Starting point: DCGAN
As a starting point, I decided to use a DCGAN implementation written in Lasagne for MNIST (source).
I had to modify slightly the generator and discriminator’s network so that they could handle 64×64 colour images. I found the DCGAN to be very unreliable and it would occasionally manage to learn to generate something that looks like the dataset somewhat only a small fraction of the time. Otherwise, it could spend hundreds or thousands of epochs learning nothing useful.
Here is a set of random sample images produced by the generator of the best DCGAN model I trained:
Next model: WGAN
Since the Wasserstein GAN is reputed to be much more stable under training, I decided to try an implementation. It worked more often than the DCGAN, but still had a high failure rate and was slow to train. Moreover, it had a strange behavior where it would frequently start to learn something for a few hundred epochs and then all of a sudden the critics loss would crash towards 0 in a few epochs and the generator would unlearn everything it had learned and went back to produce garbage.
Problem: limited time and computational resources
In order to save precious time, I implemented a system that would detect when the critics loss went very low for more than 20 epochs and then abort training. This allowed me to search over a grid of hyperparameters more efficiently.
I did not end up spending much time on WGAN and DCGAN, because I decided to try an even more recent GAN implementation called the LSGAN (Least-Squares GAN). It turned out to produce better results compared to the other 2 implementations.
LSGAN: Best architecture
I tried numerous architectures for the generator and critic’s neural network, but I obtrained the best results with the simplest architecture that I considered, both in terms of training stability and image quality.
Sample images from LSGAN
This is a sample image from my LSGAN. It uses the simplest architecture I tried, with only 3 transpose convolutions.

Issues with the LSGAN generator
As you can see from this sample, there is definitely an issue with image quality and noticeable although not too severe mode collapse.
- Avoiding the checkboard artifacts issue by selecting our transpose convolutions wisely in our generator or by using upsampling via interpolation.
- Feature Matching, perhaps by changing our loss function or adding an additional weighted term which is based on a distance in an intermediate layer of the discriminator (feature maps space instead of pixels space).
There are known solutions to explore and help with the mode collapse, in particular:
This will be attempted if time permits.
Improved sample
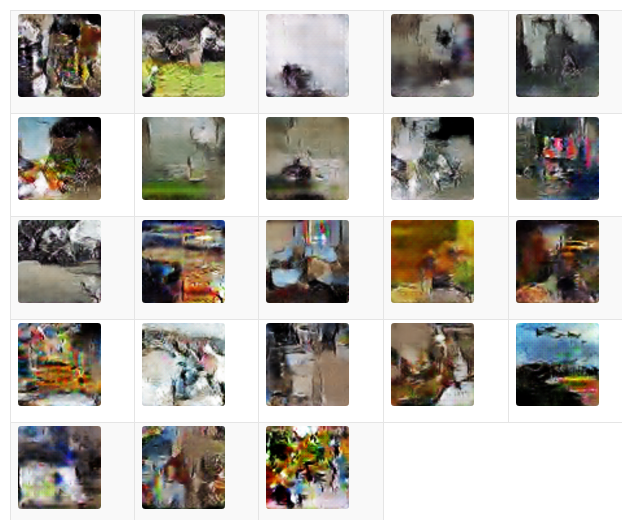
Here is a sample image. It was produced with the LSGAN architecture #1 using the following parameters:
- Total training epochs: 1500
- Learning rate eta: 0.0001
- Optimizer: RMSProp
- Batch size: 128
- Sample images produced at epoch: 254
The image contains 100 samples of size 64×64 pixels each, arranged in a 10×10 grid.

Artifacts are still present
Even though this image is a lot smoother, the checkerboard artifact mentioned above is still present in every single image, although not very obvious, it can be seen clearly by zooming in and scaling up one of the images in the sample above:
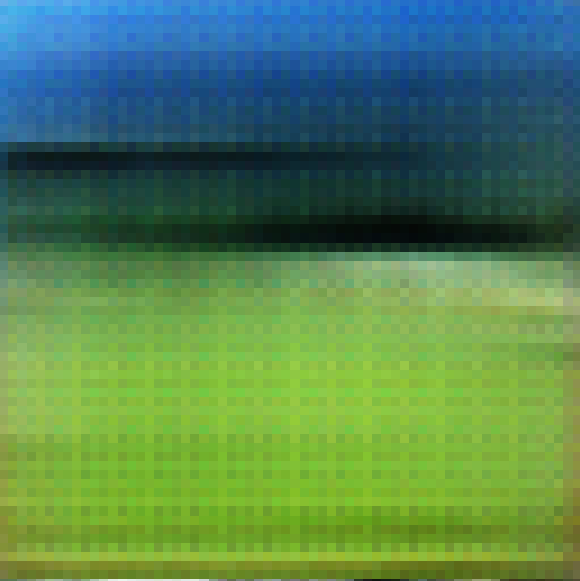
Notice that the checkerboard pattern contains a very high-frequency pattern: the intensity alternates every other pixel. Another pattern can be seen to be repeated every 5 pixels and yet another every 9 pixels.
This phenomenon is caused by the filters of transposed convolutions interfering with themselves in constructive and destructive patterns, as explained in this blog post.
In order to tackle this issue, we replaced every transposed convolution with a regular convolution with stride 1 and “same” padding, in order for the convolution layer to preserve the image dimension. Then, we added an upsampling layer smoothing the scaling output via bilinear interpolation.
Unfortunately, this seems to have severely reduced the capacity of the model and severely reduced the sharpness of the images. Moreover, the checkerboard pattern problem was replaced by a new edges artifact issue, as can be seen in the samples below (one of the best result from this architecture):

To obtain good results from such an architecture, it is therefore probably necessary to increase the neural network’s complexity and therefore its capacity. We attempted doing so, using additional convolution layers, fully-connected layers, greater number of filters, and many other tricks, but they all came with their own set of issues, including a much slower training and a significantly higher probability of total failure to improve during training.



 of a GAN is a neural network whose output – no matter the network’s architecture complexity – is simply a floating point number in the interval
of a GAN is a neural network whose output – no matter the network’s architecture complexity – is simply a floating point number in the interval &bg=ffffff&fg=111111&s=0&c=20201002) . As we know, training GANs involves the generator
. As we know, training GANs involves the generator  trying to fool
trying to fool &bg=ffffff&fg=111111&s=0&c=20201002) and
and )&bg=ffffff&fg=111111&s=0&c=20201002) , which correspond to a number between 0 and 1 for each sample from the mini-batch. This is a fairly poor amount of information, making GANs very hard to train. Optimization of the loss functions is generally highly unstable and frequently fails to converge or make any significant improvement, collapses to a very poor local minimum or goes very well for a certain number of epochs, before either the discriminator or the generator overpowers the other and then lead to massive unrecoverable imbalance or to a deterioration of one of the networks and eventual training failure.
, which correspond to a number between 0 and 1 for each sample from the mini-batch. This is a fairly poor amount of information, making GANs very hard to train. Optimization of the loss functions is generally highly unstable and frequently fails to converge or make any significant improvement, collapses to a very poor local minimum or goes very well for a certain number of epochs, before either the discriminator or the generator overpowers the other and then lead to massive unrecoverable imbalance or to a deterioration of one of the networks and eventual training failure. of
of  loss function:
loss function:+=+\lVert+\textbf{y}+-+\hat{\textbf{y}}+\rVert_2.&bg=ffffff&fg=111111&s=0&c=20201002)
 and
and  to VGG-16, denoting by
to VGG-16, denoting by }(\textbf{x})&bg=ffffff&fg=111111&s=0&c=20201002) the activation outputs of VGG-16’s intermediate layer
the activation outputs of VGG-16’s intermediate layer  . Then, we define the new loss function as:
. Then, we define the new loss function as:+=+\lVert\textbf{h}^{(k)}(\textbf{y})+-\textbf{h}^{(k)}(\hat{\textbf{y}})+\rVert_2.&bg=ffffff&fg=111111&s=0&c=20201002)
 -norm would result in similar issues. The problem arises because we are computing our distance function in pixel space.
-norm would result in similar issues. The problem arises because we are computing our distance function in pixel space. computes a distance in the very abstract space of feature maps. Given that
computes a distance in the very abstract space of feature maps. Given that  . Finally, weights could be associated to the various layers
. Finally, weights could be associated to the various layers  .
.