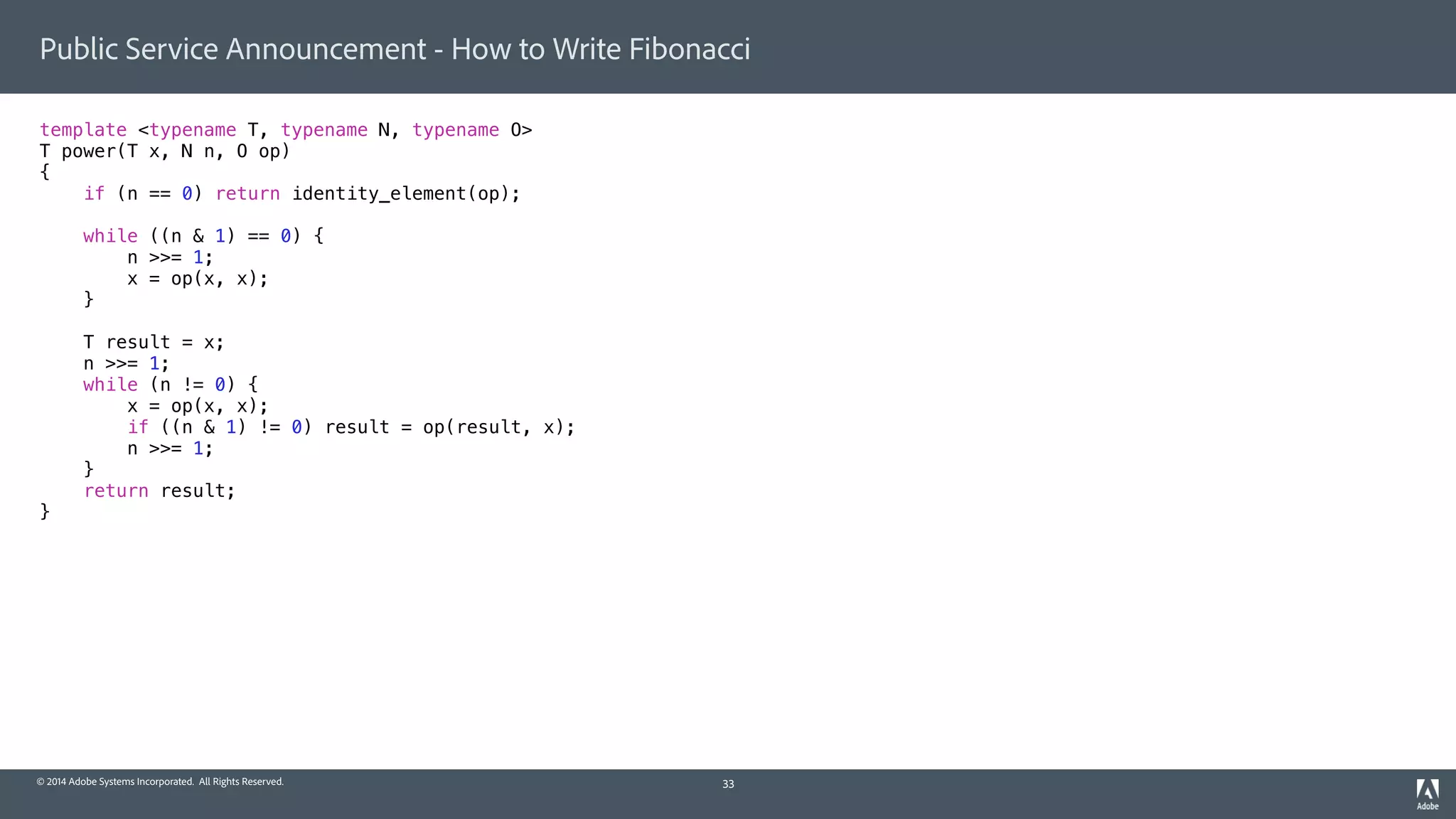
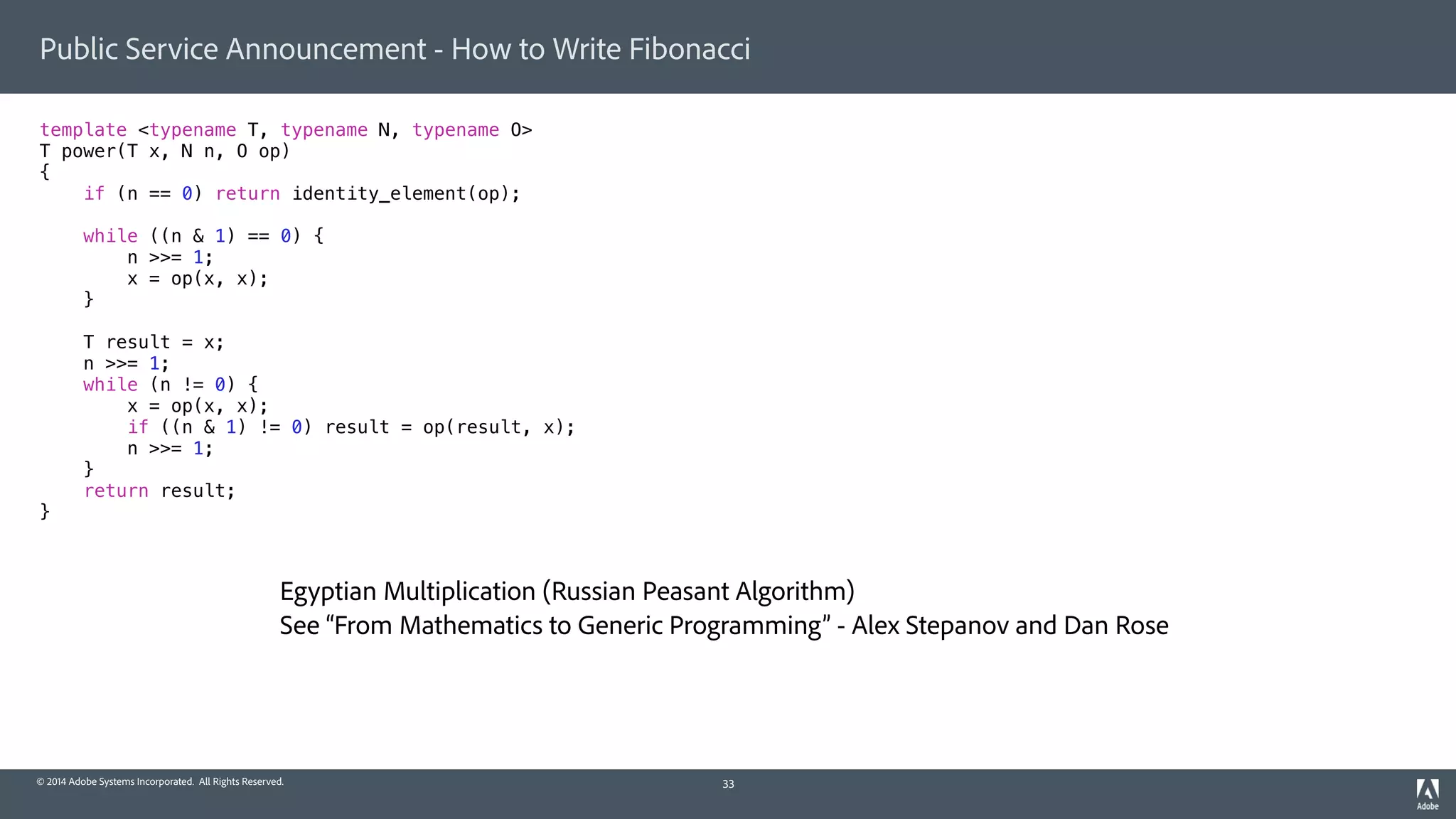
![© 2014 Adobe Systems Incorporated. All Rights Reserved. Public Service Announcement - How to Write Fibonacci template <typename N> struct multiply_2x2 { array<N, 4> operator()(const array<N, 4>& x, const array<N, 4>& y) { return { x[0] * y[0] + x[1] * y[2], x[0] * y[1] + x[1] * y[3], x[2] * y[0] + x[3] * y[2], x[2] * y[1] + x[3] * y[3] }; } }; template <typename N> array<N, 4> identity_element(const multiply_2x2<N>&) { return { N(1), N(0), N(0), N(1) }; } template <typename R, typename N> R fibonacci(N n) { if (n == 0) return R(0); return power(array<R, 4>{ 1, 1, 1, 0 }, N(n - 1), multiply_2x2<R>())[0]; } 34](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-71-2048.jpg)

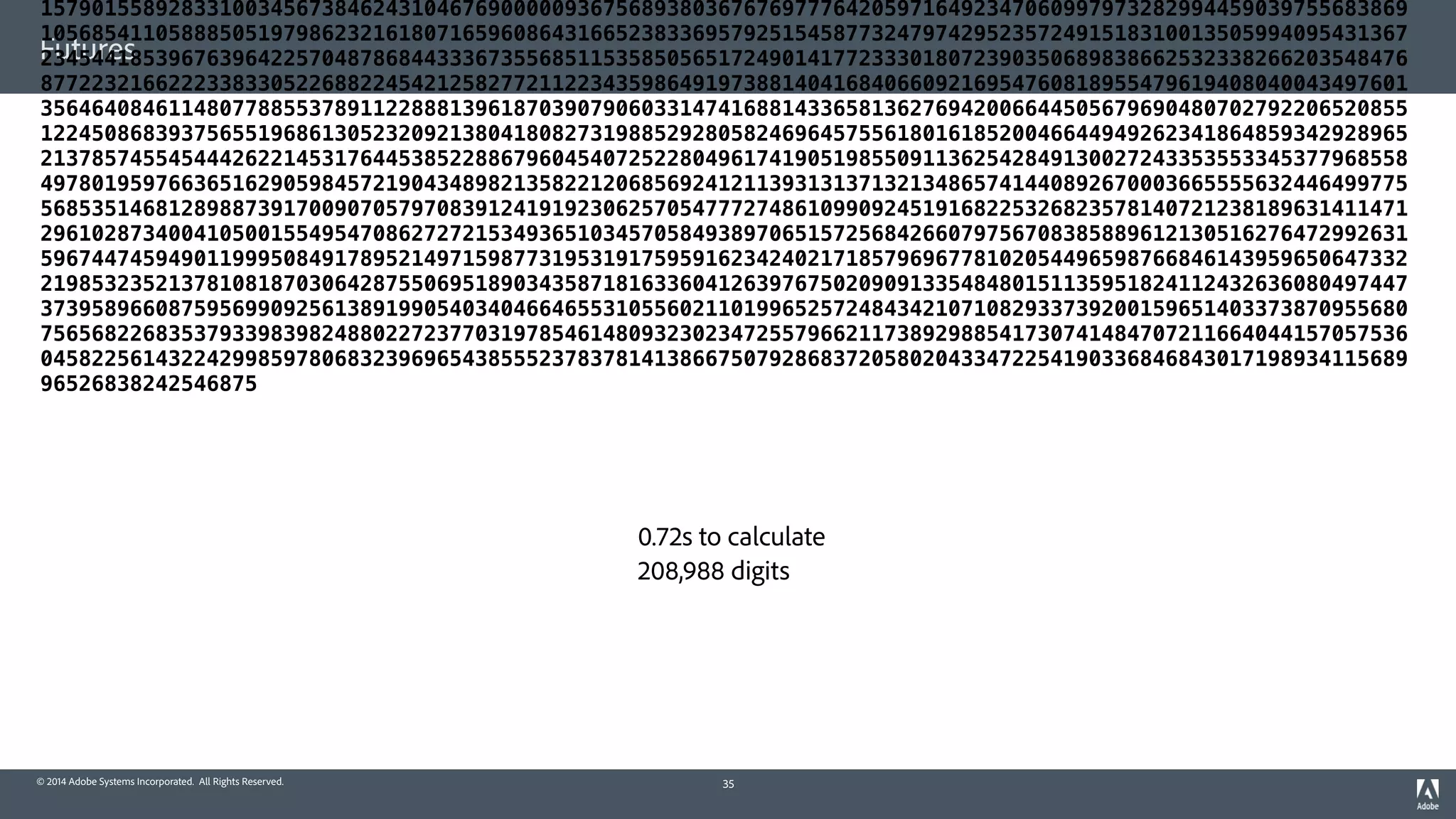
![© 2014 Adobe Systems Incorporated. All Rights Reserved. Futures 36 future<cpp_int> x = async([]{ return fibonacci<cpp_int>(1'000'000); }); // Do Something cout << x.get() << endl;](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-74-2048.jpg)

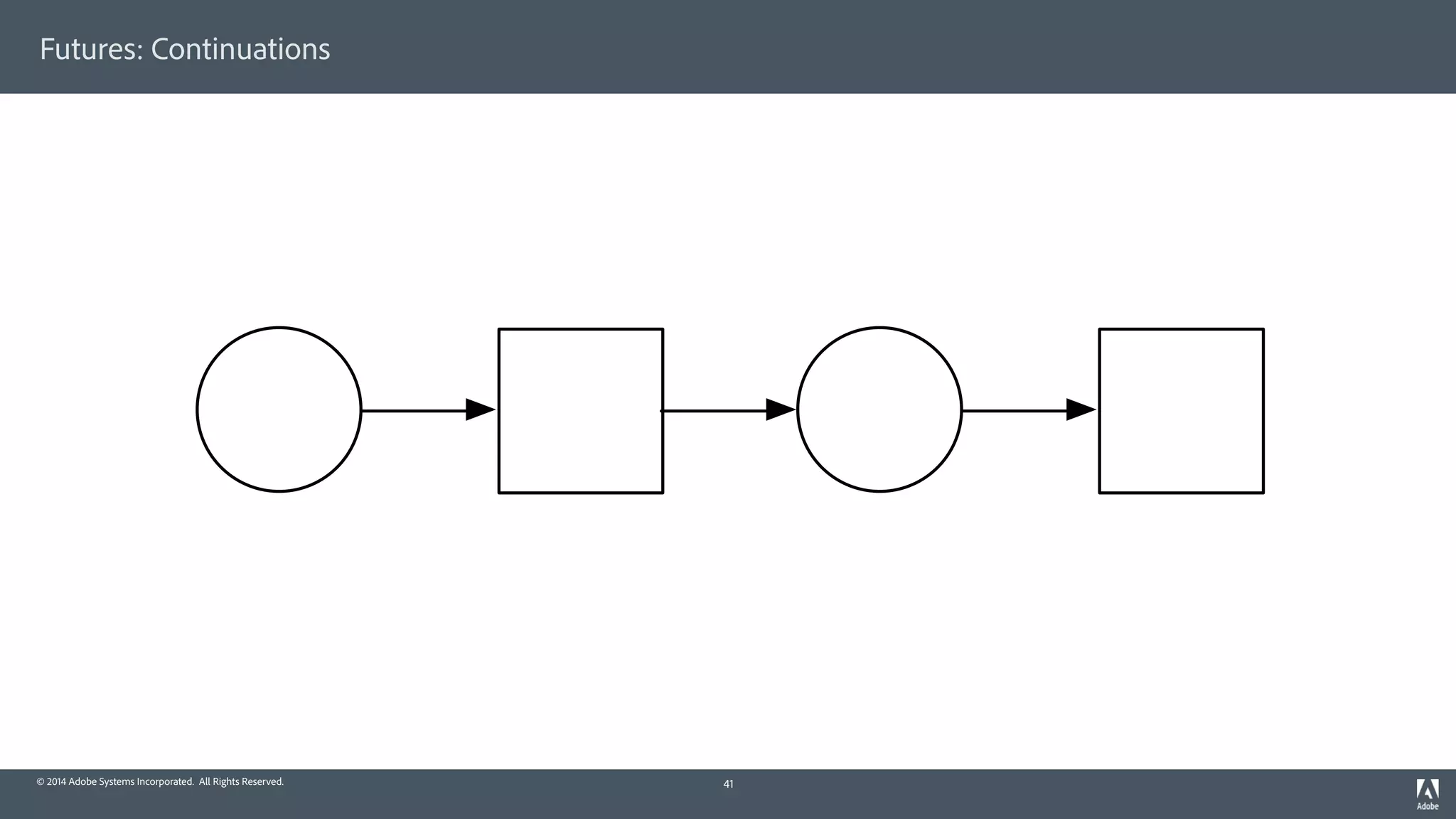
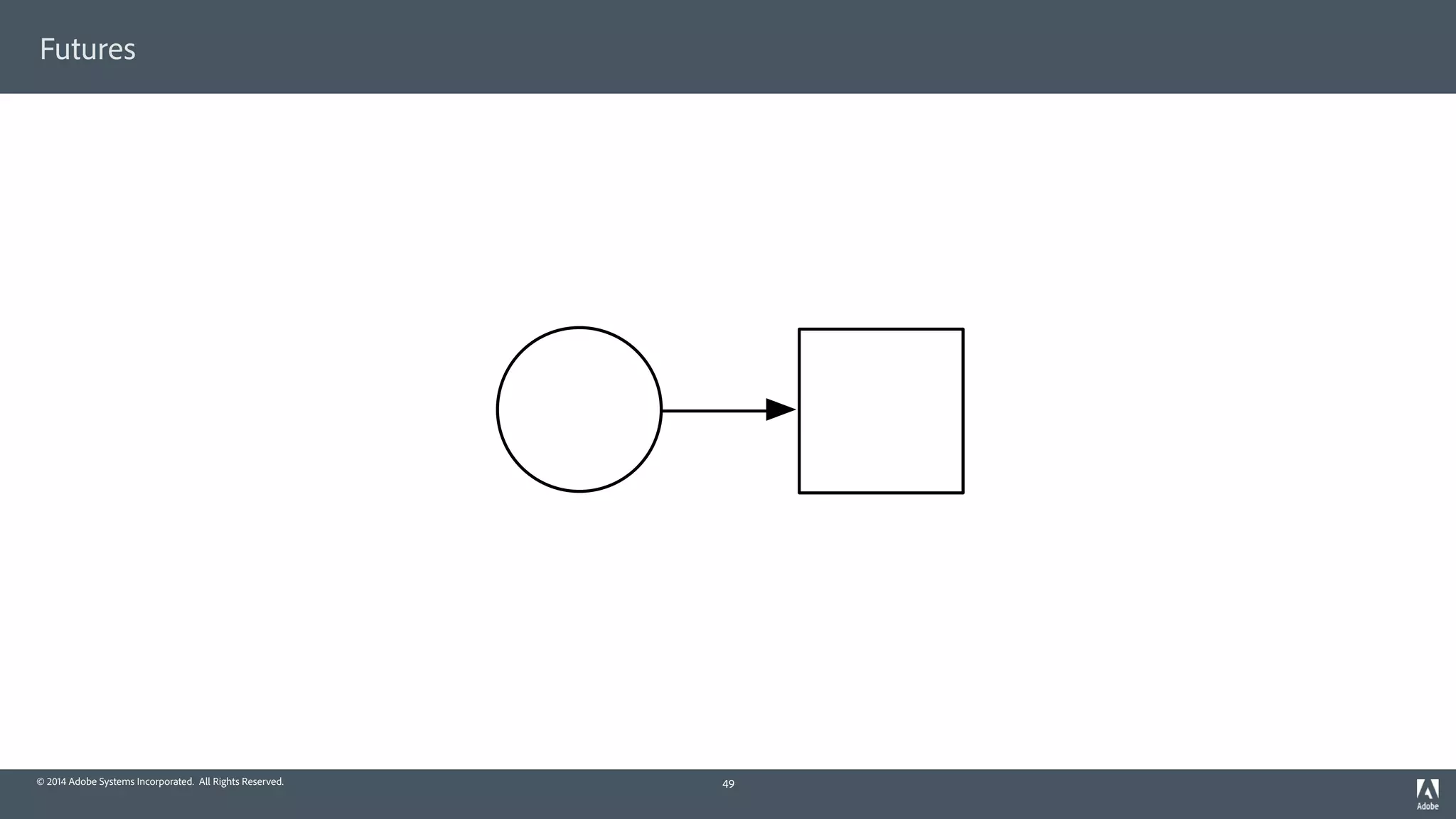
![© 2013 Adobe Systems Incorporated. All Rights Reserved. Futures: Continuations future<cpp_int> x = async([]{ return fibonacci<cpp_int>(1'000'000); }); future<void> y = x.then([](future<cpp_int> x){ cout << x.get() << endl; }); // Do something y.wait(); 43](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-82-2048.jpg)
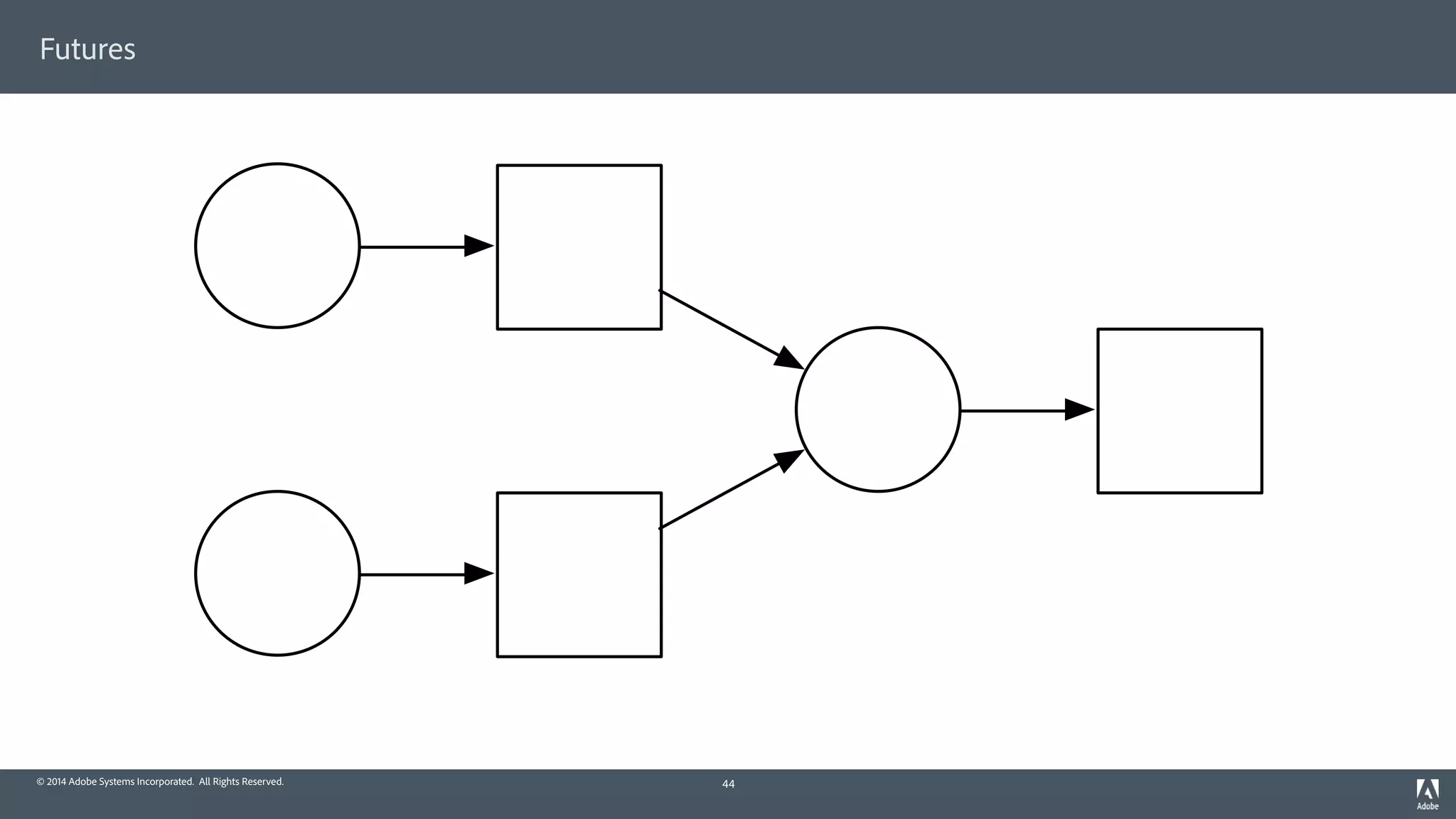
![© 2013 Adobe Systems Incorporated. All Rights Reserved. Futures: Continuations auto x = async([]{ return fibonacci<cpp_int>(1'000'000); }); auto y = async([]{ return fibonacci<cpp_int>(2'000'000); }); auto z = when_all(std::move(x), std::move(y)).then([](auto f){ auto t = f.get(); return cpp_int(get<0>(t).get() * get<1>(t).get()); }); cout << z.get() << endl; 45](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-84-2048.jpg)
![© 2013 Adobe Systems Incorporated. All Rights Reserved. Futures: Continuations auto x = async([]{ return fibonacci<cpp_int>(1'000'000); }); auto y = async([]{ return fibonacci<cpp_int>(2'000'000); }); auto z = when_all(std::move(x), std::move(y)).then([](auto f){ auto t = f.get(); return cpp_int(get<0>(t).get() * get<1>(t).get()); }); cout << z.get() << endl; 45 f is a future tuple of futures](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-85-2048.jpg)
![© 2013 Adobe Systems Incorporated. All Rights Reserved. Futures: Continuations auto x = async([]{ return fibonacci<cpp_int>(1'000'000); }); auto y = async([]{ return fibonacci<cpp_int>(2'000'000); }); auto z = when_all(std::move(x), std::move(y)).then([](auto f){ auto t = f.get(); return cpp_int(get<0>(t).get() * get<1>(t).get()); }); cout << z.get() << endl; 45 f is a future tuple of futures result is 626,964 digits](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-86-2048.jpg)
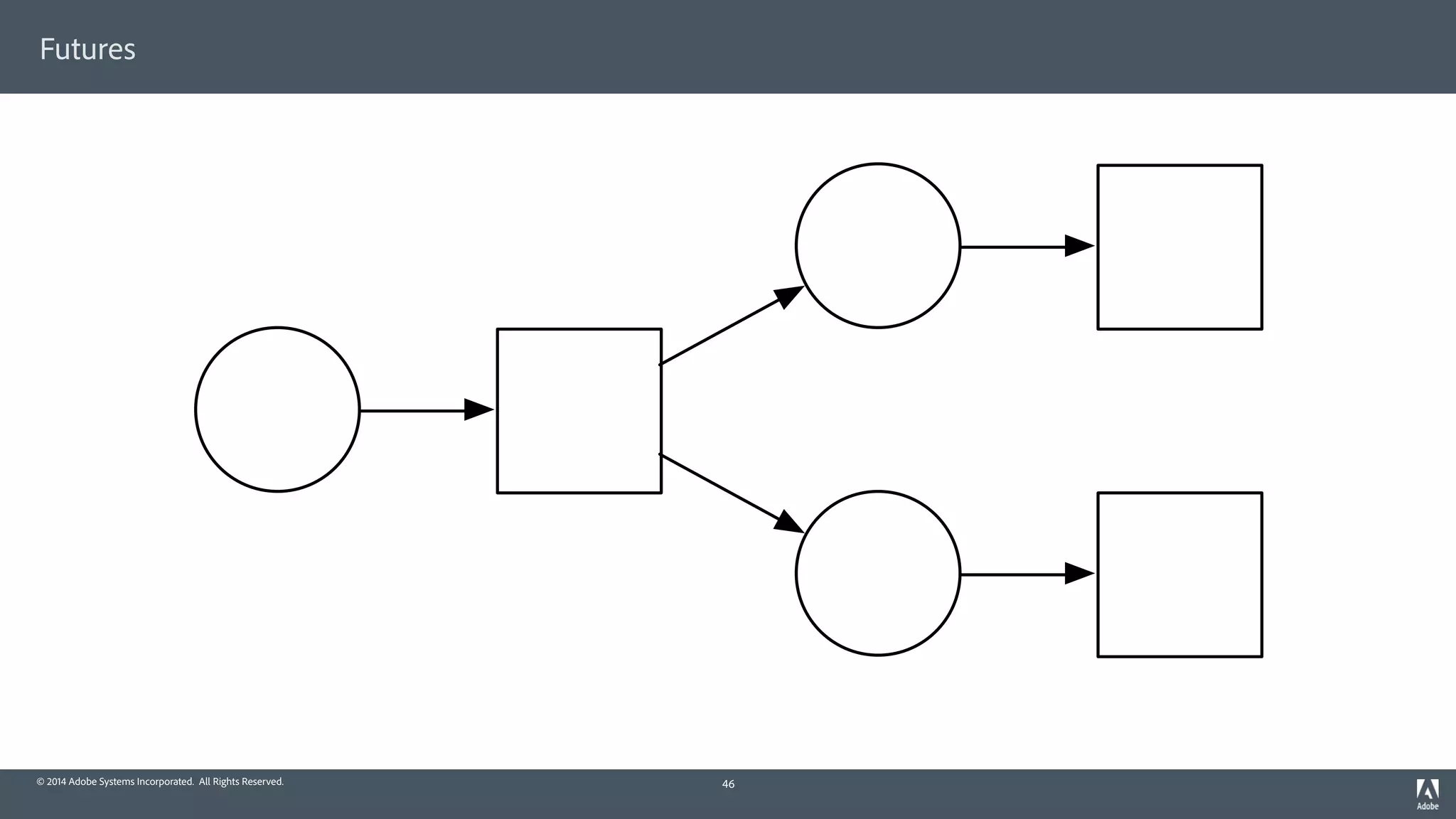
![© 2013 Adobe Systems Incorporated. All Rights Reserved. Futures: Continuations future<cpp_int> x = async([]{ return fibonacci<cpp_int>(100); }); future<cpp_int> y = x.then([](future<cpp_int> x){ return cpp_int(x.get() * 2); }); future<cpp_int> z = x.then([](future<cpp_int> x){ return cpp_int(x.get() / 15); }); 47](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-88-2048.jpg)
![© 2013 Adobe Systems Incorporated. All Rights Reserved. Futures: Continuations future<cpp_int> x = async([]{ return fibonacci<cpp_int>(100); }); future<cpp_int> y = x.then([](future<cpp_int> x){ return cpp_int(x.get() * 2); }); future<cpp_int> z = x.then([](future<cpp_int> x){ return cpp_int(x.get() / 15); }); 47 Assertion failed: (px != 0), function operator->, file shared_ptr.hpp, line 648.](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-89-2048.jpg)
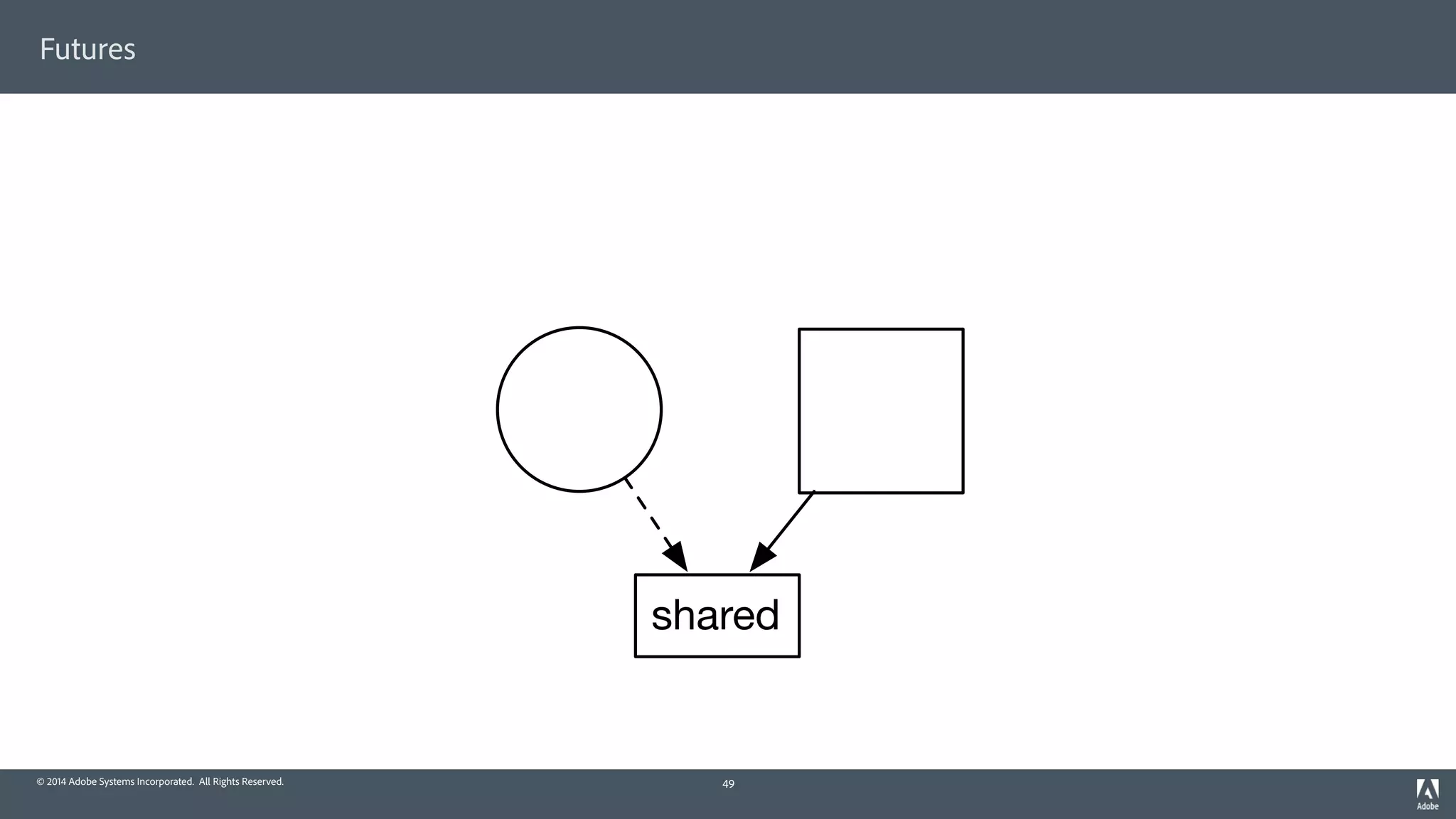
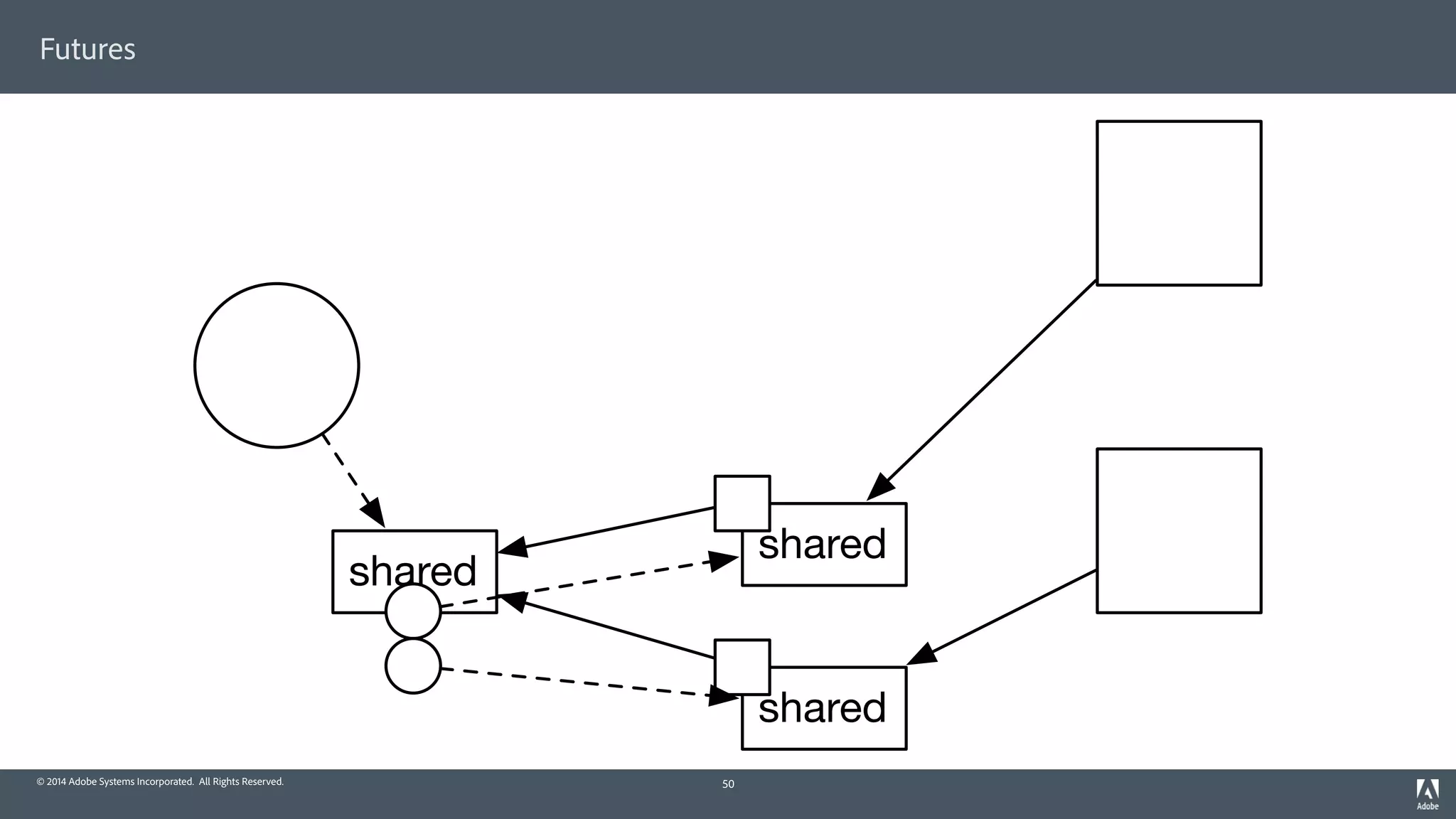
![© 2014 Adobe Systems Incorporated. All Rights Reserved. Continuations ! Desired behavior ! A future should behave as a regular type - a token for the actual value ! shared_futures let me pass them around and do multiple get() operations, but don’t fix continuations ! [at least with boost] ! Releasing the last instance of a future should cancel (no-op) any unexecuted, contributing, operations 48](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-90-2048.jpg)

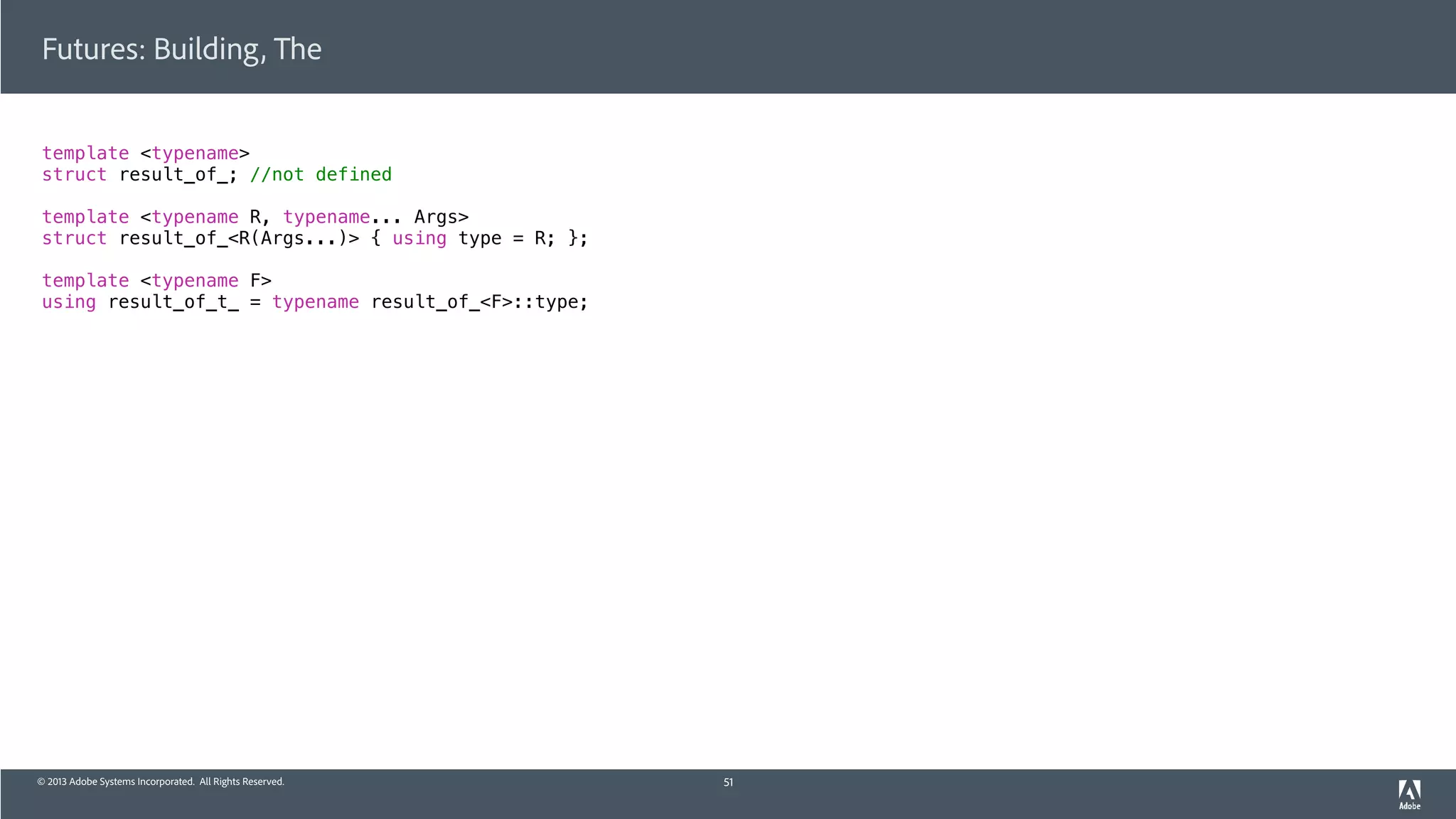
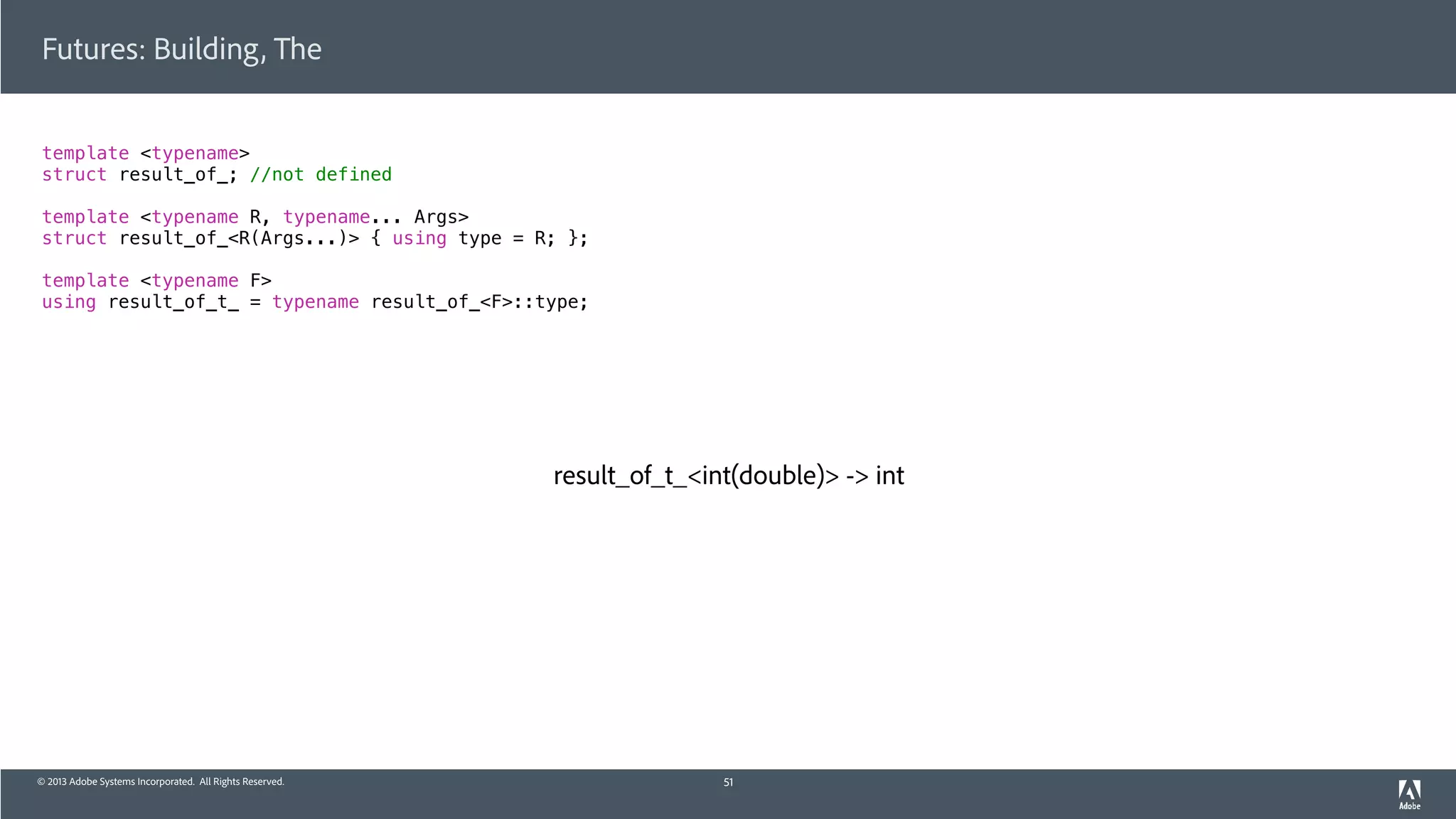

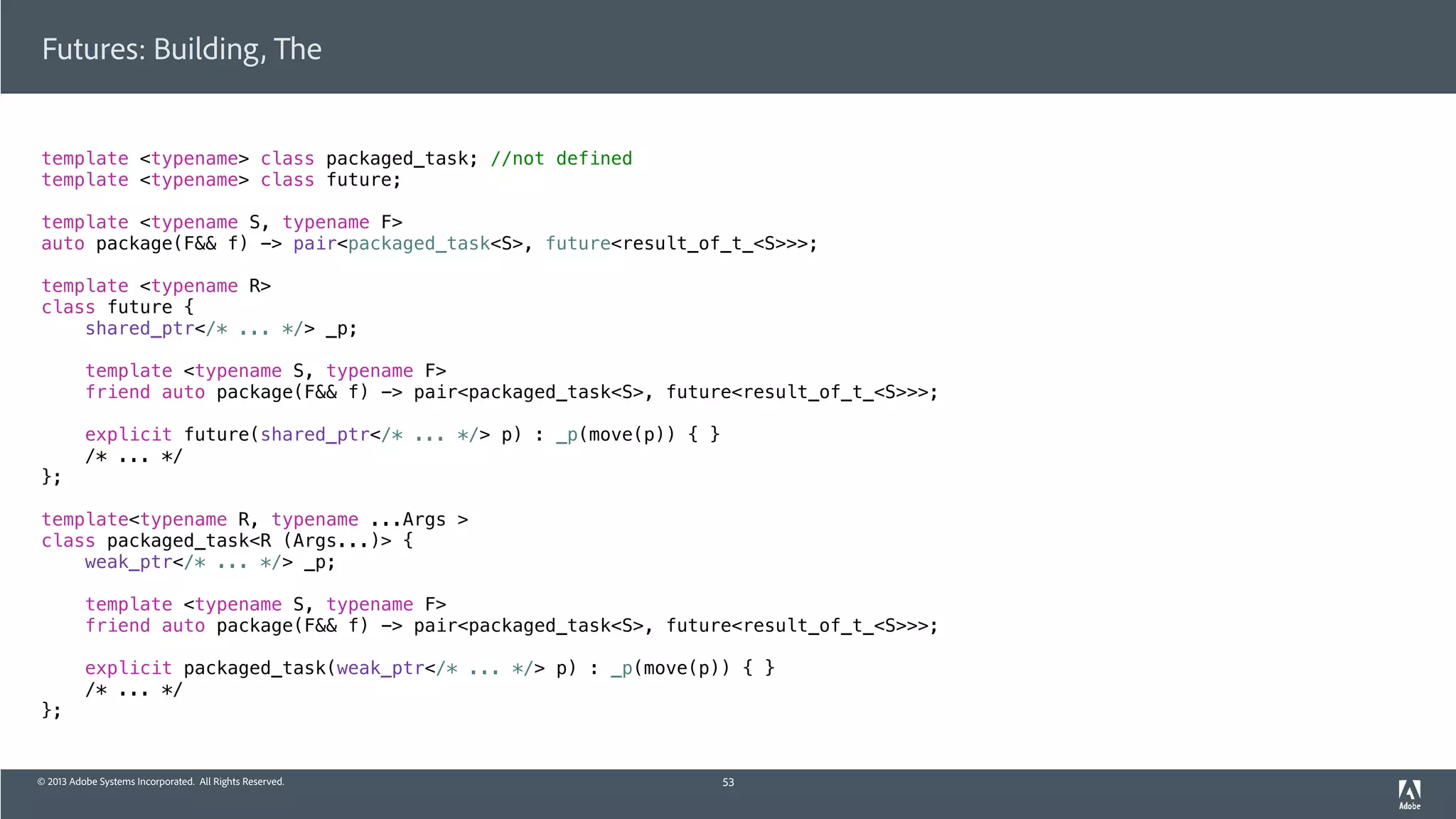

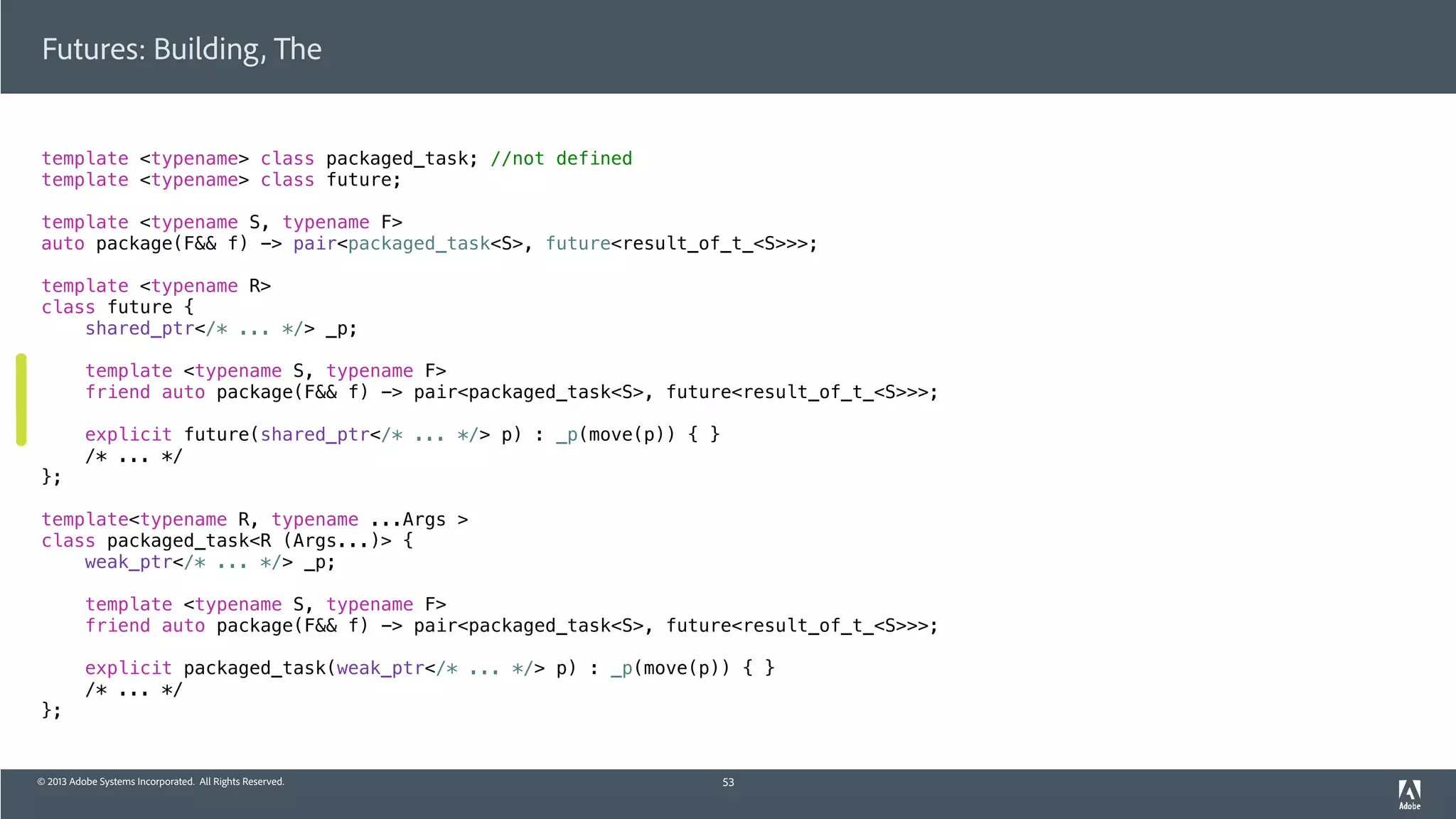
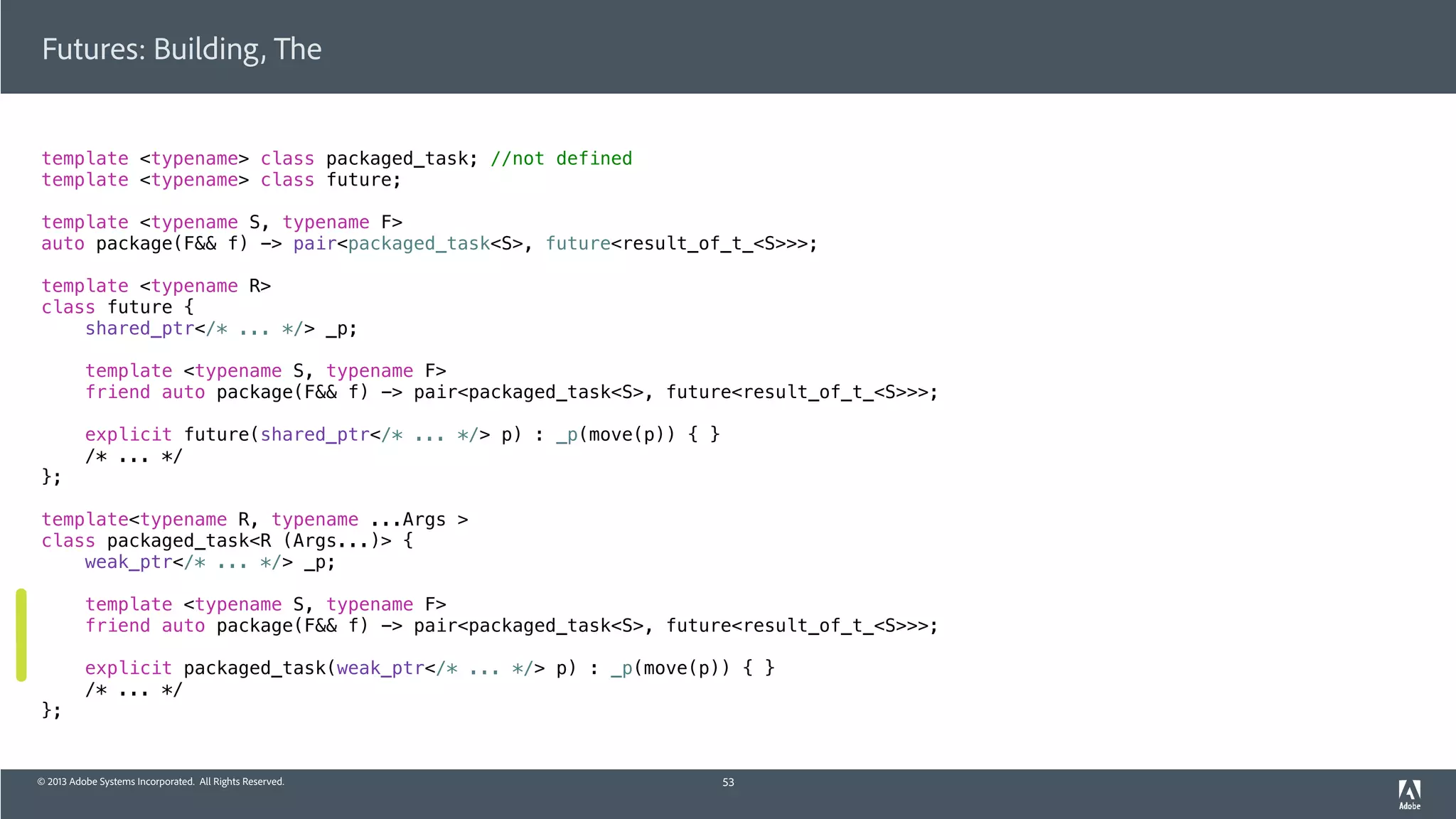
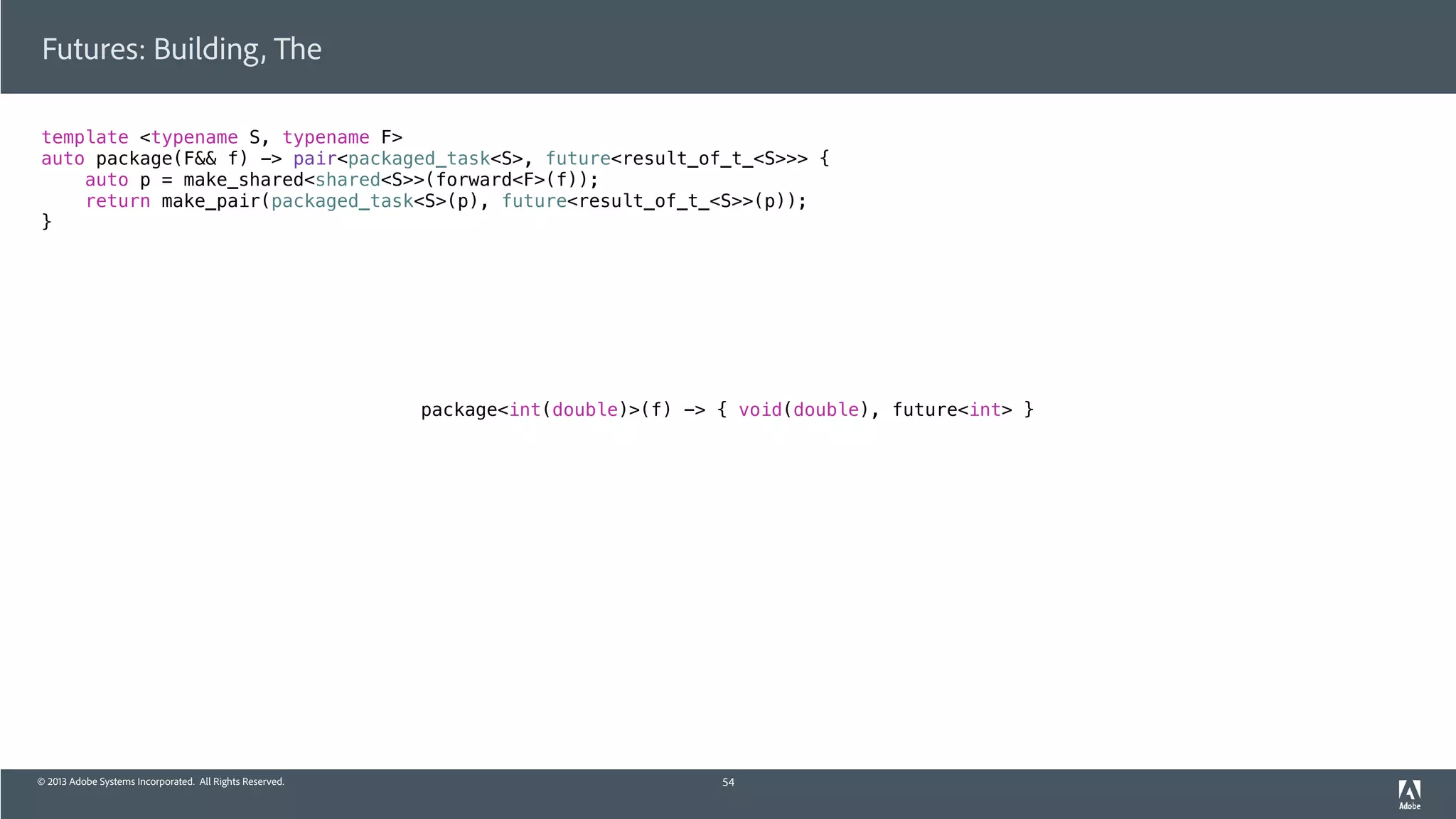
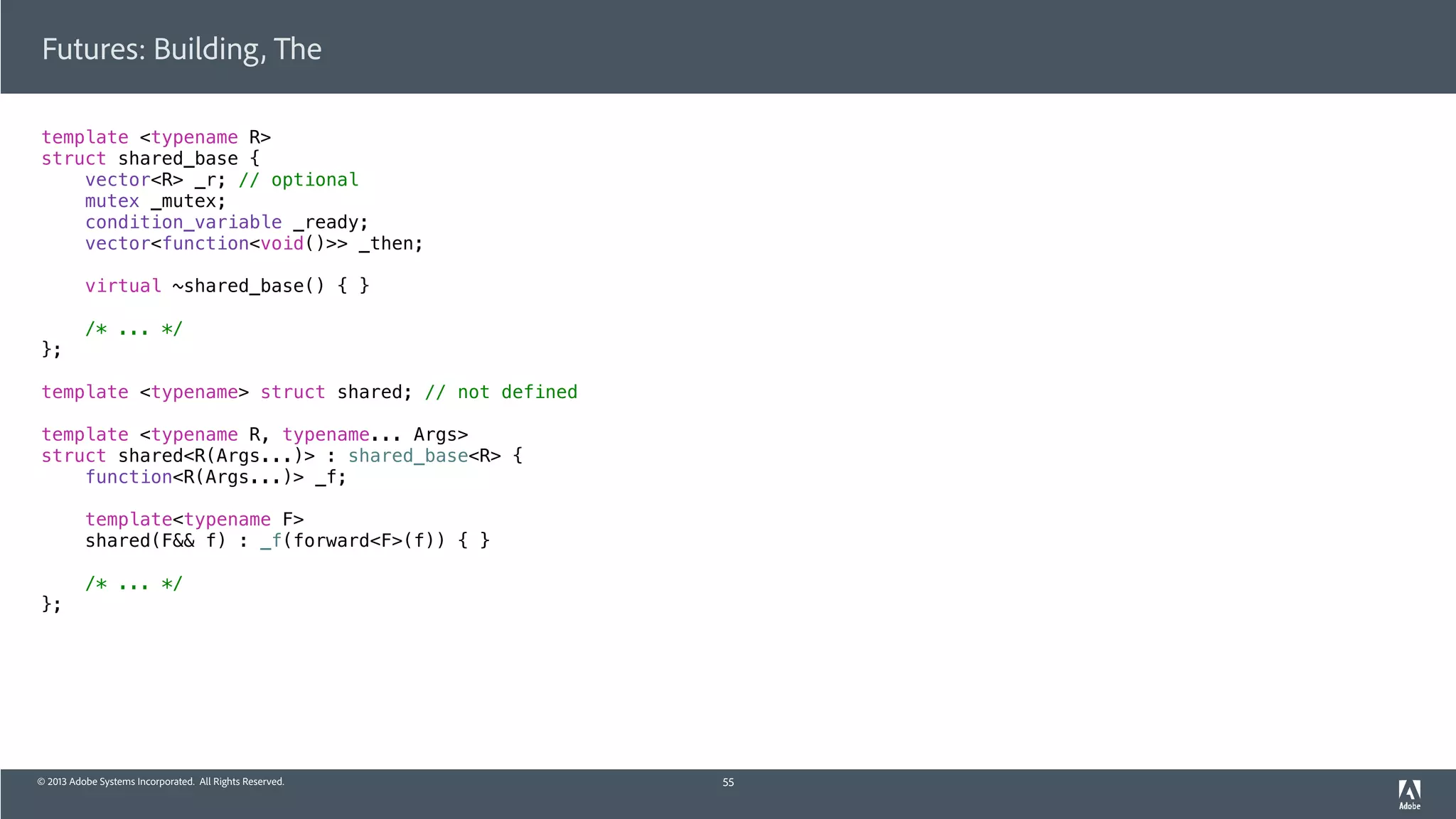
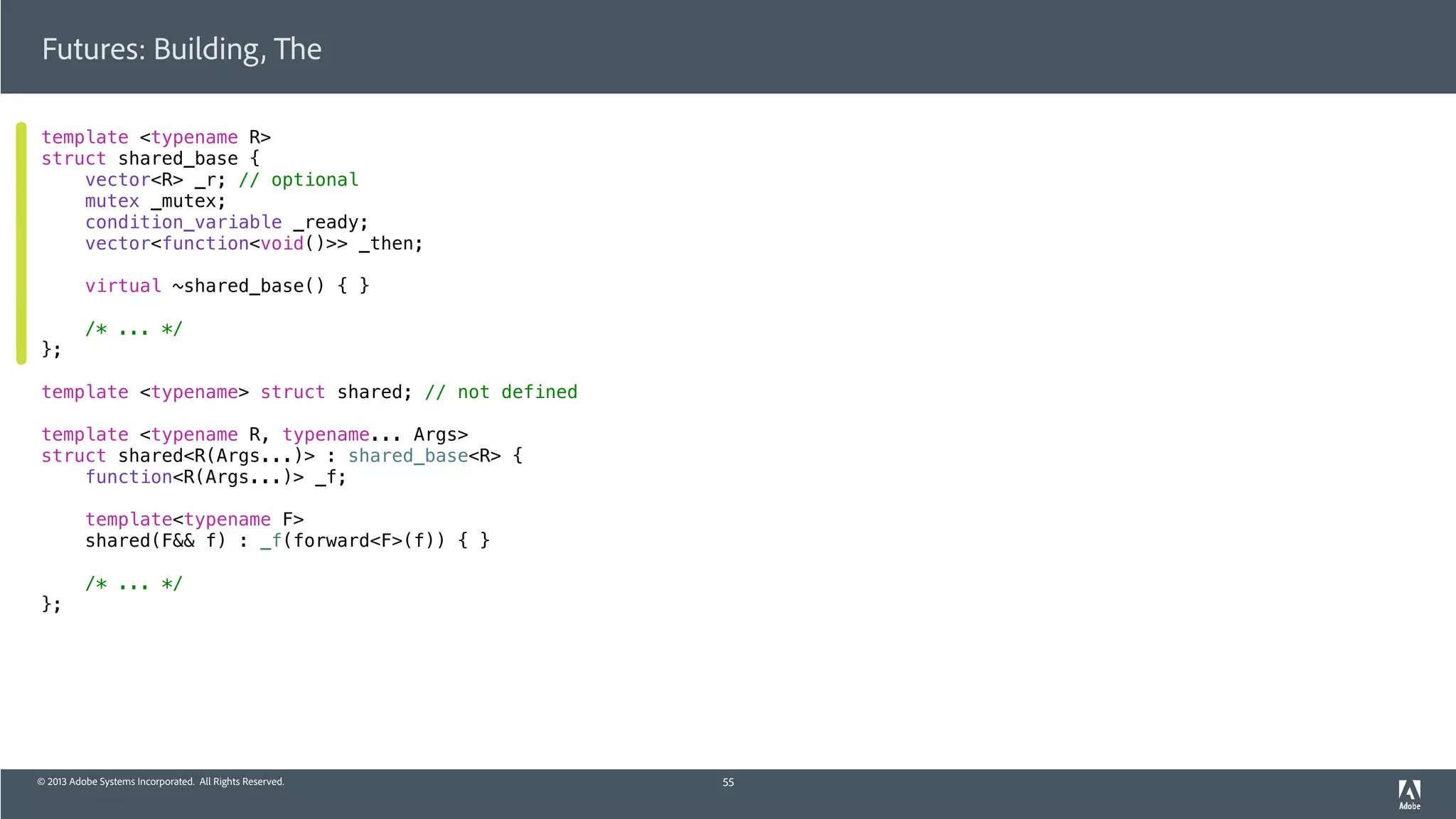
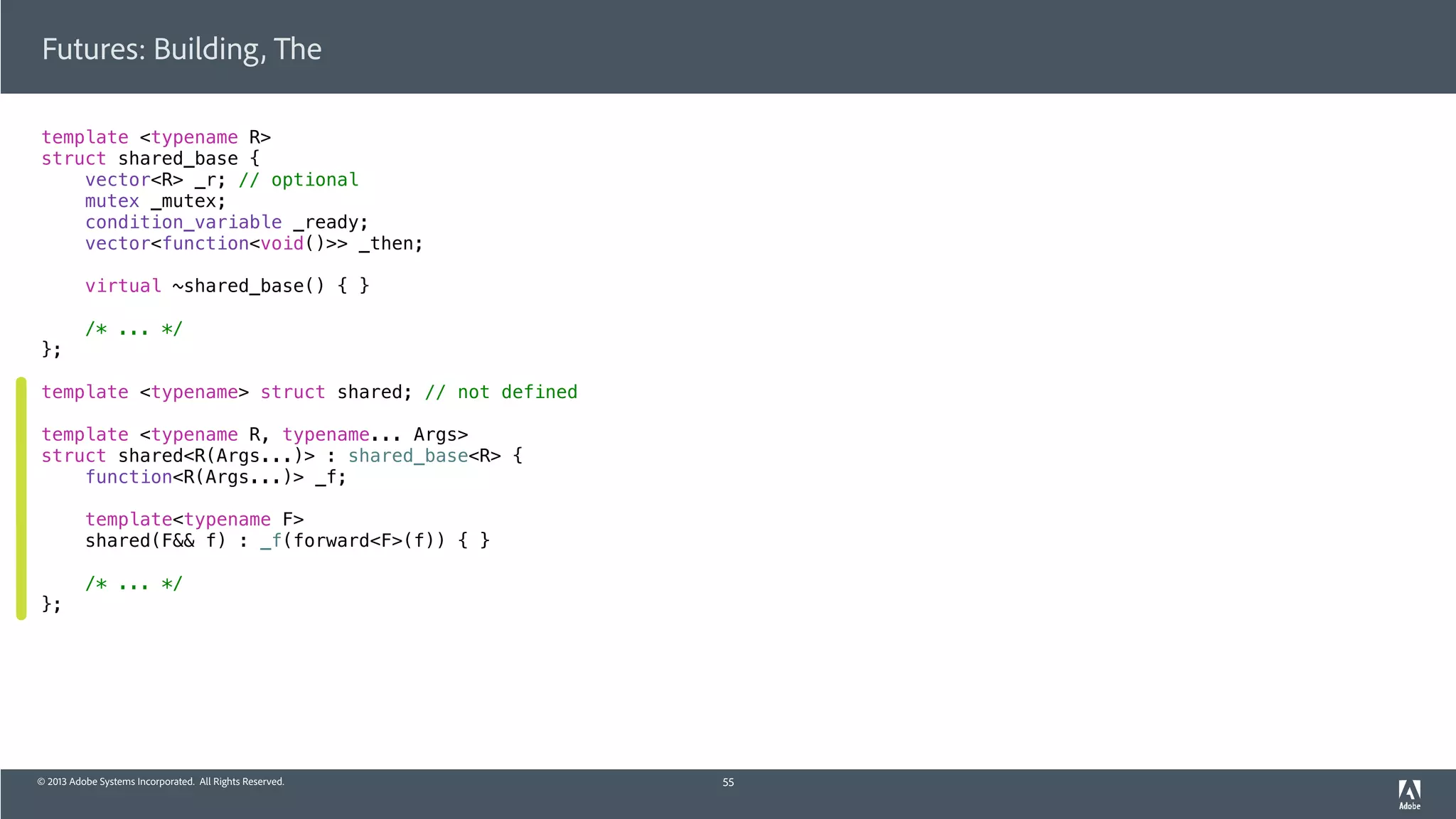

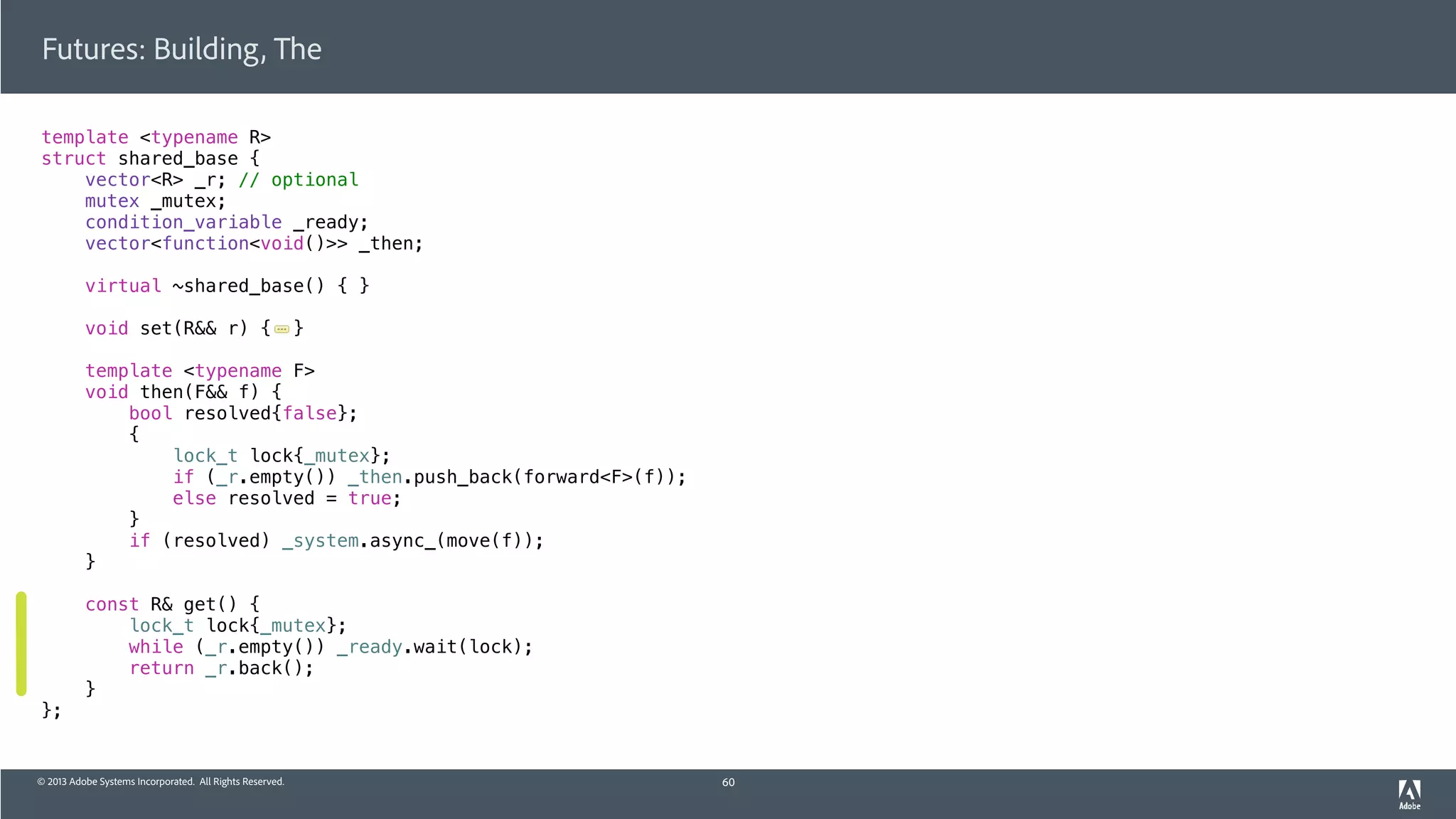
![© 2013 Adobe Systems Incorporated. All Rights Reserved. template <typename R> class future { shared_ptr<shared_base<R>> _p; template <typename S, typename F> friend auto package(F&& f) -> pair<packaged_task<S>, future<result_of_t_<S>>>; explicit future(shared_ptr<shared_base<R>> p) : _p(move(p)) { } public: future() = default; template <typename F> auto then(F&& f) { auto pack = package<result_of_t<F(R)>()>([p = _p, f = forward<F>(f)](){ return f(p->_r.back()); }); _p->then(move(pack.first)); return pack.second; } const R& get() const { return _p->get(); } }; Futures: Building, The 59](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-118-2048.jpg)
![© 2013 Adobe Systems Incorporated. All Rights Reserved. template <typename R> class future { shared_ptr<shared_base<R>> _p; template <typename S, typename F> friend auto package(F&& f) -> pair<packaged_task<S>, future<result_of_t_<S>>>; explicit future(shared_ptr<shared_base<R>> p) : _p(move(p)) { } public: future() = default; template <typename F> auto then(F&& f) { auto pack = package<result_of_t<F(R)>()>([p = _p, f = forward<F>(f)](){ return f(p->_r.back()); }); _p->then(move(pack.first)); return pack.second; } const R& get() const { return _p->get(); } }; Futures: Building, The 59](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-119-2048.jpg)
![© 2013 Adobe Systems Incorporated. All Rights Reserved. template <typename R> class future { shared_ptr<shared_base<R>> _p; template <typename S, typename F> friend auto package(F&& f) -> pair<packaged_task<S>, future<result_of_t_<S>>>; explicit future(shared_ptr<shared_base<R>> p) : _p(move(p)) { } public: future() = default; template <typename F> auto then(F&& f) { auto pack = package<result_of_t<F(R)>()>([p = _p, f = forward<F>(f)](){ return f(p->_r.back()); }); _p->then(move(pack.first)); return pack.second; } const R& get() const { return _p->get(); } }; Futures: Building, The 59](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-120-2048.jpg)
![© 2013 Adobe Systems Incorporated. All Rights Reserved. template <typename R> class future { shared_ptr<shared_base<R>> _p; template <typename S, typename F> friend auto package(F&& f) -> pair<packaged_task<S>, future<result_of_t_<S>>>; explicit future(shared_ptr<shared_base<R>> p) : _p(move(p)) { } public: future() = default; template <typename F> auto then(F&& f) { auto pack = package<result_of_t<F(R)>()>([p = _p, f = forward<F>(f)](){ return f(p->_r.back()); }); _p->then(move(pack.first)); return pack.second; } const R& get() const { return _p->get(); } }; Futures: Building, The 59](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-121-2048.jpg)
![© 2013 Adobe Systems Incorporated. All Rights Reserved. Futures: Continuations future<cpp_int> x = async([]{ return fibonacci<cpp_int>(100); }); future<cpp_int> y = x.then([](const cpp_int& x){ return cpp_int(x * 2); }); future<cpp_int> z = x.then([](const cpp_int& x){ return cpp_int(x / 15); }); cout << y.get() << endl; cout << z.get() << endl; 63](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-128-2048.jpg)
![© 2013 Adobe Systems Incorporated. All Rights Reserved. Futures: Continuations future<cpp_int> x = async([]{ return fibonacci<cpp_int>(100); }); future<cpp_int> y = x.then([](const cpp_int& x){ return cpp_int(x * 2); }); future<cpp_int> z = x.then([](const cpp_int& x){ return cpp_int(x / 15); }); cout << y.get() << endl; cout << z.get() << endl; 63 708449696358523830150 23614989878617461005](https://image.slidesharecdn.com/concurrency-150305041657-conversion-gate01/75/Better-Code-Concurrency-129-2048.jpg)