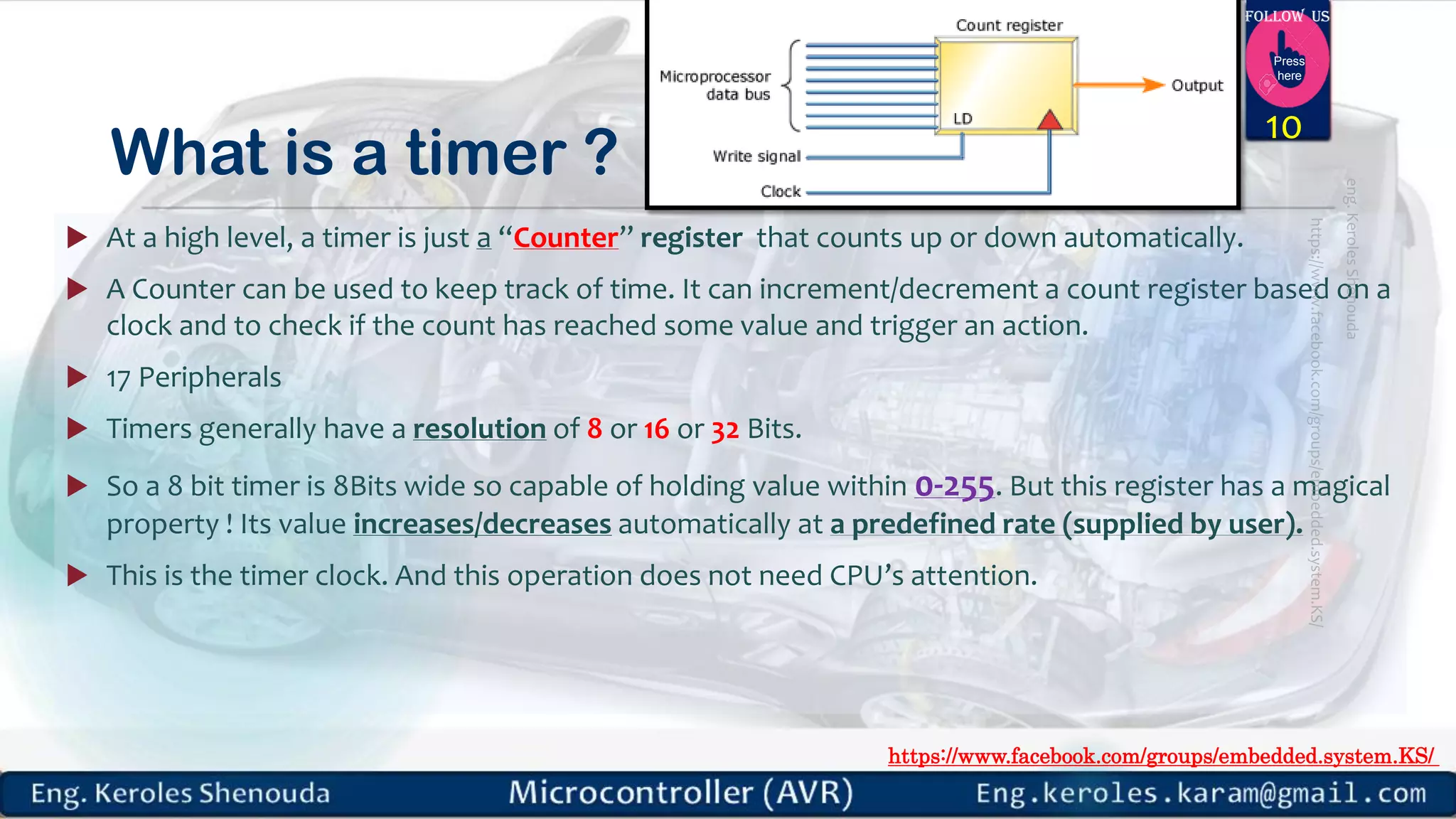
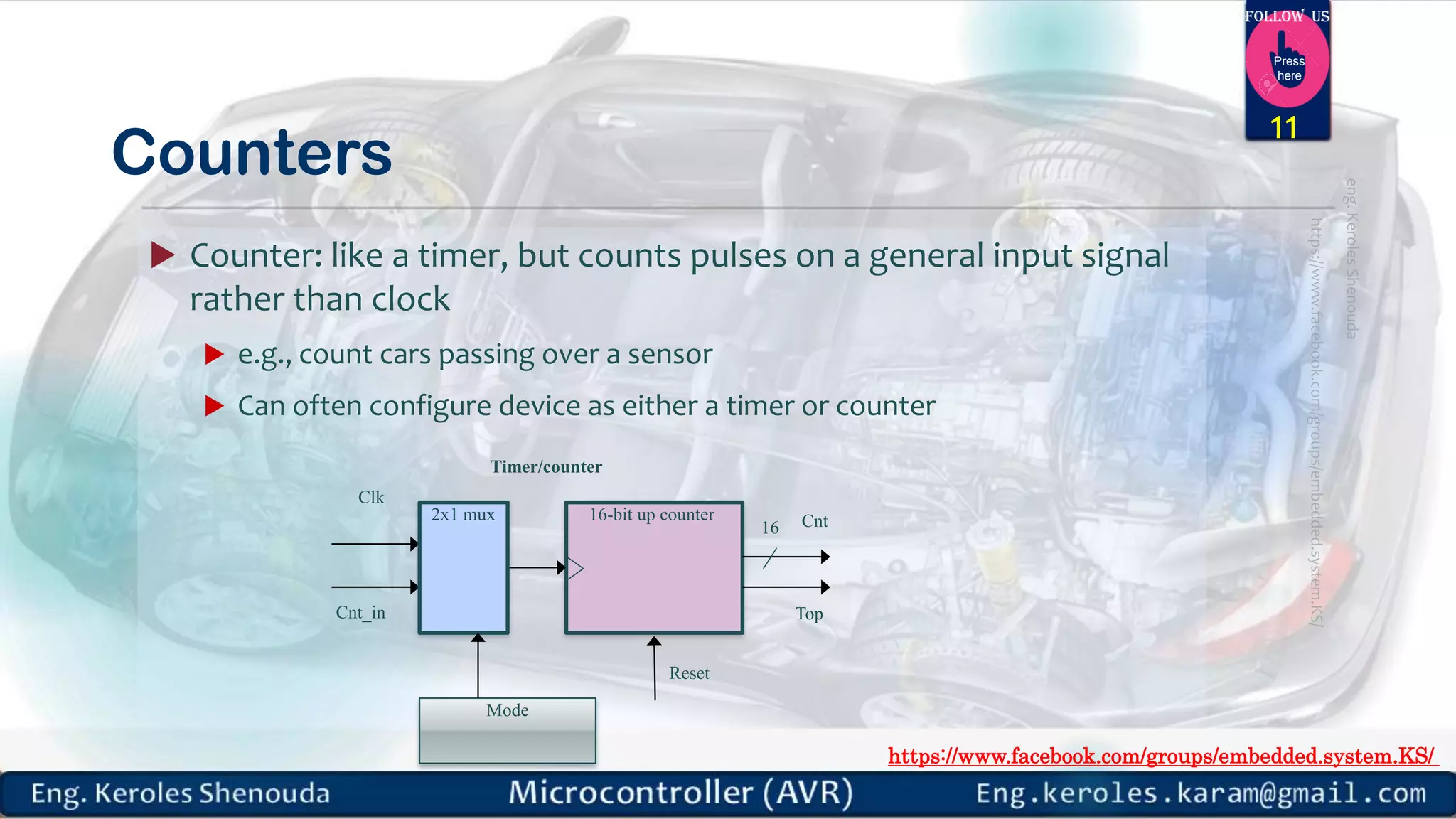
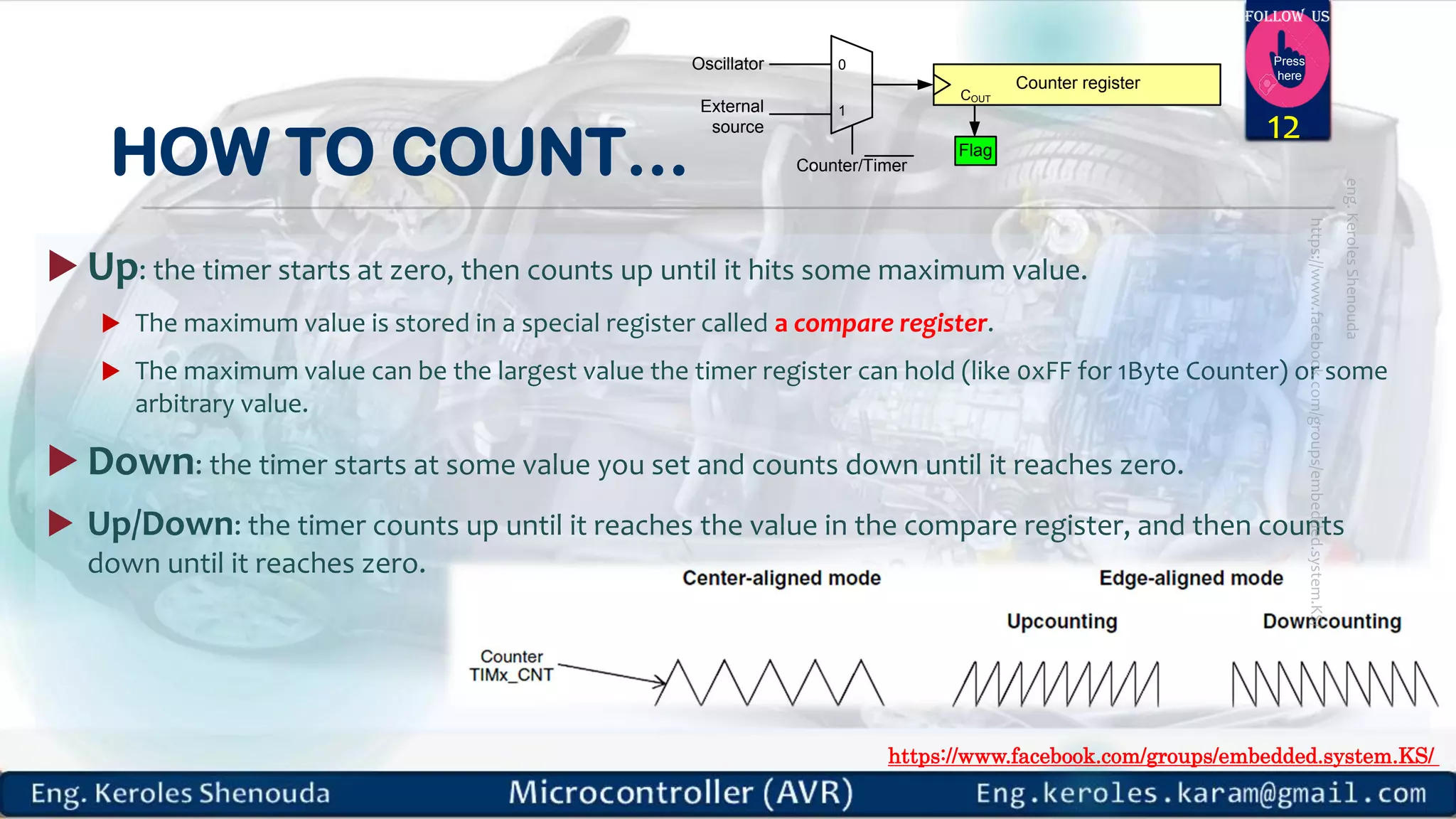
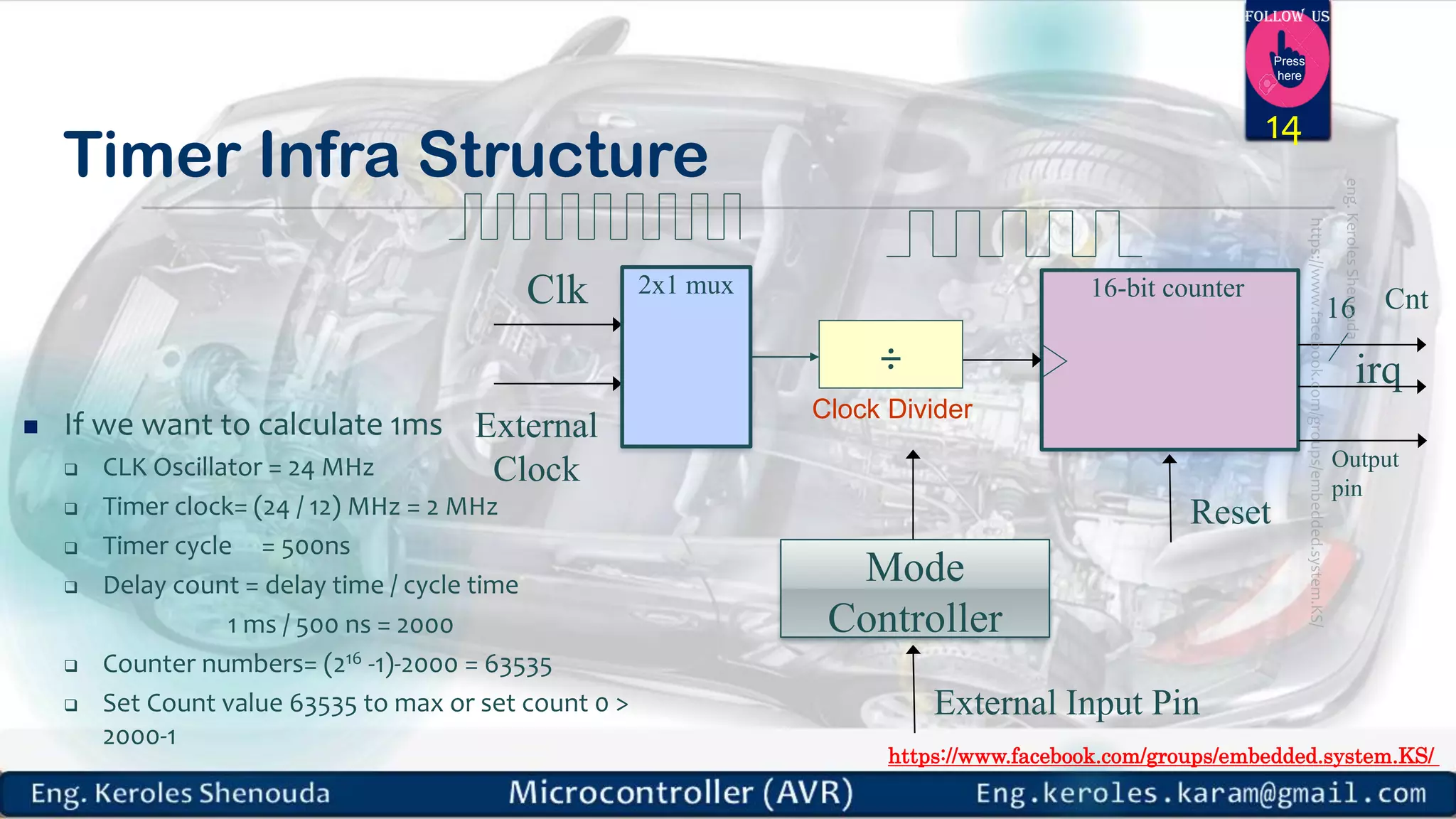
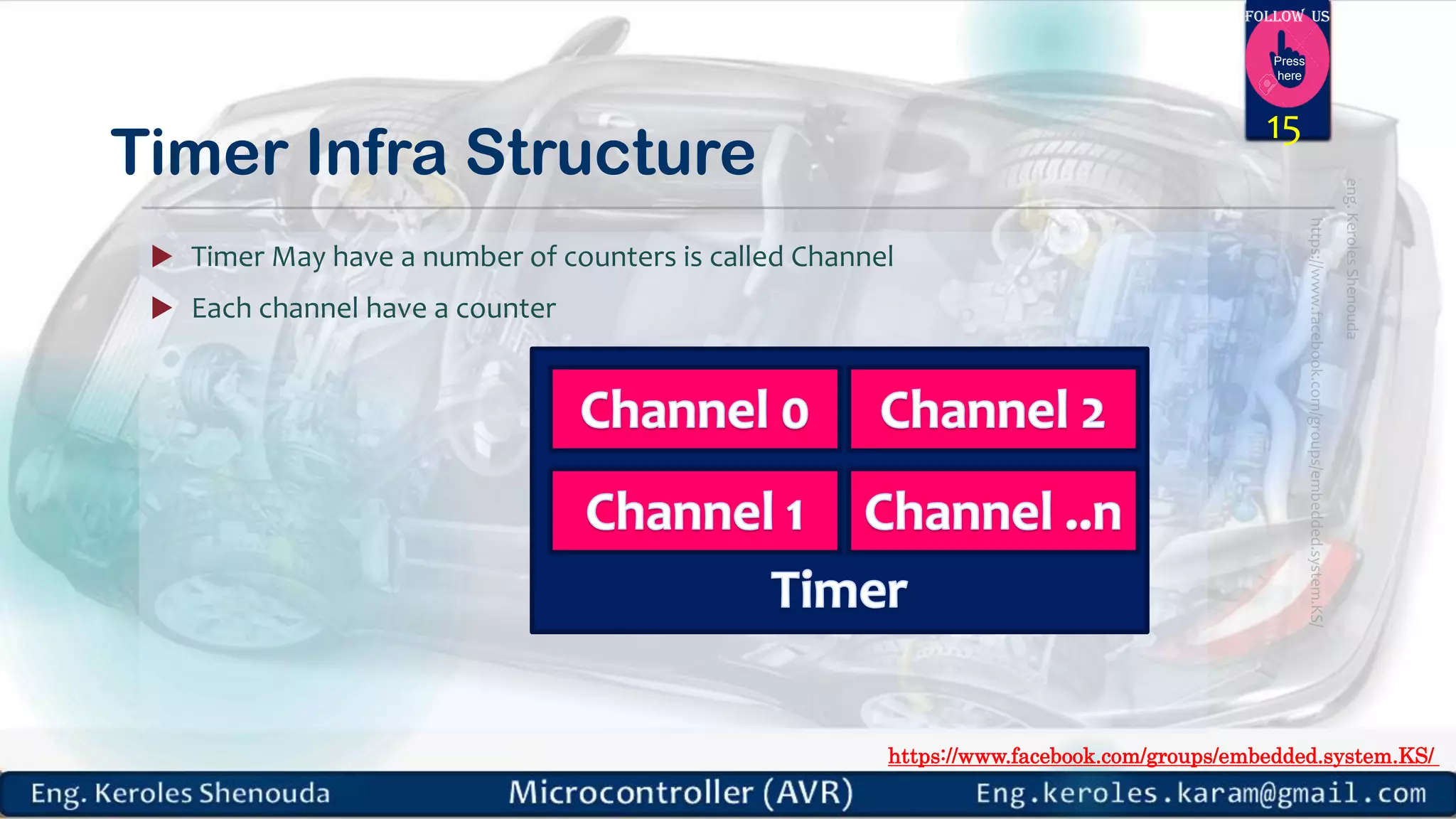
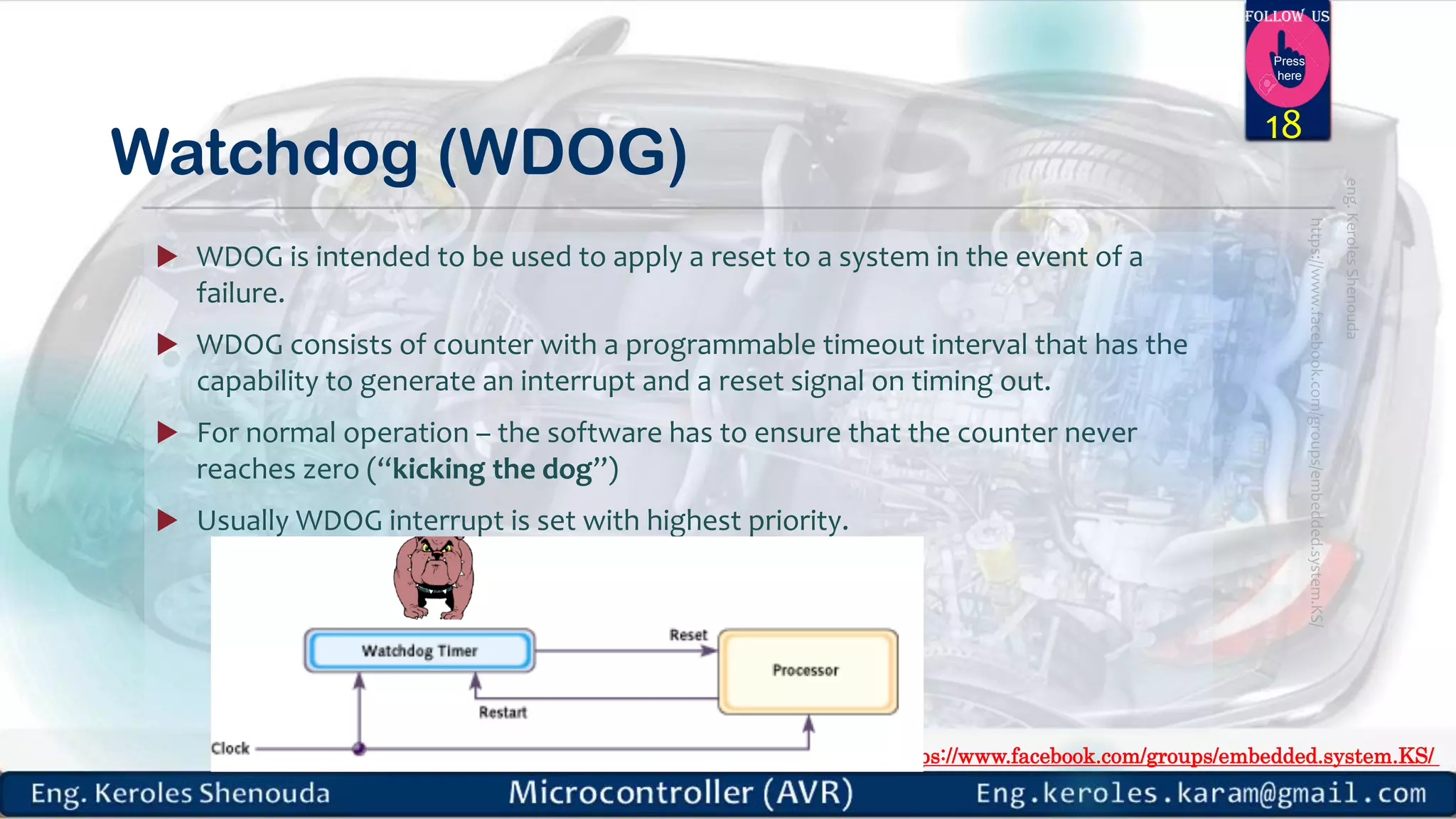
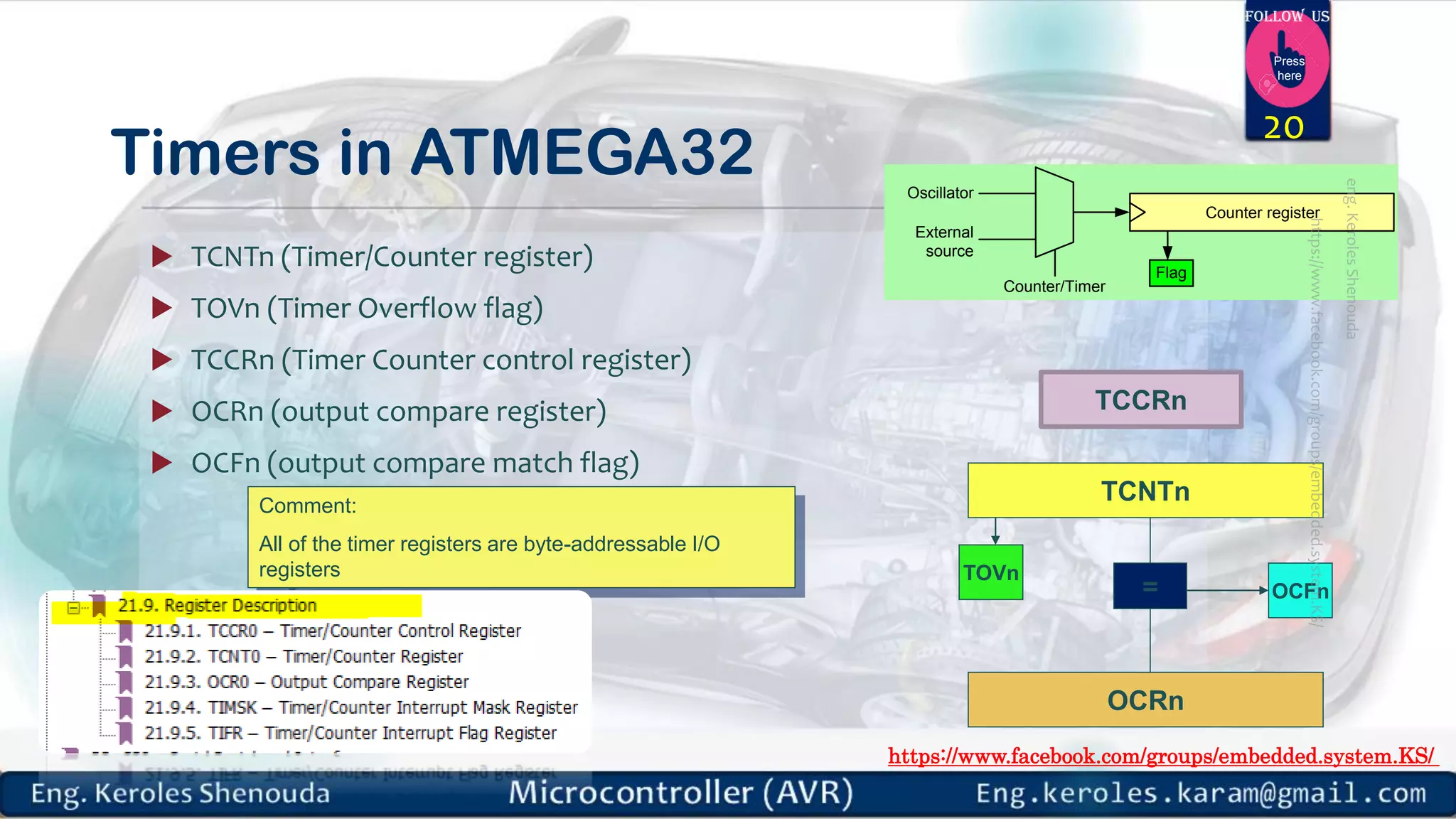
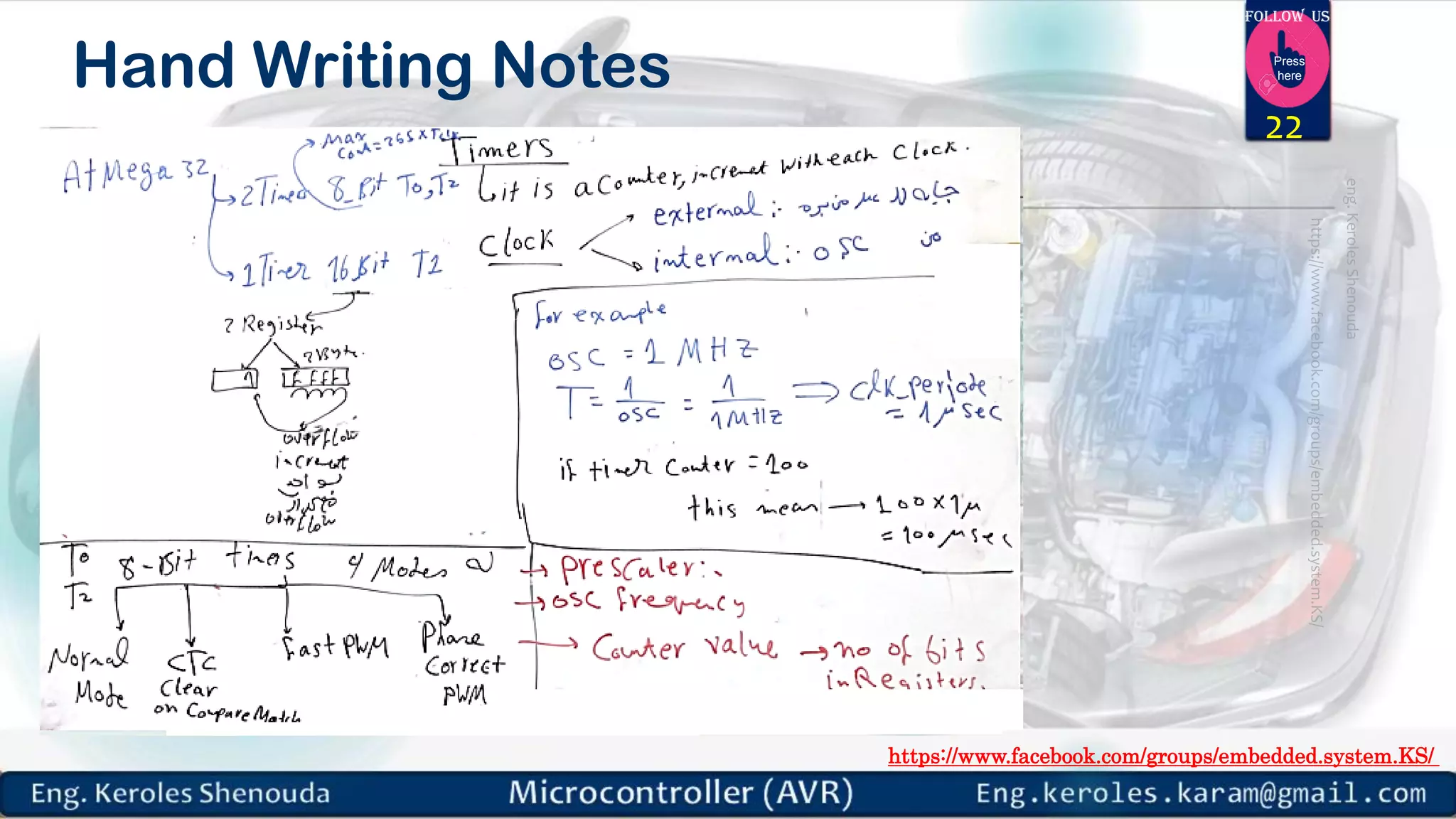
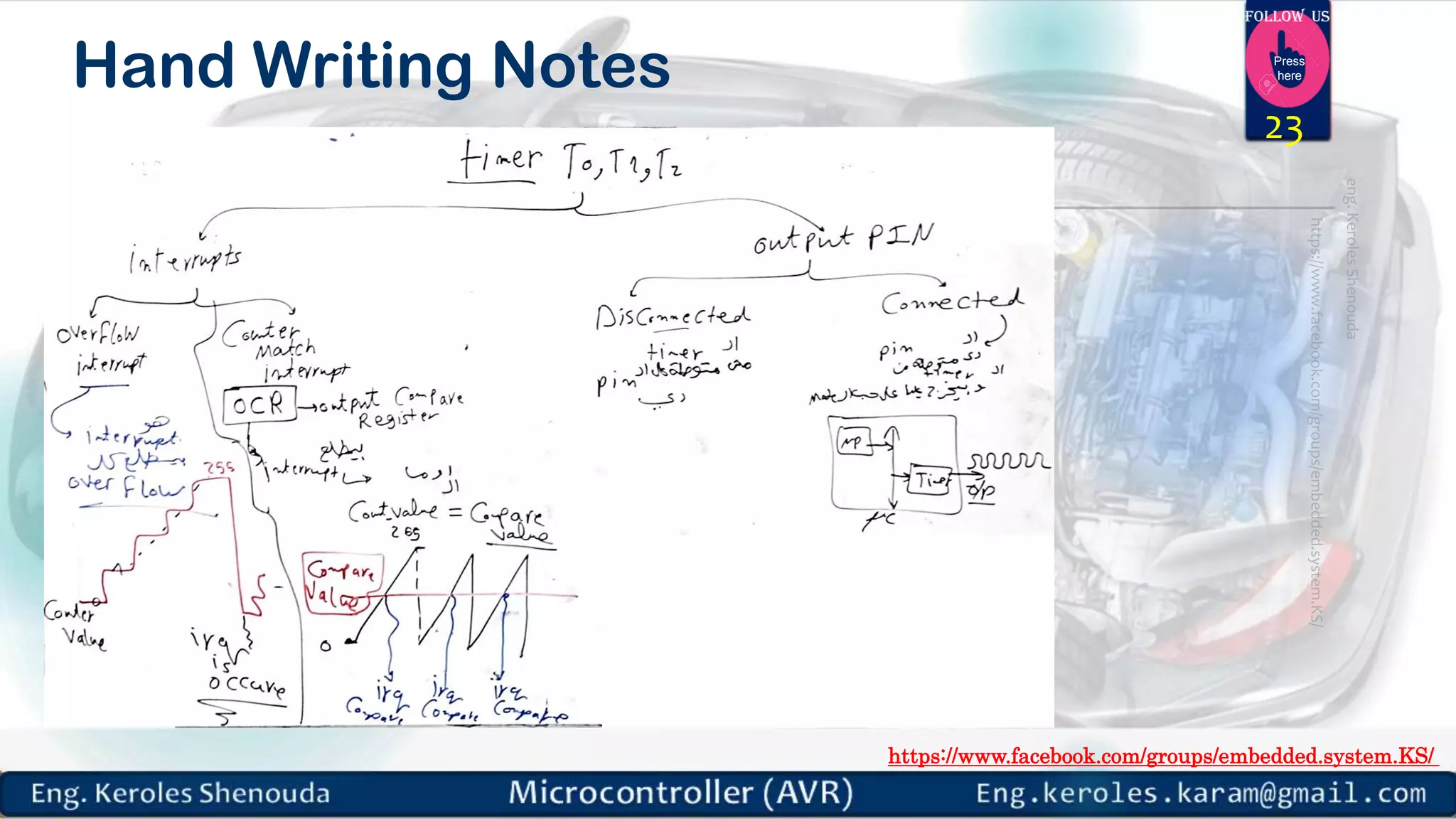
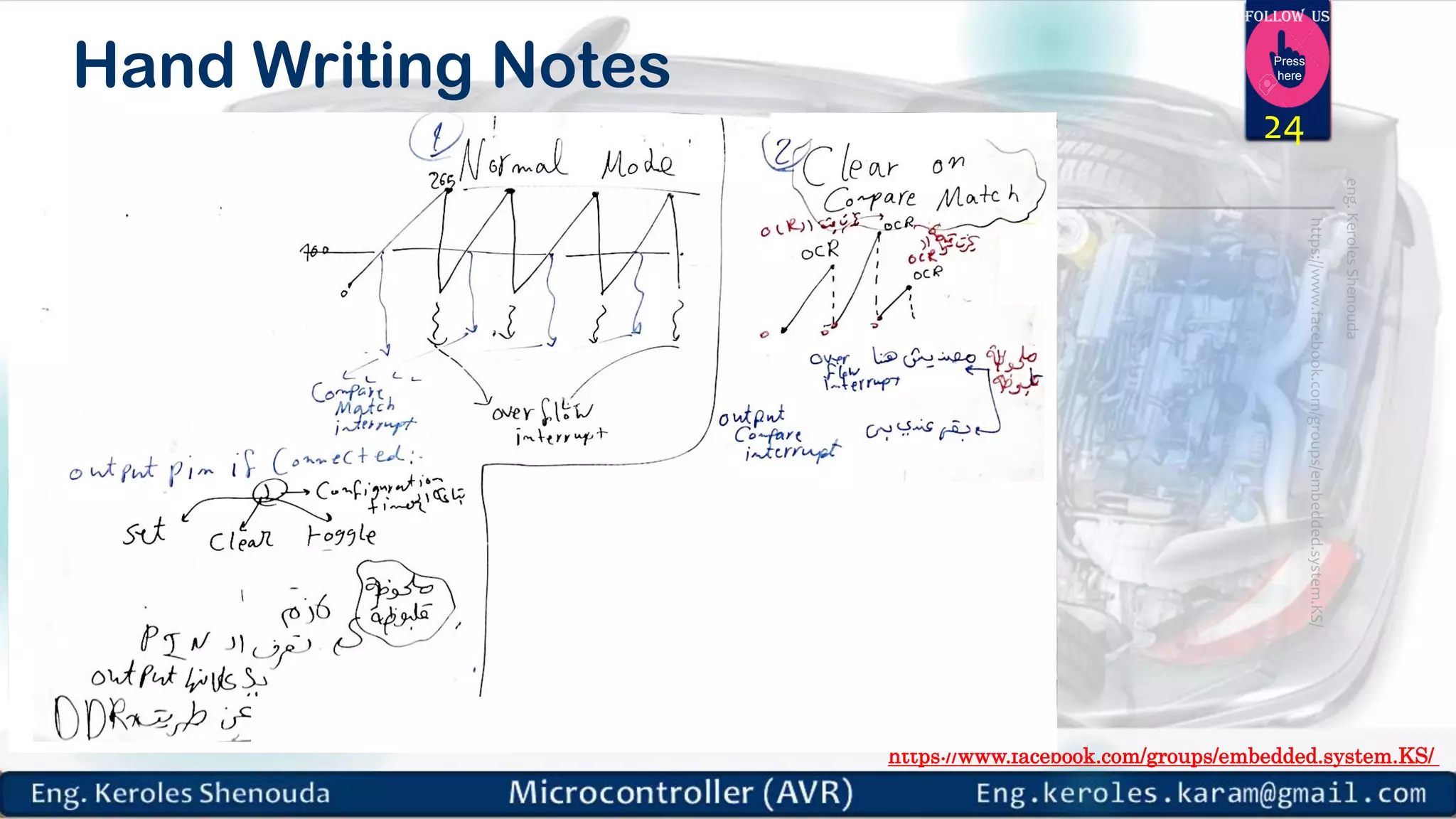
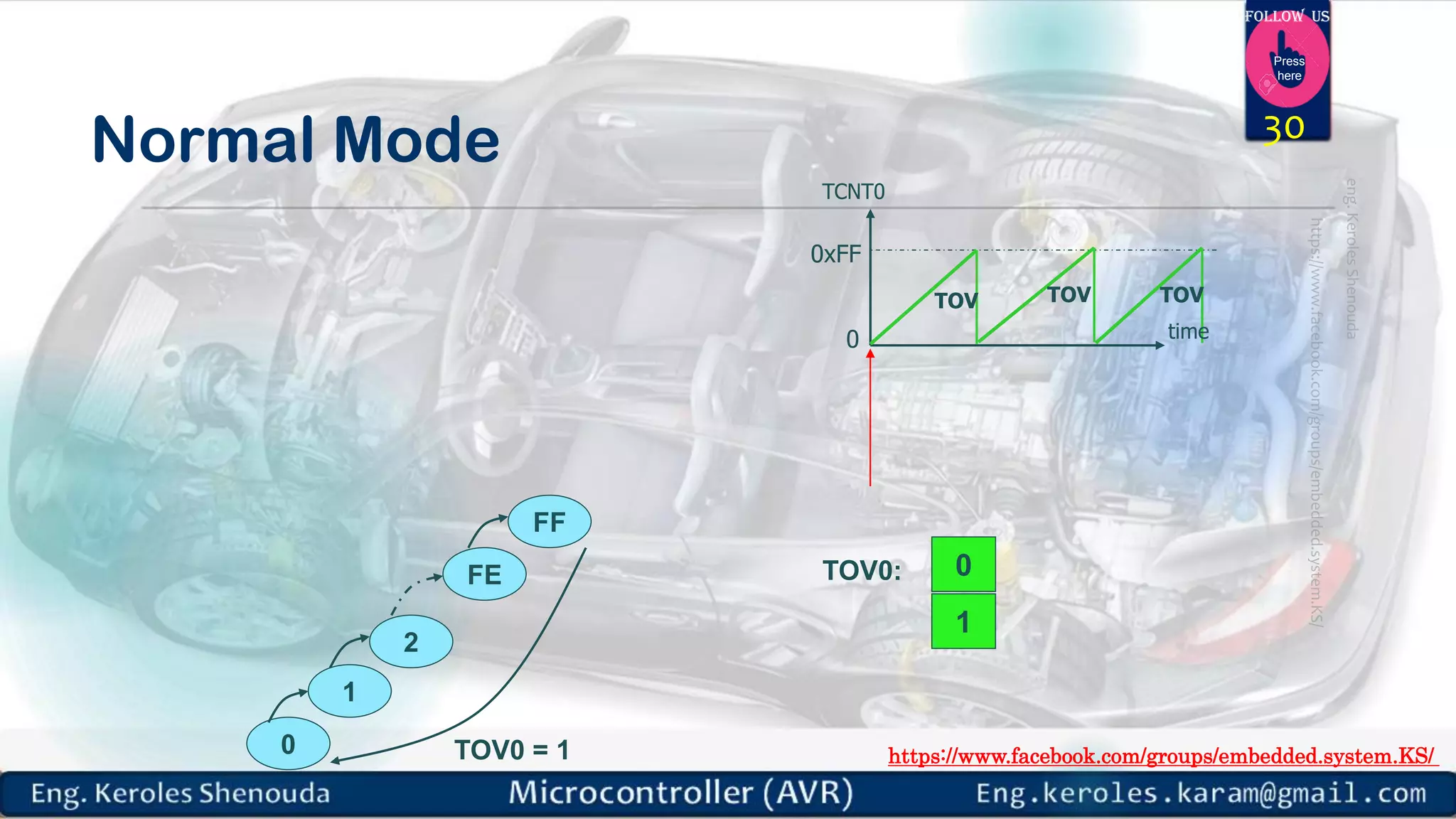
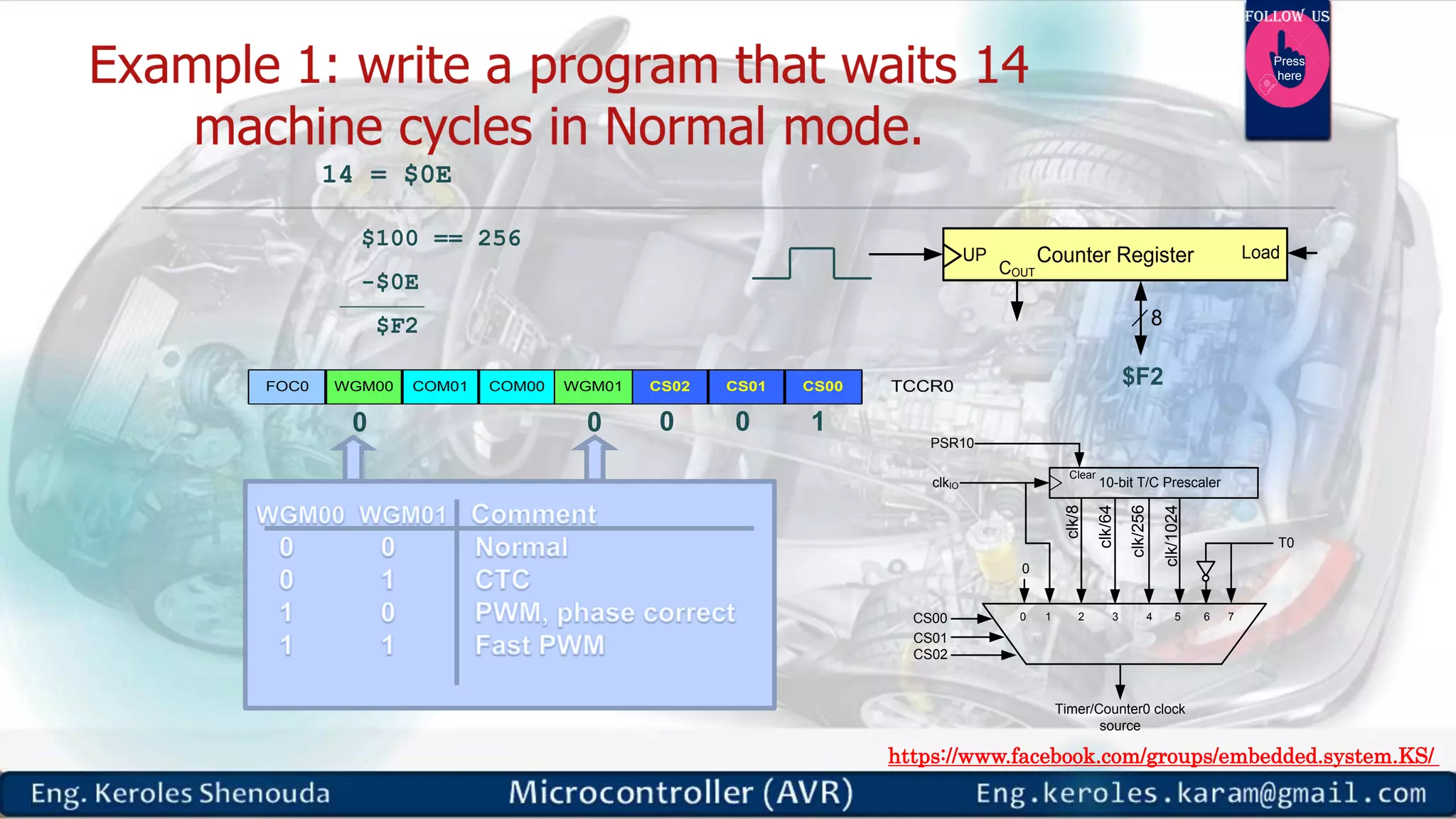
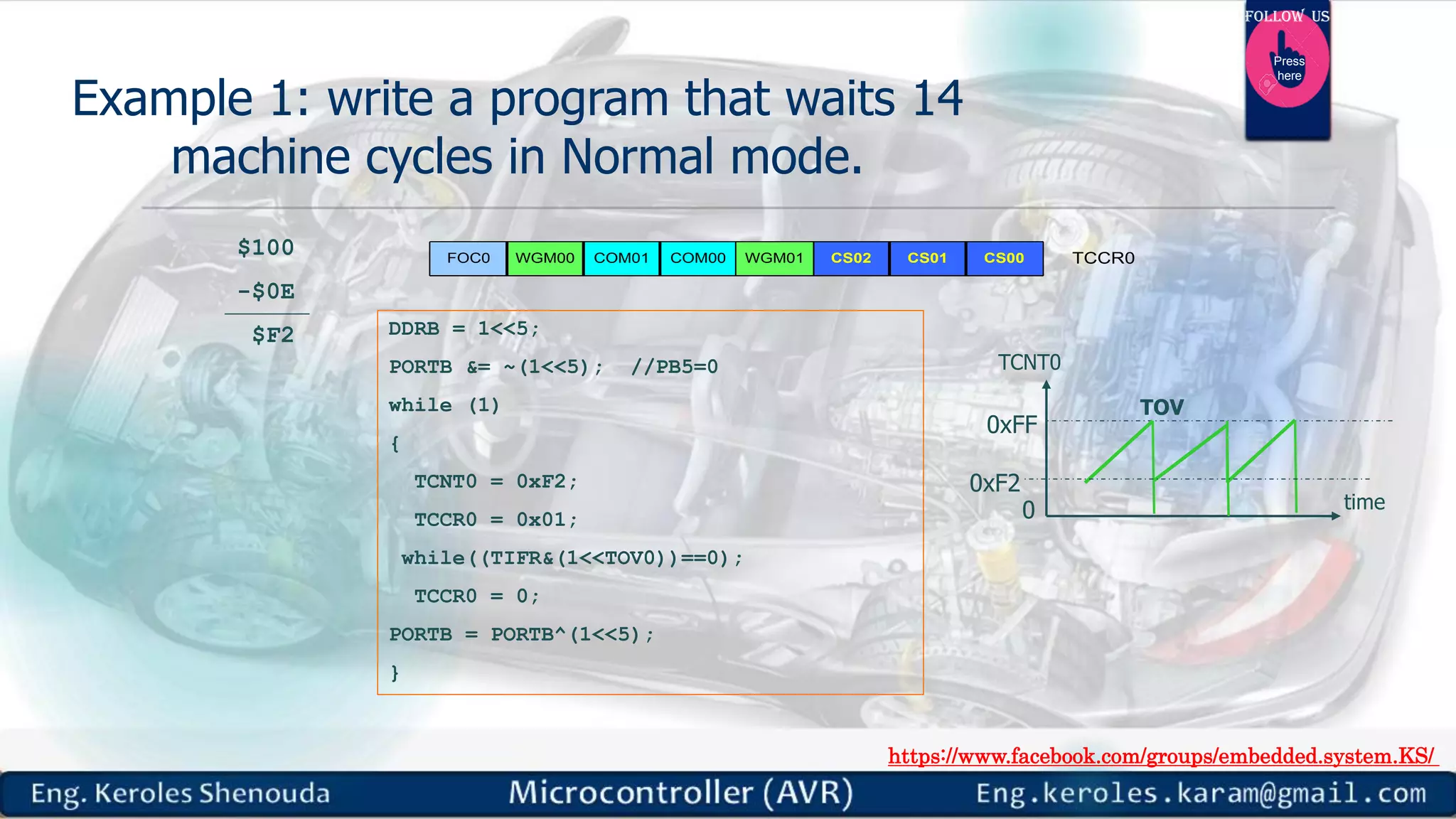
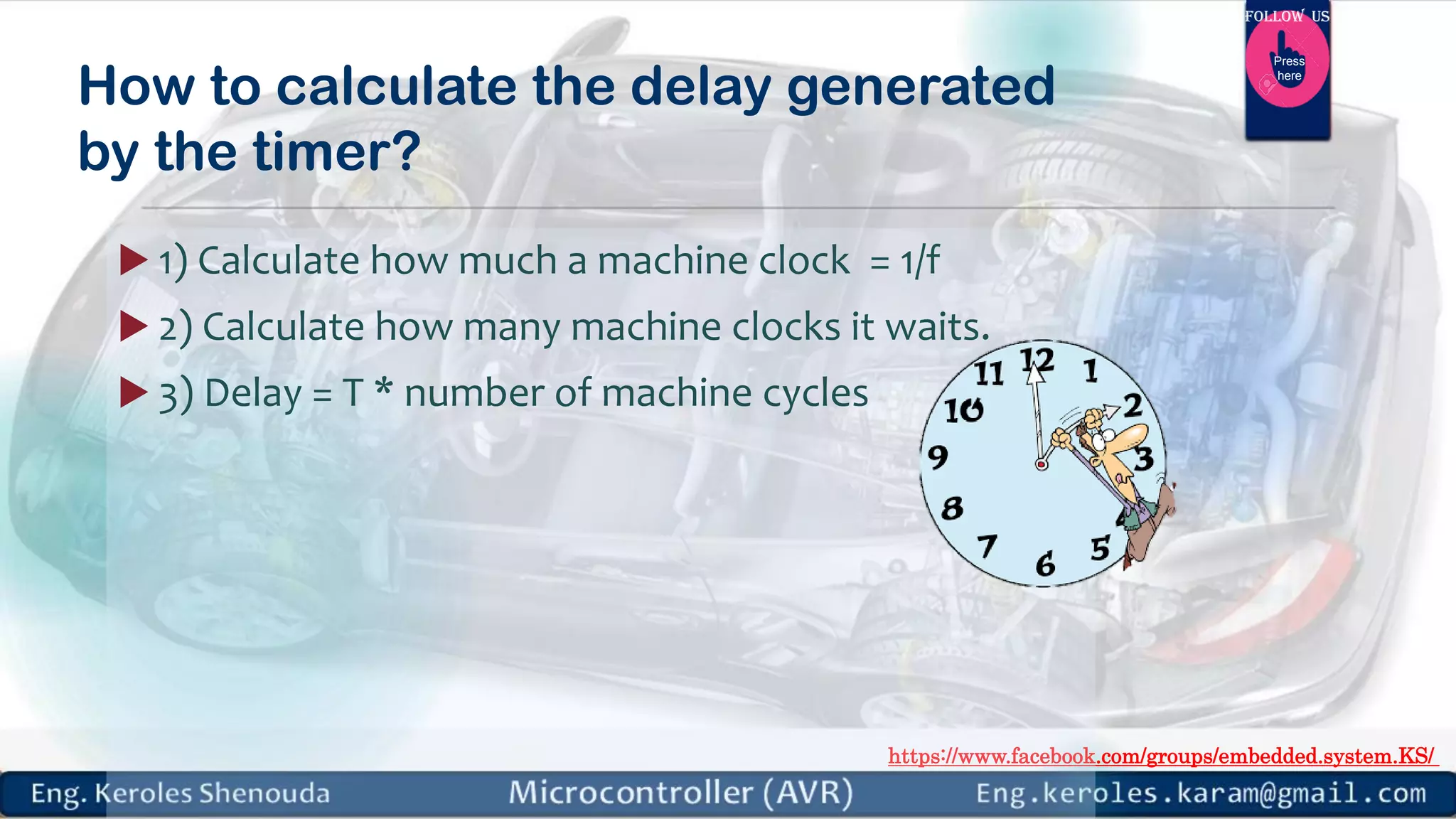
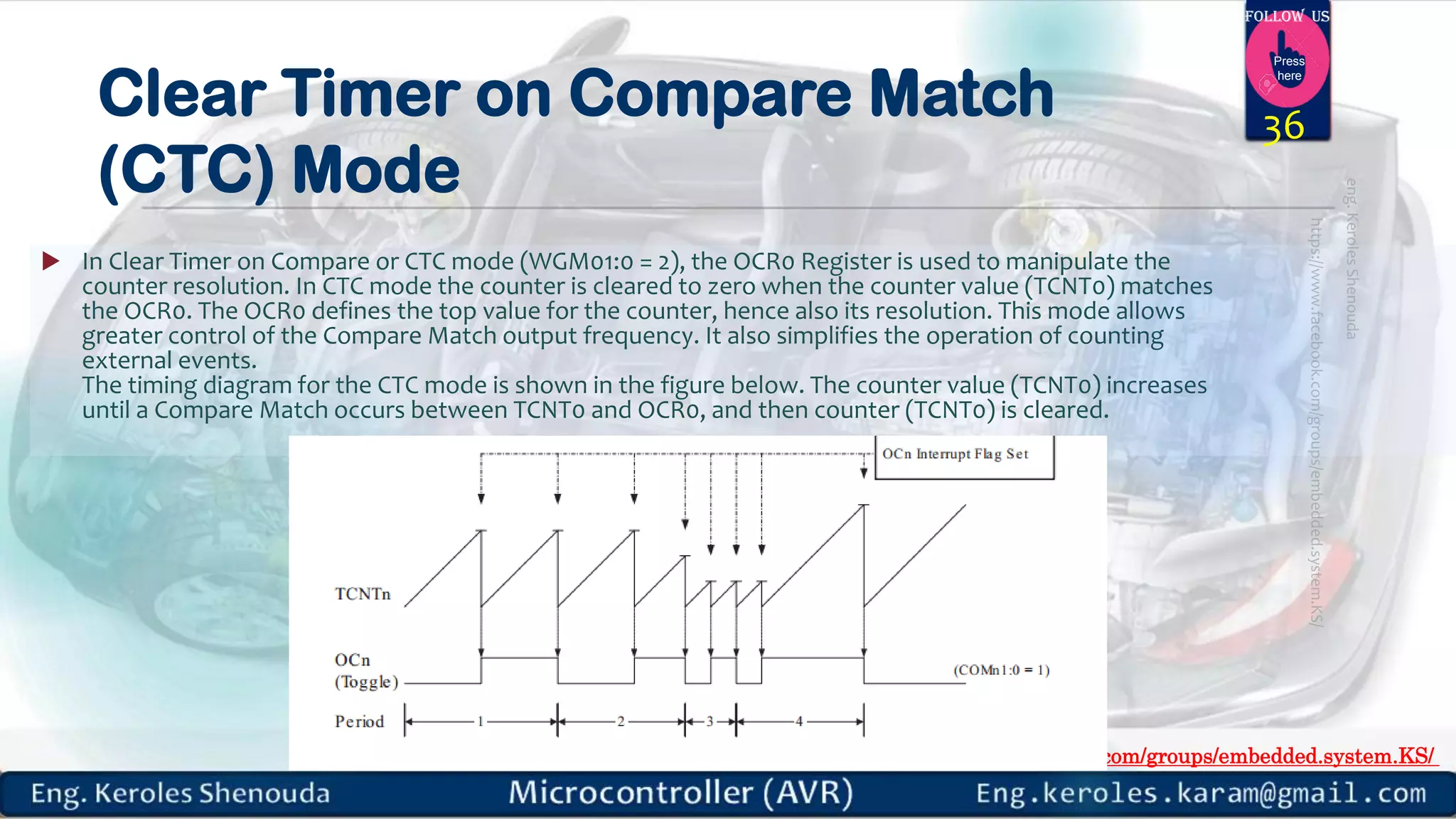
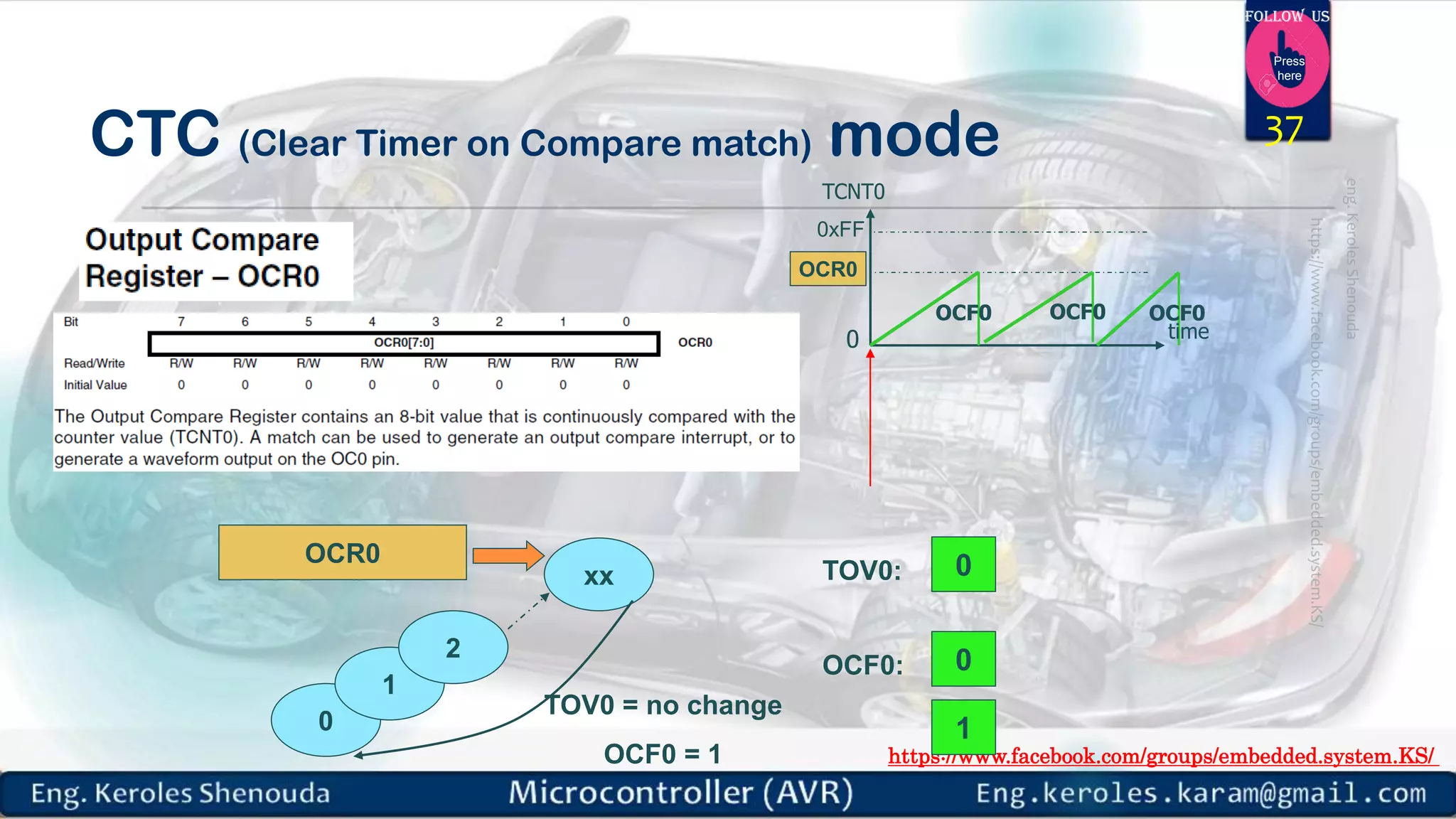
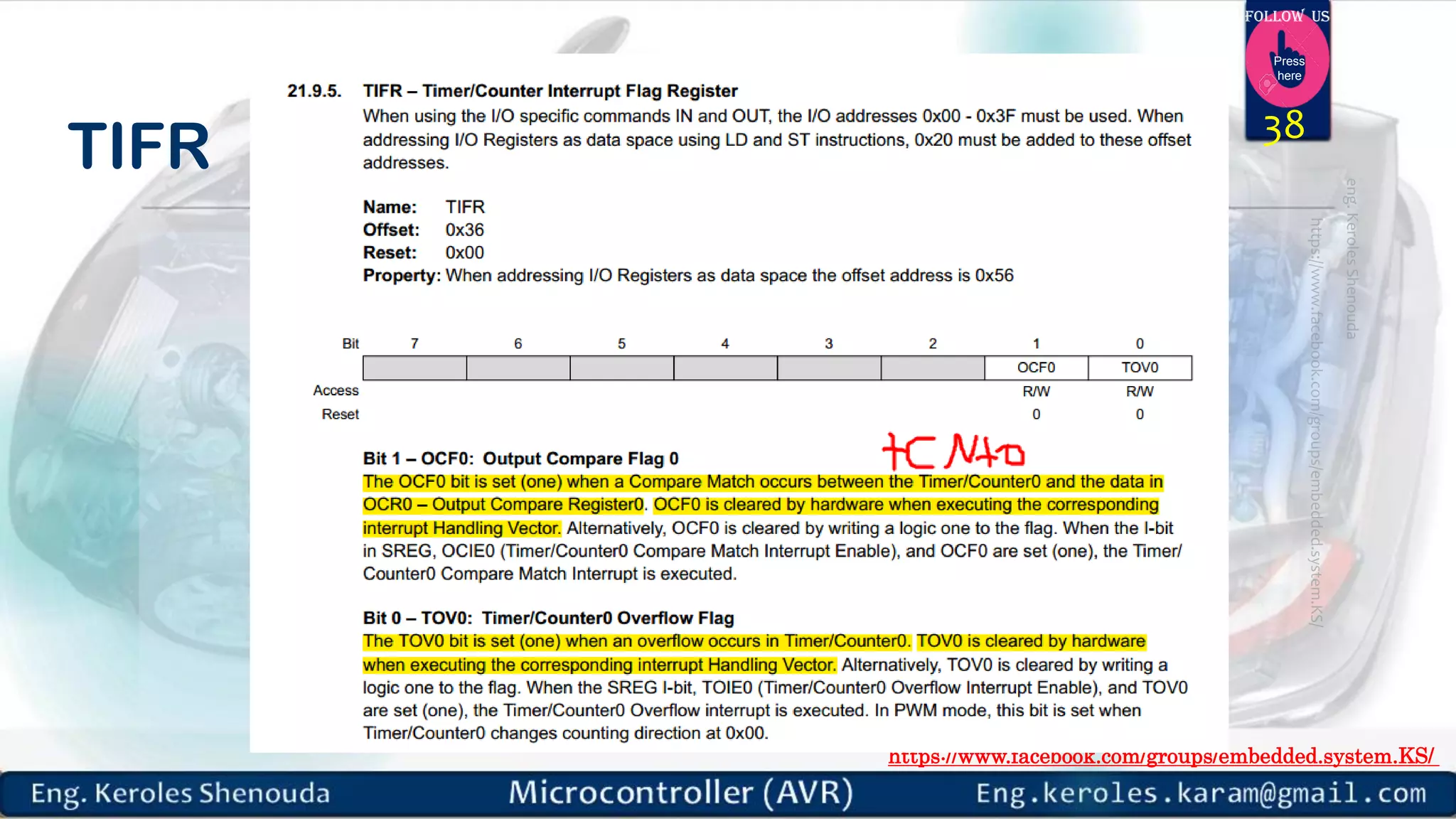
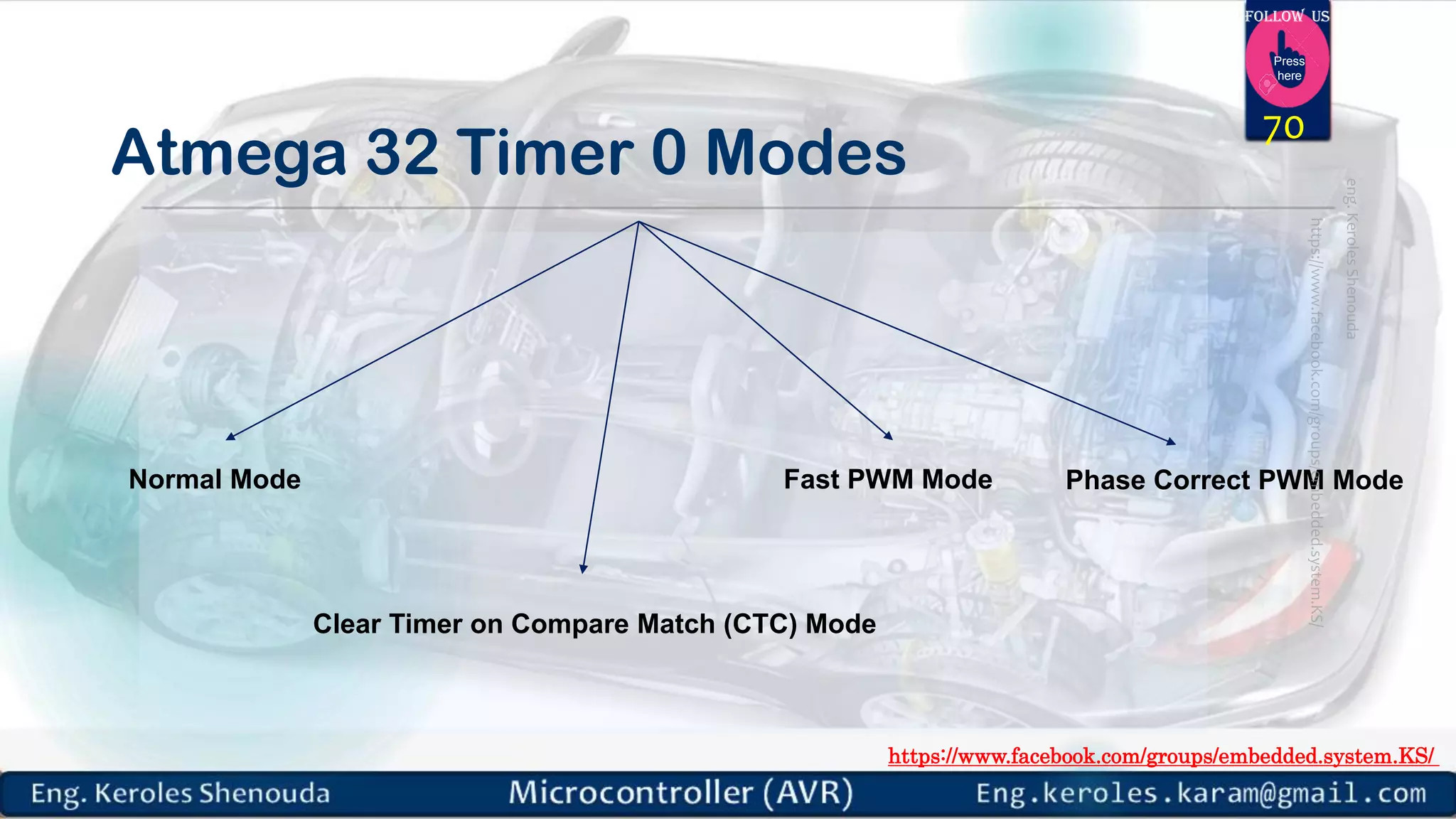
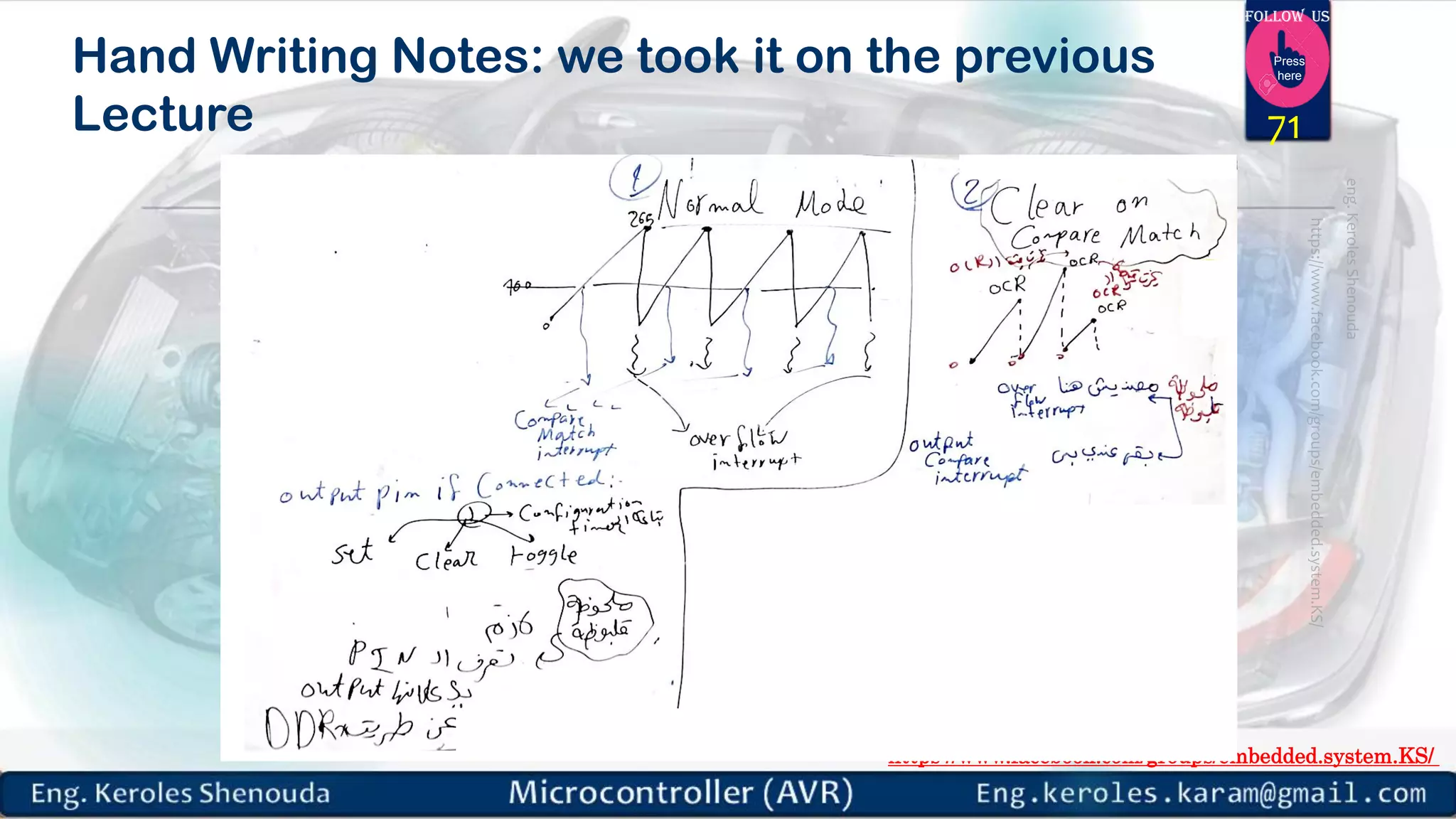
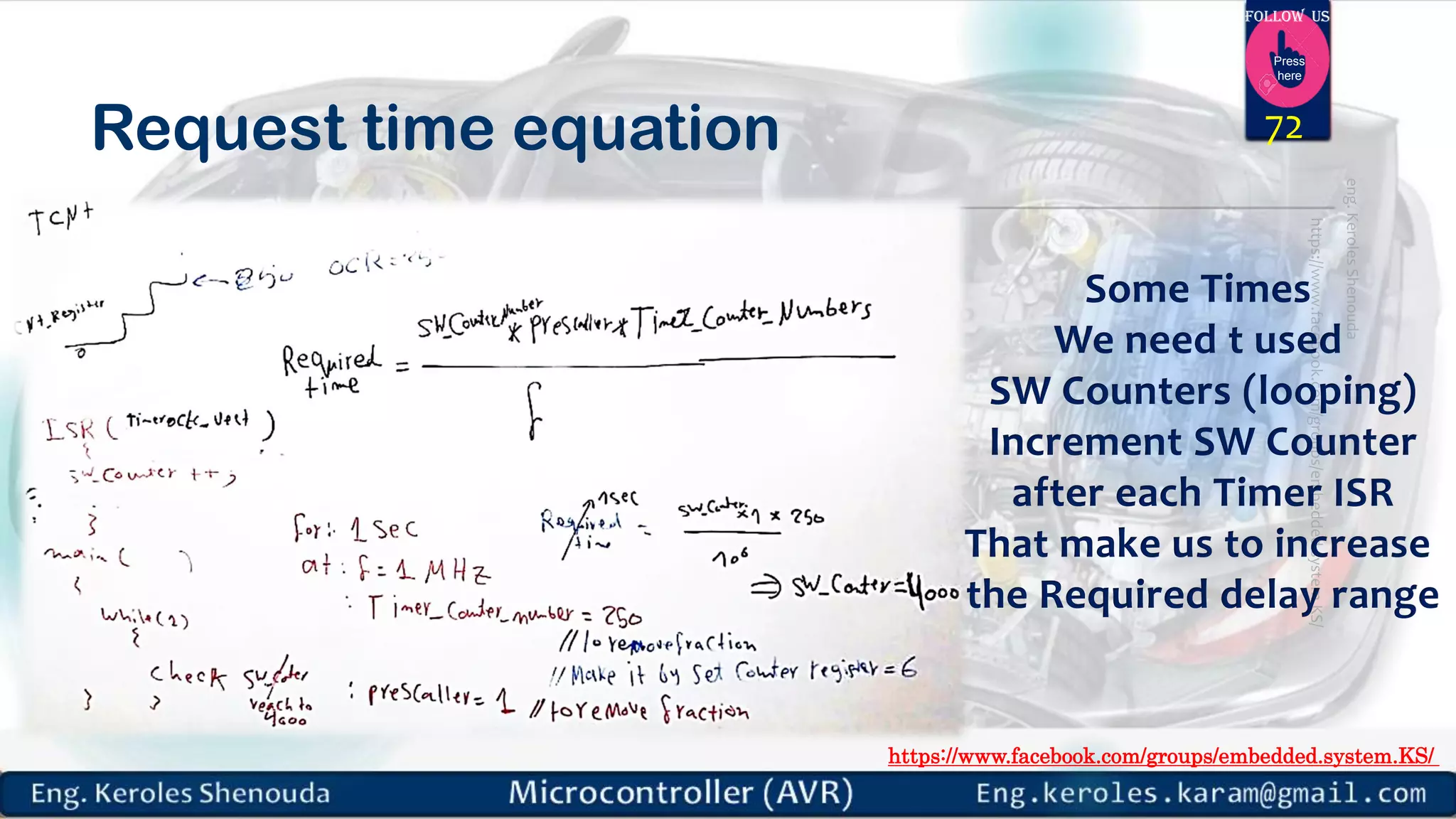
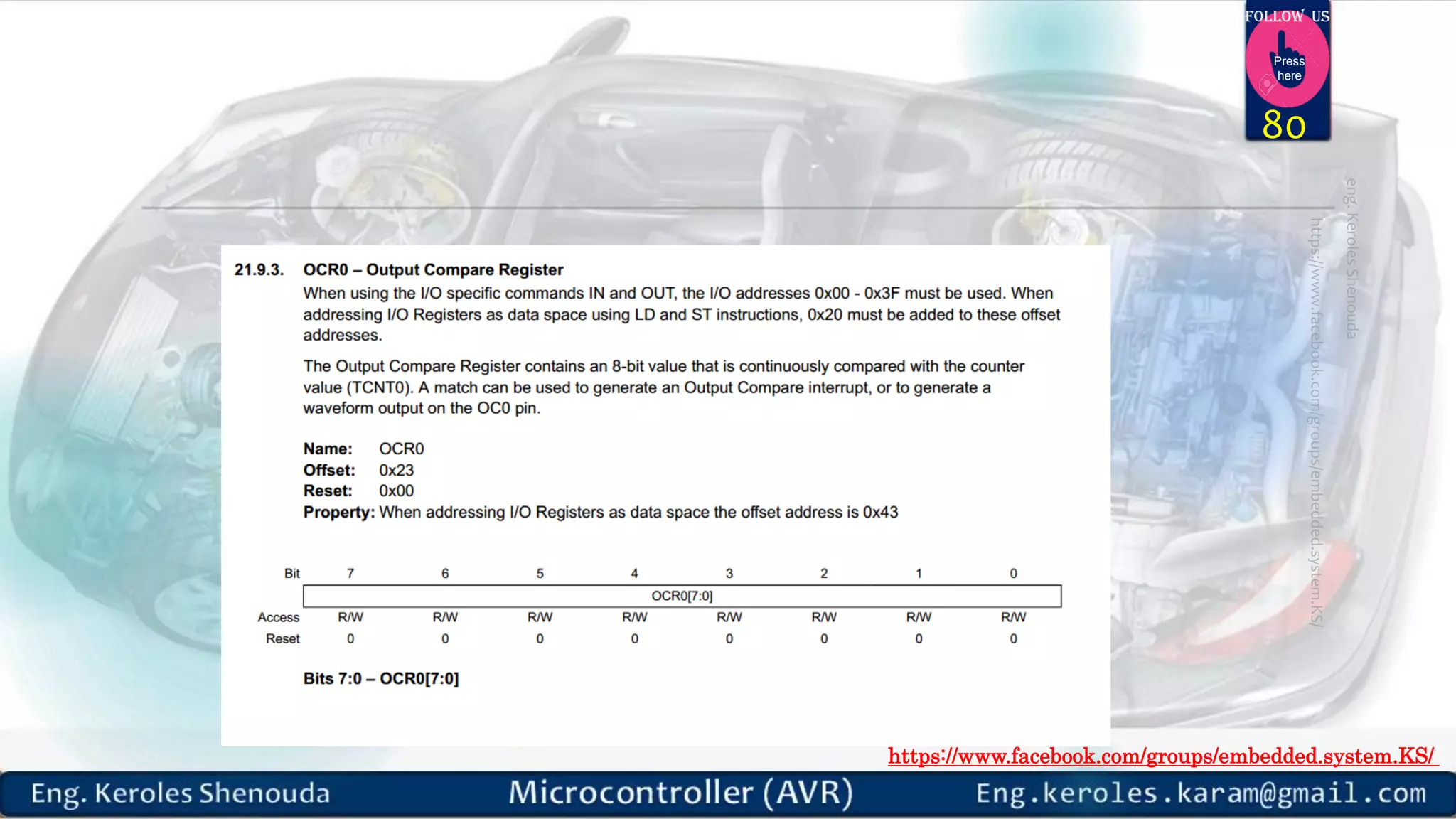
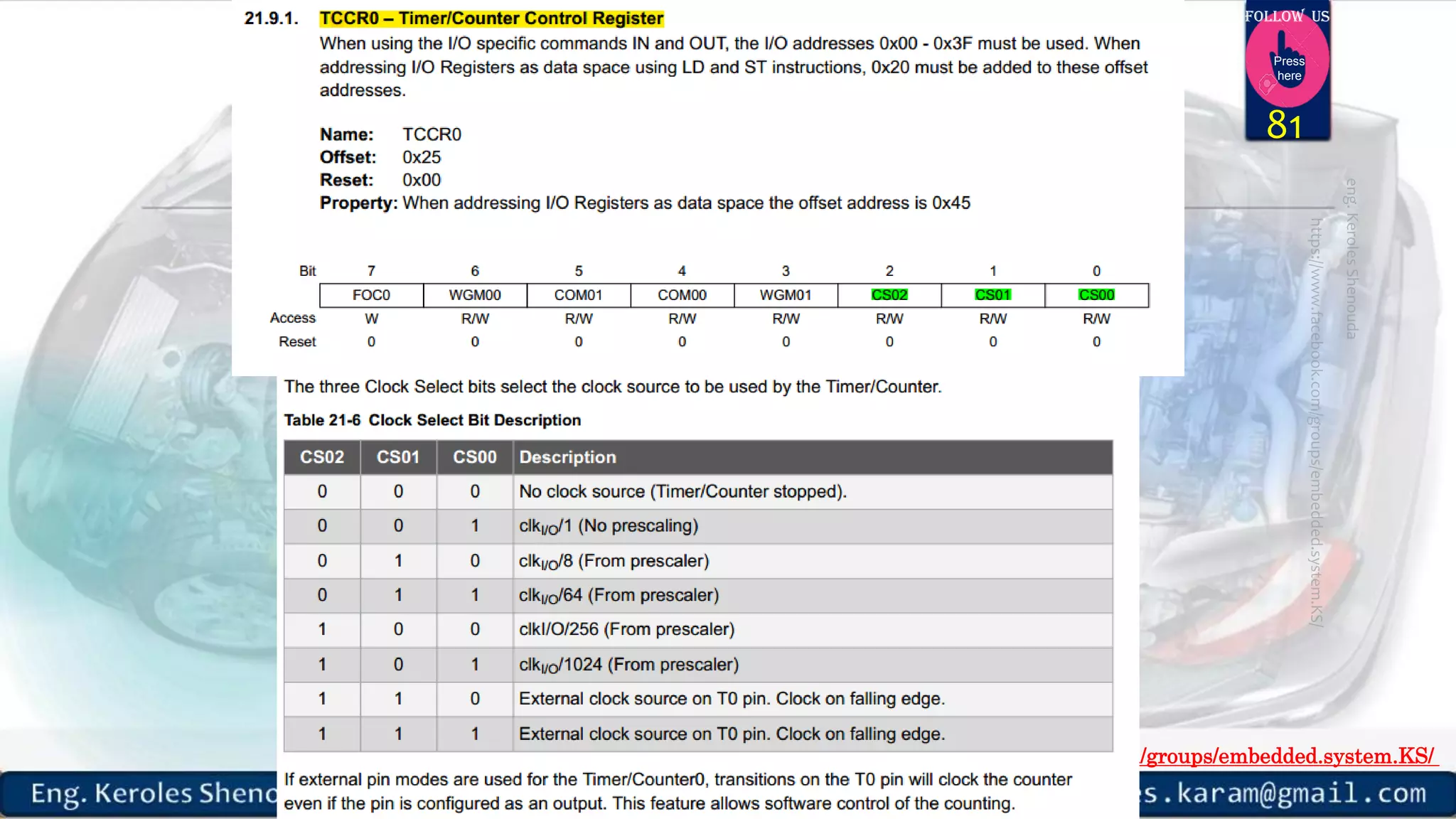
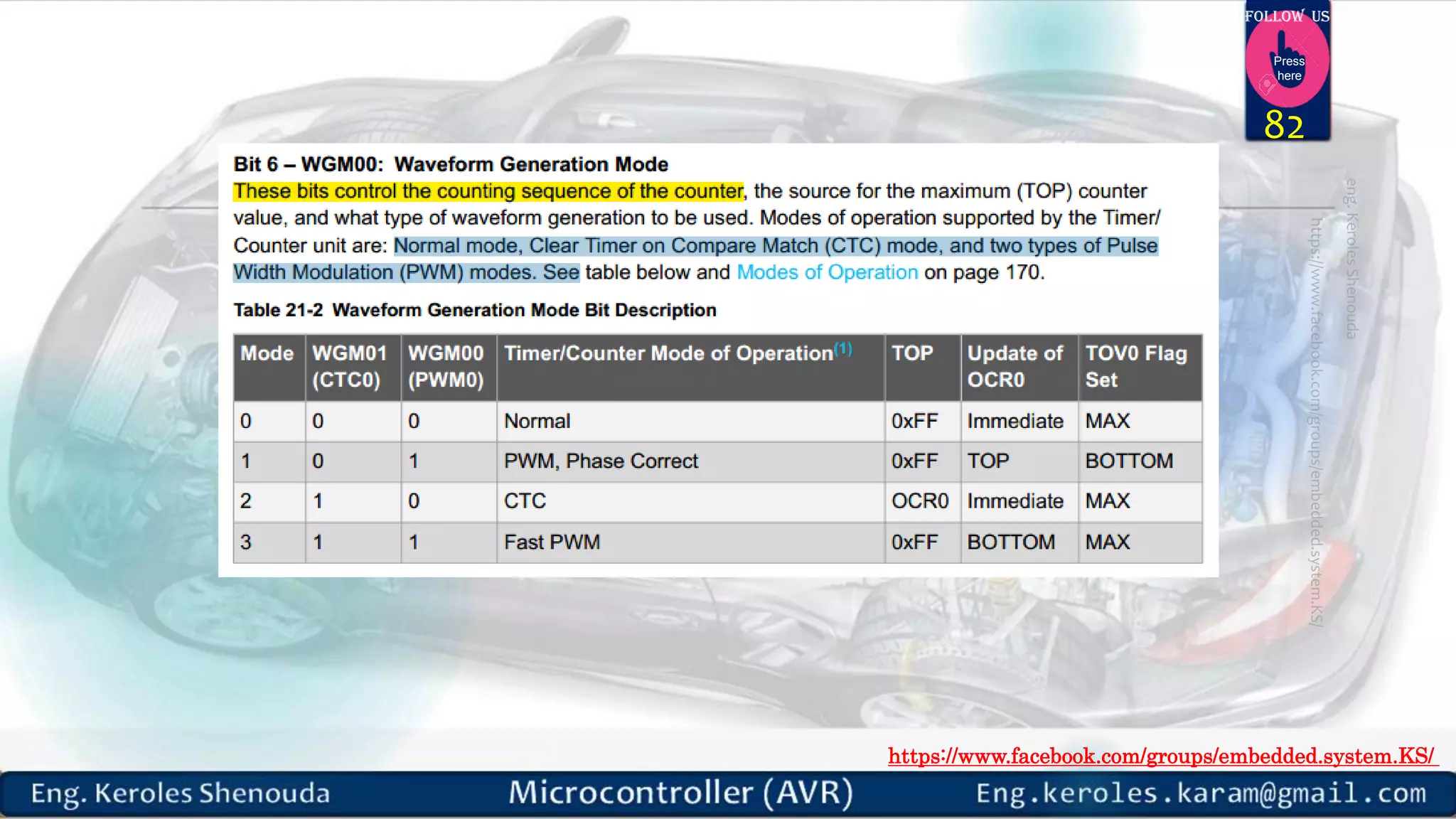
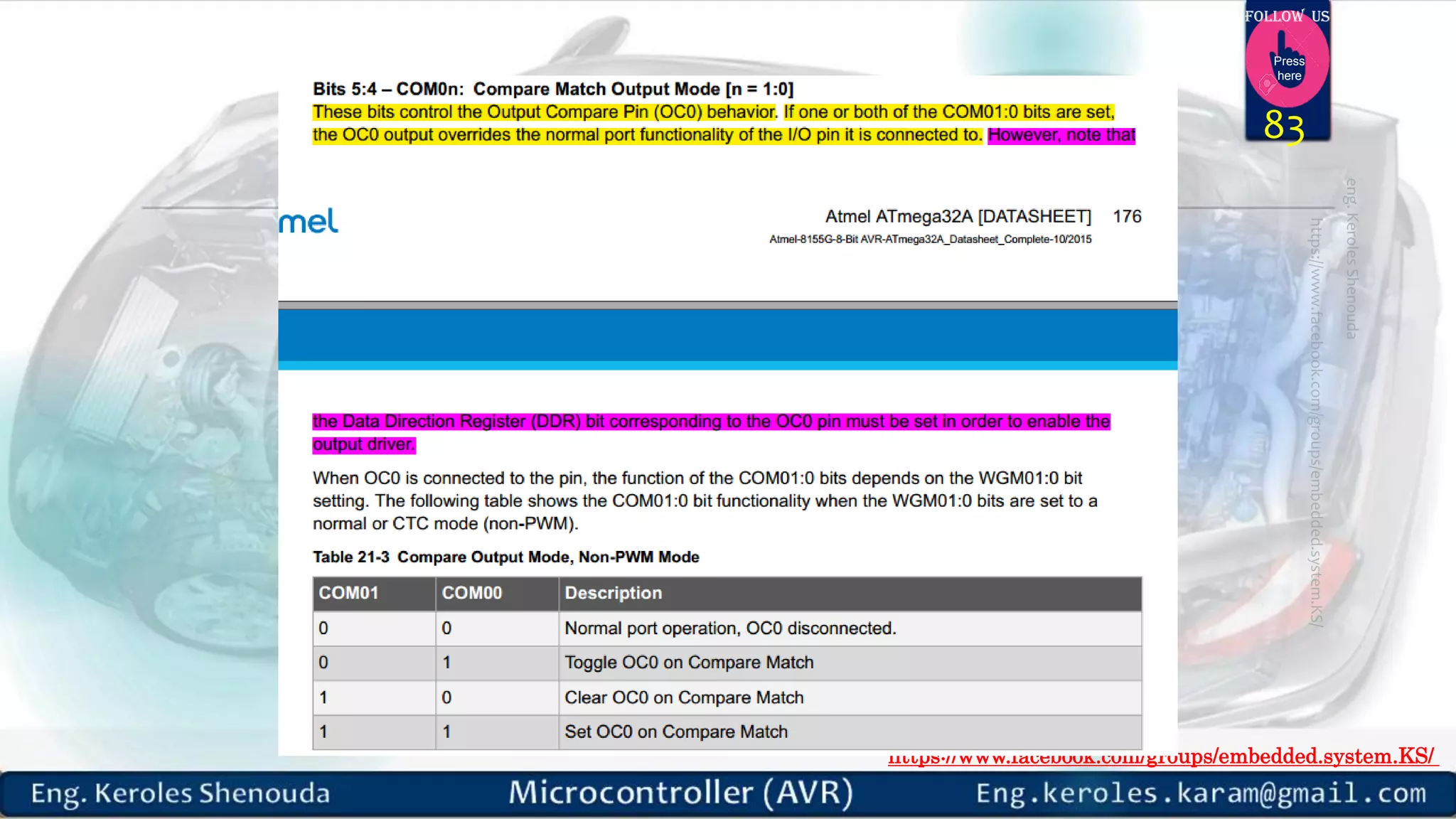
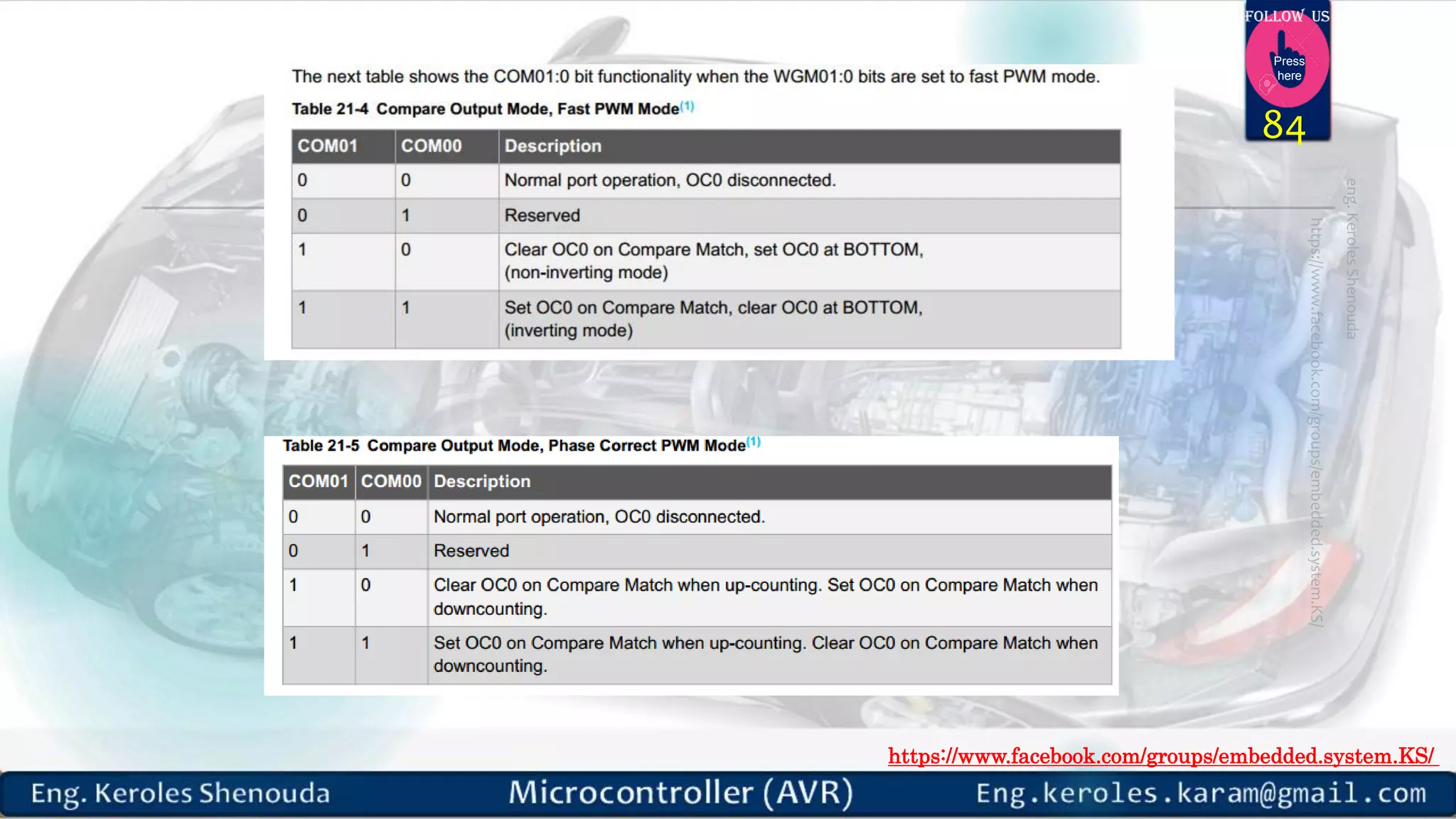
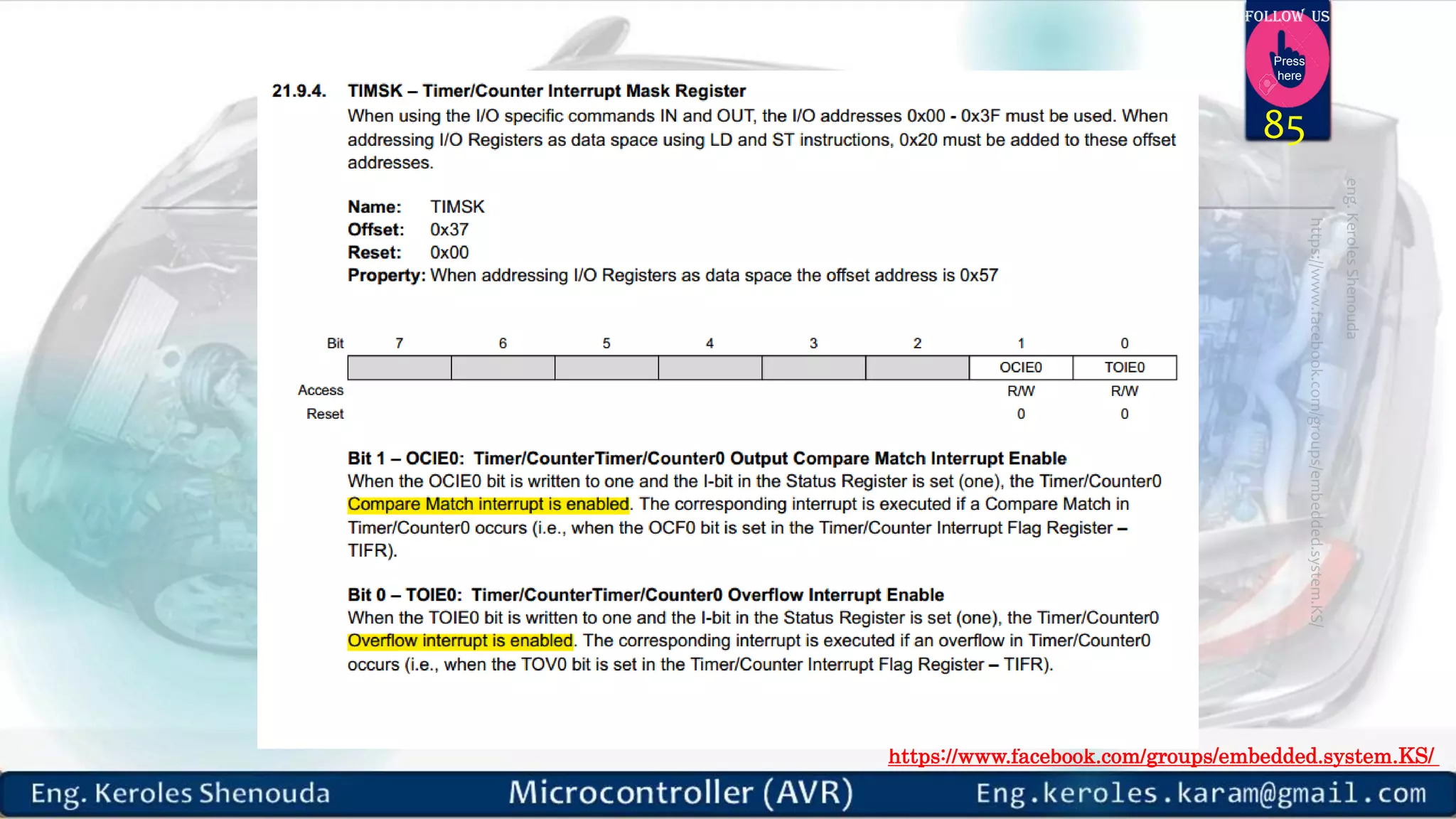
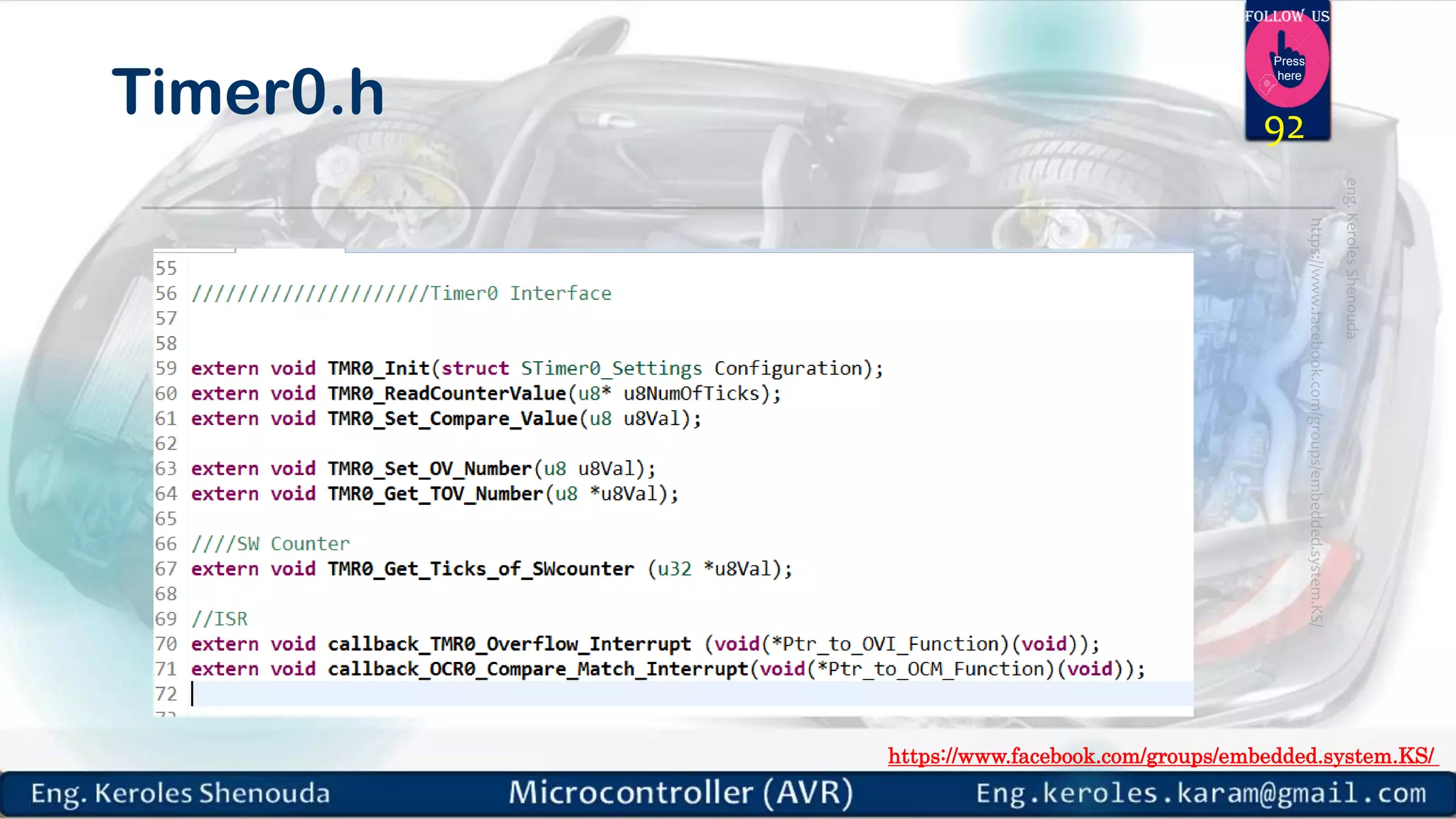
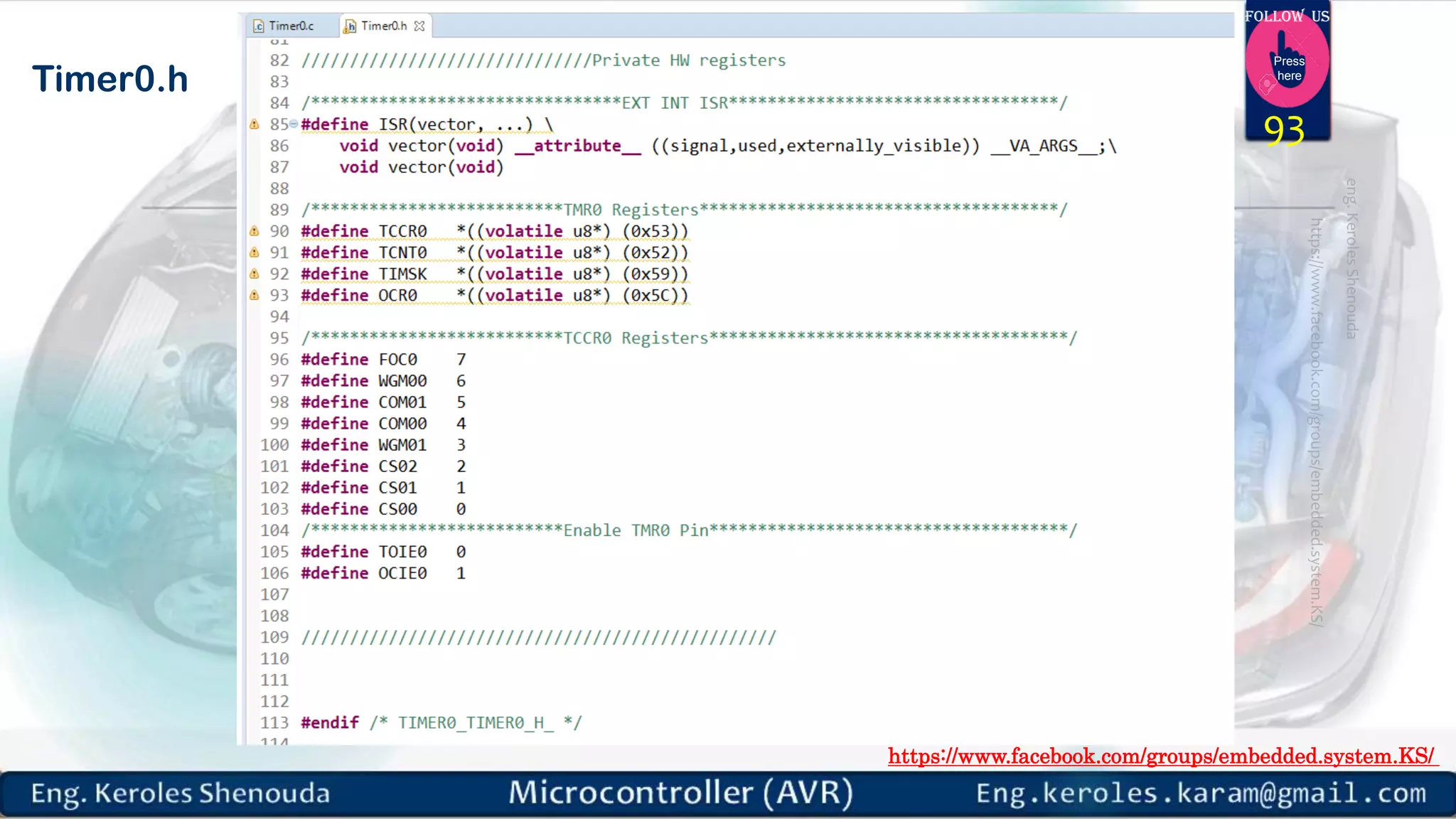
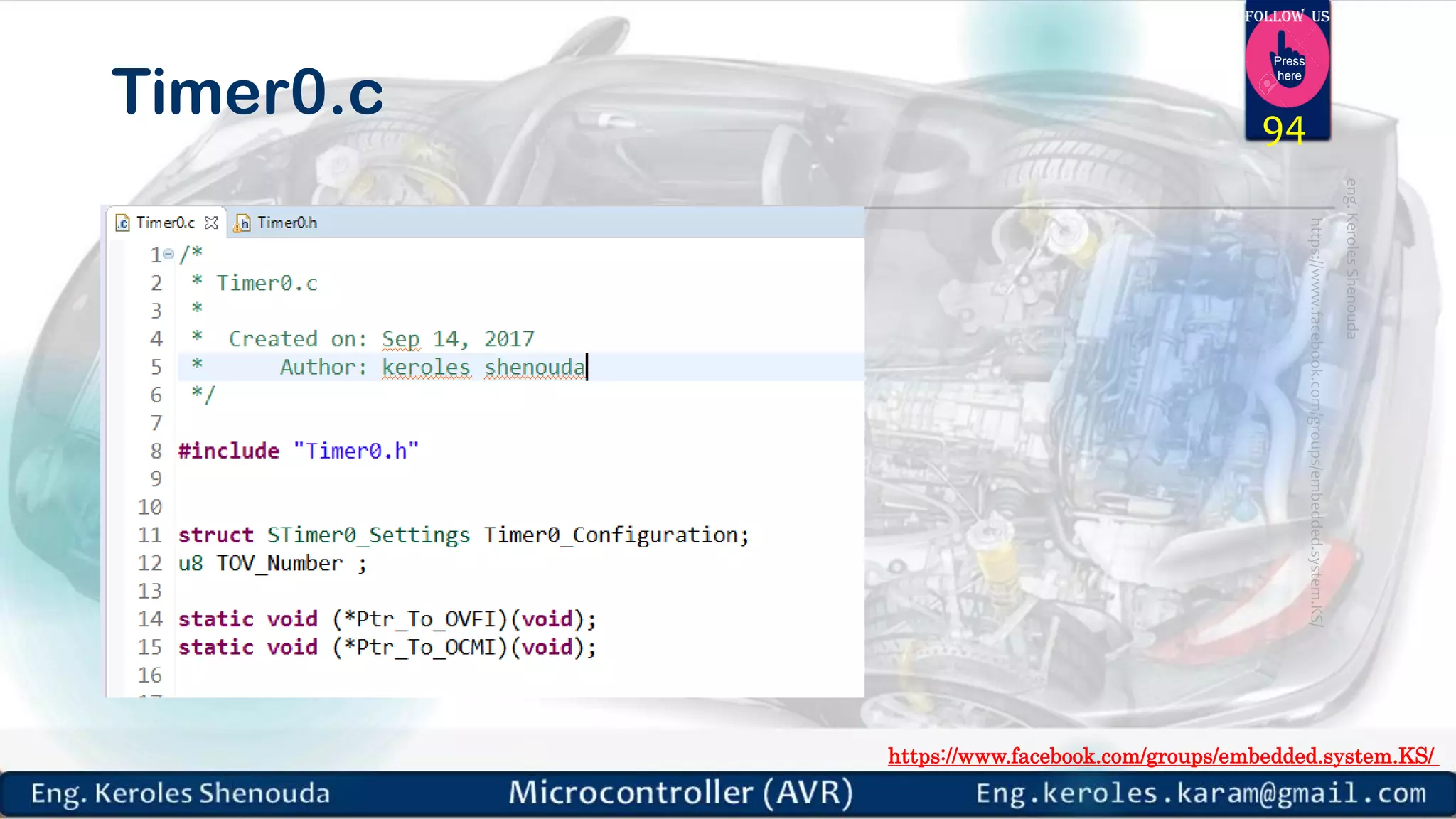
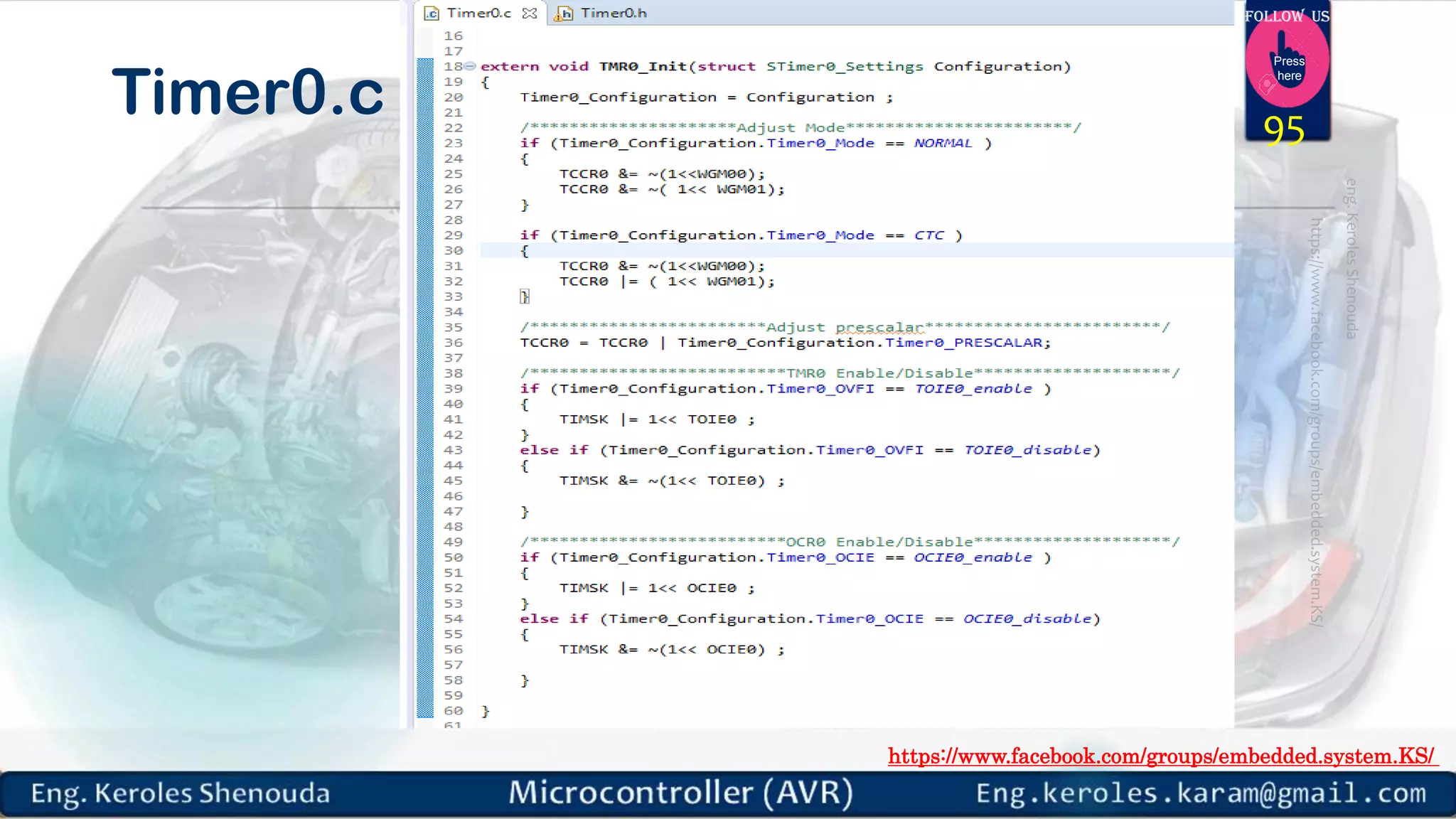
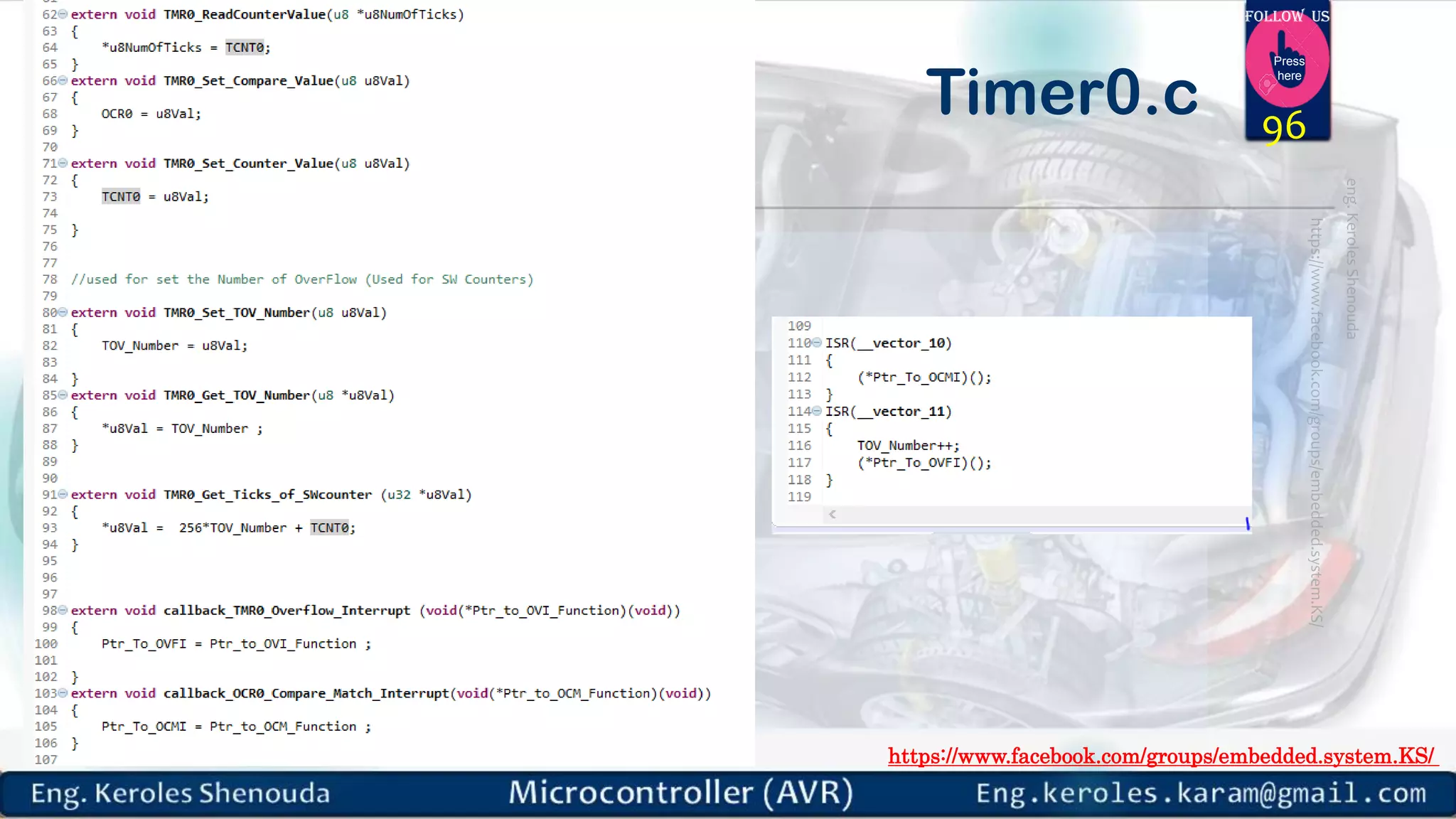
The document discusses timers and provides examples of using timers in normal mode on the ATmega32 microcontroller. It begins with defining what a timer is and how timers can count up, down, or up/down. It then discusses timer modes, infrastructure, and applications including delays, baud rate generation, and waveform generation. The document provides details on the timer registers and modes on the ATmega32, including normal mode. It gives an example of writing a program to wait 14 machine cycles in normal mode using Timer 0 on the ATmega32.